多方位角觀測(cè)星載SAR技術(shù)研究
2020-05-18 05:27:12王鵬波曾虹程門志榮李春升
雷達(dá)學(xué)報(bào) 2020年2期
陳 杰 楊 威 王鵬波 曾虹程 門志榮 李春升
(北京航空航天大學(xué)電子信息工程學(xué)院 北京 100191)
1 引言
合成孔徑雷達(dá)(Synthetic Aperture Radar,SAR)衛(wèi)星系統(tǒng)技術(shù)近些年發(fā)展迅速,衛(wèi)星平臺(tái)控制與測(cè)量能力、有效載荷信號(hào)獲取能力、天線波束掃描能力、地面系統(tǒng)數(shù)據(jù)處理能力都顯著提升。如何充分利用和發(fā)揮上述能力,發(fā)展新體制和新模式,提升任務(wù)快速響應(yīng)水平和雷達(dá)圖像質(zhì)量,全面獲取目標(biāo)的散射信息、幾何信息和運(yùn)動(dòng)信息,是未來研究和發(fā)展的重要方向。
傳統(tǒng)星載SAR工作模式主要包括條帶模式、掃描模式、聚束模式[1]。隨著星載SAR技術(shù)發(fā)展,為提升對(duì)地觀測(cè)面積和空間分辨能力,更為先進(jìn)的工作體制和成像模式相繼提出并實(shí)現(xiàn),比如方位多通道接收體制[2]、滑動(dòng)聚束模式[3]。在此基礎(chǔ)上,德宇航研究人員利用TerraSAR-X衛(wèi)星開展了大量在軌試驗(yàn),創(chuàng)新實(shí)現(xiàn)了更多種新模式,包括TOPS模式[4]、逆TOPS模式[5]、Bi-Di模式[6-8]、Staring模式[9,10]、以及Wrap-Staring[11]模式等,實(shí)現(xiàn)了空間分辨率、觀測(cè)覆蓋面積以及輻射分辨率的顯著提升。隨著不同領(lǐng)域的應(yīng)用需求增加,拓展圖像產(chǎn)品樣式、提升產(chǎn)品服務(wù)水平成為未來星載SAR技術(shù)發(fā)展的重要目標(biāo),迫切需要?jiǎng)?chuàng)新體制,牽引出新的成像模式。
20世紀(jì)90年代,Sandia實(shí)驗(yàn)室在美國國防高等研究計(jì)劃署的支持下,基于X波段機(jī)載SAR系統(tǒng)開展了MSTAR計(jì)劃試驗(yàn)[12],得到了大量目標(biāo)不同觀測(cè)角度下的SAR圖像,驗(yàn)證了雷達(dá)目標(biāo)散射特性隨觀測(cè)角度顯著變化這一結(jié)論。隨后,美國空軍研究實(shí)驗(yàn)室研制了機(jī)載圓跡SAR系統(tǒng),通過機(jī)載平臺(tái)圍繞觀測(cè)區(qū)域作圓周飛行獲取目標(biāo)全方位三維散射信息,得到了GOTCHA數(shù)據(jù)集,并利用該數(shù)據(jù)集實(shí)現(xiàn)目標(biāo)三維成像[13,14]。上述研究成果表明,多方位角觀測(cè)可獲取更多的目標(biāo)信息。因此,如何在衛(wèi)星平臺(tái)上實(shí)現(xiàn)多方位角觀測(cè)成為星載SAR技術(shù)研究熱點(diǎn)之一。
星載SAR多方位角觀測(cè)利用衛(wèi)星平臺(tái)機(jī)動(dòng)或者天線波束掃描能力,可從不同方位角度對(duì)目標(biāo)區(qū)域進(jìn)行靈活的成像觀測(cè),具備在一軌過境期間內(nèi)對(duì)不同區(qū)域觀測(cè)或者同一區(qū)域多次觀測(cè)的能力,可實(shí)現(xiàn)高分辨率寬覆蓋和靈活的對(duì)地觀測(cè),信息獲取效率的顯著提升。多方位角觀測(cè)星載SAR技術(shù)的研究處于初始階段,但在圖像質(zhì)量提升、動(dòng)目標(biāo)檢測(cè)、三維幾何信息提取等方面已經(jīng)取得了一定的研究成果[15-20],受到國內(nèi)外研究學(xué)者的重視[21],說明了多方位角觀測(cè)星載SAR技術(shù)具有顯著的應(yīng)用前景。
本文針對(duì)多方位角觀測(cè)星載SAR技術(shù)發(fā)展現(xiàn)狀和趨勢(shì)進(jìn)行研究。第2節(jié)對(duì)國內(nèi)外先進(jìn)SAR衛(wèi)星性能和特點(diǎn)進(jìn)行了總結(jié),對(duì)工作能力進(jìn)行了分析。第3節(jié)重點(diǎn)對(duì)基于多方位角觀測(cè)的成像新模式進(jìn)行了綜述。在此基礎(chǔ)上,第4節(jié)闡述了多方位角觀測(cè)星載SAR數(shù)據(jù)處理方法,并展示了處理結(jié)果。第5節(jié)對(duì)多方位角觀測(cè)星載SAR技術(shù)發(fā)展進(jìn)行總結(jié),并對(duì)未來發(fā)展進(jìn)行了展望。
2 典型SAR衛(wèi)星簡介
本章總結(jié)了國內(nèi)外具有多方位角觀測(cè)能力的典型SAR衛(wèi)星,對(duì)其觀測(cè)能力進(jìn)行了綜述,并重點(diǎn)解析其最具特色的工作模式。具體包括:以色列TecSAR衛(wèi)星,德國TerraSAR-NG衛(wèi)星、SAR-Lupe衛(wèi)星,美國Lacrosse衛(wèi)星、FIA衛(wèi)星、Capella衛(wèi)星和SR衛(wèi)星。
2.1 TecSAR衛(wèi)星
TecSAR衛(wèi)星是以色列研制的雷達(dá)成像偵察衛(wèi)星(SAR Technology demonstration satellite,TecSAR),也稱為“北極星”衛(wèi)星,工作在大傾斜角軌道,主要用于保證以色列對(duì)中東地區(qū)態(tài)勢(shì)信息掌控的能力。TecSAR衛(wèi)星有效載荷是高分辨率X波段合成孔徑雷達(dá)XSAR,其前身是機(jī)載型X波段多模式雷達(dá),經(jīng)過多次機(jī)載試驗(yàn)驗(yàn)證后,改良搭載在衛(wèi)星平臺(tái)上。
TecSAR衛(wèi)星最大的特點(diǎn)是靈巧、質(zhì)量輕、性能好、工作模式靈活,TecSAR重量約300 kg,有效載荷只有100 kg,最優(yōu)分辨率可達(dá)0.7 m,具有全極化的工作模式。TecSAR衛(wèi)星具有多種的工作模式,包括掃描模式、條帶模式和聚束模式等[22-24]。
此外,TecSAR衛(wèi)星采用的是拋物面天線,通過電掃和機(jī)械掃描可實(shí)現(xiàn)天線波束的二維靈活掃描,具備一種先進(jìn)的工作模式,即鑲嵌模式(mosaic),如圖1所示。因此,TecSAR衛(wèi)星可多方位角對(duì)地觀測(cè),但目前從公開報(bào)道的資料看,TecSAR衛(wèi)星主要利用二維波束掃描能力,通過拼接提升覆蓋性能[25]。
2.2 TerraSAR-NG衛(wèi)星
在TerraSAR-X/TanDem-X姊妹星成功發(fā)射和應(yīng)用的基礎(chǔ)上,歐空局和德宇航正在研制下一代高分辨率SAR衛(wèi)星TerraSAR-NG,該衛(wèi)星與TerraSAR-X衛(wèi)星具有相同的軌道,并將和TerraSAR-X/Tan-Dem-X、以及西班牙的PAZ衛(wèi)星一起構(gòu)建星座,稱作WorldSAR星座,其結(jié)構(gòu)圖如圖2所示。

圖1 鑲嵌模式工作示意圖Fig.1 Illustration of mosaic mode

圖2 WorldSAR星座工作示意圖Fig.2 Illustration of WorldSAR constellation
和第1代TerraSAR-X相比,TerraSAR-NG衛(wèi)星對(duì)地觀測(cè)能力更強(qiáng),并引入了多通道滑動(dòng)聚束模式和多通道TOPS模式,其中多通道滑動(dòng)聚束模式可實(shí)現(xiàn)0.25 m分辨率、5 km 5 km的幅寬成像;多通道TOPS模式可實(shí)現(xiàn)30 m分辨率、400 km的幅寬成像[26-31]。
TerraSAR-NG衛(wèi)星具有更強(qiáng)的波束掃描能力,據(jù)其成像幅寬和軌道高度可以推算其方位向波束掃描能力較第一代TerraSAR-X衛(wèi)星相比提高了1倍左右[32,33],因此,TerraSAR-NG衛(wèi)星具有一定多方位角成像觀測(cè)能力。
2.3 SAR-lupe衛(wèi)星
SAR-lupe衛(wèi)星是德國軍用雷達(dá)偵察衛(wèi)星[34,35],從2006年12月至2008年7月,先后發(fā)射了5顆同樣的雷達(dá)衛(wèi)星,分布在3個(gè)不同的軌道上,構(gòu)成星座(如圖3所示),最長10小時(shí)內(nèi)可對(duì)可視區(qū)域內(nèi)任何目標(biāo)進(jìn)行成像偵察,極大地提升了歐洲天基對(duì)地成像偵察能力。
SAR-lupe衛(wèi)星重約770 kg,采用X波段的有效載荷,多采用條帶和聚束兩種成像模式,可獲取多種分辨尺度的SAR遙感圖像。其中,需要特別關(guān)注的是SAR-lupe衛(wèi)星具有較強(qiáng)的平臺(tái)機(jī)動(dòng)和控制能力,不同于TerraSAR-X衛(wèi)星,SAR-lupe衛(wèi)星可以通過平臺(tái)機(jī)動(dòng)來調(diào)整波束指向,實(shí)現(xiàn)高分辨率聚束等模式,獲取0.5 m分辨率、5.5 km×5.5 km大小觀測(cè)區(qū)域的圖像。因此,通過平臺(tái)的機(jī)動(dòng)能力,SAR-lupe衛(wèi)星也具備對(duì)地多方位角觀測(cè)能力。
2.4 Lacrosse衛(wèi)星和FIA衛(wèi)星
長曲棍球衛(wèi)星(Lacrosse)[36]和未來成像架構(gòu)(Future Imagery Architecture,FIA)[37]衛(wèi)星是美國在軌的軍用成像偵察衛(wèi)星。其中Lacrosse衛(wèi)星從1988年12月發(fā)射第1顆衛(wèi)星至今已經(jīng)先后發(fā)射了5顆長曲棍球衛(wèi)星,Lacrosse-1,Lacrosse-2,Lacrosse-3已經(jīng)退役,Lacrosse-4和Lacrosse-5仍在軌工作。Lacrosse系列衛(wèi)星重約12~16 t,軌道傾角為57°或68°,工作在L波段和X波段,具有水平和垂直兩種極化方式,并首次實(shí)現(xiàn)了0.3 m的成像分辨率,代表了星載SAR衛(wèi)星的領(lǐng)先水平。隨著Lacrosse系列部分衛(wèi)星退役,美國從2010年先后發(fā)射了4顆FIA衛(wèi)星,并將FIA衛(wèi)星的軌道高度調(diào)高,進(jìn)一步提升了對(duì)地觀測(cè)的覆蓋能力。
Lacrosse系列衛(wèi)星和FIA系列衛(wèi)星具有很強(qiáng)的機(jī)動(dòng)能力,在較短時(shí)間內(nèi)能快速機(jī)動(dòng)從而實(shí)現(xiàn)波束二維靈活掃描。因此,可以推測(cè),Lacrosse和FIA衛(wèi)星具備較強(qiáng)的多方位角觀測(cè)能力,工作模式非常靈活。
2.5 Capella衛(wèi)星
Capella衛(wèi)星是美國商用系列衛(wèi)星,共準(zhǔn)備發(fā)射36顆,建成后36顆衛(wèi)星將位于12條不同的軌道,SAR成像重訪時(shí)間不大于1 h,INSAR成像重訪時(shí)間不大于10 h,如圖4所示。
Capella衛(wèi)星軌道高度介于485~525 km,工作于X波段單極化模式,采用極地太陽同步軌道,傾角約為90°,軌道周期90 min,具備多種成像模式,包括聚束模式、滑動(dòng)聚束模式、條帶模式等。其中,值得注意的是,為了提升聚束模式圖像的輻射分辨率和條帶模式的覆蓋性能,Capella衛(wèi)星利用靈活的波束掃描能力,分別實(shí)現(xiàn)了多方位角觀測(cè)聚束模式和多方位角觀測(cè)條帶模式[38]。此外,Capella衛(wèi)星還具有任務(wù)實(shí)時(shí)響應(yīng)能力,綜上分析,Capella衛(wèi)星具有較強(qiáng)的多方位角觀測(cè)能力。
2.6 Space Radar衛(wèi)星
太空雷達(dá)(Space Radar,SR)[39,40]衛(wèi)星是美國軍方有意向開展的一個(gè)項(xiàng)目,具備0.1 m超高分辨率成像、地面動(dòng)目標(biāo)指示(Ground Moving Target Indication,GMTI)、數(shù)字地形測(cè)繪(Digital Terrain Elevation Data,DTED)、海洋監(jiān)視、反導(dǎo)以及戰(zhàn)場(chǎng)實(shí)時(shí)調(diào)度和接收的能力。不同于經(jīng)典SAR衛(wèi)星多用于戰(zhàn)略偵察,SR衛(wèi)星還具備很強(qiáng)的戰(zhàn)役戰(zhàn)術(shù)信息支持能力,可直接提供作戰(zhàn)信息保障。SR衛(wèi)星處理除了具備超高分辨率成像的能力,其相控陣天線還具有超強(qiáng)的波束掃描能力,可實(shí)現(xiàn)方位向正負(fù)45°掃描,具備很強(qiáng)的多方位角觀測(cè)能力。

圖3 SAR-lupe衛(wèi)星星座Fig.3 Illustration of SAR-lupe constellation
圖4 Capella衛(wèi)星星座構(gòu)成示意圖Fig.4 Illustration of Capella constellation
SR衛(wèi)星計(jì)劃因?yàn)槌杀镜脑蛞呀?jīng)停止,但其提出的工作方式和支持戰(zhàn)術(shù)應(yīng)用的想法對(duì)SAR衛(wèi)星技術(shù)的發(fā)展具有重要的借鑒意義。
3 多方位角觀測(cè)成像模式
未來星載SAR系統(tǒng)對(duì)分辨率、覆蓋性能、靈活應(yīng)用等均提出了更高的要求[41]。傳統(tǒng)星載SAR系統(tǒng)工作于正側(cè)視,雷達(dá)系統(tǒng)的信息獲取能力受限;斜視多方位角觀測(cè)可大幅增加雷達(dá)系統(tǒng)對(duì)地面目標(biāo)的觀測(cè)時(shí)間,顯著提升星載SAR對(duì)地探測(cè)性能。
前面分析可知,國外部分SAR衛(wèi)星具備多方位角度觀測(cè)能力,但根據(jù)其方位觀測(cè)角范圍不同,所采用的工作體制也不同。隨著方位觀測(cè)斜視角度變大,回波信號(hào)的距離徙動(dòng)量大幅增加,以TerraSAR-X衛(wèi)星參數(shù)為例開展距離徙動(dòng)分析,每條線段表示一個(gè)目標(biāo)點(diǎn)的斜距歷程,相鄰目標(biāo)點(diǎn)間隔2.5 km,如圖5所示。可以看到,正側(cè)視狀態(tài)下實(shí)現(xiàn)0.25 m分辨率,5 km方位幅寬所引起的斜距徙動(dòng)為2.9 km,現(xiàn)有固定脈沖重復(fù)周期體制可以有效地接收回波;但在斜視狀態(tài)下,如在-23.5°~-17.3°斜視角范圍內(nèi)完成同樣分辨率和幅寬的觀測(cè)所引起的距離徙動(dòng)將達(dá)到35.0 km。此時(shí),若采用傳統(tǒng)固定脈沖重復(fù)周期工作體制,距離徙動(dòng)量的增加將增大距離延遲時(shí)間在回波窗中占比(如圖6所示),進(jìn)而導(dǎo)致雷達(dá)系統(tǒng)的有效測(cè)繪帶寬度大幅降低,甚至造成回波信號(hào)溢出接收窗,無法有效接收回波信號(hào)。因此,為實(shí)現(xiàn)在不同斜視角條件下對(duì)目標(biāo)區(qū)域的多方位角觀測(cè),首先需要采用新的工作體制。
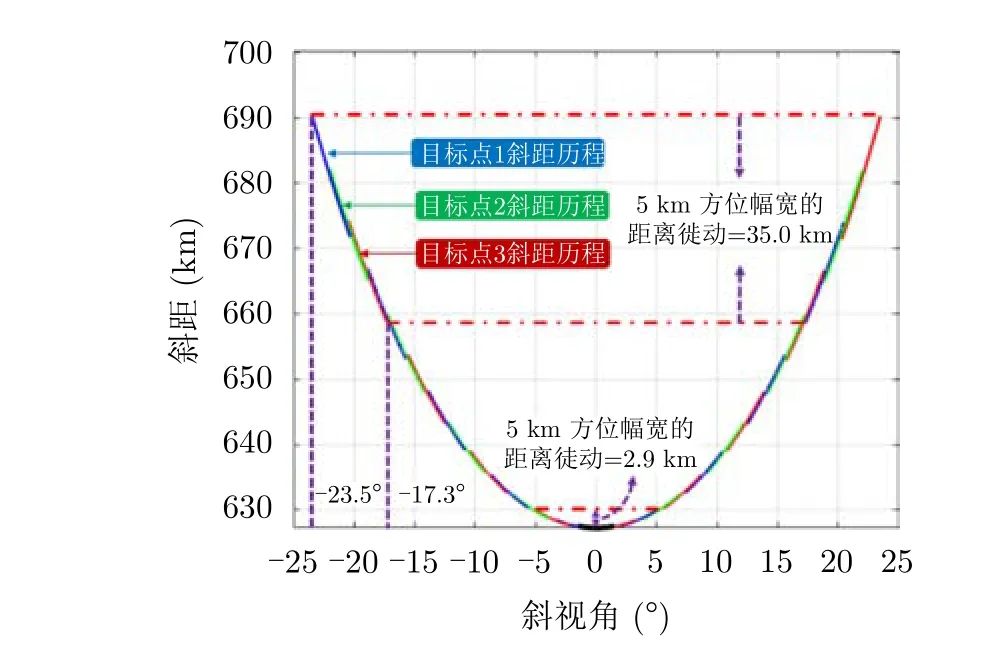
圖5 斜距隨掃描角度變化曲線Fig.5 Slant range varying with squint angle
為了解決斜視多方位角觀測(cè)所面臨的回波信號(hào)有效接收問題,一種新的工作體制被提出[42-46]。區(qū)別于傳統(tǒng)SAR系統(tǒng)采用的恒定脈沖重復(fù)周期,該工作體制通過調(diào)整雷達(dá)系統(tǒng)的采樣周期,修正雷達(dá)系統(tǒng)的回波窗開啟時(shí)刻,有效緩解超大距離徙動(dòng)對(duì)回波信號(hào)接收所帶來的影響。圖7對(duì)比給出了固定脈沖采樣間隔數(shù)據(jù)接收和基于方位非均勻采樣的數(shù)據(jù)接收示意圖。其中?t1表示回波信號(hào)在回波窗的位置。如圖7(a)所示,傳統(tǒng)雷達(dá)系統(tǒng)采用恒定脈沖采樣間隔數(shù)據(jù)獲取方式,距離徙動(dòng)量的變化將導(dǎo)致回波信號(hào)在回波窗中的位置發(fā)生變化,此時(shí),超大的距離徙動(dòng)量將導(dǎo)致回波信號(hào)溢出接收窗,進(jìn)而無法接收(如圖7(a)中第n個(gè)脈沖的回波溢出接收窗)。基于方位非均勻采樣的數(shù)據(jù)獲取方式,以斜距變化規(guī)律為基礎(chǔ),通過調(diào)整雷達(dá)系統(tǒng)的脈沖發(fā)射位置來改變回波窗的開啟時(shí)間,補(bǔ)償超大距離徙動(dòng)所造成回波信號(hào)延遲時(shí)間的變化,實(shí)現(xiàn)超大距離徙動(dòng)條件下回波信號(hào)的有效接收。
圖8給出了5 km×5 km場(chǎng)景的四個(gè)頂點(diǎn)在斜視狀態(tài)下的回波信號(hào)仿真結(jié)果,其中圖8(a)為固定脈沖采樣間隔數(shù)據(jù)接收模式回波信號(hào),圖8(b)為基于方位非均勻采樣的數(shù)據(jù)接收模式回波信號(hào)。如圖所示,當(dāng)雷達(dá)系統(tǒng)工作于固定脈沖采樣間隔時(shí),超大的距離徙動(dòng)導(dǎo)致雷達(dá)系統(tǒng)無法有效接收目標(biāo)場(chǎng)景的回波信號(hào);而基于方位非均勻采樣的工作新體制可有效補(bǔ)償超大距離徙動(dòng)所帶來的影響,實(shí)現(xiàn)斜視多方位角觀測(cè)模式下回波信號(hào)的有效接收。

圖6 回波窗數(shù)據(jù)接收示意圖Fig.6 Illustration of the receive window

圖7 固定脈沖間隔與方位非均勻采樣體制下脈沖發(fā)射與回波接收示意圖Fig.7 Illustration of receiving signal for uniform and non-uniform sampling strategy

圖8 點(diǎn)陣目標(biāo)場(chǎng)景回波信號(hào)仿真結(jié)果Fig.8 Echo data of point targets using uniform and non-uniform sampling

圖9 星載SAR多方位角觀測(cè)Fig.9 Illustrations of azimuthal multi-angles observation
綜上所述,在較小方位角觀測(cè)范圍內(nèi),采用傳統(tǒng)恒定脈沖重復(fù)周期的體制即可實(shí)現(xiàn);但當(dāng)方位觀測(cè)角范圍變大,需要在超大方位斜視角條件下進(jìn)行觀測(cè)時(shí),需采用方位非均勻采樣的工作新體制。
多方位角觀測(cè)增加了衛(wèi)星一軌過境對(duì)地觀測(cè)時(shí)間窗口,星載SAR系統(tǒng)對(duì)地探測(cè)能力顯著提升,基于方位非均勻采樣新體制,實(shí)現(xiàn)當(dāng)前SAR衛(wèi)星所不具備的成像模式及能力。例如:將超大觀測(cè)時(shí)間窗口分配于相鄰觀測(cè)區(qū)域,可實(shí)現(xiàn)高分辨率寬覆蓋對(duì)地觀測(cè)(如圖9(a)所示);將超大觀測(cè)時(shí)間窗口用于觀測(cè)同一觀測(cè)區(qū)域,可實(shí)現(xiàn)重點(diǎn)目標(biāo)多方位角精細(xì)解譯或動(dòng)目標(biāo)航跡獲取(如圖9(b)、圖9(c)所示);將超大觀測(cè)時(shí)間窗口分配于不同位置的重點(diǎn)目標(biāo),可實(shí)現(xiàn)廣域區(qū)域重點(diǎn)目標(biāo)靈活觀測(cè)(如圖9(d)所示)。
綜上,采用基于方位非均勻采樣新體制的多方位角觀測(cè)方式,不僅可進(jìn)一步提升高分辨率寬覆蓋對(duì)地觀測(cè)能力,同時(shí)還具備重點(diǎn)目標(biāo)多方位精細(xì)解譯、運(yùn)動(dòng)目標(biāo)航跡生成、廣域多目標(biāo)靈活觀測(cè)等觀測(cè)能力,實(shí)現(xiàn)了高分辨率寬覆蓋與靈活應(yīng)用的高度統(tǒng)一。
4 多方位角觀測(cè)星載SAR數(shù)據(jù)處理
本節(jié)主要介紹多方位角觀測(cè)星載SAR處理方法和處理結(jié)果。
4.1 多方位角觀測(cè)星載SAR成像處理算法
不同的應(yīng)用需求對(duì)分辨率和時(shí)效性的要求也不同,因此沒有通用的多方位角觀測(cè)星載SAR成像處理算法。但隨著方位斜視角度變大,方位/距離深度耦合加深,方位非均勻采樣現(xiàn)象明顯,精確解耦合難度大。如何選擇合適的解耦合方法,在斜視條件下實(shí)現(xiàn)多方位角觀測(cè)星載SAR精確成像處理是重點(diǎn)。
常用算法主要包括后向投影算法(Back Projection Algorithm,BPA)[47]、頻譜分析算法(SPECtral ANalysis,SPECAN)[48]、距離多普勒算法(Range Doppler Algorithm,RDA)[49]、調(diào)頻變標(biāo)算法(Chirp Scaling Algorithm,CSA)[50,51]、頻率尺度變換算法(Frequency Scaling Algorithm,FSA)[52,53]、距離徙動(dòng)算法(Range Migration Algorithm,RMA)[54]、Chirp Z變換算法(Chirp-Z Transform,CZT)[55]和極坐標(biāo)格式算法(Polar Format Algorithm,PFA)[56]等,文獻(xiàn)[57]對(duì)這些算法的適用模式、解決問題以及典型應(yīng)用進(jìn)行了系統(tǒng)的總結(jié),本文不再贅述。
此外,成像處理算法的選擇建議遵循如下原則:
(1)不同角度觀測(cè)下的數(shù)據(jù)都盡可能選擇同樣的參考坐標(biāo)性,可減小后續(xù)圖像配準(zhǔn)的復(fù)雜度;
(2)對(duì)于后續(xù)處理需要用到相位信息的,需要采用高保相算法;
(3)在滿足分辨率要求的情況下,盡量采用快速頻域算法。
4.2 觀測(cè)星載SAR動(dòng)目標(biāo)檢測(cè)
地面運(yùn)動(dòng)目標(biāo)檢測(cè)(GMTI)是星載SAR發(fā)展的重要方向之一,目前常采用較為成熟的方法包括DPCA,ATI,SATP等[58-60]。其中,DPCA和ATI處理流程較為簡單,但精度較差;STAP方法精度相對(duì)較高,但對(duì)系統(tǒng)接收通道數(shù)目要求較高,且處理流程復(fù)雜,難以實(shí)際應(yīng)用與星載SAR數(shù)據(jù)處理。此外,上述方法還存在速度模糊、方位速度無法估計(jì)等問題,難以滿足更高的應(yīng)用需求。
受德國TerraSAR-X衛(wèi)星Bi-Di模式啟發(fā)[61],利用多方位角觀測(cè)星載SAR序貫圖像可以精確的估計(jì)目標(biāo)方位向和距離向速度,估計(jì)精度可達(dá)到0.1 m/s,且避免速度模糊等問題。多方位角觀測(cè)星載SAR圖像運(yùn)動(dòng)目標(biāo)檢測(cè)與跟蹤模式如圖10所示,衛(wèi)星通過調(diào)整方位向觀測(cè)角度,在不同時(shí)間完成同一區(qū)域的觀測(cè),獲取包含動(dòng)目標(biāo)的序貫圖像。獲取的序貫圖像之間存在時(shí)間差,因此運(yùn)動(dòng)目標(biāo)在不同圖像中存在差異,利用上述差異可完成目標(biāo)方位向和距離向速度估計(jì)[18]。
理論證明,方位向速度估計(jì)不受距離向速度影響,因此首先對(duì)方位向速度進(jìn)行估計(jì),再對(duì)目標(biāo)距離向速度進(jìn)行估計(jì),流程如圖11所示,具體方位向和距離向速度估計(jì)如圖12和圖13所示。
為了驗(yàn)證該方法的有效性,利用TerraSAR-X衛(wèi)星凝視模式圖像產(chǎn)品進(jìn)行驗(yàn)證,如圖14所示。凝視模式下,方位向掃描角度范圍為±2.2°,對(duì)圖像產(chǎn)品做方位傅里葉變換,在距離多普勒域內(nèi)沿方位向?qū)⒂行拑?nèi)的頻譜平均劃分成5份,分別對(duì)劃分后的頻譜做方位向逆傅里葉變換,生成5幅序貫圖像。多普勒頻率和方位觀測(cè)角度有一一對(duì)應(yīng)的關(guān)系,不同的方位頻譜范圍對(duì)應(yīng)不同的方位觀測(cè)角度,利用凝視模式圖像產(chǎn)品可等效獲取序貫圖像。
從序貫圖像處理中可以看出,高鐵由于運(yùn)動(dòng)在序貫圖像中位置發(fā)生了偏移,通過測(cè)量像素的偏移和序貫圖像之間的時(shí)間基線,可完成目標(biāo)速度估計(jì)。本例中,測(cè)得的高鐵方位向速度為2.12 m/s,距離向速度為-17.22 m/s[16]。

圖10 多方位角觀測(cè)動(dòng)目標(biāo)檢測(cè)、跟蹤模式Fig.10 Movingt target detection mode based on azimuthal multi-angles observation

圖11 速度矢量提取流程圖Fig.11 The flowchart of velocity vector estimation
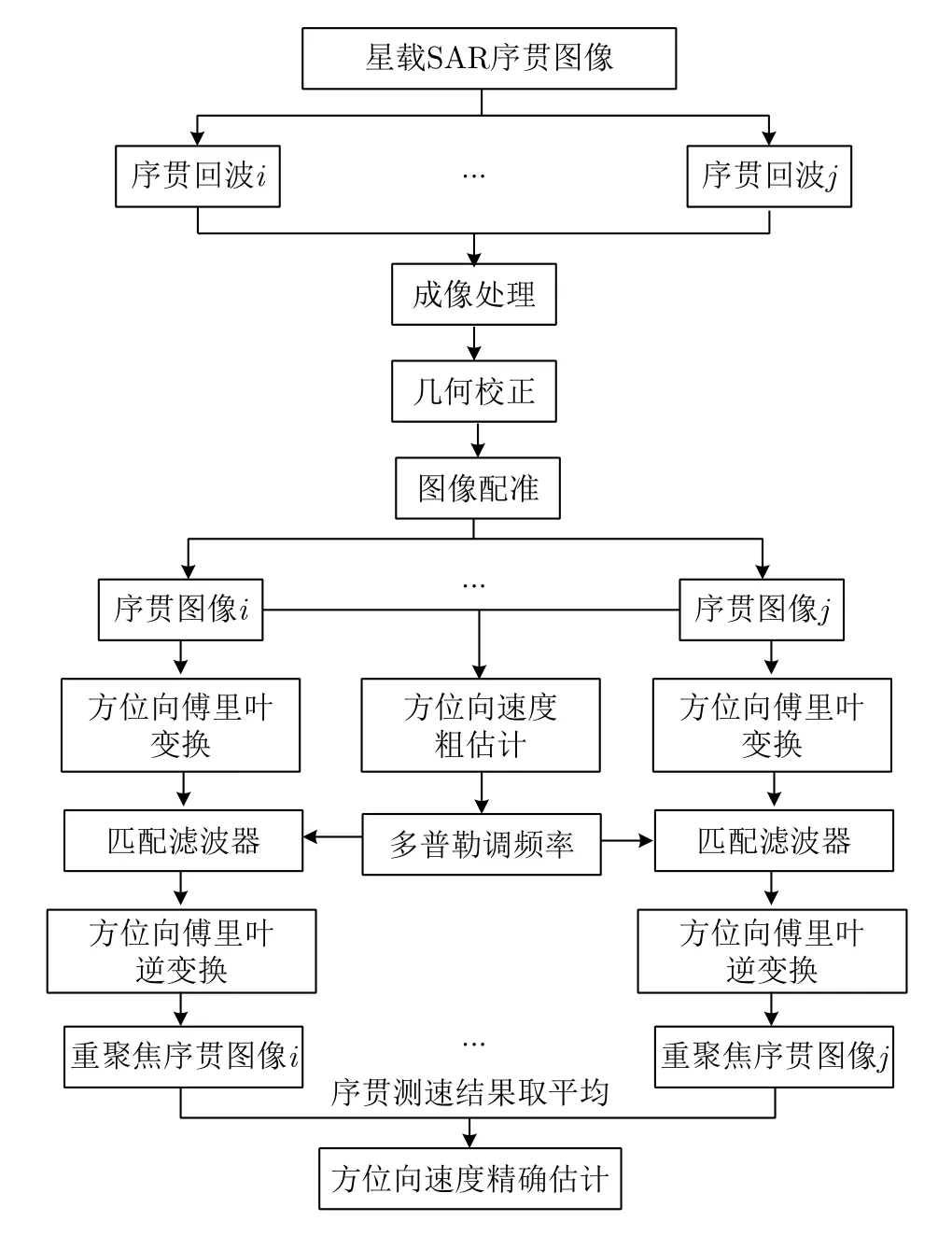
圖12 方位向速度估計(jì)流程圖Fig.12 The flowchart of azimuth velocity estimation

圖13 距離向速度估計(jì)流程圖Fig.13 The flowchart of range velocity estimation

圖14 多角度動(dòng)目標(biāo)序貫圖像(高鐵)Fig.14 Azimuthal multi-angles SAR images (high-speed railway)
利用速度估計(jì)結(jié)果,可進(jìn)一步完成目標(biāo)的重聚焦和重定位,可以精確繪制目標(biāo)的運(yùn)動(dòng)航跡,實(shí)現(xiàn)動(dòng)目標(biāo)的持續(xù)監(jiān)視。
4.3 多方位角觀測(cè)星載SAR圖像輻射質(zhì)量提升
斑點(diǎn)噪聲直接影響SAR圖像的輻射分辨率,不利于SAR圖像的判讀和定量化應(yīng)用。經(jīng)典的SAR圖像斑點(diǎn)噪聲抑制方法主要包括多視處理、空域?yàn)V波、變換域?yàn)V波等。這類方法雖然抑制了斑點(diǎn)噪聲,提升了輻射分辨率,但犧牲了方位向分辨率或者目標(biāo)的細(xì)節(jié)信息,因此上述方法需要在抑制噪聲和保持細(xì)節(jié)中進(jìn)行權(quán)衡。如何在在抑制斑點(diǎn)的同時(shí)保持空間分辨率和目標(biāo)細(xì)節(jié)的完整是未來研究的重要方向之一。
多方位角觀測(cè)SAR衛(wèi)星利用平臺(tái)機(jī)動(dòng)或波束掃描能力可從不同方位觀測(cè)角度獲取地面同一區(qū)域的場(chǎng)景圖像。因此可研究面向多方位角序貫圖像的斑點(diǎn)噪聲抑制新方法。其中,有代表性的是基于擴(kuò)展非局部均值濾波的斑點(diǎn)噪聲抑制方法。該方法首先利用非局部均值算法對(duì)第1幅圖進(jìn)行處理,并將其作為參考圖像。在此基礎(chǔ)上,將另一個(gè)角度觀測(cè)到的同一區(qū)域的圖像做為目標(biāo)圖像,聯(lián)合起來進(jìn)行濾波處理。進(jìn)行聯(lián)合濾波處理時(shí),在目標(biāo)圖像和參考圖像的對(duì)應(yīng)搜索區(qū)域中同時(shí)進(jìn)行相似性度量和權(quán)值計(jì)算,使更多有效的低噪聲像素參與到重建中,從而得到抑噪效果更好的結(jié)果。將該處理結(jié)果作為下一次的參考圖像,并和下幅圖像進(jìn)行聯(lián)合處理。依此類推,直到所有序貫圖像處理完畢,具體的流程圖如圖15所示。
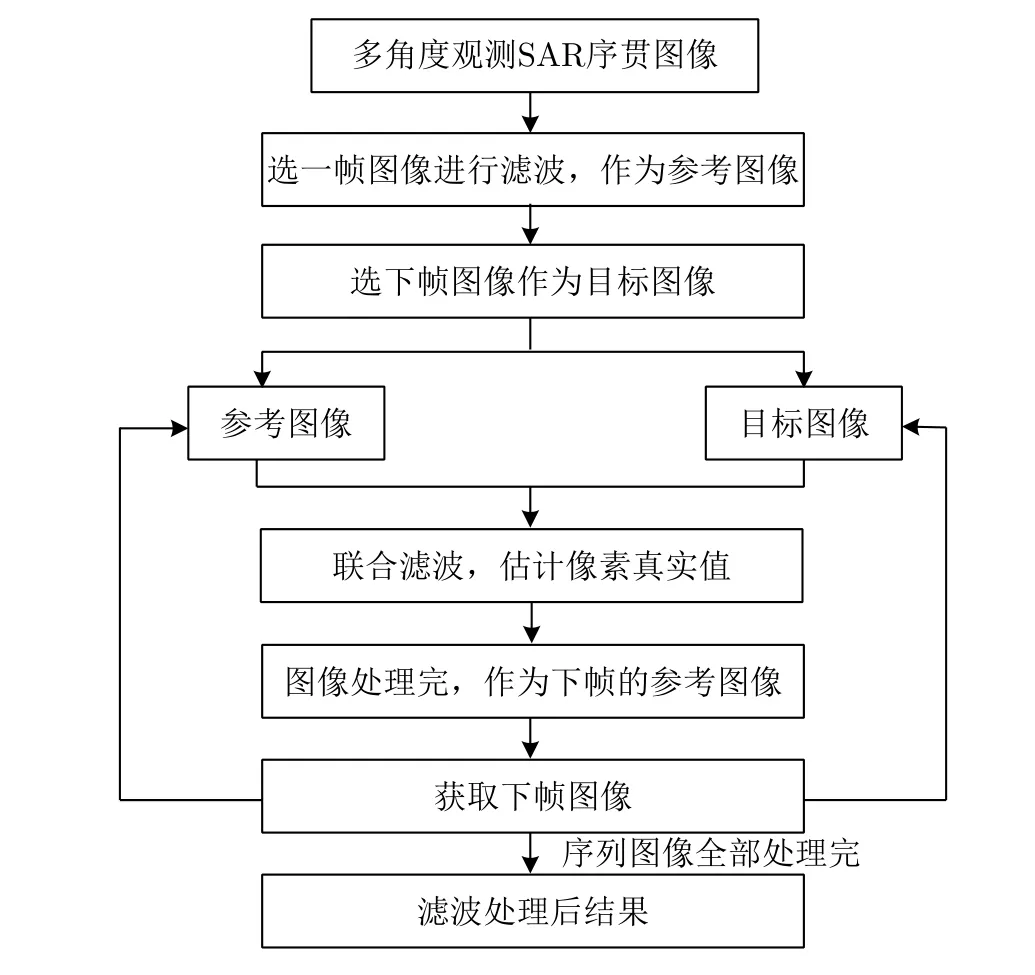
圖15 多方位角觀測(cè)SAR圖像斑點(diǎn)噪聲抑制流程圖Fig.15 The flowchart for speckle noise suppression based on azimuthal multi-angles SAR images
為了驗(yàn)證方位的有效性,選擇多方位角SAR圖像進(jìn)行處理驗(yàn)證,如圖16所示(試驗(yàn)采用TerraSAR-X圖像,四副圖像方位觀測(cè)角度分別是-1.7°,-0.5°,+0.5°和+1.7°)。對(duì)比處理結(jié)果可知,如表1所示,采用的圖像越多,濾波效果明顯、細(xì)節(jié)保留信息越好。
4.4 多方位角觀測(cè)星載SAR圖像旁瓣抑制
多方位角觀測(cè)星載SAR系統(tǒng)采用斜視工作模式,可獲取多幅大斜視角下的星載SAR圖像。然而,隨著方位斜視角度的增加,點(diǎn)目標(biāo)的頻譜扭曲隨之加劇,使得距離向和方位向的旁瓣傾斜,不再是沿距離向和方位向分布。因此,傳統(tǒng)旁瓣抑制方法無法直接進(jìn)行多方位角觀測(cè)星載SAR旁瓣抑制。
為解決傾斜旁瓣抑制的問題,可將斜視SAR圖像“校正”,利用優(yōu)化旁瓣抑制算法進(jìn)行旁瓣抑制,再將SAR圖像恢復(fù)到原來的旁瓣延伸方向,從而得到旁瓣抑制后的單樣本SAR圖像。具體方法為:首先利用位移原理,對(duì)斜視條件下的頻譜進(jìn)行方位向校正,再對(duì)方位向校正后的數(shù)據(jù)進(jìn)行距離向頻譜校正。然后,使用改進(jìn)空間變跡(Spatially Variant Apodization,SVA)算法進(jìn)行旁瓣抑制。最后,再次利用位移原理,將旁瓣抑制后的數(shù)據(jù)恢復(fù)至原始的旁瓣延伸方向,即得到最終的處理結(jié)果[15],具體流程如圖17所示。
為驗(yàn)證斜視條件下旁瓣抑制處理方法的有效性和效果,采用機(jī)載圖像進(jìn)行驗(yàn)證,如圖18所示。本例中采用了10幅圖,方位角范圍從-10°~10°,圖18(a)給出了原始圖中的一幅,圖18(b)給出了旁瓣抑制后的結(jié)果,可以看出,利用多方位角觀測(cè)圖像產(chǎn)品可有效抑制旁瓣的影響。

圖16 濾波處理結(jié)果Fig.16 Filtering results

表1 輻射分辨率分析結(jié)果Tab.1 Radiation resolution analysis results
4.5 多方位角觀測(cè)星載SAR圖像信噪比提升
SAR圖像信噪比是影響圖像質(zhì)量的重要因素,信噪比較差時(shí)會(huì)影響目標(biāo)識(shí)別效果,甚至導(dǎo)致目標(biāo)“淹沒”于噪聲之中。傳統(tǒng)信噪比增強(qiáng)方法多采用提升SAR載荷發(fā)射功率或?yàn)V波等方法,但當(dāng)場(chǎng)景較為復(fù)雜時(shí),上述方法的效果有限。多方位角觀測(cè)星載SAR可從不同角度獲取同一區(qū)域的圖像,利用圖像之間目標(biāo)信息的冗余性和噪聲之間的獨(dú)立性,通過聯(lián)合處理方法可提升圖像的信噪比。
為實(shí)現(xiàn)多方位角觀測(cè)星載SAR圖像信噪比提升,可基于SAR圖像的統(tǒng)計(jì)信息建立圖像的正則化變分模型,利用梯度下降算法來對(duì)模型進(jìn)行尋優(yōu)求解,以此來提升SAR圖像信噪比。該方法首先對(duì)多幅多方位角圖像進(jìn)行配準(zhǔn)處理,其次,根據(jù)圖像統(tǒng)計(jì)特性及圖像中典型目標(biāo)特征選取正則化約束項(xiàng),根據(jù)選取的正則化約束項(xiàng)建立正則化變分模型,接下來通過梯度下降算法對(duì)模型進(jìn)行尋優(yōu)求解,通過多次迭代計(jì)算,得到處理后的圖像。具體的處理流程圖如圖19所示。
為了驗(yàn)證信噪比提升方法的有效性,利用5幅不同方位角觀測(cè)圖像進(jìn)行驗(yàn)證,如圖20(a)—圖20(e),方位向觀測(cè)角度分別為-6.5°,-3.3°,0°,3.3°和6.5°。經(jīng)過信噪比提升后的處理結(jié)果如圖20(f)所示。對(duì)比處理前后圖像可知,噪聲得到顯著抑制,目標(biāo)細(xì)節(jié)信息更為清晰,視覺效果和圖像質(zhì)量得到大幅提升,為后續(xù)目標(biāo)解譯和判讀奠定了基礎(chǔ)。需要說明的是,采用正則化的處理方法,不僅信噪比得到了提升,輻射分辨率也同時(shí)得到了提升。
4.6 多方位角觀測(cè)星載SAR圖像超分辨
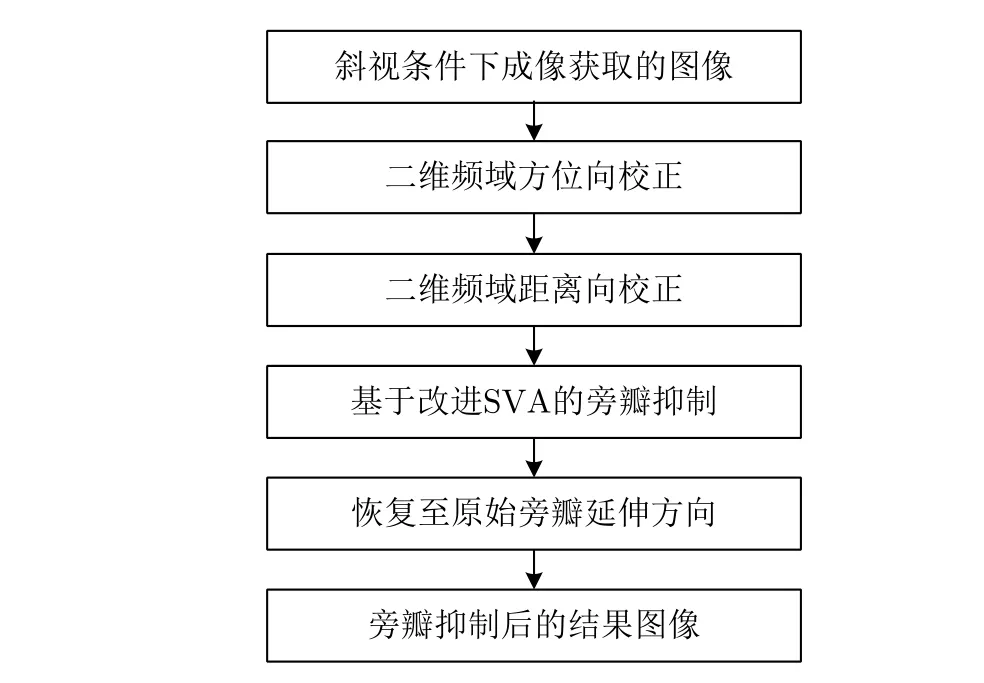
圖17 斜視條件下旁瓣抑制處理流程Fig.17 The flowchart for sidelobe suppression in squint
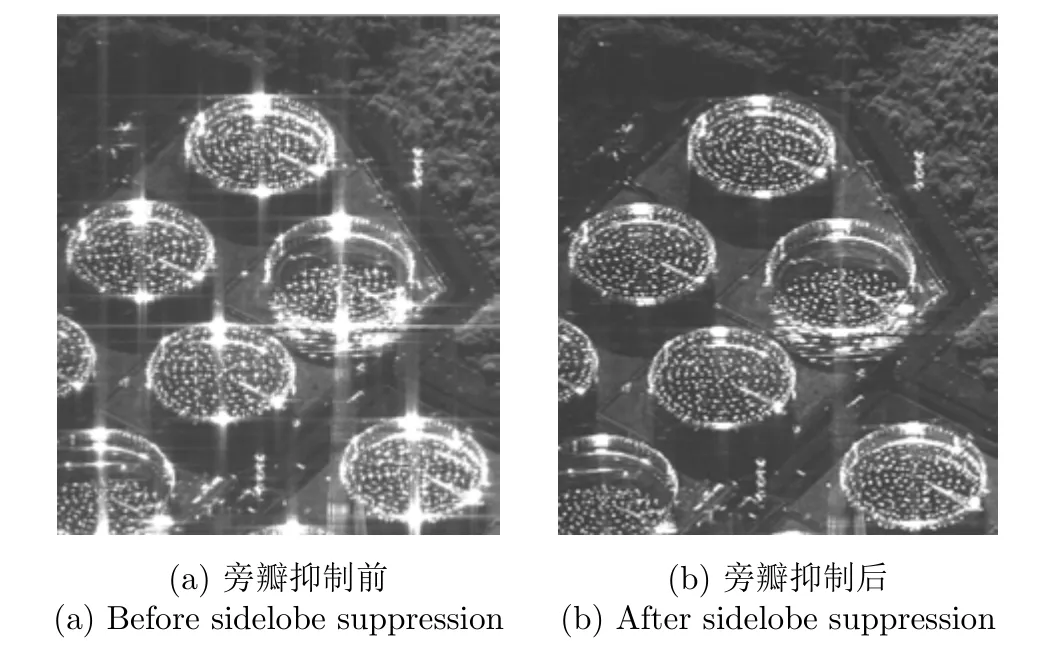
圖18 斜視條件下旁瓣抑制處理試驗(yàn)結(jié)果Fig.18 Sidelobe suppression results
高分辨率是星載SAR系統(tǒng)永恒的追求,然而隨著分辨率的逐漸增加,星載SAR系統(tǒng)復(fù)雜度顯著增加,成像難度急劇增加。多方位角觀測(cè)星載SAR可獲取同一區(qū)域的多幅SAR圖像,在圖像數(shù)量增加的情況下,通過挖掘不同圖像成像模型之間的相關(guān)參數(shù),并對(duì)這些相關(guān)參數(shù)進(jìn)行聯(lián)合建模,控制待估計(jì)參數(shù)的個(gè)數(shù),可達(dá)到超分辨的目的,從而為成像分辨率提升提供了技術(shù)新思路[62]。
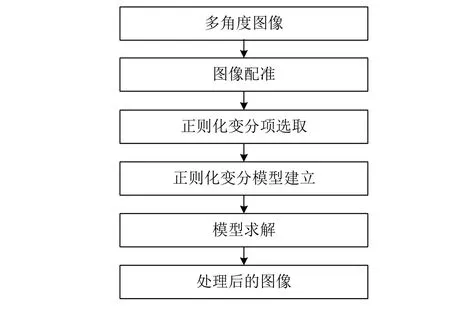
圖19 多方位角觀測(cè)星載SAR信噪比提升流程圖Fig.19 The flowchart of SNR improvement based on azimuthal multi-angles observation

圖20 多方位角觀測(cè)SAR圖像目標(biāo)信噪比提升Fig.20 SNR improvement result based on azimuthal multi-angles observation
基于多方位角觀測(cè)星載SAR獲取的多幅SAR圖像,構(gòu)建總變分模型向量,并在向量總變分范數(shù)基礎(chǔ)上通過求解模型Euler-Lagrange方程,實(shí)現(xiàn)圖像的超分辨。利用多方位角觀測(cè)機(jī)載圖像對(duì)方法有效性進(jìn)行驗(yàn)證,如圖21所示。圖21(a)—圖21(e)為5幅原始多方位角觀測(cè)圖像,方位觀測(cè)角度分別為-7°,-3°,0°,3°和7°。經(jīng)過超分辨率處理后,可發(fā)現(xiàn)點(diǎn)狀目標(biāo)明顯更為清晰(如圖21(f)所示),相對(duì)與單角度觀測(cè)圖像,方位向和距離向分辨率均得到顯著提升,其中方位向分辨率提升了2.16倍,距離分辨率提升了1.03倍。

圖21 多方位角觀測(cè)SAR超分辨率處理結(jié)果Fig.21 Super-resolution processing result based on azimuthal multi-angles observation
4.7 多方位角觀測(cè)星載SAR成像立體定位
SAR圖像立體定位技術(shù)是實(shí)現(xiàn)SAR圖像目標(biāo)定位的重要方法之一,并具備提取目標(biāo)高程的能力。但對(duì)于傳統(tǒng)星載SAR系統(tǒng),需要多次航過才能獲取符合立體定位的圖像產(chǎn)品,難以快速實(shí)現(xiàn)目標(biāo)區(qū)域的立體定位。多方位角觀測(cè)星載SAR系統(tǒng)在單航過中可對(duì)目標(biāo)區(qū)域進(jìn)行多方位角觀測(cè),獲取滿足立體定位要求的序貫SAR圖像對(duì),從而實(shí)現(xiàn)快速立體定位。

圖22 幾何觀測(cè)模型Fig.22 Geometric observation model
目前,最常用的SAR圖像立體像對(duì)獲取方式為同側(cè)立體觀測(cè)和異側(cè)立體觀測(cè),其幾何觀測(cè)模型分別如圖22(a)和圖22(b)所示。同側(cè)立體觀測(cè)表示兩幅圖像獲取時(shí)SAR平臺(tái)在成像區(qū)域的同一側(cè),該方式獲取的兩幅SAR圖像散射特性相似,圖像幾何形變差別不大,圖像配準(zhǔn)容易,但視差和基高比小,因此定位精度低。異側(cè)立體觀測(cè)時(shí)SAR平臺(tái)在觀測(cè)區(qū)域的異側(cè),導(dǎo)致兩幅SAR圖像散射特性相差較大,圖像幾何形變差別大,定位精度比同側(cè)立體觀測(cè)精度高,但圖像配準(zhǔn)難度大。圖22(c)給出了多方位角立體觀測(cè)模型,在衛(wèi)星一次飛行過程中多方位角觀測(cè)星載SAR可對(duì)成像區(qū)域進(jìn)行不同方位角度的斜視觀測(cè),獲取多方位角觀測(cè)SAR圖像立體像對(duì),從而實(shí)現(xiàn)立體定位。
同側(cè)立體觀測(cè)和異側(cè)立體觀測(cè)主要工作在正側(cè)視條件下,方位觀測(cè)角度相同,需要兩軌SAR圖像實(shí)現(xiàn)立體定位。但受衛(wèi)星軌道的限制,獲取兩軌SAR圖像需要間隔一定的時(shí)間,無法實(shí)現(xiàn)快速立體定位。多方位角立體觀測(cè)在衛(wèi)星一軌飛行過程中,對(duì)目標(biāo)區(qū)域從不同方位角度進(jìn)行觀測(cè)并構(gòu)建立體像對(duì),可實(shí)現(xiàn)快速立體定位。
傳統(tǒng)單幅SAR圖像R-D定位算法采用的是地球模型方程、斜距方程和多普勒方程進(jìn)行目標(biāo)定位。但當(dāng)目標(biāo)高程未知時(shí),地球模型方程不再成立,因此無法實(shí)現(xiàn)目標(biāo)的立體定位。多方位角觀測(cè)立體圖像對(duì)(以M副圖像為例)在完成圖像配準(zhǔn)后(配準(zhǔn)流程如圖23),可提供M個(gè)斜距方程和M個(gè)多普勒方程,因此問題轉(zhuǎn)換成求解超定方程,可采用牛頓迭代法等數(shù)值方法進(jìn)行求解。
為了驗(yàn)證單軌多方位角SAR圖像立體定位方法的有效性,采用點(diǎn)目標(biāo)進(jìn)行仿真驗(yàn)證,如圖24(a)所示,P1~P5的高度分別為30 m,30 m,0 m,-30 m,-30 m。采用傳統(tǒng)單角度定位方法和多方位角定位方法結(jié)果如圖24(b)所示。從結(jié)果可看出,采用多方位角立體定位,結(jié)果(藍(lán)色點(diǎn))和設(shè)置點(diǎn)(紅色點(diǎn))完全重合,而采用單角度定位方法的結(jié)果(綠色點(diǎn))則存在較大定位誤差。

圖23 多方位角SAR圖像配準(zhǔn)流程圖Fig.23 The flowchart of image registration based on azimuthal multi-angles observation

圖24 立體定位仿真結(jié)果示意圖Fig.24 Three dimension location results
4.8 多方位角觀測(cè)星載SAR三維成像
層析合成孔徑雷達(dá)技術(shù)(Tomography SAR,TOMO-SAR)的提出使得SAR在高度維方向不僅具有了高度測(cè)量能力,還同時(shí)具備空間分辨能力,可實(shí)現(xiàn)目標(biāo)的三維成像。經(jīng)典星載TOMO-SAR系統(tǒng)工作在正側(cè)視條件下,利用多次航過獲取的SAR圖像序列實(shí)現(xiàn)目標(biāo)三維成像。這種方式的缺點(diǎn)在于僅能獲取方位正側(cè)視條件下的目標(biāo)三維信息,對(duì)目標(biāo)側(cè)面的信息描述不夠;多方位角觀測(cè)星載SAR系統(tǒng)利用多次航過,可獲取不同方位角度的序貫圖像序列。
和傳統(tǒng)正側(cè)視TOMO處理不同,為獲取不同方位角觀測(cè)角下的三維圖像,需要將正側(cè)視TOMO技術(shù)拓展到方位斜視觀測(cè)的情況,處理獲取不同方位觀測(cè)角度下目標(biāo)的三維圖像,其核心是如何在斜視條件下實(shí)現(xiàn)TOMO成像,進(jìn)而通過融合處理得高質(zhì)量的三維圖像產(chǎn)品。方位斜視TOMO和正側(cè)視TOMO成像本質(zhì)機(jī)理一樣,但對(duì)配準(zhǔn)精度要求更高。正側(cè)視情況下,圖像配準(zhǔn)精度達(dá)到0.1個(gè)像素單元時(shí),對(duì)三維成像的影響可以忽略。但在斜視條件下,多普勒中心頻率較大,同樣配準(zhǔn)誤差條件下引入的相位誤差不可忽略,在大斜視條件下,對(duì)配準(zhǔn)精度的要求提高1個(gè)數(shù)量級(jí)。
圖25給出了多方位角觀測(cè)星載SAR三維成像處理流程圖,主要包括:多方位SAR圖像立體定位、SAR斜視層析處理和多方位角三維點(diǎn)云融合處理3個(gè)步驟。其中,在融合處理中,首先將點(diǎn)云轉(zhuǎn)換到同一坐標(biāo)系下,得到幾何校正后的三維點(diǎn)云,進(jìn)而對(duì)不同方位角的三維點(diǎn)云在同一坐標(biāo)系下進(jìn)行融合。融合時(shí)可再劃分三維網(wǎng)格,網(wǎng)格間距可依照三維分辨率設(shè)定,并根據(jù)目標(biāo)點(diǎn)空間位置確定目標(biāo)點(diǎn)所在網(wǎng)格。由于多方位角的三維點(diǎn)云存在重復(fù)目標(biāo)點(diǎn),當(dāng)一個(gè)網(wǎng)格里面具有多個(gè)目標(biāo)點(diǎn)時(shí),則分別以這些目標(biāo)點(diǎn)的幅度和幾何位置參數(shù)的平均值當(dāng)做該網(wǎng)格目標(biāo)的幅度和幾何位置參數(shù)。通過上述處理,得到多方位角三維點(diǎn)云融合圖像。
為了驗(yàn)證方法的可行性,利用直升機(jī)模型進(jìn)行仿真驗(yàn)證。圖26(a)給出了直升機(jī)模型,圖26(b)和圖26(c)分別給出了方位正負(fù)45°條件下的三維處理結(jié)果,圖26(d)給出了融合處理后的結(jié)果。從結(jié)果可以看出,通過融合不同角度下三維成像結(jié)果可更為精確的描述目標(biāo)的細(xì)節(jié)特征,更有利目標(biāo)的識(shí)別和確認(rèn)。

圖25 多方位角觀測(cè)星載SAR三維成像處理流程Fig.25 The flowchart of three dimension imaging based on azimuthal multi-angles observation
5 結(jié)束語
本文對(duì)多方位角觀測(cè)星載SAR技術(shù)進(jìn)行了總結(jié),分析了當(dāng)前和未來高性能SAR衛(wèi)星的工作能力,在此基礎(chǔ)上介紹了基于多方位角觀測(cè)的星載SAR工作新模式及處理方法,闡述了其在目標(biāo)信息獲取和圖像質(zhì)量提升等方面的應(yīng)用,展示了初步的研究成果。可以預(yù)見,多方位角觀測(cè)是星載SAR未來一種重要的工作方式,并將進(jìn)一步向全方位觀測(cè)方向發(fā)展,從而跨越式提升星載SAR圖像產(chǎn)品的質(zhì)量、任務(wù)響應(yīng)速度和應(yīng)用效益。
