布站幾何對深海時差定位精度分布特性的影響
2020-05-13 02:25:50李智生邱仁貴
水下無人系統學報 2020年2期
張 旭, 李智生, 邱仁貴, 董 楠
布站幾何對深海時差定位精度分布特性的影響
張 旭1, 李智生1, 邱仁貴2, 董 楠1
(1. 中國人民解放軍91550部隊, 遼寧 大連, 116023; 2. 中國人民解放軍91650部隊, 廣東 廣州, 510320)
為在深海較大區域實現海上無源目標的可靠水聲定位, 測量設計中需對預選布站幾何條件下的精度和覆蓋特性進行有效估計。針對這一問題, 提出一種適用于多基站時差交會水聲定位體制的精度分布特性仿真分析方法。以北太平洋中部海區的環境條件構設仿真場景, 采用BELLHOP高斯束射線模型計算聲場, 應用Monte-Carlo方法迭加主要隨機誤差并傳遞到定位結果, 通過網格化和大子樣計算分別得出4基站、5基站和6基站3類典型幾何構型的均方根誤差(RMSE)空間分布。分析表明, 在會聚區聲信道條件下利用直達波與一次海底反射波進行定位性能有明顯差異, 前者精度相對較高, 后者覆蓋范圍相對較大。直達波定位精度由陣中心區域向陣邊緣區域逐漸減小, 而一次海底反射波定位則在陣中心數千米區域出現一個精度下降區。在處于頂角位置的基站失效或位于中心位置的基站偏移2種情況下, RMSE呈非對稱分布, 僅在密集交會的局部區域有相對較高的精度, 不能保證對全海區有效覆蓋。與以往的研究相比, 提出的方法滿足深海條件下布站幾何對精度分布和覆蓋特性影響的評估與分析需求, 可為測量系統的設計與應用提供參考。
水聲定位; 精度分布; 布站幾何; 多基站; 覆蓋特性; 深海
0 引言
采用多基站交會方式對海上無源聲目標進行定位時, 基站的幾何構型是決定測量精度的重要因素。在滿足最低解算條件的基礎上, 增加冗余基站通常可對改進定位精度有所貢獻。但在實際海上作業中, 可增加的冗余基站總是有限的, 大規模的密集布站往往難以實施(特別是在遠離岸站的深海區域), 在這種情況下, 布站幾何的設計和優化就成為一個重要問題。已有報道討論了四邊形陣[1-2]、三角形陣[3]、圓形陣[4]等典型幾何構型條件下的定位性能, 但現有報道大多針對淺海工況, 而對深海條件下的定位特性與布站幾何的相關性問題關注較少。
與基于方位交會的被動定位方法[5]相比, 時差交會方法[6]因具有更好的精度特性, 較適用于深海大范圍海區的被動聲目標定位測量。深海與淺海的聲信道條件明顯不同[7-8], 聲信息的到達方式和可檢測程度隨之變化, 需要結合深海聲傳播規律考慮相應的定位解算問題。哈爾濱工程大學曾在20世紀70年代末研制出我國第1套用于深海無源聲目標定位測量的水聲系統[9]。近年來, 隨著深遠海運載技術的不斷發展, 對于深海測試保障條件提出了更高的要求, 需發展多場景、全區域精度分析方法以支撐測量系統論證設計。盡管深海無源聲目標的定位方法不斷發展, 但從海上試驗結果的報道來看, 對于數十千米的測量范圍在稀疏布站條件下獲取較高精度仍較為困難[10-11]。近期關于深海時差定位特性的報道揭示了深海條件下雙曲線交會呈現出與收-發條件和聲傳播相關的變異性[12], 但對于測量海區全區域精度分布特性與布站幾何的相關關系問題尚未開展研究。
文中針對在深海數十千米范圍內利用水下接收器到達時差定位水面聲目標的工況, 通過數值仿真方法分析得出直達波與一次海底反射波的覆蓋特性與精度分布特性, 初步建立了對深海聲信道條件下的時差定位性能與布站幾何關系的認識, 提出的方法和得到的結果與以往淺海背景下的研究有較明顯的不同。
1 工況條件假設
假設測量作業的工況條件如圖1所示。

圖1 定位測量工況示意圖
1) 要求對16 km×16 km測量海區內隨機出現的、具有可識別聲信號特征的水面目標進行定位, 獲取其二維位置坐標。
2) 以無人水面船作為測量基站, 以吊放搭載的聲接收器為測量載荷, 將現場獲取的到達目標聲信號以及測量基站、海洋環境等測量信息實時傳輸至地面站進行快速求解, 實現對隨機水面目標的實時定位。其中, 測量元素為目標聲信號的到達時差(由接收聲信號估計到達時間, 每2個基站可形成一組到達時差); 無人水面船位置信息由衛星導航定位設備提供, 接收器與船體的相對位置信息由船載超短基線定位設備提供; 根據現場測量的聲速剖面計算聲場和聲線追蹤參數, 用于輔助解算。為在深海聲信道條件下獲取較大的直達波作用范圍, 需將聲接收器放置在較大的深度, 考慮到海上工程條件限制, 將最大布放深度設為1 000 m。
3) 測量海區選取在北太平洋中部, 水深5 500 m, 海底平坦, 聲速剖面由WOA09數據集[13-14]給出的數據計算(見圖2(a)), 環境不確定性引起的全深度平均聲速起伏小于3 m/s。采用BELLHOP高斯束射線模型[15]計算聲場, 聲系統中心頻率1 kHz, 掠射角范圍0.1°~89°, 間隔0.18°, 水平方向計算范圍為0~30 km, 網格間距0.1 km, 垂直方向計算范圍為海面至海底, 網格間距20 m。計算得到的傳播損失場見圖2(b), 圖中虛線處為接收深度, 聲壓通過全相干方式疊加。由圖可見, 上述環境和收-發條件下的聲信道樣式為有弱表面波導的會聚區型聲信道, 在30 km處約為1/2個會聚區的距離, 聲場中亮區與影區邊界相對分明, 亮區主要為直達波攜帶的能量, 影區則包括海底反射的聲能以及少量衍射效應產生的聲能。因此, 用于定位解算的聲路徑優先考慮直達波聲路徑(記為RR), 其次是一次海底反射波聲路徑(記為RB), 前者作用距離相對較近, 但信噪比高、時延誤差小; 后者主要用于直達波作用距離之外的區域, 信噪比相對較低, 但作用距離大。對于文中工況, 直達波只能覆蓋有限的區域, 而一次海底反射波則可覆蓋全部測量海區。
4) 考慮到在深海離岸環境下開展測量作業的局限性, 將水面基站數量限定為不超過6個。
2 仿真算法設計
根據上述假設條件, 為開展不同幾何布站條件下的測量區域精度分析, 基于Monte-Carlo方法建立以下仿真算法。
1) 建立坐標系

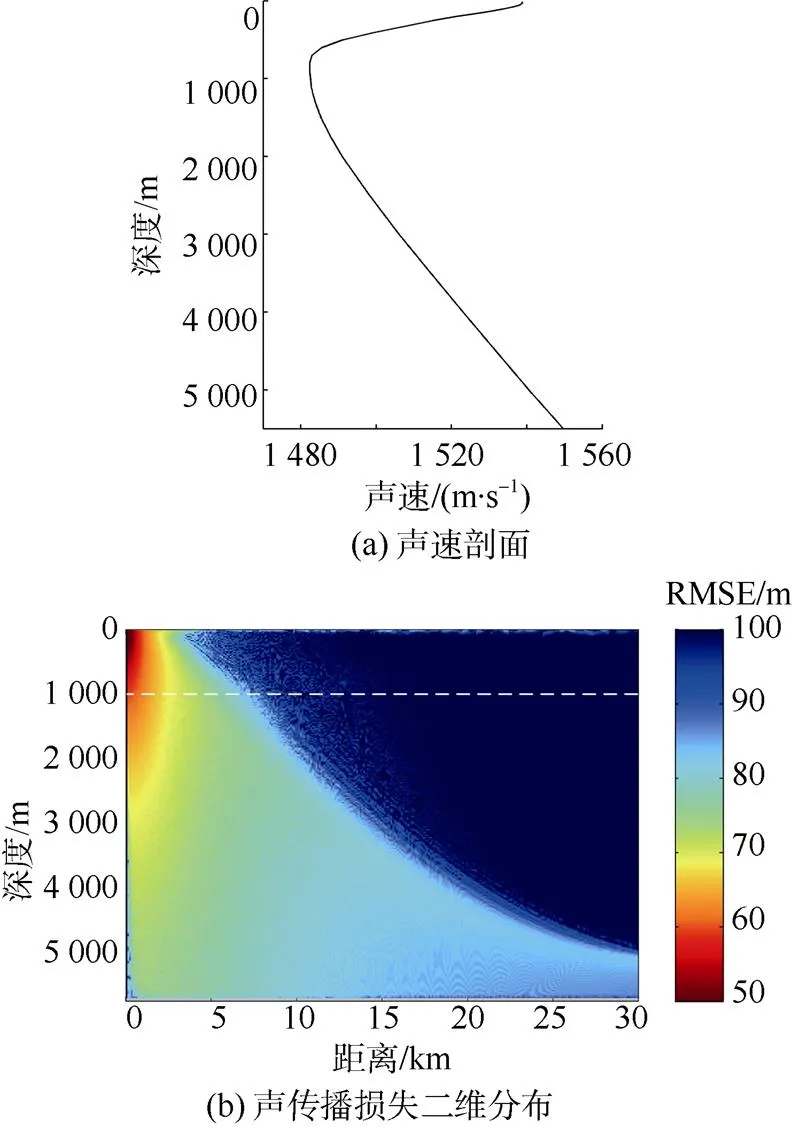
圖2 聲速剖面及聲傳播損失圖
2) 計算聲場和提取聲信息
應用BELLHOP模型分別計算直達波和一次海底反射波的本征聲線和傳播損失。根據聲吶方程, 到達各基站的信噪比與傳播損失滿足

3) 迭加測量誤差

4) 估計待測參數
根據上述定義, 待測目標與基站之間的斜距可表示為


進而可建立目標相對于初始位置的時差變化與位置變化的關系式(若以基站1作為參考基站)[12]
式中:
其中:



在此基礎上, 可根據高斯-馬爾可夫理論給出目標參數的估計值[16]

5) 歷遍區域網格

3 典型布站情況仿真
以下分別考慮4基站、5基站和6基站3種典型的布站幾何構型, 通過比較3種情況下覆蓋特性和精度分布特性的差異分析布站幾何對定位性能的影響。圖3顯示了上述3種布站幾何, 并依據信噪比條件給出了直達波覆蓋特性(根據前文假設, 一次海底反射波對測量海區是全覆蓋的)。圖中紅點表示基站位置, 紅線方框表示要求覆蓋的測量區域; 圖中數字表示直達波定位時參與交會解算的基站數, 其區域間差異由灰階色差表示。
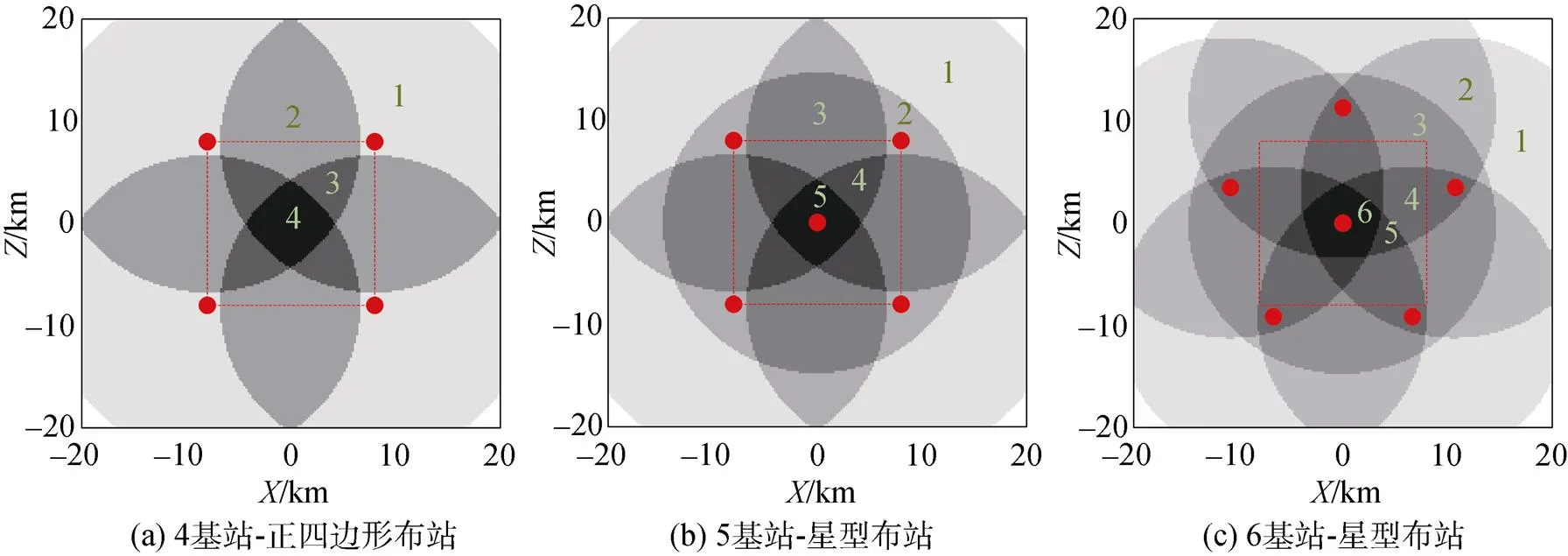
圖3 3類典型布站幾何及覆蓋特性
為對比測量基陣內部與外部的精度變化, 將計算區域設為24 km×24 km(其中心區域為要求覆蓋的16 km×16 km測量海區), 劃分為201×201個格點, 按照上述仿真算法對格點逐一進行計算, 得到海區二維平面的精度分布矩陣。對每個格點進行1 000次抽樣, 其統計結果可反映精度水平的總體特征。圖4顯示了3種布站條件下的RMSE分布, 圖中區分了直達波與一次海底反射波定位的結果, 通過色標反映RMSE量值差異,黑點表示基站位置, 虛線方框表示要求覆蓋的測量區域。
從宏觀分布來看, 測量海區的定位精度主要有以下幾方面特征:
1) 在會聚區聲信道條件下, 接收器位于上層海洋時高信噪比的直達波所覆蓋的區域總是有限的, 在4基站構型條件下, 如圖4(a)所示, 基陣邊緣附近有大面積直達波無法覆蓋的區域, 隨著有效基站數量的增加, 覆蓋區域逐漸擴大且精度提升, 對于前文假設, 在6基站構型條件下, 如圖4(e)所示, 可使測量海區內99%以上的區域達到優于30 m的精度;
2) 直達波與一次海底反射波定位性能有明顯差異, 前者精度相對較高, 而后者覆蓋范圍相對較大;
3) 由于目標聲信號的作用距離受信噪比限制, 測量海區內不同位置可接收的目標聲信號作用距離與目標和基站的相對位置有關, 參與交會解算的基站組合空間變化使RMSE出現區域上的不連續, 在圖中表現為由色差“躍變”形成的輪廓線;
4) 相對高精度區僅出現在基站包絡范圍之內, 而包絡范圍之外隨交會點的減少精度迅速下降。
從精度分布特征來看, 直達波與一次海底反射波定位的RMSE可分為2個量值等級, 如圖5所示, 圖中橫軸為沿基陣中心(0, 0)與測量海區西北(–8, 8)連線方向。前者的精度主要在20~30m量級, 而后者主要在40~80 m之間變化。對于直達波定位, 最高精度出現在陣中心附近, 這是因為該區域參與交會的有效基站數最多, 且精度隨基站數的增加進一步提升, 4基站構型條件下距中心5 km范圍內的RMSE為20~25 m, 而6基站構型條件下減小到15~20 m, 對于一次海底反射波定位, 當陣中心附近有基站時, 如圖4(d)和圖4(f)的情況, 從基陣中心到基陣邊緣精度隨距離不是單調變化, 在基陣中心2.5 km范圍內RMSE出現一個顯著增加的區域, 其量值可達70~80 m, 而在這個區域之外RMSE下降到40~50 m, 此后呈現隨距離增加的趨勢, 到10 km之外RMSE迅速增大到80 m以上。該現象的出現與本征聲線及等效聲速的特性有關, 在中心附近一次海底反射波的到達時延與直達波的到達時延相差可達數秒的量級, 等效聲速減小到每秒數百米, 代入解算時相對于直達波的等效聲速相對較高(約1400~ 1500 m/s)的情況其二次曲線交會特性明顯變差; 隨著距離增加, 一次海底反射波的等效聲速不斷增大, 與直達波的差值逐漸縮小, 低等效聲速的影響隨之減弱。

圖4 3類典型布站幾何條件下的X-Z平面RMSE分布
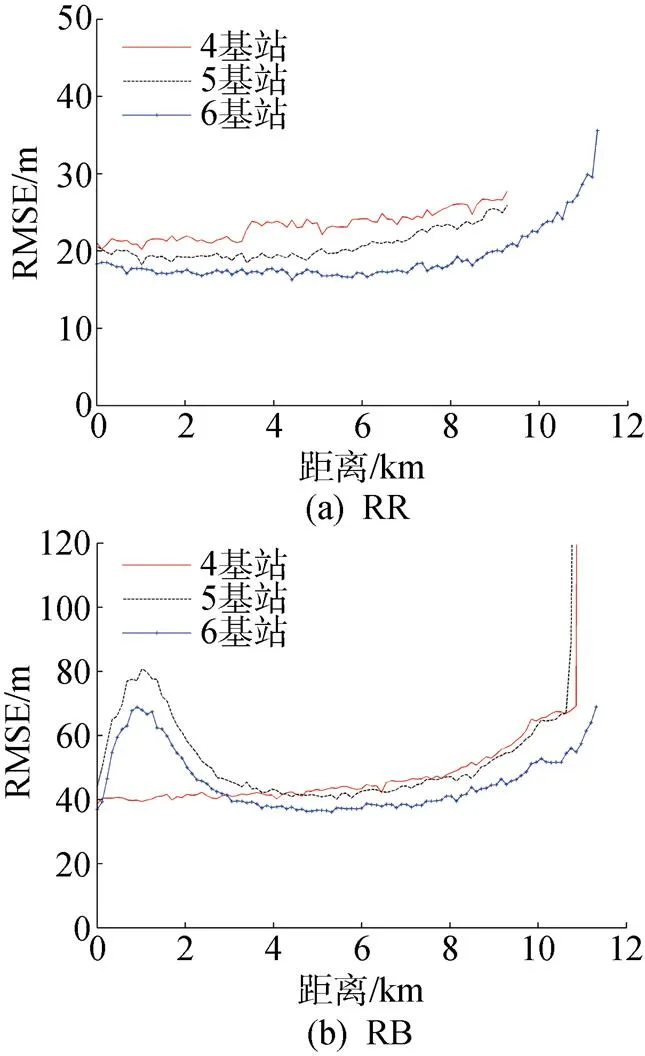
圖5 RR與RB定位的RMSE曲線比較
表1和表2給出了上述算例中RMSE的分位數統計及RMSE達到某一精度水平的覆蓋區域百分比。根據表1, 在4基站構型條件下, 若采用直達波定位, 有80%的區域(0.1分位數與0.9分位數之間)RMSE位于21.2~26.1 m之間, 若采用一次海底反射波定位, 則RMSE增大到40.9~52.9 m; 在5基站構型和6基站構型條件下(仍考慮80%區域), 直達波定位的RMSE分別減小了約4 m和6 m, 而一次海底反射波定位分別減小了約1 m和6 m, 說明從4基站構型到6基站構型無論是直達波定位還是一次海底反射波定位, 定位精度都有明顯提升。根據表2, 若采用直達波定位并將RMSE優于30 m劃定為高精度區, 4基站構型條件下僅有51.3%的區域達到此精度, 而5基站構型和6基站構型條件下分別為87.7%和99.6%; 若將RMSE優于50 m劃定為可接受的精度, 4基站構型條件下的覆蓋區域仍為51.3%(相對于RMSE優于30 m的情況沒有提升), 而5基站構型和6基站構型則分別提升至97.3%和100%, 說明從4基站到6基站不僅提升了精度, 而且定位覆蓋性能也有顯著提升。對于一次海底反射波定位, 5基站構型和6基站構型條件下由于基陣中心的精度變差, 整體定位性能不及直達波, 而4基站構型條件下若可接受的精度指標下降, 則覆蓋特性可明顯提升, 例如若要求達到的RMSE標準從優于30 m下降至優于50 m, 則覆蓋范圍從0提升到79.1%。

表1 不同定位條件下RMSE的分位數統計(單位: m)
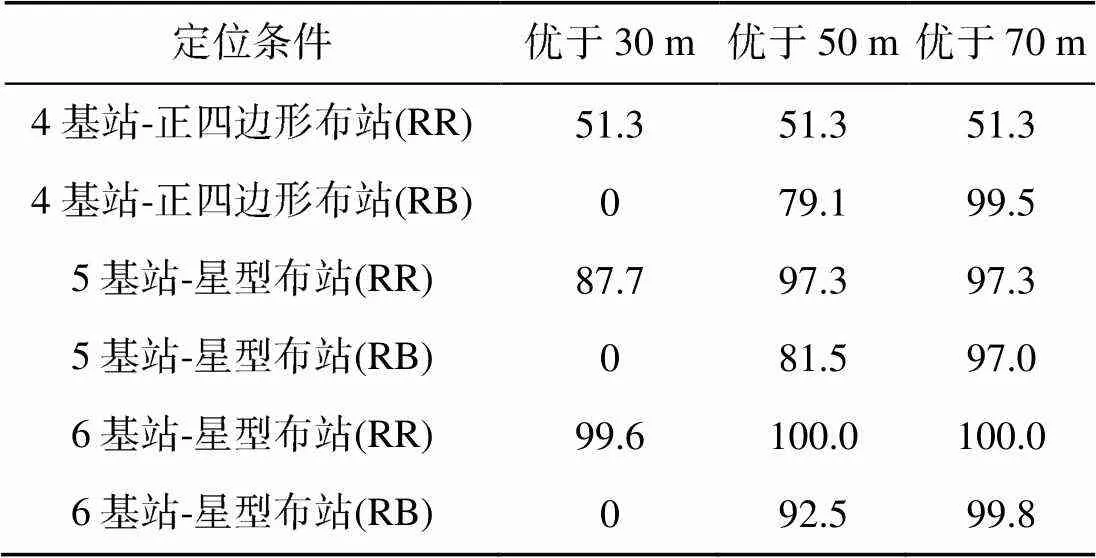
表2 不同定位條件下RMSE優于某一精度水平的區域占測量區域的百分比(單位:%)
綜合考慮上述3類布站幾何, 4基站構型的覆蓋能力對于16 km×16 km測量海區顯得不足, RMSE優于30 m的區域僅接近50%; 相比之下, 5基站構型和6基站構型的覆蓋能力相對較好。但若進一步考慮深海離岸作業實施上的困難性, 在要求精度允許的條件下(如要求RMSE優于50 m的區域不低于90%, 或RMSE優于30 m的區域不低于80%等), 5基站構型比6基站構型縮減了一個需要運載的測量平臺, 在工程應用層面更具合理性。
4 特殊布站情況討論
上述討論的3種情況均為對稱型布站, 而在實際工況下很可能要求在非對稱布站條件下進行測量。為檢驗算法對非對稱布站的響應, 設置以下3種情況:
1) 構成外圍基陣包絡的基站中有單個基站失效引起的非對稱布站幾何;
2) 位于基陣中心的基站明顯偏移引起的非對稱布站幾何;
3) 僅由局部子基陣形成的非對稱布站幾何。
圖6~圖8分別給出了3種情況下的案例, 并通過直達波覆蓋特性及RMSE分布圖進行說明。
4.1 單個基站失效
分別考慮4基站、5基站和6基站構型中位于軸和軸正向的頂角附近的基站失效帶來的影響。如圖6所示, 其中(a)~(c)為直達波定位時參與交會解算的有效基站數分布, (d)~(f)為對應的RMSE分布, 布站幾何的不對稱直接導致交會覆蓋的不對稱和精度分布的不對稱。在4基站條件下, 只有沿失效基站反向的小部分區域才有定位結果, 且精度顯著下降, RMSE增大到30 m以上; 在5基站和6基站條件下, 由于有中心基站的補充, 覆蓋區域擴大, 精度也隨之提升, 6基站條件下相對高精度區達到測量海區的50%以上。但整體來看, 在外圍基陣包絡關鍵節點基站失效的情況下, 直達波定位無法覆蓋到整個測量海區, 且有相當大的區域精度較差。
4.2 中心基站偏移
考慮5基站條件下位于基陣中心的基站分別向軸正向、軸正向和-平面45°方位偏移4 km時帶來的影響。如圖7所示, 其中(a)~(c)為直達波定位時參與交會解算的有效基站數分布, (d)~(f)為對應的RMSE分布。中心基站的位置變化對于相對高精度定位區域的分布影響明顯, 總體趨勢是在基站相對密集的區域趨于壓縮, 在基站相對稀疏的區域趨于擴展, 且與參與交會解算的基站數量密切相關。除基站密集交會的區域外, 大部分頂角區域和基陣包絡區域普遍精度較差。

圖6 3類單個基站失效情況下的覆蓋特性及RMSE分布

圖7 中心基站偏移情況下的覆蓋特性及RMSE分布
4.3 子基陣定位
對稱型布站條件下的5基站和6基站構型實際上均由若干3基站的子基陣構成, 分別考慮僅由這2種構型的子基陣定位所具有的性能。如圖8所示, (a)~(b)為直達波定位時參與交會解算的有效基站數分布, (c)~(d)為對應的RMSE分布。由3基站構成的子基陣僅在三角形包絡中心附近區域具有相對較高定位精度, 而在邊緣附近定位性能較差。因此, 從測量海區直達波的覆蓋性要求考慮, 由多個冗余基站形成的完整包絡是重要保證, 而中心基站則為優化交會求解條件及提升定位性能有所貢獻。
5 結束語
針對深海較大范圍海區布站幾何對海上隨機目標水聲定位性能影響分析問題, 提出一種基于多基站時差交會體制的全區域精度仿真分析方法, 初步解決了不同預選布站幾何條件下的精度和覆蓋特性估計問題, 可為測量系統論證設計與應用提供參考。
以4基站、5基站和6基站3種典型布站幾何為例進行仿真分析。分析結果表明, 受會聚區聲信道影響, 直達波與海底一次反射波定位性能有明顯差異, 前者精度相對較高, 而后者覆蓋范圍相對較大。直達波定位陣中心區域精度優于陣邊緣區域, 海底一次反射波定位則在陣中心附近出現一個2~3 km的精度下降區。從4基站到6基站, 直達波定位平均RMSE從23.9 m減小至17.6 m, 海底一次反射波定位平均RMSE從45.3 m減小到39.1 m, 直達波定位RMSE優于30 m的覆蓋率從51.3%提升至99.6%。在處于頂角位置的基站失效或處于中心位置的基站偏移的情況下, RMSE出現非對稱分布, 僅能在密集交會的局部區域獲取相對較高的精度, 不能保證對全海區的覆蓋性。
文中雖提出了一類適用于深海大范圍海區時差定位精度評估的方法, 但僅考慮了簡單聲系統和二維聲信道的情況, 并沒有延伸到三維聲環境、多源信息融合和聲信號處理等問題, 更加精細、具體的模型和方法需要進一步開展研究。此外, 由于此類工況的特殊性, 現階段還沒有海上試驗的結果支撐, 需要結合后續海上試驗結果對提出的方法加以驗證和改進。
[1] 賈云得, 冷樹林, 劉萬春, 等. 四元被動聲敏感陣列定位模型分析和仿真[J]. 兵工學報, 2001, 22(2): 206-209. Jia Yun-de, Leng Shu-lin, Liu Wan-chun, et al. Modeling of Passive Acoustic Sensing with Four-sensor Array for Target Localization[J]. Acta Armamentarii, 2001, 22(2): 206-209.
[2] 金磊磊, 馬艷. 任意四元陣的定位盲區討論及誤差影響[J]. 探測與控制學報, 2015, 37(2): 90-94.Jin Lei-lei, Ma Yan. Discussion on Blind Area and Error Effect of Arbitrary Four-element Array[J]. Journal of Detection & Control, 2015, 37(2): 90-94.
[3] 顧曉輝, 王曉鳴. 用雙直角三角形陣對聲目標定位的研究[J]. 聲學技術, 2003, 22(1): 44-48.Gu Xiao-hui, Wang Xiao-ming. Location of Acoustic Target with Dual Right-triangles Array[J]. Technical Acoustics, 2003, 22(1): 44-48.
[4] 祝龍石, 莊志洪, 張清泰. 利用圓陣實現聲目標的全空域被動定位[J]. 聲學學報, 1999, 24(2): 204-209. Zhu Long-shi, Zhuang Zhi-hong, Zhang Qing-tai. An Omni-directional Passive Locatlization Technology of Acoustic Target with Plane Circular Array[J]. Acta Acustica, 1999, 24(2): 204-209.
[5] 王志剛, 陳韶華, 王維. 分布式基陣聯合定位算法仿真分析[J]. 水下無人系統學報, 2018, 26(5): 433-438. Wang Zhi-gang, Chen Shao-hua, Wang Wei. Simulation Analysis of Joint Localization Algorithm Based on Distributed Arrays[J]. Journal of Unmanned Undersea Systems, 2018, 26(5): 433-438.
[6] 李韋華, 薛飛, 馬錦垠. 時延差雙曲面定位方法在魚雷入水點測量中的應用[J]. 魚雷技術, 2015, 23(6): 420-422. Li Wei-hua, Xue Fei, Ma Jin-yin. Application of Localization Method Based on Time Delay Difference and Hyperboloid to Torpedo Water-entry Point Measurement[J]. Torpedo Technology, 2015, 23(6): 420-422.
[7] Brekhovskikh L M, Lysanov Y P. Fundamentals of Ocean Acoustics[M]. 3rd ed. New York: AIP press, 2003.
[8] 楊坤德, 李輝, 段睿. 深海聲傳播信道和目標被動定位研究現狀[J]. 中國科學院院刊, 2019, 34(3): 314-320.Yang Kun-de, Li Hui, Duan Rui. Research on Acoustic Propagation and Passive Localization in Deep Water[J]. Bulletin of Chinese Academy of Sciences, 2019, 34(3): 314-320.
[9] 孫大軍, 鄭翠娥, 崔宏宇, 等. 水下傳感器網絡定位技術發展現狀及若干前沿問題[J]. 中國科學: 信息科學, 2018, 48(9): 1121-1136. Sun Da-jun, Zheng Cui-e, Cui Hong-yu, et al. Developing Status and Some Cutting-Edge Issues of Underwater Sensor Network Localization Technology[J]. Scientia Sinica: Informationis, 2018, 48(9): 1121-1136.
[10] 陳連榮, 彭朝暉, 南明星. 高斯射線束方法在深海匹配場定位中的應用[J]. 聲學學報, 2013, 38(6): 715-723. Chen Lian-rong, Peng Zhao-hui, Nan Ming-xing. The Application of Gaussian Beam Method in Deep Ocean Matched-Field Localization[J]. Acta Acustica, 2013, 38(6): 715-723.
[11] 吳俊楠, 周士弘, 張巖. 利用深海海底反射聲場特征的水面聲源被動測距[J]. 中國科學: 物理學力學天文學, 2016, 46(9): 76-82. Wu Jun-nan, Zhou Shi-hong, Zhang Yan. Passive Ranging of Surface Source Using Bottom Bounced Sound in Deep Water[J]. Scientia Sinica: Physica, Mechanica & Astronomica, 2016, 46(9): 76-82.
[12] 張旭. 深海分層介質中的無源聲定位時差交會特性[J]. 科學通報, 2019, 64(24): 2523-2536.Zhang Xu. Time Difference Intersection Characteristics of Passive Underwater Acoustic Localization in the Stratified Deep Sea[J]. Chinese Science Bulletin, 2019, 64(24): 2523-2536.
[13] Locarnini R A, Mishonov A V, Antonov J I, et al. World Ocean Atlas 2009 Volume 1: Temperature[R]. Washington, D.C.: S. Levitus, Ed., NOAA Atlas NESDIS 68, U.S. Government Printing Office, 2010.
[14] Antonov J I, Seidov D, Boyer T P, et al. World Ocean Atlas 2009, 2(Salinity)[R]. NOAA Atlas NESDIS 69. Washington D C: Government Printing Office, 2010.
[15] Porter M B, Bucher H P. Gaussian Beam Tracing for Computing Ocean Acoustic Fields[J]. J. Acoust. Soc. Am, 1987, 82: 1349-1359.
[16] 劉利生, 吳斌, 吳正容, 等. 外彈道測量精度分析與評定[M]. 北京: 國防工業出版社, 2010: 123-188.
[17] 張旭, 孫翱, 韓旭, 等. 水下垂向運動目標的海底多基站聲定位方法及精度分析[J]. 聲學學報, 2019, 44(2): 155-169. Zhang Xu, Sun Ao, Han Xu, et al. Acoustic Localization Scheme and Accuracy Analysis for Underwater Vertical Motion Target Using Multi-stations in the Seabed[J]. Acta Acustica, 2019, 44(2): 155-169.
Effects of Observation Geometry on Accuracy Distribution Characteristic of TDOA Localization System in Deep Sea
ZHANG Xu1, LIZhi-sheng1, QIU Ren-gui2, DONG Nan1
(1. 91550thUnit, the People’s Liberation Army of China, Dalian 116023, China; 2. 91650thUnit, the People’s Liberation Army of China, Guangzhou 510320, China)
To stably localize an acoustic target in a large area of deep sea, the accuracy and coverage characteristic are required to be evaluated under pre-selected observation geometry condition in the measurement system design. Aiming at this problem, a simulation method was presented for analyzing the distributional characteristics of accuracy in underwater acoustic localizationwith multiple base stations by time difference of arrival(TDOA). The climatological environment in the center of Northern Pacific was selected as background, and the sound field was calculated by BELLHOP Gaussian ray model. Main errors were randomly superimposed by Monte-Carlo method and propagated to finally estimated locations, such that the distribution of root mean square error(RMSE) was established by grid calculation with large samples under typical geometry condition of 4-receiver, 5-receiver or 6-receiver array. The results indicated that the localization performance using direct waves was clearly different from that using first-seabed-reflected waves, and the former was more accurate while the later was better in coverage. For the localization with direct waves, the accuracy was better in the central area of array than that in the marginal one. For the localization with first-seabed-reflected waves, the accuracy became worse in the area several kilometers around the center of array. In another case, the RMSE showed an asymmetric distribution when one corner station was invalid or the central station shifted, the relatively high accuracy area was confined to the active station number, but the full measurement area failed to be covered. Compared with the existing researches, this research provides an applicable way to evaluate and analyze the influence of observation geometry on accuracy distribution and coverage characteristic.
underwater acoustic localization; accuracy distribution; observation geometry; multiple base stations; coverage characteristic; deep sea
TB566; TJ630.33
A
2096-3920(2020)02-0139-10
10.11993/j.issn.2096-3920.2020.02.004
2019-06-17;
2019-07-08.
國家自然科學基金(61701504, 61971424).
張 旭(1982-), 男, 博士, 工程師, 主要從事水下測量技術、海洋信息應用技術研究.
張旭, 李智生, 邱仁貴, 等. 布站幾何對深海時差定位精度分布特性的影響[J]. 水下無人系統學報, 2020, 28(2): 139-148.
(責任編輯: 許 妍)
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52