中高軌衛(wèi)星海洋成像圖像幾何定位精度提升方法
2020-05-15 00:00:14劉曉磊董小萌潘忠石張過宋鵬飛
航天器工程 2020年2期
劉曉磊 董小萌 潘忠石 張過 宋鵬飛
(1 北京空間飛行器總體設(shè)計部,北京 100094)(2 武漢大學(xué) 測繪遙感信息工程國家重點實驗室,武漢 430079)
遙感衛(wèi)星發(fā)射過程中的應(yīng)力釋放及衛(wèi)星在軌運行的物理環(huán)境變化,均會引起幾何定位參數(shù)(載荷安裝、CCD焦面排列及鏡頭畸變等參數(shù))的改變;另外,衛(wèi)星的姿態(tài)軌道測量系統(tǒng)等也往往存在系統(tǒng)性偏差,這些均會降低衛(wèi)星幾何定位精度。目前,采用在軌幾何檢校技術(shù)是提升遙感衛(wèi)星圖像幾何定位精度的一種有效手段,如國外的斯波特-5(SPOT-5)、“艾科諾斯”(IKONOS)、“地球之眼”(GeoEye)、世界觀測-1(WorldView-1)和WorldView-2等,采用在軌幾何檢校后,無控制點定位精度能實現(xiàn)10 m以內(nèi)[1-8]。我國遙感衛(wèi)星也采用在軌幾何檢校技術(shù),典型方法包括偏移矩陣[9]、姿態(tài)系統(tǒng)誤差檢校[10-11]等,目前我國資源三號衛(wèi)星可實現(xiàn)無控制點定位精度優(yōu)于25 m[12-13]。上述國內(nèi)外衛(wèi)星主要是低軌遙感衛(wèi)星,綜合來講,可實現(xiàn)較高的定位精度。然而,隨著中高軌遙感衛(wèi)星的不斷發(fā)展,特別是海洋成像時,在無控制點的情況下提升衛(wèi)星圖像幾何定位精度具有很強的應(yīng)用需求,且國內(nèi)外目前尚未見中高軌衛(wèi)星海洋成像時圖像幾何定位提升技術(shù)研究的相關(guān)報道,這是一個值得研究的問題。
本文提出一種針對中高軌衛(wèi)星海洋成像的無控點定位精度提升方法,利用中高軌衛(wèi)星成像范圍大,配合姿態(tài)機動,在短時間內(nèi)尋找有特征點的區(qū)域,通過衛(wèi)星圖像與高精度控制圖像進行匹配,尋找控制點,求解偏置矩陣,并將該區(qū)域的偏置矩陣補償?shù)胶Q蟮貐^(qū),達到提升圖像定位精度的目的。最后,通過成像仿真及檢校仿真試驗,利用快速機動獲取的有控制點的檢校數(shù)據(jù)對無控制點數(shù)據(jù)進行檢校,證明了該方法用于中高軌衛(wèi)星海洋成像圖像幾何定位精度提升的可行性。
1 海洋成像無控制點定位精度提升方法
1.1 總體思路
中高軌衛(wèi)星對海洋成像時,很難在影像上找到特征控制點,因此中高軌衛(wèi)星提升幾何定位精度需要利用在軌檢校技術(shù)將成像系統(tǒng)誤差消除。相對于低軌衛(wèi)星來講,中高軌衛(wèi)星成像范圍大,配合姿態(tài)快速機動,能夠在短時間內(nèi)尋找到有特征點的區(qū)域,而衛(wèi)星在短時間內(nèi)數(shù)次成像中系統(tǒng)誤差較為穩(wěn)定,則可以利用有特征點的影像求解偏置矩陣,并應(yīng)用到海洋影像中,以提升海洋成像無控制點定位精度。本文方法實現(xiàn)過程見圖1,總體思路如下。
(1)衛(wèi)星下傳的海洋影像(待補償影像)周圍沒有特征區(qū)域,衛(wèi)星執(zhí)行姿態(tài)機動命令,直到影像上有控制區(qū)域(一般要求至少有1個明顯控制點,如海島、海岸線等)為止,此時的影像叫做檢校影像。
(2)利用檢校影像的姿態(tài)、軌道、成像時間等輔助信息,配合高精度控制數(shù)據(jù),對控制數(shù)據(jù)進行重采樣,生成一幅與檢校影像相同大小的影像(簡稱模擬影像)。方法詳見1.2節(jié)。
(3)針對檢校影像與模擬影像,采用滿足亞像素級的高精度配準算法進行列等間隔配準,在檢校影像上獲取控制點。方法詳見1.3節(jié)。
(4)利用配準獲取的控制點解求偏置矩陣。方法詳見1.4節(jié)。
(5)將得到的偏置矩陣Ru應(yīng)用到海洋影像(待補償影像)中,補償載荷安裝誤差及姿態(tài)、軌道系統(tǒng)誤差,提高中高軌衛(wèi)星海洋圖像幾何定位精度。方法詳見1.5節(jié)。
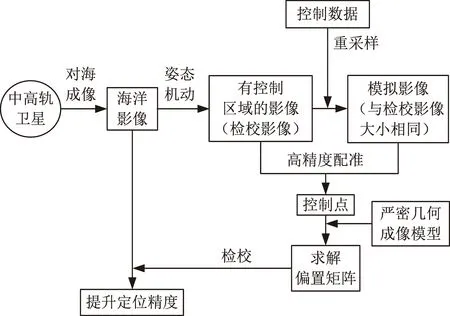
圖1 方法實現(xiàn)過程Fig.1 Method process
1.2 模擬影像生成
中高軌衛(wèi)星采用姿態(tài)機動方法尋找周圍有控制區(qū)域的地方進行成像,這就要求在能夠找到控制點的區(qū)域(如海島)都要有控制數(shù)據(jù)。鑒于這種應(yīng)用,本文采用全球15 m左右精度的陸地衛(wèi)星-6(Landsat-6)的增強型專題繪圖儀(ETM)數(shù)據(jù)及全球6 m左右精度的雷達測繪高精度數(shù)字高程模型(SRTM-DEM)/“土”(Terra)衛(wèi)星先進熱輻射與反射輻射計(ASTER)的數(shù)字高程模型(DEM)數(shù)據(jù)作為控制數(shù)據(jù),支撐中高軌衛(wèi)星進行在軌幾何檢校。
生成模擬影像時,針對檢校與高精度數(shù)字正射影像圖(DOM)分辨率差異,利用檢校影像的輔助姿態(tài)、軌道、影像行掃描時間文件、高精度DEM影像,構(gòu)建嚴密幾何成像模型,對高精度DOM影像進行重采樣,從而生成一幅與檢校影像相同大小的模擬影像,具體步驟如下。
(1)利用實驗室測量的內(nèi)方位元素和姿態(tài)與軌道數(shù)據(jù),結(jié)合高精度DEM影像,構(gòu)建嚴密幾何成像模型。
(2)對模擬影像上像素點(行列坐標為(s,l),利用嚴密幾何模型建立地面坐標點在WGS84坐標系下的坐標與模擬影像像素點坐標的對應(yīng)關(guān)系(即(X,Y,Z)WGS84=T(s,l)),通過地面點在WGS84坐標系下的坐標(X,Y,Z)WGS84到(Llat,Llon,h)(緯度,經(jīng)度,高程),再到DOM上的坐標點(E,N)refDOM(E和N分別為DOM上的行坐標點和列坐標點)的變換過程,從WGS84坐標系變換到高精度DOM坐標系下。
(4)重復(fù)步驟(1)~(3),直至生成一幅與檢校影像相同大小的模擬影像。
1.3 獲取檢校影像控制點
利用檢校影像與模擬影像,采用滿足亞像素級的高精度配準算法進行列等間隔配準,獲取控制點,步驟如下。
(1)根據(jù)檢校影像的CCD陣列大小,確定配準列間隔。假定檢校影像大小為ws·hs,(ws和hs分別為檢校影像的列數(shù)和行數(shù))取列間隔n,則配準將在檢校影像的i·n列上進行(i=1,2,3,…,且i·n≤ws)。
(2)針對檢校影像的i個配準列i·n,對該列下的hs個影像點逐一與模擬影像配準,保留滿足配準精度的所有點;對檢校影像選定的所有配準列進行此操作。
(4)利用1.2節(jié)步驟(1)中構(gòu)建的模擬影像嚴密幾何成像模型,計算得到各配準點對模擬影像像點的地面坐標(Llat,Llon,h),從而得到檢校影像控制點地面坐標(s′,l′,Llat,Llon,h),(s′,l′)與(s,l)為配準點對。
1.4 求解偏置矩陣
利用配準獲取的控制點求解偏置矩陣,偏置矩陣Ru的求解方法一般按攝影測量中后方交會方法進行,見式(1)。
(1)

嚴密幾何成像模型可變換為
(2)
令
(3)

展開有
(4)
式中:fx,fy為檢校后的2個方向偏置角與檢校前的差值。
列出誤差方程為
V=BX-l
(5)
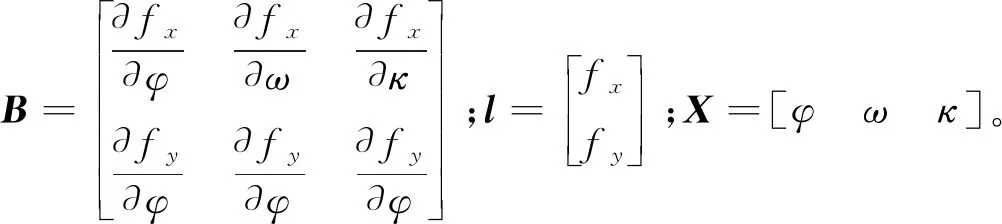
利用最小二乘原理X=(BTB)-1BTl,可計算出偏置矩陣3個角元素φ,ω,κ,從而求解出偏置矩陣Ru。
1.5 檢校補償
首先,構(gòu)建中高軌衛(wèi)星外方位元素檢校模型。影響定位精度的外方位元素主要包括軌道測量誤差、姿態(tài)測量誤差及載荷安裝誤差。依據(jù)對幾何定位精度的影響特性,載荷安裝誤差可以等效于姿態(tài)測量誤差。軌道測量誤差雖然對幾何定位精度的影響特性與姿態(tài)誤差有所差異,但是兩者可以依據(jù)一定的幾何關(guān)系進行等效處理。如圖2所示,S表示當(dāng)前時刻衛(wèi)星成像的真實位置,S′為衛(wèi)星測量位置,P和P′分別為真實地面點位置和地面點測量位置,DX為衛(wèi)星軌道位置偏移誤差,則易看出,軌道誤差DX可以等效成姿態(tài)誤差dθ(θ真實光線與測量光線間的夾角),兩者對幾何定位精度影響一致。以軌道測量誤差為例,其對幾何定位精度的影響表現(xiàn)為平移誤差,影響特性雖與姿態(tài)誤差有所差異,但是兩者可以依據(jù)一定的幾何關(guān)系進行等效處理,如圖3所示。
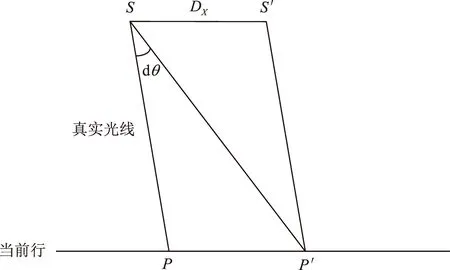
圖2 線元素和角元素等效關(guān)系Fig.2 Equivalent relationship between line and angle elements
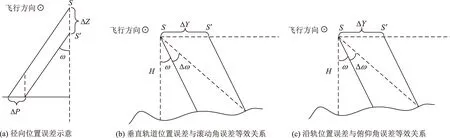
圖3 線平移誤差與角誤差等效關(guān)系
在圖3(a)中,ΔZ為軌道徑向誤差,ω0為線陣CCD成像光線的滾動角(包括衛(wèi)星側(cè)擺角及CCD探元視場角),則引起的徑向定位誤差ΔP為
ΔP=ΔZtanω
(6)
衛(wèi)星無側(cè)擺正視成像時,當(dāng)相機視場較小且定軌精度較高時,ΔZ引起的幾何定位誤差可以忽略;當(dāng)衛(wèi)星大側(cè)擺成像時,式(6)對ω求偏導(dǎo)有
d(ΔP)=ΔZsec2ωdω
(7)
根據(jù)式(7),考慮當(dāng)ΔZ<5 cm,ω≤32°,dω≤5.6°時,ΔZ對不同視場角探元引起的幾何定位誤差的差異小于0.06 m,即在大側(cè)擺成像條件下,ΔZ引起的誤差為平移誤差,可等效為相應(yīng)方向軌道誤差。
在圖3(b)中,假設(shè)衛(wèi)星成像視場角為ω(不同探元ω不同),滾動角誤差為Δω,則引起的垂直軌道定位誤差ΔY為
ΔY=Htanω-Htan(ω+Δω)
(8)
式中:H為軌道高度。
對ω微分有
d(ΔY)=H[tan2ω-tan2(ω+Δω)]dω
(9)
在最壞情況下,滾動角誤差對各個不同探元造成的幾何定位誤差的差異不超過0.5個像素,可以認為滾動角誤差對各探元影響一致,從而圖3(b)中滾動角誤差與垂直軌道方向軌道誤差等效。因此,軌道誤差可以等效為姿態(tài)誤差。圖3(c)的情況與圖3(b)情況類似。

(10)

有了幾何檢校模型,利用第1.4節(jié)得到的偏置矩陣Ru,應(yīng)用到海洋影像(待補償影像)中,補償載荷安裝誤差及姿態(tài)、軌道系統(tǒng)誤差,即可提高中高軌衛(wèi)星海洋成像圖像幾何定位精度。
2 仿真試驗
為了驗證本文方法的可行性,進行了相應(yīng)的仿真試驗,試驗的全部流程與上述方法保持一致。由于最終的檢校精度定量評價需要有控制點,本文仿真試驗中沒有采用海洋區(qū)域,而是將待補償圖像設(shè)在陸地,以便定量評估,但方法對海洋同樣適用。
仿真試驗的輸入數(shù)據(jù)包括:①含誤差的軌道數(shù)據(jù);②含誤差的姿態(tài)數(shù)據(jù);③WGS84與J2000坐標轉(zhuǎn)換的轉(zhuǎn)換矩陣文件;④成像時間數(shù)據(jù);⑤模擬影像。利用仿真軟件,仿真了2套數(shù)據(jù),分別位于河南嵩山檢校場和太原區(qū)域。利用河南嵩山檢校場數(shù)據(jù)進行在軌幾何檢校,將檢校參數(shù)補償?shù)教瓍^(qū)域,對太原區(qū)域的定位精度進行評估,檢驗提升方法的有效性。誤差仿真參數(shù)設(shè)置如表1所示。
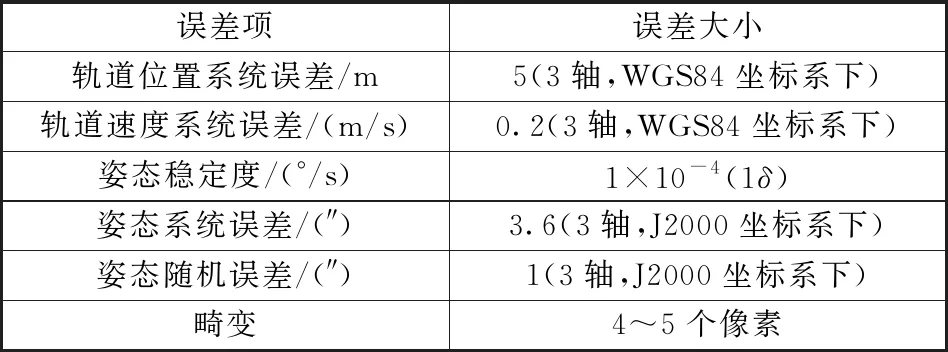
表1 誤差仿真參數(shù)設(shè)置
采用本文方法,得到偏置補償矩陣,利用偏置補償矩陣對嵩山場景進行檢校,得到檢校前后的定位精度,結(jié)果如表2所示。可見,在進行外方位元素檢校前,直接利用星上下傳的原始數(shù)據(jù)的無控定位精度為137.1個像素,直接定位精度比較差;在通過本文方法進行偏置矩陣求解之后,將得到的偏置矩陣反代入嵩山場景中,得到平面精度為1.6個像素,自我補償精度比較高,剩下的1個多像素的誤差來源于影像內(nèi)部精度的不一致。
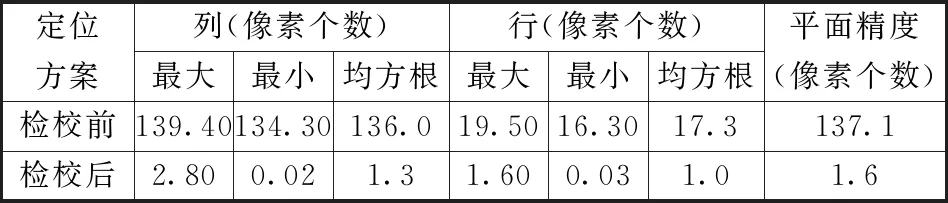
表2 嵩山場景檢校前后定位精度統(tǒng)計
在得到偏置補償矩陣后,將其用于太原區(qū)域的補償,通過補償精度來評價本文方法的可行性。表3為太原場景補償前后的定位精度,偏置補償前的直接定位精度為118.3個像素,經(jīng)過偏置補償后,定位精度提高到37.8個像素。補償后場景和檢校后場景的定位精度有差異,是因為檢校后場景和補償后場景所在的姿態(tài)軌道隨機誤差不一樣,且偏置補償?shù)膬H僅為衛(wèi)星的穩(wěn)定安裝部分。
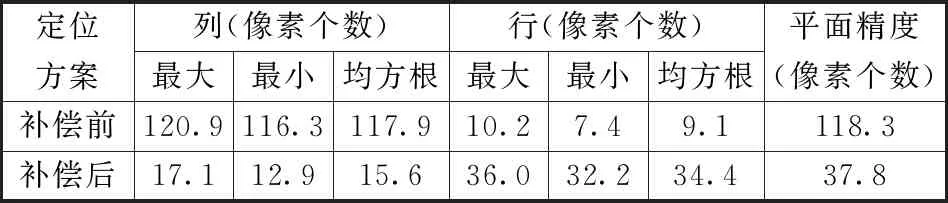
表3 太原場景補償前后定位精度統(tǒng)計
通過仿真結(jié)果可以看出:利用檢校后場景的偏置矩陣補償實際場景(太原場景),可以提升無控制點的定位精度。在仿真試驗中,實際場景的無控制點定位精度從118.3個像素提高到37.8個像素,定位精度顯著提升,證明了中高軌衛(wèi)星海洋成像時,可利用中高軌可視范圍寬的特點,配合姿態(tài)機動獲取臨近有控制點數(shù)據(jù),并進行海洋區(qū)域圖像檢校,從而提升中高軌衛(wèi)星海洋成像無控制點幾何定位精度。
3 結(jié)束語
本文基于中高軌衛(wèi)星對海洋成像時無控制點情況下定位精度提升需求,提出了一種利用中高軌衛(wèi)星成像范圍大,配合姿態(tài)機動,在短時間內(nèi)尋找有特征點的區(qū)域成像并求解偏置矩陣,應(yīng)用到海洋區(qū)域的檢校方法。在尋找控制點時,本文基于全球高精度控制數(shù)據(jù),配合機動成像的姿態(tài)軌道輔助數(shù)據(jù),重采樣控制數(shù)據(jù)形成模擬影像,并通過模擬影像與檢校影像高精度配準,尋找檢校影像高精度控制點,為求解相對準確的偏置矩陣提供基礎(chǔ)。經(jīng)過仿真驗證,本文方法對海洋成像的無控制點定位精度可提升3倍,可應(yīng)用于中髙軌衛(wèi)星對海面成像任務(wù)時對應(yīng)的圖像處理,支持生成高精度幾何定位圖像數(shù)據(jù)。