合成孔徑雷達極化成像解譯識別技術的進展與展望
2020-05-18 05:27:24王雪松陳思偉
雷達學報 2020年2期
王雪松 陳思偉
(國防科技大學電子科學學院電子信息系統復雜電磁環境效應國家重點實驗室 長沙 410073)
1 引言
隨著雷達探測環境的復雜化、應用領域的多樣化,對目標物理參數反演、分類識別等都提出了越來越高的要求[1]。在此推動下,具備全極化測量能力的極化合成孔徑雷達(Synthetic Aperture Radar,SAR)應運而生,并在對地觀測、災害遙感、海洋遙感、偵察監視等領域成為主流傳感器,得到越來越廣泛的應用[2-8]。
極化SAR能夠獲取目標的全極化信息,使得對目標極化散射機理進行完整刻畫成為可能。極化目標分解是解譯目標散射機理的重要方法,其突出優點在于解譯結果通常具有明晰的物理意義。由于分解得到的散射機理直接與目標的物理屬性和電磁散射過程相聯系,極化目標分解方法得到國內外學者的廣泛關注,屬于極化SAR目標散射解譯的研究前沿。另一方面,雷達目標的散射特性與姿態、成像視角等密切相關,通常呈現散射的多樣性。目標散射多樣性給散射機理的建模和解譯帶來了極大地挑戰,也是近年來極化目標分解方法發展的內在驅動力。與此同時,目標散射多樣性也蘊含了表征目標屬性的豐富信息。對目標的散射多樣性進行有效挖掘和利用,能夠給目標散射機理解譯與應用帶來新的研究思路[8-12],近年來也得到研究人員的高度重視[13-15]。
當前,越來越多的先進極化SAR系統相繼研制成功并投入使用。典型星載極化SAR有加拿大的Radarsat-2/3、日本的ALOS-1/2、中國的高分三號等。與此同時,極化SAR系統正朝著多頻段、多模式、超高分辨等方向快速發展。例如,德國的機載F-SAR多波段極化SAR系統的成像分辨率可達亞米級。這不僅為極化SAR應用提供了更為精細的數據,也對目標機理建模、散射解譯、參數反演和分類識別等信息處理提出了更高的要求[16]。
本文簡要總結近年來極化SAR成像解譯與識別方面的研究進展。在目標散射機理解譯方面,主要介紹基于特征值分解和基于散射模型為代表的非相干極化目標分解,以及極化旋轉域解譯等理論方法的研究進展[8-11,17,18]。在此基礎上,結合我們近年來在極化SAR信息處理方面的實踐,介紹這些極化解譯方法在目標檢測、地物分類和建筑物損毀評估等領域的實際應用。最后,對極化SAR機理解譯與應用的發展進行簡要展望。
2 極化SAR目標解譯識別研究進展
2.1 極化矩陣及旋轉處理
在水平和垂直極化基(H,V)下,極化SAR獲取的目標全極化信息可以由極化散射矩陣表征

其中,SVH是水平極化發射,垂直極化接收的后向散射系數。其它項類似定義。
將極化散射矩陣沿雷達視線進行旋轉,就可以得到極化旋轉域中的極化散射矩陣,為

其中,上標T表示轉置。θ為旋轉角,θ∈[?π,π)。旋轉矩陣為R2(θ)=,下標“2”指矩陣的維度。
滿足互易性假設條件(SHV=SVH)時,可以得到在極化SAR信息處理中常用的極化相干矩陣,為

其中,kP=為Pauli散射矢量,上標H表示共軛轉置。是集合平均處理。Tij是T的(i,j)元素。
將極化相干矩陣拓展到極化旋轉域,可得

其中,旋轉矩陣為R3(θ)=。
2.2 極化目標分解的研究進展
極化SAR通過收發極化狀態正交的電磁波,能夠獲取目標的全極化信息。通過對目標電磁散射特性的建模與分析,能夠更準確地理解目標極化散射機理,有助于準確反演目標物理參數。極化目標分解理論在近年不斷發展,成為極化SAR散射機理解譯的主流理論工具,并廣泛應用于參數反演、目標分類、極化校準、人造目標刻畫等領域,為定量遙感奠定了基礎[18-22]。
極化目標分解可以分為相干分解和非相干分解兩大類。相干分解主要基于極化散射矩陣,代表性方法有Krogager分解[23]和Cameron分解[24]及其系列改進方法[25-27]等,重點應用于空中和地面人造目標解譯。由于可供建模的參數有限,且散射模型主要來源于球體、平板、二面角、偶極子、螺旋散射體等確定性散射體,相干分解的原理和方法已經相對成熟,近年來鮮見新進展。相比于相干分解,非相干分解方法更適用于大場景的地物分析,近年來得到持續發展和應用。非相干分解主要基于極化相干矩陣和極化協方差矩陣,包含基于特征值分解的極化目標分解和基于散射模型的極化目標分解兩類,下面分別介紹其基本原理和主要研究進展。
2.2.1 基于特征值分解的極化目標分解方法
對極化相干矩陣等二階統計量進行特征值分解,闡釋各特征值和特征矢量的內在聯系與物理意義,是基于特征值分解的極化目標分解理論的核心思想。代表性方法為Cloude-Pottier分解[28],其表達式為

其中,Σ為對角陣,包含極化相干矩陣T的3個特征值λi,i=1,2,3。U為酉矩陣,包含極化相干矩陣T的3個特征矢量ui。對特征矢量ui進行參數化表征,可以得到

這樣,利用對應的特征值和特征矢量構建的正交基,就可以將極化相干矩陣T分解為相互正交的3個矩陣,為
Cloude和Pottier從式(7)中導出了一系列特征參數對地物散射特性進行解譯和理解。其中,最常用的3個極化特征如下:
(1)極化熵H
在一個散射單元內,通常包含多個具有不同散射類型的散射體。極化熵的提出就是為了描述這些不同散射體在統計上的隨機程度,定義為
極化熵H取值范圍為[0,1],如果極化熵H取值較低(H<0.3),則認為該散射單元的去極化效應較弱,因而可以提取主散射機理。如果極化熵取值較大,則在一個散射單元內混合存在具有不同散射類型的散射體。隨著極化熵取值的進一步增大,觀測數據中散射機理類別的可區分度隨之降低。當取極值H=1時,觀測數據完全為隨機噪聲,無法提取有用的極化信息。
(2)極化反熵A(又稱為極化各向異性度)
極化反熵A是極化熵H的一個補充參數,主要考察較小的兩個特征值參數之間的相對大小。將特征值參數降序排列λ1≥λ2≥λ3>0,則極化反熵A的定義為

通常,當極化熵H >0.7時,可以利用極化反熵進一步區分散射體的散射類型。當極化熵取值較小時,第2和第3特征值通常取值較小并受噪聲影響較大,此時得到的極化反熵參數也是嚴重受噪聲污染的。

Cloude-Pottier分解在極化SAR地物分類領域得到了十分廣泛地應用[8,20,29]。與此同時,研究人員也從統計分析[30]、多視影響[31]、極化相干[32]等角度對Cloude-Pottier分解方法進行了更為深入地研究和改進。
此外,基于特征值分解的解譯思路也得到研究人員的高度重視。近年來,其它有代表性的基于特征值分解的方法主要有Touzi分解[33]和Paladini分解[34]。其中,Touzi進一步對分解得到的特征矢量進行解譯,提出了一系列旋轉不變極化特征參數用于地物刻畫,并成功用于濕地信息提取[33]。Paladini等研究人員從圓極化基極化矩陣的表征入手,發展了基于特征值分解的信息無損和完備的極化目標分解算法[34],并用于極化SAR和極化ISAR目標分類。
總體而言,基于特征值分解的目標分解方法具有明確的數學背景,通常能夠得到唯一的分解結果,其發展也相對成熟。
2.2.2 基于散射模型的極化目標分解方法
基于散射模型的極化目標分解的核心思想是將散射體的散射機理分解為偶次散射(二面角散射或者二次散射)、奇次散射(平板散射或者面散射)、體散射和螺旋散射等基本散射分量,通過分析各基本散射分量的能量等物理參量,解譯散射體的散射機理。這種極化分解理論直接基于基本散射模型,分解結果具有明確的物理意義,得到了廣泛應用[18,35]。
Freeman-Durden分解是該領域的先驅工作[36]。該方法在散射對稱性假設下,將極化協方差矩陣/極化相干矩陣分解為二次散射、奇次散射和體散射機理,進而用于地物散射特性的解譯與分析。以極化相干矩陣T為例,Freeman-Durden分解的表達式為

其中,Tvol,Tdbl和Todd分別為體散射、二次散射和奇次散射模型。fv,fd和fs為對應的模型系數。
具體而言,Freeman-Durden分解中用到的體散射、二次散射和奇次散射模型分別為
其中,α和β為二次散射和奇次散射模型的參數。
從式(11)—式(14)可以看到,Freeman-Durden分解中,只有體散射模型具有交叉極化分量(即T33分量)。這樣在模型求解中,首先求取體散射模型系數,并將體散射分量從原始極化相干矩陣中減掉。然后,根據二次散射和奇次散射判決準則(即硬判決條件),再依次求取其模型參數和系數,完成模型參數反演。從上述求解步驟可以看到,體散射模型具有最高的優先級。不論任何目標,只要其極化相干矩陣中交叉極化分量T33不為0,則必定有體散射機理。上述隱含的假設條件和求解順序通常會導致體散射機理的過估計,并可能使剩余的二次散射/奇次散射分量出現負能量情形,違背物理原理。此外,在Freeman-Durden分解中,由于引入了散射對稱性假設,極化相干矩陣的T13和T23分量沒有被用于散射機理建模,極化信息利用不夠充分。
針對上述問題,特別是從2010年以來,基于散射模型的極化目標分解成為成像雷達目標極化散射解譯領域的研究熱點,并取得一系列新進展。2014年,筆者受邀在《IEEE Signal Processing Magazine》的“Recent Advances in Radar Imaging”專刊上發表介紹成像雷達目標極化散射建模與解譯的長篇綜述[18],對部分研究進展進行了總結。在此基礎上,并結合近年來國內外最新研究成果,將這些主要研究進展歸納為以下7個方面,并進行梳理總結。
(1)增加散射分量
Freeman-Durden分解是三分量分解方法。考慮到實測數據中人造目標和大部分自然地物并不滿足散射對稱性假設,Yamaguchi等研究人員[37]于2005年引入了螺旋散射分量,并建立了四分量分解方法。螺旋散射分量具有旋轉不變性,適于描述散射非對稱情形。因此,這一方法有效克服了散射對稱性假設。以極化相干矩陣進行表征,得到的螺旋散射模型為

2018年,為了利用極化相干矩陣的T13分量,Gulab和Yamaguchi[38]提出了一種六分量分解方法。該方法的核心是提出了兩種分別基于不同取向的偶極子和四分之一波器件的混合散射模型。這兩種混合散射模型能夠分別利用上T13分量的實部和虛部。在此基礎上,Gulab和Yamaguchi等研究人員[39]進一步提出一種混合散射模型,用于利用極化相干矩陣中T23分量的實部,并構建了一種七分量分解方法。然而,值得指出的是,這些混合散射模型通常與實際目標缺乏明確的對應關系,難以有效用于實際目標的極化散射分析。此外,相比于不斷增加散射分量的思路,構建更加精細化的散射模型或許更值得推崇。
(2)非負特征值約束準則
在Freeman-Durden三分量分解求解過程中,體散射分量首先求解并從原始極化相干矩陣中減掉。由于Freeman-Durden分解方法采用的是不具有交叉極化能量的傳統二次散射模型式(13)和奇次散射模型式(14),上述處理方法通常會導致體散射機理過估計,進而在后續模型求解時產生負能量現象。針對這一問題,2011年,van Zyl等研究人員[40]在保留傳統模型基礎上,引入了非負特征值約束準則,有效避免了負能量現象,其表達式如下

(3)方位向補償處理(又稱去取向處理)
極化方位角是描述電磁波極化狀態的一個重要參數。在極化SAR成像模式下,沿飛行航跡起伏的地表和方位向與飛行航跡有夾角的建筑物(簡稱傾斜排列建筑物)都會在散射入射波時引起極化基的變化,從而引起極化方位角偏移。因此,通過分析極化方位角的變化,就可以提取地形起伏和建筑物方位向等特征信息。極化方位角可以通過旋轉極化相干矩陣使交叉極化分量最小而得到,為[43]

其中,Re(T23)為T23的實部。可以看到,θ角參數的主值區間為[?π/4,π/4]。
將式(17)代入式(4),可以完成極化相干矩陣的方位向補償處理。2010年起,方位向補償處理作為極化相干矩陣的預處理步驟,被引入Freeman-Durden三分量和Yamaguchi四分量等目標分解方法[22,44,45]。由于這些目標分解方法均采用了傳統二次散射模型式(13)和奇次散射模型式(14),即隱含假設二次散射和奇次散射不產生交叉極化項T33。這樣,給定體散射模型后,體散射分量的能量主要由交叉極化項T33來確定。方位向補償處理使得T33最小化,則可有效緩解體散射分量的過估計,改善極化目標分解性能。可以看到,方位向補償處理并沒有增加散射模型的機理刻畫能力。同時,極化方位角為分辨單元內所有散射體的平均極化方位角。對一些具有較大極化方位角的人造目標區域,結合方位向補償處理的傳統極化目標分解方法仍面臨局限性。因此,研究并建立具有更好機理刻畫能力的精細化散射模型得到國內外研究人員更為廣泛的重視。
(4)精細化的體散射模型
Freeman-Durden分解方法最早是用于自然地物(如森林等)的散射機理分析與信息提取。因此,構建精細化的體散射模型最先得到研究人員的重視,并在相當長一個時期內成為這一領域的主要研究方向。
體散射分量通常由一簇取向隨機的基本散射體Tvol(θ)進行描述。當基本散射體取向角θ滿足概率密度函數p(θ)時,通過積分就可以得到體散射模型

其中,模型參數a,b和c是實數,d,e和f是復數。
當p(θ)為均勻分布時,得到的模型即為Freeman-Durden分解中的體散射模型式(12)。考慮到森林(如針葉林、闊葉林等)等植被區域,其枝葉分布通常具有一定的取向性。通過構建具有針對性的概率密度函數p(θ),則有望得到更加精細的體散射模型。2005年,Yamaguchi四分量分解[37]中提出了一種截斷型正弦概率分布,對水平和垂直偶極子可以得到額外兩個體散射模型。在此之后,為了使體散射模型更加精細和準確,研究人員也相繼提出了一些其他的概率分布用于體散射建模[46-48]。其中,文獻[46]提出利用von Mises分布來刻畫植被的冠層。文獻[47]引入了n次余弦平方函數的概率分布。該分布主要由取向角均值和表面粗糙度參數進行描述。此外,基于多視數據相位差的分布函數,文獻[48]提出了一系列的模型用于匹配不同的方位角分布。然而,正如文獻[47]也指出,目前并沒有理論依據判斷哪種概率分布描述方式更好。因此,其它的概率分布函數也是可以采用的。
(5)精細化的二次和奇次散射模型為了更細致地描述不同森林地物的散射特性,近年來國際上諸多學者主要專注于精細化體散射模型的研究[46,47]。相對而言,對表征建筑物等人造目標的精細化散射模型的研究較少。傳統方法假設二次散射和奇次散射等描述人造目標的模型沒有交叉極化分量,無法描述人造目標通過極化基變換而引入的交叉極化能量,這是傳統方法存在解譯性能不足的本質原因之一。當前,對人造目標(如建筑物、車輛等)的成像和解譯是極化SAR偵察、遙感領域的研究重點。基于物理散射模型的極化目標分解是常用的解譯方法。由于散射模型自身的局限,結合方位向補償處理的傳統極化目標分解方法仍難以從本質上刻畫傾斜排列建筑物等人造目標產生的交叉極化分量。當目標極化方位角較大時,機理誤判問題依然嚴重。2013年,文獻[43]研究揭示了傳統基于模型的目標分解方法在解譯人造目標時的性能極限,即:當人造目標極化方位角絕對值>π/8時,傳統方法將產生機理誤判,且隨極化方位角增大而增大[43]。
在此基礎上,2014年,文獻[17]提出了精細化的二次和奇次散射模型。二次散射分量通常由二面角散射體結構(如“墻體-地面”)進行建模。不同的散射面可以由具有不同介電常數的材料構成。為有效表征傾斜排列建筑物等人造目標形成的二面角結構,通過引入表征二次散射取向角的旋轉角參數θdbl,可得到精細化二次散射模型[17]

其中,Tdbl為傳統二次散射模型。
奇次散射模型通常由面散射機理表征。對具有較小粗糙度的Bragg面散射,交叉極化分量通常可以忽略。為描述起伏地表通過極化基旋轉變換引入較為顯著交叉極化分量的情形,通過引入表征面散射取向角的旋轉角參數θodd,可得到精細化奇次散射模型[17]
其中,Todd為傳統奇次散射模型。
可以看到,相比于傳統模型式(13)和式(14),精細化的二次散射模型式(19)和奇次散射模型式(20)對交叉極化項T33和副對角線項 T13和T23都進行了有效表征,利用了完整的極化信息。因此,相比于不斷增加散射分量以期利用完整極化信息的思路[37,38],建立精細化散射模型的方法更具有吸引力。
此外,為有效表征二次散射和奇次散射產生的交叉極化能量,文獻[47-49]也先后提出了多種改進的二次散射和奇次散射模型。這些模型主要通過引入經驗性的參數來表征二次散射和奇次散射產生的交叉極化能量。由于缺乏清晰的物理含義,這些經驗性模型的適用范圍比較有限。
(6)模型全參數優化求解
在模型參數求解方面,大部分基于模型的極化目標分解方法均采用Freeman-Durden三分量分解的分步求解思路,即首先求取體散射分量,然后根據判決門限,求取二次散射分量或奇次散射分量。對于Yamaguchi四分量分解,則首先求取螺旋散射分量,然后再求取體散射分量,最后求取二次散射分量或奇次散射分量。分步求解方法的優點是效率高,其得以實現的隱含前提是極化相干矩陣T的某些元素僅有一種散射模型有非零取值。比如,在Freeman-Durden三分量分解中,只有體散射模型有交叉極化項T33;在Yamaguchi四分量分解中,只有螺旋散射模型有T23虛部項。此外,分步求解方法仍存在以下值得商榷的問題:(a)求解過程中隱含螺旋散射模型和體散射模型具有更高的優先級,即幾乎所有目標均會產生螺旋散射機理或體散射機理;(b)求解過程中包含多個人為設定的硬判決,容易導致分解結果不穩定;(c)求解過程中存在負能量,并通過強制置零進行處理。盡管采用非負特征值約束值可以避免負能量現象,但沒有解決解空間中最優值的確定問題。
針對上述問題,文獻[17,50]分別提出了以剩余矩陣Tresidual最小化為目標的模型全參數優化求解方法,即利用最優化原理實現模型所有參數的同時最優求解,從而克服分步求解方法存在的問題。以提出的廣義極化目標分解[17]為例,對測量得到的極化相干矩陣T,結合精細化二次和奇次散射模型,其分解框架為

廣義極化目標分解框架中可以包含任意的散射模型。剩余矩陣Tresidual用于衡量這些模型與觀測值的匹配程度。剩余矩陣越小,則模型能更好地匹配測量值。因此,剩余矩陣的最小化可以作為模型全參數求解的優化準則,即

其中,∥Tresidual∥2是Tresidual的2-范數。
由于極化相干矩陣為Hermitian矩陣,因此只需要利用上三角元素進行求解。同時,在上述廣義極化目標分解框架下,精細化的二次和奇次散射模型已經對目標方位取向等屬性進行了建模。因此,不需要對觀測數據做方位向補償處理,體現了該框架的普適性。模型全參數優化求解的不足之處在于計算效率不高。針對這一問題,近期也提出了一種快速的廣義極化目標分解方法[51],并在不斷進行完善。
(7)其它改進方法
除上述研究進展外,其它一些具有代表性的改進方法還包括:引入矩陣酉變換的分解方法[52-54]、引入特征值分解的混合分解方法[55,56]、修正散射對稱性假設的分解方法[57,58]、引入干涉信息的分解方法[59]、極化各向異性分解[60]等,在此不再一一贅述。
利用機載Pi-SAR系統在日本仙臺城區獲取的X波段極化SAR數據對比了Yamaguchi四分量分解[37]、結合方位向補償處理的Yamaguchi四分量分解[22]和廣義極化目標分解[17]等方法。對比實驗結果如圖1所示。可以看到Yamaguchi方法能夠正確將取向平行于極化SAR飛行方向的建筑物解譯為人造目標散射機理(主二次散射或主奇次散射機理),在合成的RGB圖(紅色代表二次散射,綠色代表體散射,藍色代表奇次散射)中呈現為紅色或紫色。然而,對于取向不平行于極化SAR飛行方向的其它建筑物,則呈現為明顯的主體散射機理(綠色)。主體散射機理主要表征森林等植被目標,因此傳統方法存在嚴重的解譯失真。廣義極化目標分解方法則取得了顯著提升的性能,能夠正確解譯具有不同取向的建筑物目標,為后續目標檢測識別奠定基礎[17]。
2.3 極化旋轉域解譯的研究進展[8-10,12]

圖1 建筑物目標極化分解結果Fig.1 Polarimetric decomposition results from a built-up area
雷達目標的后向散射敏感于目標姿態與雷達視線的相對幾何關系,即目標存在散射多樣性。對同一目標,當其相對于雷達視線的姿態不同時,其極化散射特性可能顯著不同;對不同目標,在特定姿態下,也可能表現出極為相似的極化散射特性。雷達目標的散射多樣性給成像雷達目標信息處理與應用造成諸多不便,是當前雷達目標散射機理精細解譯和定量應用面臨的主要技術瓶頸之一[8,18]。另一方面,雷達目標的散射多樣性中也蘊含了目標的豐富信息。對雷達目標的散射多樣性進行有效挖掘和利用,能夠給目標散射機理解譯與應用帶來新的研究思路。因此,在繞雷達視線方向提出了極化旋轉域的概念,將特定幾何關系下獲得的目標極化散射信息拓展到繞雷達視線的旋轉域。在此基礎上,提出了統一的極化矩陣旋轉理論[10]和極化相干/相關特征旋轉域可視化解譯工具[9],并進一步導出了一系列具有明確物理意義的極化特征量,并應用于人造目標增強與檢測[61]、地物辨識與分類[62,63]、災害評估[64]等。
2.3.1 統一的極化矩陣旋轉理論
相較于試圖消除目標散射多樣性影響的研究思路,文獻[10,12]將特定幾何觀測條件下獲取的目標極化矩陣拓展到繞雷達視線的旋轉域,并建立了極化矩陣在旋轉域的解析表達式,進而導出了一系列極化振蕩參數集和極化角參數集。在此基礎上,建立了在極化旋轉域解譯目標散射機理的方法,為雷達目標散射機理解譯提供了新思路。
以極化相干矩陣為例,通過數學變換可以發現,極化旋轉域中極化相干矩陣T(θ)各元素均可統一地由一個正弦函數進行表征

其中,A是振蕩幅度,B是振蕩中心,ω是角頻率,θ0是初始角參數。
這樣,T(θ)的每個元素均可由導出的參數集{A,B,ω,θ0}進行完整表征,由此可建立極化相干矩陣在極化旋轉域的統一表達式。極化相干矩陣在極化旋轉域的主要機理效應表現為各元素的振蕩起伏。因此,導出的參數集{A,B,ω,θ0}稱為振蕩參數。
本質上講,這些振蕩參數直接與目標旋轉域極化散射特性相聯系,具備表征地物散射特性的潛能。旋轉域極化相干矩陣的元素項可以分為5組:(1)Re[T12(θ)]和 Re[T13(θ)];(2)Im[T12(θ)]和 Im[T13(θ)];(3)Re[T23(θ)],T22(θ)和T33(θ);(4)|T12(θ)|2和|T13(θ)|2;(5)|T23(θ)|2。同組內的元素,得到的振蕩參數集{A,B,ω,θ0}包含等價的信息或者振蕩參數是相同的。此外,由極化旋轉域還可導出幾組具有優良特性的旋轉域角參數,包括:1)不動角參數θsta,使對應的矩陣元素在旋轉前后保持不變的非零旋轉角,即f(θsta)=f(0);2)最小化和最大化角參數和θmax,使對應的矩陣元素在旋轉域實現最小化和最大化,即f(θmin)=?A+B和f(θmax)=A+B;3)零角參數θnul,使矩陣對應元素為零的旋轉角,即f(θnul)=0。特別地,零角參數θnul_Re[T12]和θnul_Im[T12]能夠表征目標散射對稱性條件、共極化通道能量的相對大小和共極化分量的相位差等關鍵信息,其取值具有明確的物理意義。
利用機載UAVSAR在加拿大馬尼托巴地區所獲取的L波段極化SAR數據,驗證導出的旋轉域零角參數在地物辨識方面的性能。該研究區域包含多種不同類別的農作物。極化SAR數據由SimiTest方法[65]進行相干斑濾波預處理。對常用的旋轉不變特征——極化熵H、平均角參數、極化反熵Ani和總功率SPAN,以及從極化旋轉域導出的零角參數θnul_Re[T12]和θnul_Im[T12]開展性能對比分析,如圖2所示。可以看到,相比于4個常用旋轉不變特征,這兩個零角參數能夠更靈敏地表征不同目標的散射差異(如橢圓框所示區域),并在目標分類等領域獲得了實際的應用驗證[10,13-15,63,66]。
2.3.2 極化相干/相關方向圖解譯工具

圖2 基于UAVSAR數據的極化特征對比Fig.2 Comparisons of polarimetric features using UAVSAR
極化SAR不同極化通道間的極化相干特征是一種常用的極化特征量,在目標檢測、分類等領域得到應用。目前,對極化相干特征的有效利用仍存在兩方面的局限。首先,極化相干特征十分敏感于目標的姿態。以建筑物為例,極化相干特征的取值嚴重依賴于建筑物取向與極化SAR飛行方向的相對關系。當二者平行時,極化相干特征取值趨近于1;當二者有較大夾角時,極化相干特征取值惡化,遠低于1。其次,對具有散射對稱性的自然地物,極化相干特征的取值較小,趨近于0,難以實際應用。為解決上述問題,文獻[9]發展了一種極化相干特征旋轉域解譯與表征方法。該方法的核心思想是將特定姿態下的極化相干特征拓展到繞雷達視線的極化旋轉域,通過可視化處理和參數化表征,完整地描述目標極化相干特征在旋轉域中的特性。
對任意極化通道sX和sY,傳統的極化相干特征為

將極化相干特征拓展到極化旋轉域,可得

極化相干特征的值域為(0,1)。在極化相干特征基礎上,若不考慮極化通道的歸一化,則可得到旋轉域極化相關特征,為

極化相關特征相比于極化相干特征有更大的動態范圍,其值域為(0,+∞)。將極化相干特征和極化相關特征按旋轉角θ在極坐標系中表征,可分別得到旋轉域極化相干方向圖和極化相關方向圖,實現可視化表征,如圖3所示。
以旋轉域極化相關方向圖可視化解譯工具為例,可以定義以下特征量進行表征:









其中,|,α為調節因子,通常取α=0.95且θ′′ >>θ′。max{·}為求最大值;min{·}為求最小值;mean{·}為求均值;std{·}為求標準差。
下面將結合極化SAR實測數據,介紹上述極化解譯識別方法和導出的極化特征量的一些典型應用。
3 結合極化解譯識別進展的典型應用研究
本節介紹利用近期提出的幾種極化解譯識別技術開展的極化SAR應用研究,主要包括艦船檢測、地物分類和損毀評估3個方面。
3.1 艦船極化檢測研究[67]
極化旋轉域導出的特征中包含著豐富的目標極化信息,通過極化特征優選處理并構造目標檢測方法,可用于極化SAR艦船目標檢測。其中,極化相關方向圖特征相較于極化相干方向圖特征有更大的動態范圍,具有更好區分艦船目標和海雜波背景的潛能,因此選取極化相關方向圖特征用于艦船檢測。首先,結合目標雜波比(Target-to-Clutter Ratio,TCR)對極化相關方向圖特征進行分析和優選。極化SAR數據可由Lexicographic矢量kL=[SHH和Pauli 矢量kP=SHH?SVV2SHV]T表征,選取矢量中兩兩元素組合可構造6個極化相關方向圖。其中,對相互獨立的極化相關方向圖和進行分析。
利用實測極化SAR數據,分別選取10個包含艦船目標的區域和10個雜波區域,得到的極化相關方向圖特征的TCR均值如圖4所示。從左到右四欄分別代表極化相關方向圖和導出的特征。由于導出的角度特征與其他特征的量綱不同,以后將單獨考察。
從圖4可得,極化相關方向圖特征的TCR基本都遠大于1。其中TCR最高的3 個特征為和基于上述3個極化相關方向圖特征,結合門限處理和形態學濾波等處理,可構建極化SAR艦船目標檢測方法。
選用經典的SO-CFAR方法[68]和新近提出的結合超像素的顯著性檢測方法[69](記為Saliency方法)作為對比方法,并利用高分三號極化SAR數據開展艦船目標檢測研究。該數據的標稱分辨率為8 m,成像時間是2017年3月15日,成像區域為中國香港海域。數據大小為3450×2150像素,共包含242只艦船。高分三號數據的Pauli RGB圖和艦船目標真值圖如圖5所示。利用品質因數(Figure of Merit,FoM)來定量分析不同方法的性能,其表達式為

其中,NC,NFA和NM分別代表正確檢測數、虛警數和漏檢數。
利用高分三號極化SAR數據的艦船目標定量檢測結果如表1所示。相較于對比方法,基于和這3個特征的檢測方法品質因數更高,檢測性能更佳。其中,TCR最高的品質因數最高,達到97.13%。對比分析驗證了極化旋轉域解譯方法的有效性。
3.2 地物極化分類研究[66]
地物分類是極化SAR圖像處理的重要應用之一,在農作物生長監視、城區測繪以及環境監測等領域具有基礎性作用。在農作物生長監視和產量估計等應用中,通常會利用同一觀測區域的多時相極化SAR數據。然而,由于在多時相數據獲取期間農作物的生長變化,發展具有較強穩健性及較好泛化性的分類方法仍面臨挑戰。
近年來,以卷積神經網絡(Conventional Neural Network,CNN)為代表的深度學習算法在自然圖像處理,特別是分類識別應用上取得了突破性進展。其中,CNN模型的多層結構能夠提取輸入數據的深層抽象特征,而這類特征對于不同類別具有較強區分能力。基于CNN模型的基本模塊,文獻[66]提出一種用于多時相極化SAR地物分類的CNN模型,如圖6所示。在此基礎上,建立了一種極化特征驅動的CNN分類器,其核心思想即是將極化SAR散射機理解譯知識與CNN模型結合,以優選極化特征驅動CNN分類器。所用優選極化特征包括四個經典旋轉不變特征(極化熵H、平均角參數、極化反熵Ani和總功率SPAN)和兩個旋轉域零角特征()。該分類方法簡稱為Selected Features+CNN (SF+CNN)。同時,與上述方法進行對比的是直接以極化相干矩陣之中九個元素項作為輸入的CNN分類方法,簡稱為T3+CNN。

圖5 高分三號數據Fig.5 GaoFen-3 data
美國NASA/JPL實驗室的機載UAVSAR系統在加拿大馬尼托巴地區獲取了一批L波段多時相極化SAR數據。利用其中的3個多時相極化SAR數據開展多時相地物分類實驗,3組數據分別獲取于2012年6月17日(Day of the Year,DoY 169)、6月22日(DoY 174)和6月23日(DoY 175)。在預處理階段,上述3個時相的極化SAR數據均以DoY 169數據為基準進行配準處理,且均使用SimiTest方法[65]進行相干斑濾波處理。濾波后3個時相極化SAR數據的Pauli RGB圖如圖7(a)—圖7(c)所示。相應研究區域內包含有多種不同類別地物。真值圖如圖7(d)所示,包括:闊葉林、草料、大豆、玉米、小麥、油菜籽以及燕麥等。從圖7可以觀察到因農作物生長而引起的不同時相數據之間的變化。
在對比實驗中,為了驗證CNN分類器的泛化性能,僅從DoY 169和DoY 175兩個時相的數據中提取訓練樣本用于訓練CNN分類器。這樣,相對而言,DoY 174時相的數據對于訓練好的CNN分類器是全新的。對比實驗中訓練率分別設置為1%,5%以及10%。此外,除輸入特征不同外,兩種對比方法的其它參數保持一致。在不同訓練率下得到的分類結果如表2所示。對于訓練所用的DoY 169和DoY 175兩個時相,SF+CNN與T3+CNN兩種方法得到的分類性能相當,總體分類精度(Overall Accuracy,OA)高,且穩定在98.34%至99.54%之間。兩種分類方法的性能差異主要體現在沒有訓練數據的DoY 174這一時相。對DoY 174時相,SF+CNN方法明顯優于T3+CNN,在3種訓練率下均能夠得到更高的OA,分別為98.69%,98.11%和97.04%。相較于T3+CNN方法,SF+CNN方法得到的OA平均提升了4.86%,且接近于有樣本用于訓練的兩個時相的分類精度。因此,散射機理解譯知識與深度學習技術的結合確實能夠提升多時相極化SAR地物分類的精度及泛化性能。

表1 高分三號極化SAR艦船目標檢測結果Tab.1 Ship detection results with GaoFen-3 data

圖6 提出的分類器Fig.6 The proposed classifier architecture
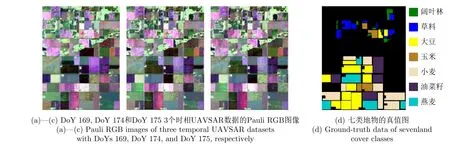
圖7 相干斑濾波處理后的多時相UAVSAR數據及真值圖Fig.7 Multi-temporal UAVSAR datasets with speckle reduction and the ground-truth data
3.3 建筑物損毀評估研究[8,11,64,70]
對建筑物等高價值目標的損毀精細評估,在打擊效果評估、減災防災等領域有著重要需求。近年來,具有較大破壞力的地震等自然災害頻發,快速準確確定災害的空間分布和損毀程度,是制定救援計劃、減輕損失的關鍵。建筑物損毀直接關系人員傷亡和經濟損失,成為災后救援和重建的主要研究對象。建筑物在損毀前后對電磁波的響應和極化調制機理是明顯不同的。極化特征量能夠表征目標固有的結構屬性和散射特性,基本不受時間/空間基線等影響,具有更穩健的性能。在此基礎上,文獻[8,11,64,70]提出了多種基于散射機理分析的廣域建筑物倒損率快速準確定量估計方法,通過構建敏感于建筑物倒損率的極化倒損因子,實現對廣域建筑物倒損率的精細定量反演。
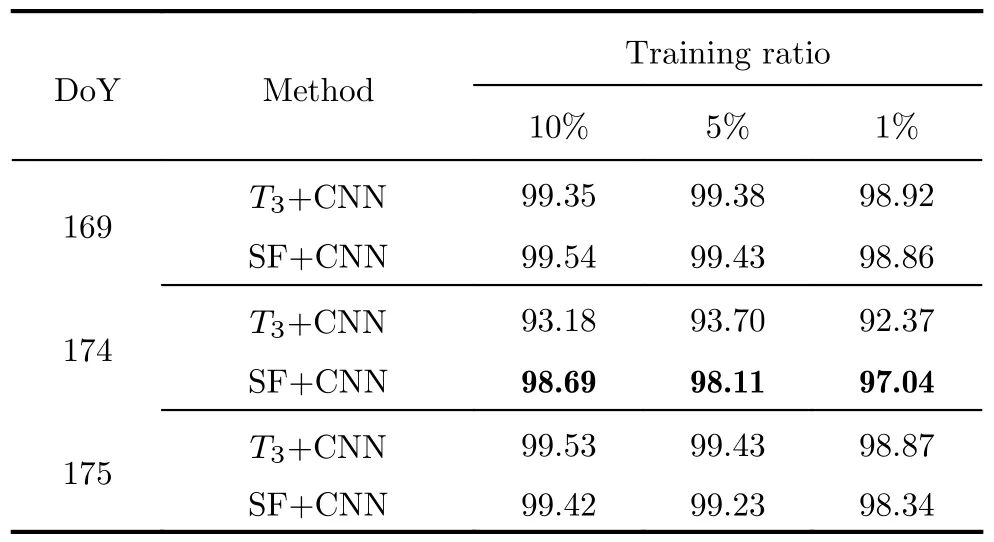
表2 UAVSAR極化SAR地物分類的總體分類精度(%)Tab.2 The OAs of polarimetric SAR land cover classification results with UAVSAR data (%)
本節介紹一種利用極化目標分解的建筑物倒損率估計方法[64]。建筑物的倒損會導致“地面-墻體”二面角結構的減少。建筑物倒損前后散射機理的主要變化是由主二次散射機理變為主奇次散射機理,如圖8所示。精細化目標分解方法能夠準確提取建筑物區域的各散射分量。減少的主二次散射分量直接與損毀的“地面-墻體”二面角結構的數量密切相關。這樣,面向多時相極化SAR數據,倒損前后主二次散射分量貢獻的比值即可作為建筑物倒損的極化評估因子,為

其中,(DominantPd)pre和(DominantPd)post分別為損毀前后主二次散射分量。
根據目標極化散射解譯理論,RatioPd取值越低,則“地面-墻體”結構減少越多,建筑物倒損率越高。因此,建立的建筑物倒損率反演表達式為

其中,DL為建筑物倒損率,k和b為反演參數,且k <0。當RatioPd=0時,“地面-墻體”全部損毀,對應的倒損率為DL=1;當RatioPd=1時,“地面-墻體”結構沒有損毀,對應的倒損率為DL=0。因此,可得到k=?1和b=1。
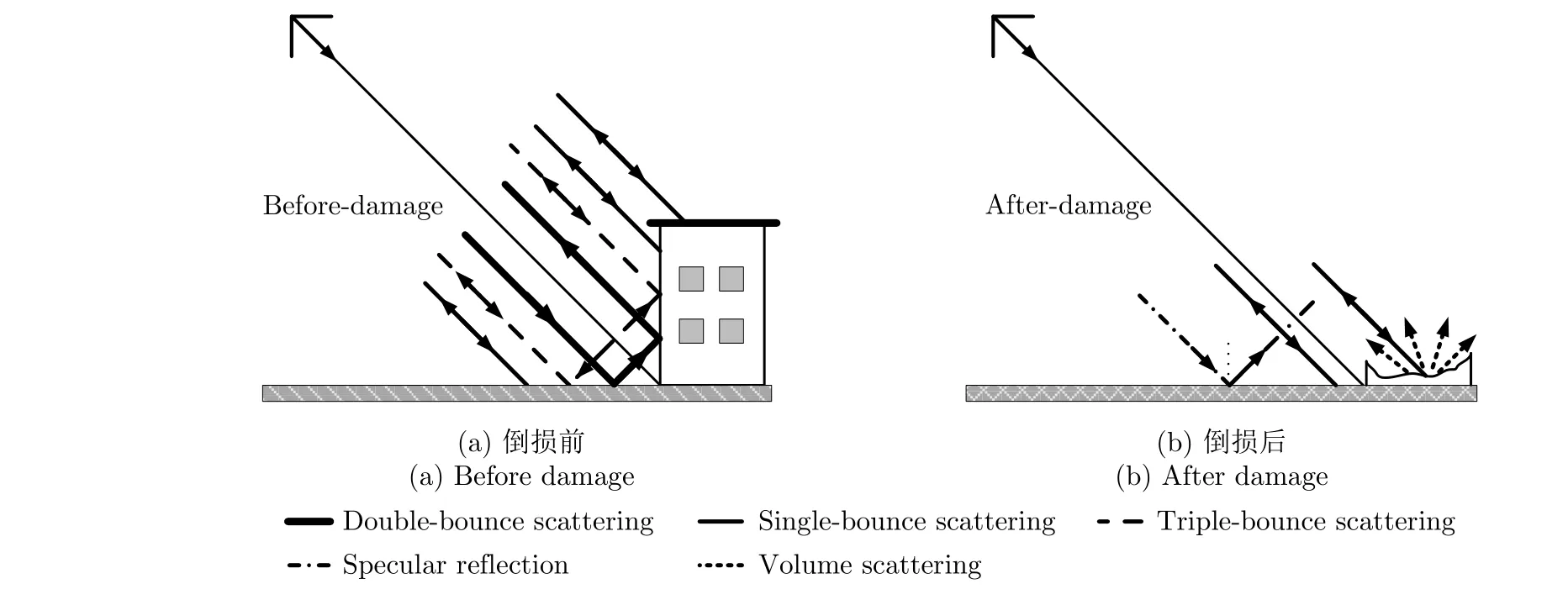
圖8 建筑物倒損前后極化散射機理變化示意圖Fig.8 Illustration of the changes of the polarimetric scattering mechanisms
利用建筑物極化倒損評估因子式(38)和反演表達式(39),建立了廣域建筑物損毀精細定量評估方法。結合星載ALOS/PALSAR多時相極化SAR數據,對2011年3月11日東日本大地震中受損嚴重的宮城縣開展了廣域建筑物倒損率精細定量估計研究,結果如圖9所示。與真值數據對比可以看到,上述方法能夠準確檢測損毀建筑物區域,并且能夠準確估計建筑物區域的倒損率,為災害評估和災后救援提供重要的決策信息。
4 總結與展望
具備極化測量能力的成像雷達在偵察監視、精確打擊、對地觀測、環境遙感等領域得到越來越廣泛的應用。雷達目標極化散射精細建模與解譯是該領域的基礎性科學問題,是連接極化成像雷達數據和實際應用的橋梁。面向極化成像雷達目標解譯識別的研究前沿和挑戰,我們預期以下方面在未來一個時期值得重點關注。
(1)極化散射建模與解譯的定量評估
以基于散射模型的極化目標分解為例,國內外已經提出了大量的模型和方法。2014年,文獻[18]提出從假設條件的合理性(包括:散射對稱性假設、模型優先級假設、模型求解假設等)、是否出現負能量、是否完整利用極化信息和計算效率等維度,并結合一些具有明確散射特性的典型目標,定性和綜合評估各種極化目標分解方法的性能。近年來,也有學者從其它角度開展了極化目標分解方法的評估研究[71,72]。然而,如何建立具有普適性的定量評估方法仍然是當前面臨的難題,值得繼續深入研究。
(2)超高分辨率成像雷達極化信息處理
當前,國內外已有多部機載極化SAR系統具備了亞米分辨率成像模式。其中,德國的MEMPHIS系統具備圓極化測量能力,并可到達6 cm的超高成像分辨率。我國也有多部機載極化SAR系統具備了亞米級的成像分辨率。與此同時,在機載系統里獲得成功實踐的亞米超高分辨模式也在快速向星載系統部署實施。具備超高分辨率成像模式是極化SAR系統發展的重要方向。成像分辨率的極大提升,在獲取目標更豐富細節信息的同時,也給極化SAR目標理解與解譯帶來了新的科學問題和技術挑戰。針對超高分辨率極化SAR,發展面向目標對象的散射建模、深度解譯與準確表征的理論與工具具有重要的研究意義和應用價值。
(3)多模式成像雷達極化信息處理
隨著雷達成像技術和雷達極化技術的發展進步,多視角SAR、雙站SAR、層析SAR、圓跡SAR、全息SAR、視頻SAR、MIMO-SAR等多模式成像雷達都已經或逐步具備全極化測量能力[3,73-76]。總體而言,針對這些多模式新體制成像雷達的極化信息處理研究仍處于起步階段,具有非常廣闊的發展空間。此外,針對提升測繪幅寬而發展起來的混合極化SAR或簡縮極化SAR[77],發展相應的極化信息處理方法也是值得研究的重要方向。
(4)雷達目標散射解譯與人工智能
以深度學習為代表的人工智能算法在諸多領域獲得了極為成功的應用,并已拓展應用于成像雷達目標檢測、分類與識別等方面。與此同時,人工智能算法的脆弱性和可欺騙性也在不斷暴露。更進一步地,雷達目標圖像與照片、光學等圖像有著顯著差異,如何提升人工智能算法在成像雷達領域的健壯性、泛化性是值得深入研究的重要課題。其中,開展融合雷達目標散射解譯的人工智能方法研究,有望成為一條可行的途徑。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
