雙層環(huán)形桁架可展天線機(jī)構(gòu)運(yùn)動(dòng)特性與動(dòng)力學(xué)分析
2020-05-20 01:24:44韓博許允斗姚建濤鄭東李永杰趙永生
兵工學(xué)報(bào) 2020年4期
韓博, 許允斗,2, 姚建濤,2, 鄭東, 李永杰, 趙永生,2
(1.燕山大學(xué) 河北省并聯(lián)機(jī)器人與機(jī)電系統(tǒng)實(shí)驗(yàn)室, 河北 秦皇島 066004;2.燕山大學(xué) 先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實(shí)驗(yàn)室, 河北 秦皇島 066004)
0 引言
隨著空間通訊、軍事偵察以及對(duì)地觀測(cè)等各類航天任務(wù)的不斷發(fā)展,宇航空間機(jī)構(gòu)的尺寸越來(lái)越大[1]。由于運(yùn)載火箭有效載荷艙空間有限,空間可展機(jī)構(gòu)這類可以在發(fā)射和運(yùn)載時(shí)收攏、入軌到位后展開的機(jī)構(gòu)在衛(wèi)星平臺(tái)、空間站以及航天飛行器上得到了廣泛應(yīng)用,并逐漸成為航空航天領(lǐng)域的研究熱點(diǎn)之一[2-5]。
空間可展機(jī)構(gòu)在航空航天領(lǐng)域的一個(gè)重要應(yīng)用是作為星載天線的展開與支撐機(jī)構(gòu)[6]。網(wǎng)狀反射面可展天線是星載天線中重要的一類,主要由可展開支撐機(jī)構(gòu)和索網(wǎng)結(jié)構(gòu)張拉形成的反射面構(gòu)成,具有口徑大、收攏率高以及質(zhì)量輕的特點(diǎn),在星載大口徑天線領(lǐng)域得到廣泛應(yīng)用[7]。目前研制成功的大口徑星載空間可展天線類型主要有構(gòu)架式可展天線、環(huán)形桁架式可展天線、伸展肋式可展天線以及環(huán)柱形可展天線等[8-10]。
環(huán)形桁架式可展天線具有收攏率較高以及桁架質(zhì)量較小的特點(diǎn),相較于其他類型,隨著天線口徑的增大其質(zhì)量并不呈比例增加,是空間大口徑和超大口徑天線較為理想的結(jié)構(gòu)形式[11]。美國(guó)NGST公司在2000年研發(fā)的AstroMesh天線是環(huán)形桁架可展開天線在軌應(yīng)用的成功范例,該天線從最初的2.5 m到現(xiàn)在運(yùn)用較多的12.5 m口徑,經(jīng)歷了7代產(chǎn)品升級(jí),并先后在Inmarsat-4系列、Thuraya系列和MBSAT系列衛(wèi)星上成功應(yīng)用[12];由于單層環(huán)形桁架機(jī)構(gòu)在口徑較大時(shí)整體剛度較低,Escrig[13]最早于1985年提出了Pactruss雙層環(huán)形桁架可展機(jī)構(gòu);You等[14]基于剪叉機(jī)構(gòu)采用繩驅(qū)動(dòng)研制了環(huán)形桁架機(jī)構(gòu)樣機(jī);Datashvili等[15]研制成功了口徑為6 m的雙層環(huán)形可展開桁架機(jī)構(gòu)。國(guó)內(nèi)學(xué)者研制了單、雙層環(huán)形桁架可展開天線與四面體構(gòu)架式可展開天線的原理樣機(jī)[16-18];也有學(xué)者分別構(gòu)造了大型可展機(jī)構(gòu)[19-20];史創(chuàng)等[21]提出了曲柄滑塊式平面可展機(jī)構(gòu)單元,并在此基礎(chǔ)上設(shè)計(jì)了單、雙層環(huán)形桁架可展機(jī)構(gòu)并制作了原理樣機(jī)。綜上所述,相關(guān)科研人員在大口徑星載環(huán)形桁架式可展天線領(lǐng)域做了較多研究,但是總體而言,目前在軌運(yùn)行的環(huán)形桁架可展天線機(jī)構(gòu)類型仍然較少。
在空間機(jī)構(gòu)的運(yùn)動(dòng)特性與動(dòng)力學(xué)分析方面,楊毅等[22]分析了一類多面體伸展臂機(jī)構(gòu);Chen等[23]、Shang等[24]和Chen等[25]研究了Bricard和Bennett連桿機(jī)構(gòu)在構(gòu)造空間可展機(jī)構(gòu)時(shí)的運(yùn)動(dòng)特性;Zhao等[26]和李端玲等[27]利用螺旋理論,分別分析了平面型和球面型剪叉機(jī)構(gòu)的運(yùn)動(dòng)特性;Wei等[28]基于螺旋理論和圖論分析了魔術(shù)花球機(jī)構(gòu)的自由度問(wèn)題;Sun等[29-30]基于螺旋理論分別分析了剪叉機(jī)構(gòu)組合單元的自由度、運(yùn)動(dòng)學(xué)以及動(dòng)力學(xué)等問(wèn)題;曲夢(mèng)可等[31]研究了一種輪腿混合機(jī)器人的機(jī)械腿動(dòng)力學(xué)建模問(wèn)題。具體到空間可展開天線機(jī)構(gòu)方面,許允斗等[32]基于螺旋理論,針對(duì)四面體構(gòu)架式可展天線提出了一種拆桿等效的自由度分析方法;齊朝暉等[33]研究了周邊桁架式可展開天線展開運(yùn)動(dòng)學(xué)與控制問(wèn)題;Patel等[34]針對(duì)一種環(huán)狀可展天線機(jī)構(gòu),建立了整體機(jī)構(gòu)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型,并研究了摩擦對(duì)其展開運(yùn)動(dòng)的影響;劉瑞偉等[35]分析了一種大口徑索肋張拉式折展天線的動(dòng)力學(xué)特性問(wèn)題;李團(tuán)結(jié)等[36]研究了周邊桁架可展天線的展開過(guò)程動(dòng)力學(xué)問(wèn)題;彭云等[37]研究了重力對(duì)大型環(huán)形可展天線展開動(dòng)力學(xué)的影響。以上文獻(xiàn)針對(duì)不同類型的空間機(jī)構(gòu)及可展開天線機(jī)構(gòu)進(jìn)行了研究,但由于雙層環(huán)形桁架可展天線機(jī)構(gòu)屬于復(fù)雜的空間多環(huán)耦合機(jī)構(gòu),桿件與運(yùn)動(dòng)副數(shù)量較多,自由度及運(yùn)動(dòng)學(xué)與動(dòng)力學(xué)分析較為困難,目前多采用軟件仿真模擬,難度較大且普適性較低。整體而言,從理論上針對(duì)此類機(jī)構(gòu)進(jìn)行相關(guān)分析的研究較少。
本文提出一種雙層環(huán)形桁架可展天線機(jī)構(gòu),分析了雙層環(huán)形桁架機(jī)構(gòu)的構(gòu)型機(jī)理并進(jìn)行機(jī)構(gòu)分解;基于螺旋理論分析了機(jī)構(gòu)的自由度,并分析了整體機(jī)構(gòu)中各個(gè)構(gòu)件的速度和加速度;基于牛頓- 歐拉方程和虛功原理,建立了整體雙層環(huán)形桁架可展機(jī)構(gòu)的動(dòng)力學(xué)方程,最后進(jìn)行了數(shù)值仿真驗(yàn)證。本文研究旨在豐富大口徑環(huán)形桁架可展天線機(jī)構(gòu)的構(gòu)型,并為此類可展機(jī)構(gòu)的運(yùn)動(dòng)特性和動(dòng)力學(xué)分析提供參考。
1 雙層環(huán)形桁架可展天線機(jī)構(gòu)
雙層環(huán)形桁架可展天線機(jī)構(gòu)如圖1所示,其整體為由連桿鉸接而成的中心對(duì)稱桁架機(jī)構(gòu),主要包括內(nèi)層環(huán)形桁架、外層環(huán)形桁架和多個(gè)內(nèi)外層桁架連接單元,其內(nèi)層環(huán)形桁架和外層環(huán)形桁架均呈環(huán)狀,且各有上下兩個(gè)環(huán)狀桁架機(jī)構(gòu),內(nèi)外層桁架連接單元為剪叉機(jī)構(gòu)單元,整體機(jī)構(gòu)通過(guò)位于節(jié)點(diǎn)處的花盤連接件連接。
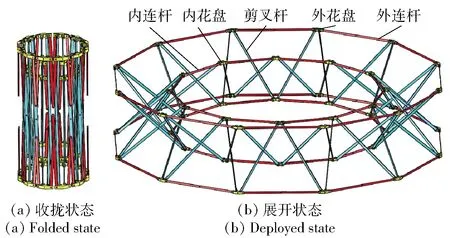
圖1 雙層環(huán)形桁架可展天線機(jī)構(gòu)Fig.1 Double-ring truss deployable mechanism
圖1(a)和圖1(b)分別為雙層環(huán)形桁架可展天線機(jī)構(gòu)的完全收攏狀態(tài)和完全展開狀態(tài),是其收藏運(yùn)輸和在軌工作時(shí)的位形狀態(tài)。在整個(gè)機(jī)構(gòu)的展開或收攏運(yùn)動(dòng)過(guò)程中其將處于半展開狀態(tài)(見圖2(a)),也是它的一般位形狀態(tài)。半展開的內(nèi)層環(huán)形桁架機(jī)構(gòu)和外層環(huán)形桁架機(jī)構(gòu)的結(jié)構(gòu)相同,均由平面3R機(jī)構(gòu)(R代表轉(zhuǎn)動(dòng)副)通過(guò)花盤連接件連接組成,內(nèi)外層環(huán)形桁架通過(guò)中間的剪叉機(jī)構(gòu)單元連接,整體機(jī)構(gòu)中所含運(yùn)動(dòng)副均為轉(zhuǎn)動(dòng)副。對(duì)雙層環(huán)形桁架可展機(jī)構(gòu)進(jìn)行結(jié)構(gòu)分解,可以將其分解為一個(gè)閉環(huán)可展機(jī)構(gòu)單元、多個(gè)非閉環(huán)可展機(jī)構(gòu)單元以及兩個(gè)平面3R機(jī)構(gòu),如圖2(b)所示。

圖2 雙層環(huán)形桁架可展機(jī)構(gòu)半展開狀態(tài)及其結(jié)構(gòu)分解Fig.2 Semi-deployed state of double-ring truss mechanism and its structural decomposition
2 雙層環(huán)形桁架可展機(jī)構(gòu)自由度分析
2.1 閉環(huán)可展機(jī)構(gòu)單元自由度分析
針對(duì)閉環(huán)可展機(jī)構(gòu)單元建立空間笛卡爾坐標(biāo)系,如圖3所示,坐標(biāo)系原點(diǎn)O位于底部花盤連接件中心位置處,X軸由底部原點(diǎn)處的花盤連接件指向另一個(gè)花盤連接件,Z軸豎直向上,Y軸由右手定則確定。圖3中:大寫字母A~F表示各花盤連接件編號(hào),l為剪叉桿上與內(nèi)層花盤連接件相連的一段長(zhǎng)度,L為與外層花盤連接件相連的一段長(zhǎng)度,q為外層花盤連接件之間連接的兩個(gè)連桿長(zhǎng)度q;α為剪叉桿在OXY平面上的投影與Y軸的夾角,θ為相連兩個(gè)剪叉桿之間的夾角,β為外層花盤之間連接的連桿與X軸的夾角。
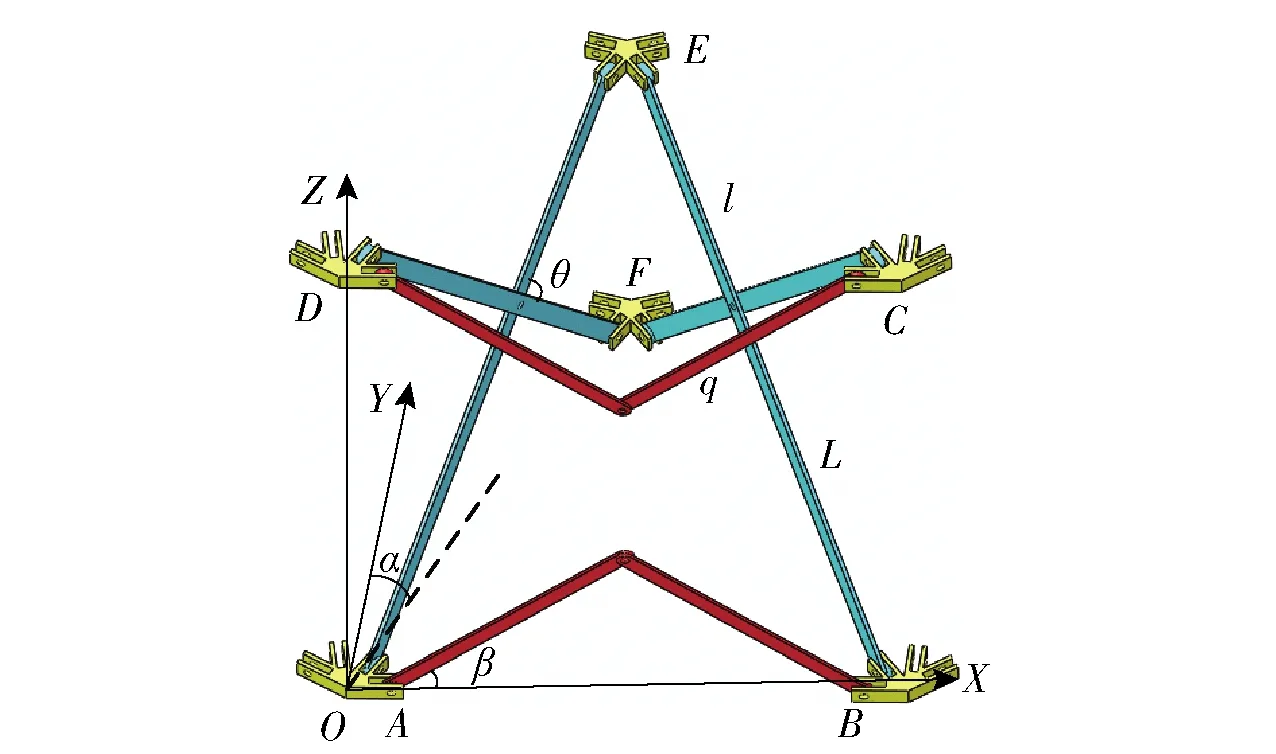
圖3 閉環(huán)可展機(jī)構(gòu)單元及坐標(biāo)系Fig.3 Closed loop deployable mechanism unit and coordinate system
設(shè)定內(nèi)層花盤連接件上各轉(zhuǎn)動(dòng)副軸線與中心的距離為m,外層花盤連接件上各轉(zhuǎn)動(dòng)副軸線與中心的距離為n,在圖3中各參數(shù)之間關(guān)系為
(1)
圖3中,桿件編號(hào)用兩兩連接的花盤連接件編號(hào)表示,如花盤A和花盤E之間的剪叉桿編號(hào)為AE,花盤C和花盤D之間連接的兩個(gè)連桿編號(hào)分別為CD1和CD2, 其他構(gòu)件命名規(guī)則相同。基于圖論和螺旋理論,用圓圈表示構(gòu)件,用線條表示運(yùn)動(dòng)副,用帶數(shù)字的運(yùn)動(dòng)旋量表示不同關(guān)節(jié)處的運(yùn)動(dòng),如用$2表示連接桿件AE和DF轉(zhuǎn)動(dòng)副的運(yùn)動(dòng),可以得到閉環(huán)可展開機(jī)構(gòu)單元的旋量約束拓?fù)鋱D,如圖4所示。
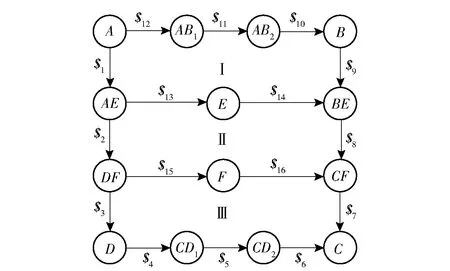
圖4 閉環(huán)可展開機(jī)構(gòu)單元旋量約束拓?fù)鋱DFig.4 Screw constraint topology of closed loop deployable mechanism unit
由連接桿件AB1和桿件AB2的轉(zhuǎn)動(dòng)副11空間位置坐標(biāo),可得
(2)
式中:r11表示轉(zhuǎn)動(dòng)副11的空間位置;n為花盤尺寸。
轉(zhuǎn)動(dòng)副11的轉(zhuǎn)軸所在軸線方向矢量為
(3)
根據(jù)螺旋理論,可以得到轉(zhuǎn)動(dòng)副11的運(yùn)動(dòng)螺旋,其單位螺旋表達(dá)式為
(4)
同理可以得到圖4中所示其他運(yùn)動(dòng)螺旋的表達(dá)式。用ω表示相應(yīng)轉(zhuǎn)動(dòng)副的角速度,針對(duì)圖4中的Ⅰ~Ⅲ 3個(gè)閉環(huán),建立相應(yīng)的旋量約束方程,可得閉環(huán)可展機(jī)構(gòu)單元對(duì)應(yīng)的旋量約束方程組為
(5)
式中:ωi為機(jī)構(gòu)單元中轉(zhuǎn)動(dòng)副i的角速度量;0是六維零向量。
將(5)式寫成矩陣的形式:
MN=0,
(6)
式中:
(7)
(8)
(9)
旋量約束矩陣M是一個(gè)18×16維矩陣,閉環(huán)可展開機(jī)構(gòu)單元的自由度數(shù)對(duì)應(yīng)于旋量約束矩陣的零空間維數(shù),通過(guò)數(shù)值計(jì)算軟件MATLAB計(jì)算,可得
rank(M)=15.
(10)
旋量約束矩陣M的列數(shù)為16,其零空間的維數(shù)為列數(shù)減去秩,因此可以得到閉環(huán)可展開機(jī)構(gòu)單元的自由度數(shù)為1.
2.2 單元組合機(jī)構(gòu)及雙層環(huán)形桁架機(jī)構(gòu)自由度分析
雙層環(huán)形桁架可展機(jī)構(gòu)可以分解為一個(gè)閉環(huán)可展機(jī)構(gòu)單元、多個(gè)非閉環(huán)可展機(jī)構(gòu)單元以及兩個(gè)平面3R機(jī)構(gòu)。由圖2可以看出,非閉環(huán)可展機(jī)構(gòu)單元包含構(gòu)型相同的兩種類型,區(qū)別僅為構(gòu)件尺寸不同,由于構(gòu)件尺寸不影響機(jī)構(gòu)自由度,故在分析整體自由度時(shí),可以對(duì)非閉環(huán)可展機(jī)構(gòu)單元做統(tǒng)一處理。在圖3所示的閉環(huán)可展機(jī)構(gòu)單元基礎(chǔ)上進(jìn)行機(jī)構(gòu)組合,組合一個(gè)非閉環(huán)可展機(jī)構(gòu)單元,如圖5所示。
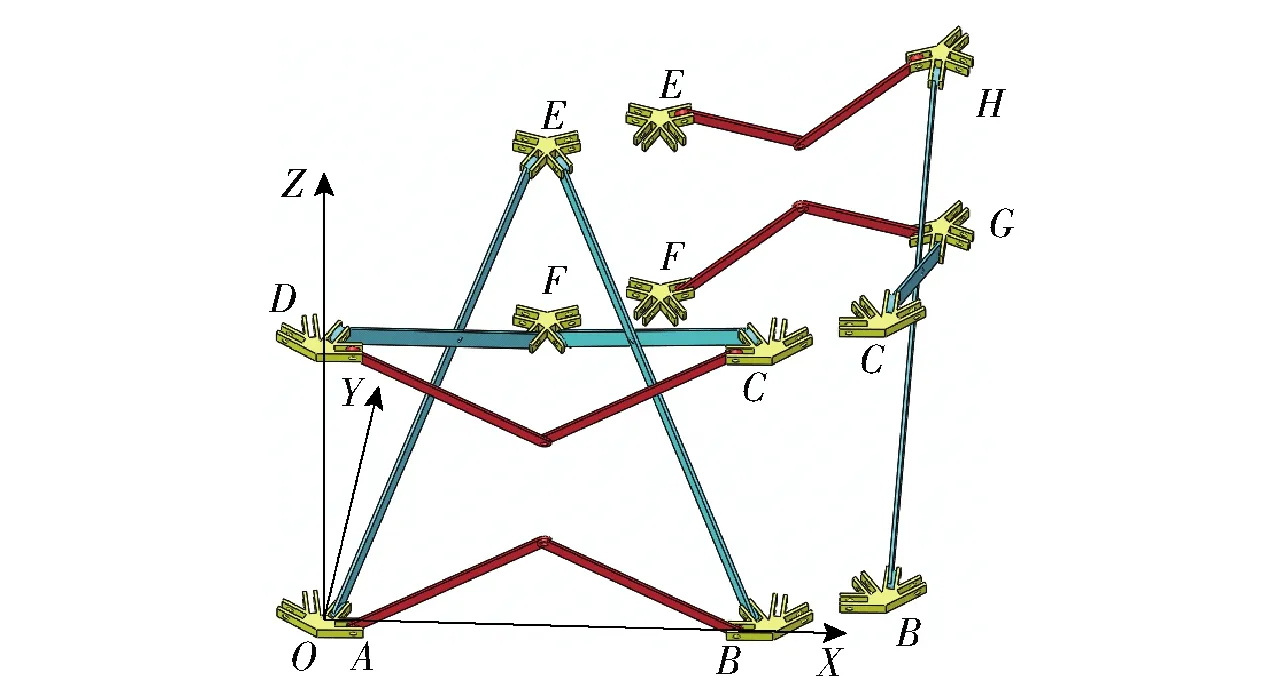
圖5 單元組合機(jī)構(gòu)及坐標(biāo)系Fig.5 Unit combination mechanism and coordinate system
圖5中,左側(cè)的閉環(huán)可展機(jī)構(gòu)單元與坐標(biāo)系即為圖3中的機(jī)構(gòu)單元及坐標(biāo)系,同樣用大寫字母對(duì)右側(cè)機(jī)構(gòu)單元的花盤連接件進(jìn)行編號(hào),桿件及運(yùn)動(dòng)副的編號(hào)規(guī)則同2.1節(jié),可以得到圖5中非閉環(huán)可展機(jī)構(gòu)單元的旋量約束拓?fù)鋱D,如圖6所示。
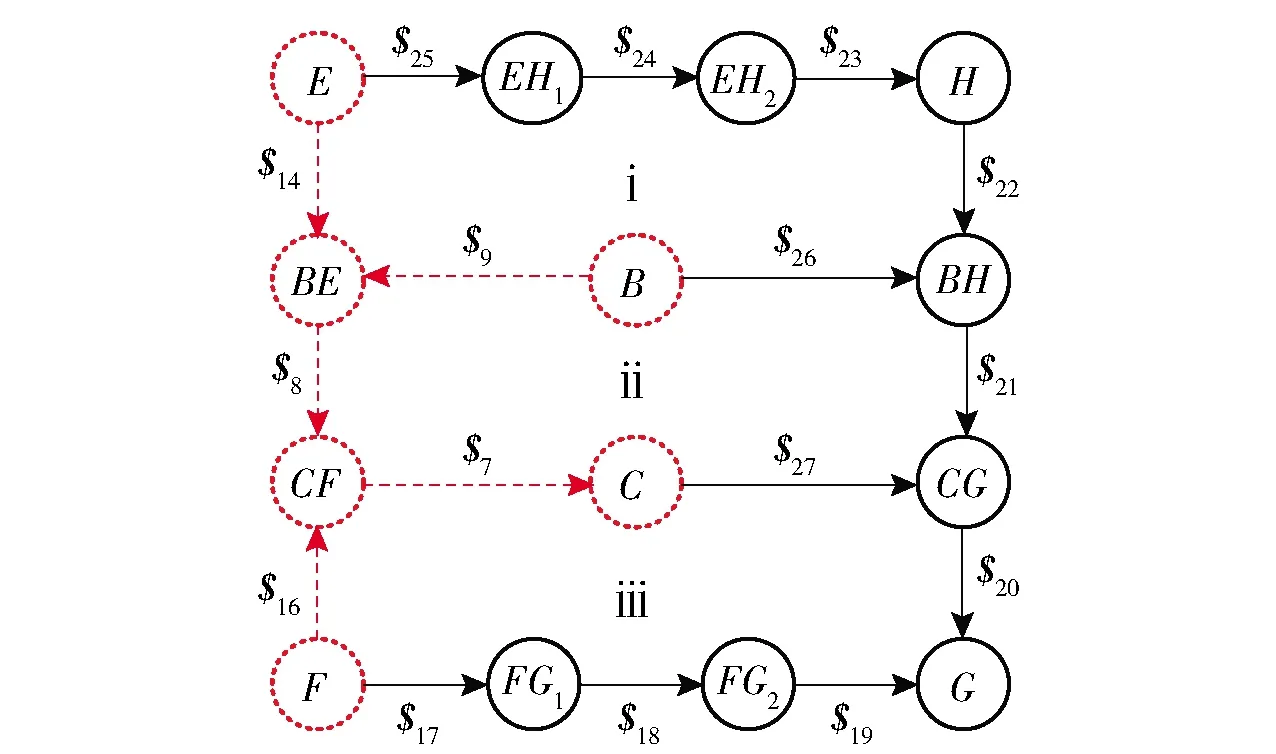
圖6 非閉環(huán)可展機(jī)構(gòu)單元旋量約束拓?fù)鋱DFig.6 Screw constraint topology of non-closed loop deployable mechanism unit
針對(duì)圖6中的ⅰ~ⅲ 3個(gè)閉環(huán),建立相應(yīng)的旋量約束方程,可得旋量約束方程組為
(11)
聯(lián)立(5)式和(11)式,可得單元組合機(jī)構(gòu)的旋量約束方程組為
(12)
(12)式寫成矩陣的形式:
PQ=0,
(13)
式中:
(14)
系數(shù)矩陣P可以容易地通過(guò)(12)式得到。
圖5中,花盤連接件B、C、E、F所連接的剪叉機(jī)構(gòu)及其上所連接的5個(gè)轉(zhuǎn)動(dòng)副為兩個(gè)機(jī)構(gòu)單元所共用,聯(lián)立(5)式和(11)式時(shí),重復(fù)計(jì)算了兩個(gè)機(jī)構(gòu)單元共用的剪叉機(jī)構(gòu)及轉(zhuǎn)動(dòng)副,因此在計(jì)算單元組合機(jī)構(gòu)的自由度時(shí),應(yīng)除去重復(fù)計(jì)算的運(yùn)動(dòng)螺旋,即將$7、$8、$9、$14和$16分別去掉一個(gè),只計(jì)算一次。這里將非閉環(huán)可展機(jī)構(gòu)單元中重復(fù)計(jì)算的運(yùn)動(dòng)螺旋去掉,即圖6中的紅色虛線部分,因此(13)式中的系數(shù)矩陣P可以寫為
(15)
式中:
(16)
(17)
由(15)式可得
rank(P)=rank(M)+rank(M′),
(18)
代入機(jī)構(gòu)參數(shù),可得

(19)
則單元組合機(jī)構(gòu)的自由度為
d=u-rank(P)=27-26=1,
(20)
式中:d為自由度數(shù);u為矩陣的列數(shù)。
由于矩陣M′為列滿秩矩陣,(20)式也可以寫為
d=uM+uM′-rank(M)-rank(M′)= [uM-rank(M)]+[uM′-rank(M′)]=uM-rank(M),
(21)
式中:uM為矩陣M的列數(shù);uM′為矩陣M′的列數(shù)。
由(21)式可以看出,單元組合機(jī)構(gòu)的自由度數(shù)仍然取決于矩陣M,單元組合機(jī)構(gòu)的自由度數(shù)與單個(gè)閉環(huán)可展機(jī)構(gòu)單元的自由度數(shù)相同。
由以上分析可知,當(dāng)在單元組合機(jī)構(gòu)的基礎(chǔ)上繼續(xù)添加非閉環(huán)可展機(jī)構(gòu)單元時(shí),整體機(jī)構(gòu)的自由度仍然與單個(gè)閉環(huán)可展機(jī)構(gòu)單元相同。同理可以分析得到,當(dāng)在單個(gè)閉環(huán)可展機(jī)構(gòu)單元上添加多個(gè)非閉環(huán)可展機(jī)構(gòu)單元以及兩個(gè)平面3R機(jī)構(gòu)形成雙層環(huán)形桁架可展機(jī)構(gòu)時(shí),其整體自由度仍然與單個(gè)閉環(huán)可展機(jī)構(gòu)單元相同,雙層環(huán)形桁架可展機(jī)構(gòu)整體只具有一個(gè)自由度。由于機(jī)構(gòu)中運(yùn)動(dòng)構(gòu)件的運(yùn)動(dòng)自由度數(shù)小于或等于整體機(jī)構(gòu)的自由度數(shù)[38],雙層環(huán)形桁架可展機(jī)構(gòu)中的各個(gè)運(yùn)動(dòng)構(gòu)件也只有一個(gè)運(yùn)動(dòng)自由度。
3 雙層環(huán)形桁架機(jī)構(gòu)速度分析
在進(jìn)行速度分析時(shí),以圖5所示的單元組合機(jī)構(gòu)為基礎(chǔ),對(duì)雙層環(huán)形桁架可展機(jī)構(gòu)進(jìn)行單元?jiǎng)澐郑瑢㈦p層環(huán)形桁架可展機(jī)構(gòu)劃分為多個(gè)相同的單元組合機(jī)構(gòu),相鄰單元組合機(jī)構(gòu)之間共用4個(gè)花盤連接件以及一個(gè)剪叉機(jī)構(gòu),如圖7所示。
圖7 多個(gè)單元組合機(jī)構(gòu)Fig.7 Multi-unit combination mechanism
3.1 單元組合機(jī)構(gòu)速度分析
由2.2節(jié)分析可知,單元組合機(jī)構(gòu)為單自由度機(jī)構(gòu),因此,若給定其中的一個(gè)輸入,如ω1,通過(guò)(12)式中的旋量約束方程組可以解得各個(gè)角速度未知量,進(jìn)而基于單元組合機(jī)構(gòu)的構(gòu)型關(guān)系以及圖4和圖6所示的旋量約束拓?fù)鋱D,通過(guò)旋量運(yùn)算便可以得到各個(gè)構(gòu)件的旋量速度。
在圖4所示的旋量約束拓?fù)鋱D中,閉環(huán)Ⅰ中各個(gè)構(gòu)件的旋量速度為
(22)
式中:VA、VAE、VAB1、VE、VAB2、VB、VBE分別為構(gòu)件A、AE、AB1、E、AB2、B、BE的旋量速度。
在圖4所示的旋量約束拓?fù)鋱D的閉環(huán)Ⅱ中,構(gòu)件AE、E和BE的旋量速度可以通過(guò)(22)式求出,閉環(huán)Ⅱ中其他構(gòu)件的旋量速度可以由已經(jīng)求得的構(gòu)件旋量速度計(jì)算得到,以構(gòu)件AE的旋量速度為基礎(chǔ),閉環(huán)Ⅱ中其他構(gòu)件的旋量速度為
(23)
式中:VDF、VF、VCF分別為構(gòu)件DF、F、CF的旋量速度。
同理,圖4中的閉環(huán)Ⅲ以及圖6中的閉環(huán)ⅰ~ⅲ中各個(gè)構(gòu)件的旋量速度也可以依次求解出。
根據(jù)速度旋量的物理意義,各個(gè)構(gòu)件i的角速度坐標(biāo)量可以表示為
ωi=ω(Vi),
(24)
式中:ω(·)為取速度旋量的原部,即前3項(xiàng)。
速度旋量中包括構(gòu)件的角速度和線速度,其原部為構(gòu)件的角速度,對(duì)偶部為構(gòu)件上原點(diǎn)重合點(diǎn)的線速度,因此構(gòu)件的質(zhì)心線速度可以表示為
vi=ν(Vi)+ω(Vi)×ri,
(25)
式中:ν(·)表示取速度旋量的對(duì)偶部,即后3項(xiàng);ri表示坐標(biāo)原點(diǎn)到構(gòu)件質(zhì)心位置的矢量。
通過(guò)以上分析計(jì)算,就可以完成整個(gè)單元組合機(jī)構(gòu)的角速度和質(zhì)心處線速度的求解。
3.2 其他單元組合機(jī)構(gòu)速度分析
由于雙層環(huán)形桁架可展機(jī)構(gòu)為完全中心對(duì)稱機(jī)構(gòu),各個(gè)單元組合機(jī)構(gòu)尺寸完全相同,且關(guān)于環(huán)形桁架中心對(duì)稱,若在各個(gè)單元組合機(jī)構(gòu)處建立自身坐標(biāo)系,則各個(gè)單元組合機(jī)構(gòu)中位置相同的構(gòu)件在自身坐標(biāo)系下速度相同。
如圖8所示,3.1節(jié)中單元組合機(jī)構(gòu)中各個(gè)構(gòu)件的速度是在圖8中左側(cè)所示的坐標(biāo)系OXYZ中求得的。在與其相鄰連接的右側(cè)單元組合機(jī)構(gòu)處建立坐標(biāo)系O1X1Y1Z1,以花盤連接件B和K為例,花盤連接件B在坐標(biāo)系OXYZ中的速度與花盤連接件K在坐標(biāo)系O1X1Y1Z1中的速度相同,即
(26)
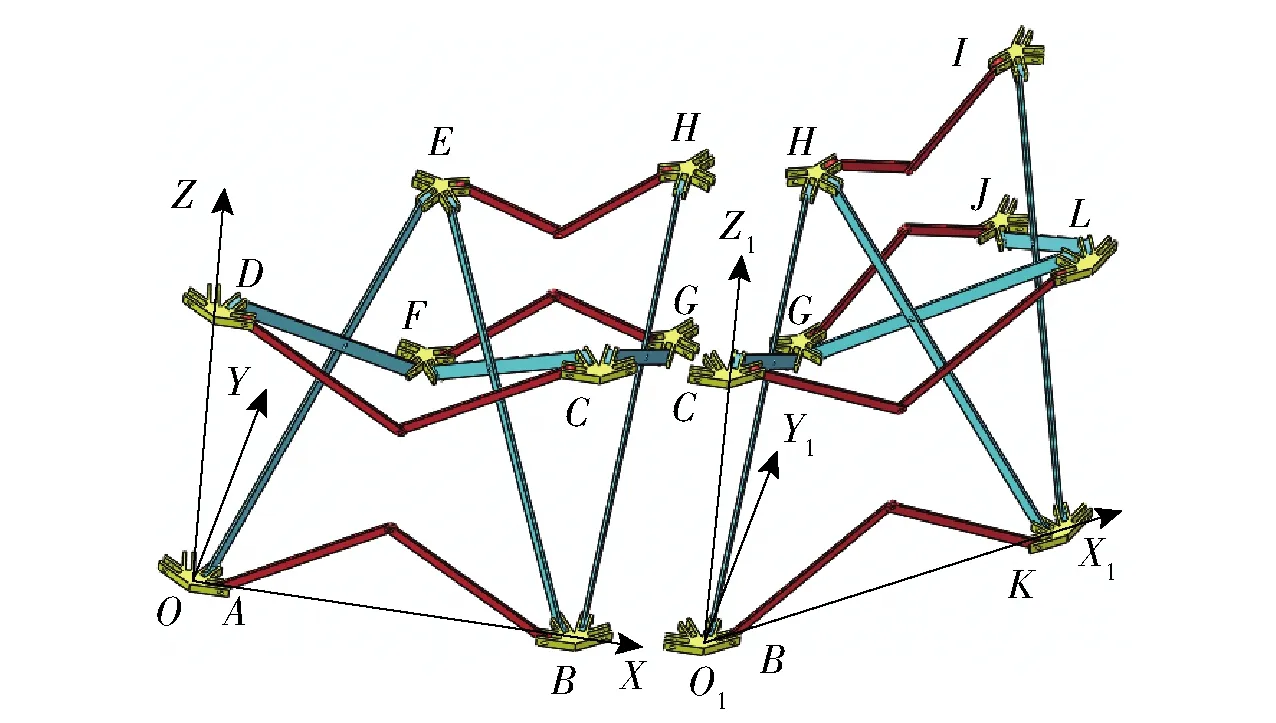
圖8 兩個(gè)單元組合機(jī)構(gòu)及其坐標(biāo)系Fig.8 Two-unit combination mechanisms and coordinate systems
圖8中右側(cè)的單元組合機(jī)構(gòu)中其他構(gòu)件也有類似關(guān)系,同理可以推廣到整個(gè)雙層環(huán)形桁架中其他單元和機(jī)構(gòu)中。若整個(gè)雙層環(huán)形桁架可以分為N個(gè)單元組合機(jī)構(gòu),則可建立OXYZ~ON-1XN-1YN-1ZN-1共N個(gè)坐標(biāo)系,選定坐標(biāo)系OXYZ為全局坐標(biāo)系,相鄰單元中所建坐標(biāo)系X軸間夾角為δ=360/N,如圖9所示。
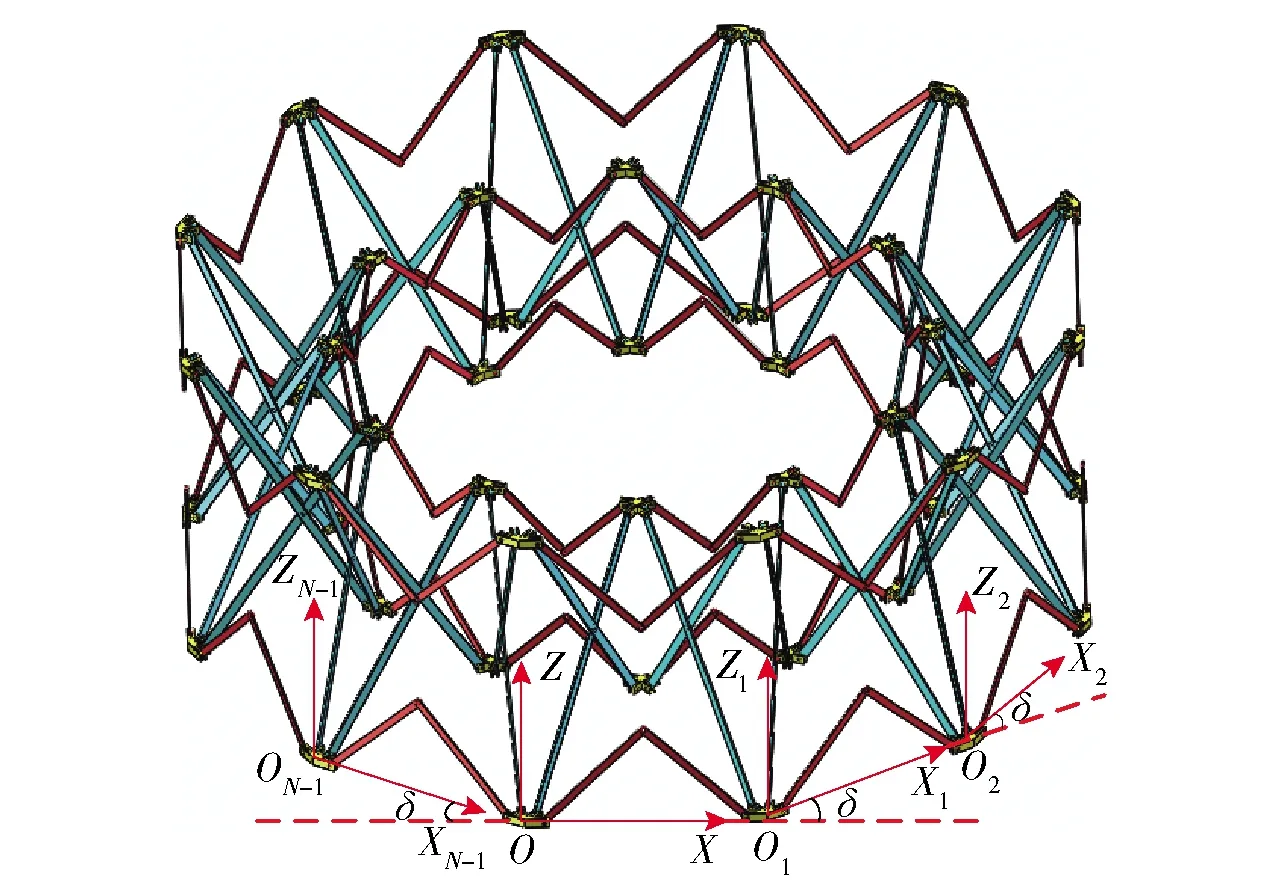
圖9 雙層環(huán)形桁架可展機(jī)構(gòu)及坐標(biāo)系Fig.9 Double-ring truss deployable mechanism and coordinate systems
選定坐標(biāo)系OXYZ為全局坐標(biāo)系,將各個(gè)構(gòu)件速度表示在全局坐標(biāo)系中,則有
(27)
式中:j為坐標(biāo)系編號(hào);
(28)
通過(guò)以上分析計(jì)算,就可以完成整個(gè)雙層環(huán)形桁架可展機(jī)構(gòu)中各個(gè)構(gòu)件角速度和質(zhì)心處線速度的求解,并將其表示在全局坐標(biāo)系下。
3.3 雅可比矩陣
在求出各個(gè)構(gòu)件的角速度和質(zhì)心線速度之后,將其組合便可以得到構(gòu)件的六維速度矢量,由于該機(jī)構(gòu)為單自由度機(jī)構(gòu),只需要一個(gè)驅(qū)動(dòng),在各個(gè)構(gòu)件六維速度矢量中通過(guò)符號(hào)運(yùn)算提取出輸入角速度,便可以得到該構(gòu)件的雅可比矩陣:
(29)
式中:V′i為構(gòu)件i的六維速度矢量;Ji(γ)為第i個(gè)構(gòu)件的速度雅克比矩陣;γ為整體機(jī)構(gòu)的驅(qū)動(dòng)輸入,即驅(qū)動(dòng)角函數(shù)。
4 雙層環(huán)形桁架機(jī)構(gòu)加速度分析
旋量加速度公式[39]為
(30)
式中:Ai為機(jī)構(gòu)中構(gòu)件i的旋量加速度,表示構(gòu)件上參考坐標(biāo)系原點(diǎn)重合點(diǎn)的六維加速度量;εi為構(gòu)件上參考坐標(biāo)系原點(diǎn)重合點(diǎn)的角加速度量;a為構(gòu)件質(zhì)心處的線加速度;ω為構(gòu)件的角速度;v為構(gòu)件的質(zhì)心線速度。由(30)式可以看出,六維旋量加速度中,前3項(xiàng)為構(gòu)件的角速度,后3項(xiàng)為構(gòu)件的線加速度減去其向心加速度量。
多剛體系統(tǒng)旋量加速度合成法則為
(31)
式中:Lie[]為李括號(hào)運(yùn)算,結(jié)果為一個(gè)六維矢量。
若有兩個(gè)旋量:
(32)
則兩個(gè)旋量的李括號(hào)運(yùn)算法則為
(33)
結(jié)合圖4以及(31)式,可以得到各個(gè)閉環(huán)的旋量加速度方程,如由圖4中的閉環(huán)Ⅰ可得
(34)
式中:AεBE表示構(gòu)件BE相對(duì)于構(gòu)件A的角加速度;εi為構(gòu)件上參考坐標(biāo)系原點(diǎn)重合點(diǎn)的角加速度;
(35)
因此有
(36)
同理在圖4中的閉環(huán)Ⅱ、Ⅲ以及圖6中的閉環(huán)ⅰ~ⅲ中也可得到相應(yīng)的旋量加速度方程,在已知輸入的角加速度(如ε1)情況下,通過(guò)求解(36)式及其他旋量加速度方程,便可以求解出單元組合機(jī)構(gòu)中各個(gè)構(gòu)件的旋量加速度。
在求出各個(gè)構(gòu)件的旋量加速度后,提取其原部,可以得到各個(gè)構(gòu)件的角加速度:
εi=ε(εi$i),
(37)
式中:ε(·)表示提取旋量加速度的原部,即前3項(xiàng)。
求解出各個(gè)構(gòu)件的角加速度之后,即可對(duì)構(gòu)件質(zhì)心處的線加速度求解,各構(gòu)件線加速度為
ai=[a(εi$i)+ωi×vi]+[ε(εi$i)×ri]+ [ωi×(ωi×ri)],
(38)
式中:a(·)表示提取旋量加速度的對(duì)偶部,即后3項(xiàng)。
同第3節(jié)中的速度分析,各個(gè)單元組合機(jī)構(gòu)中位置相同的構(gòu)件在自身坐標(biāo)系下加速度相同,將各個(gè)單元組合機(jī)構(gòu)中構(gòu)件的加速度表示在全局坐標(biāo)系中:
(39)
式中:Ok-1εOk為坐標(biāo)系OkXkYkZk相對(duì)于坐標(biāo)系Ok-1Xk-1Yk-1Zk-1的角加速度;Ok-1aOk為坐標(biāo)系OkXkYkZk相對(duì)于坐標(biāo)系Ok-1Xk-1Vk-1Zk-1的原點(diǎn)線加速度。
通過(guò)以上分析計(jì)算,就可以完成整個(gè)雙層環(huán)形桁架可展機(jī)構(gòu)中各個(gè)構(gòu)件角加速度和質(zhì)心線速度的求解,并將其表示在全局坐標(biāo)系下。
5 動(dòng)力學(xué)分析與驗(yàn)證
5.1 動(dòng)力學(xué)建模
根據(jù)牛頓- 歐拉公式,構(gòu)件所受的外力和力矩與其加速度和角加速度的關(guān)系為
(40)
式中:f為構(gòu)件所受外力;τ為構(gòu)件所受力矩;I為構(gòu)件的慣性張量。
在雙層環(huán)形桁架可展機(jī)構(gòu)中,各個(gè)構(gòu)件的慣性力為
fi=-miai.
(41)
各個(gè)構(gòu)件的慣性力矩為
(42)
對(duì)于自身坐標(biāo)系與全局坐標(biāo)系重合的單元組合機(jī)構(gòu)中的各個(gè)構(gòu)件,其慣性力和慣性力矩可以用(41)式和(42)式中的公式來(lái)計(jì)算。對(duì)于其他機(jī)構(gòu)單元中的構(gòu)件,其慣性力可以用(41)式來(lái)計(jì)算,但是其慣性力矩計(jì)算時(shí)需要增加一個(gè)旋轉(zhuǎn)變換矩陣:
(43)
由于可展開天線服役環(huán)境為在軌空間環(huán)境,不用考慮重力的影響,將各個(gè)構(gòu)件的慣性力和慣性力矩寫成六維力矢量的形式:
(44)
由虛功原理,可得雙層環(huán)形桁架可展開天線機(jī)構(gòu)整體動(dòng)力學(xué)方程為
(45)
式中:T為輸入轉(zhuǎn)矩;Ji為構(gòu)件的雅可比矩陣。
5.2 機(jī)構(gòu)可展性與動(dòng)力學(xué)數(shù)值仿真驗(yàn)證
為驗(yàn)證前述理論分析的正確性,加工制作縮比模型樣機(jī),用于驗(yàn)證整體機(jī)構(gòu)的可展性,模型樣機(jī)展開過(guò)程如圖10所示。
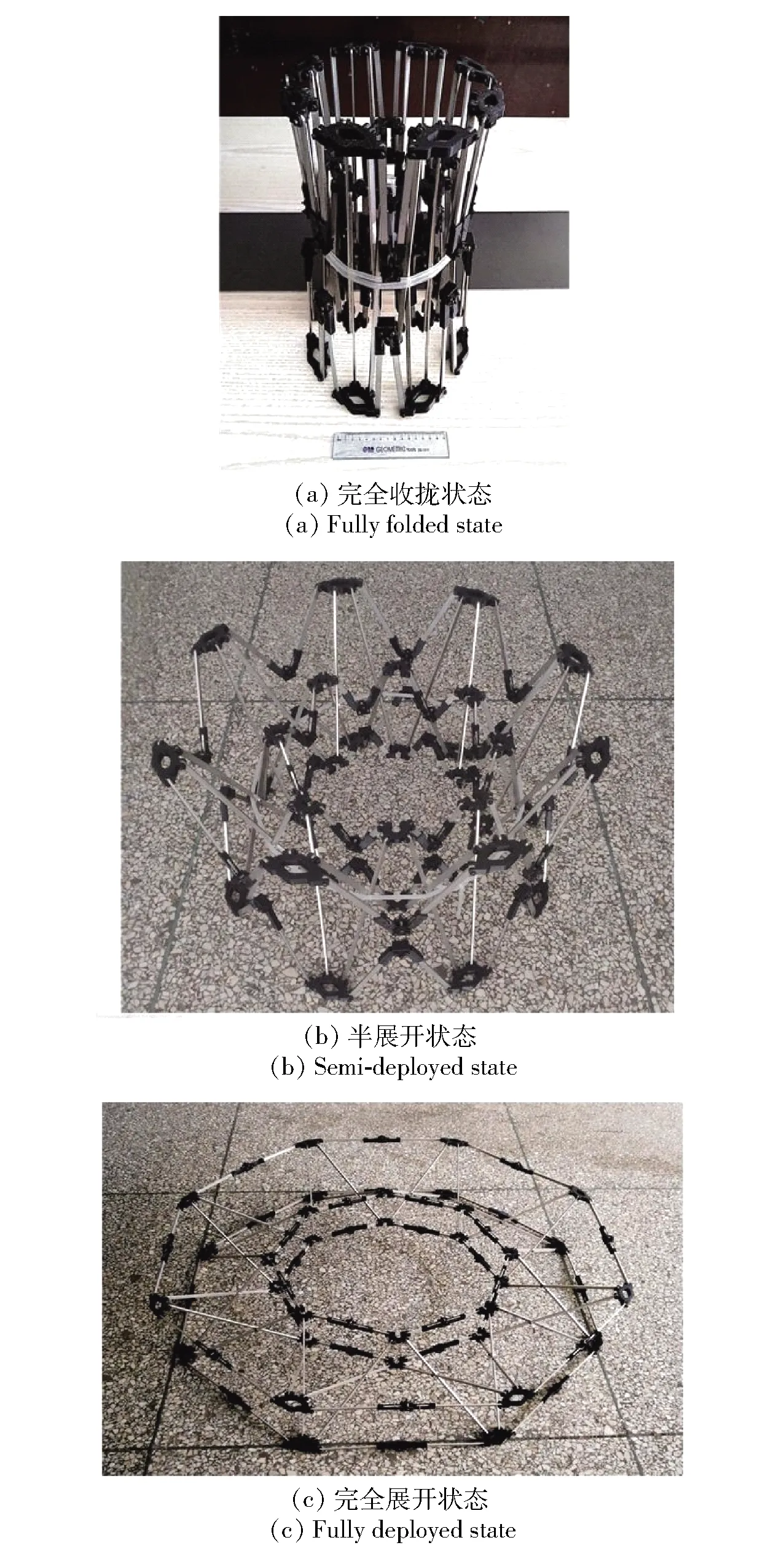
圖10 樣機(jī)展開過(guò)程Fig.10 Deployment process of prototype
建立雙層環(huán)形桁架可展開天線機(jī)構(gòu)的仿真模型,采用動(dòng)力學(xué)仿真軟件Adams和MATLAB軟件進(jìn)行數(shù)值計(jì)算與仿真模擬驗(yàn)證,仿真模型及參數(shù)如圖11和表1所示。
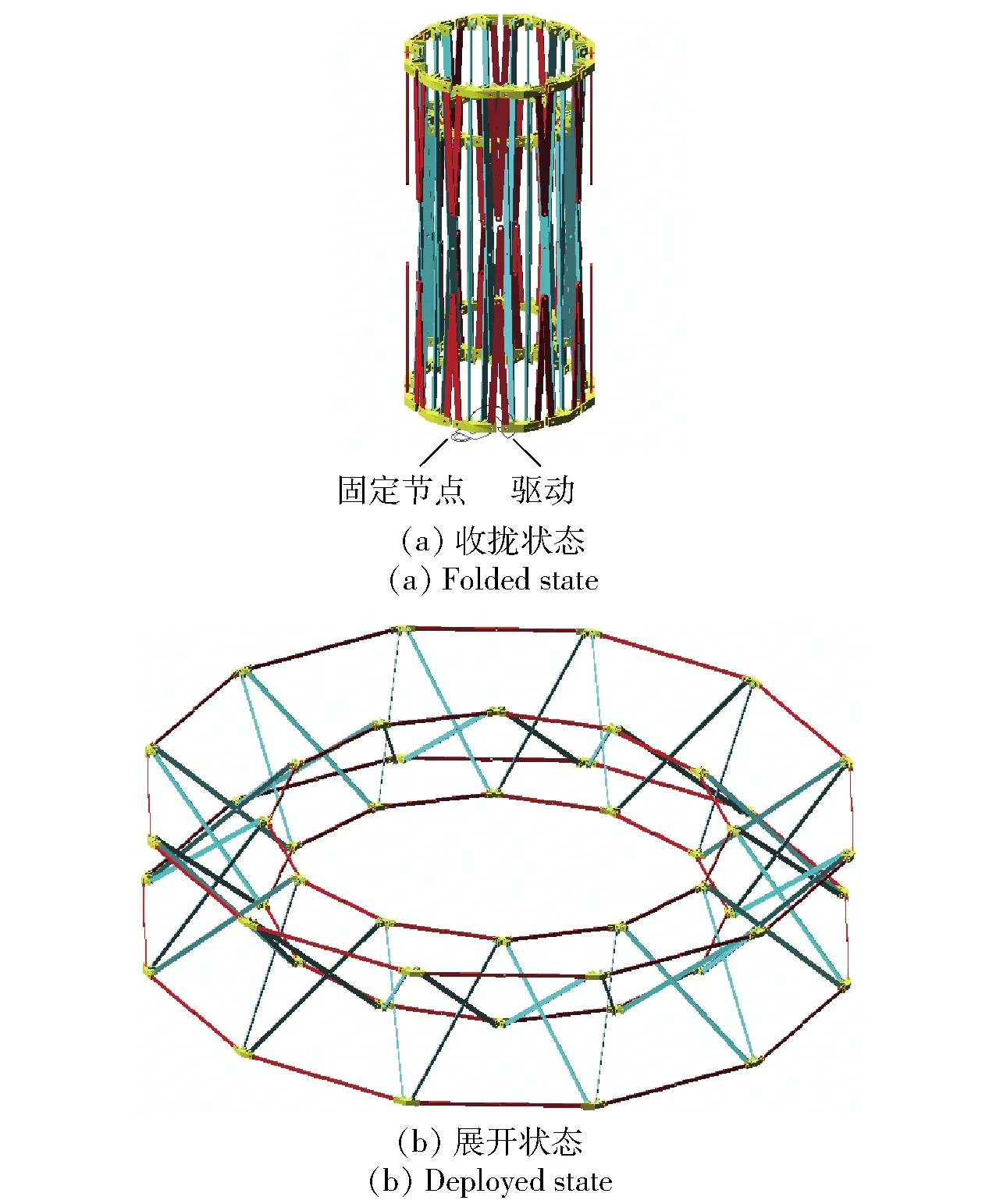
圖11 仿真模型Fig.11 Simulation model
選取自身坐標(biāo)系與全局坐標(biāo)系重合的單元組合機(jī)構(gòu)中的外層花盤連接件、外層環(huán)狀連桿、剪叉桿、內(nèi)層花盤連接件以及內(nèi)層環(huán)狀連桿為目標(biāo)構(gòu)件,理論計(jì)算結(jié)果和仿真結(jié)果如圖12~圖16所示。
通過(guò)圖12~圖16中的各個(gè)曲線,可以得出前面理論分析推導(dǎo)的正確性。從圖12和圖14中可以看出,在整個(gè)雙層環(huán)形桁架可展機(jī)構(gòu)的運(yùn)動(dòng)過(guò)程中,內(nèi)層和外層花盤連接件的角速度和角加速度均為0,各個(gè)花盤連接件只有移動(dòng)運(yùn)動(dòng)并無(wú)轉(zhuǎn)動(dòng)運(yùn)動(dòng),即各個(gè)花盤連接件只有一個(gè)移動(dòng)自由度,無(wú)轉(zhuǎn)動(dòng)自由度,這也跟前面分析得到的機(jī)構(gòu)中各個(gè)運(yùn)動(dòng)構(gòu)件只有一個(gè)自由度相對(duì)應(yīng)。
6 結(jié)論
本文提出了一種雙層環(huán)形桁架式可展天線機(jī)構(gòu),對(duì)其進(jìn)行了結(jié)構(gòu)分解和自由度分析。得出以下主要結(jié)論:
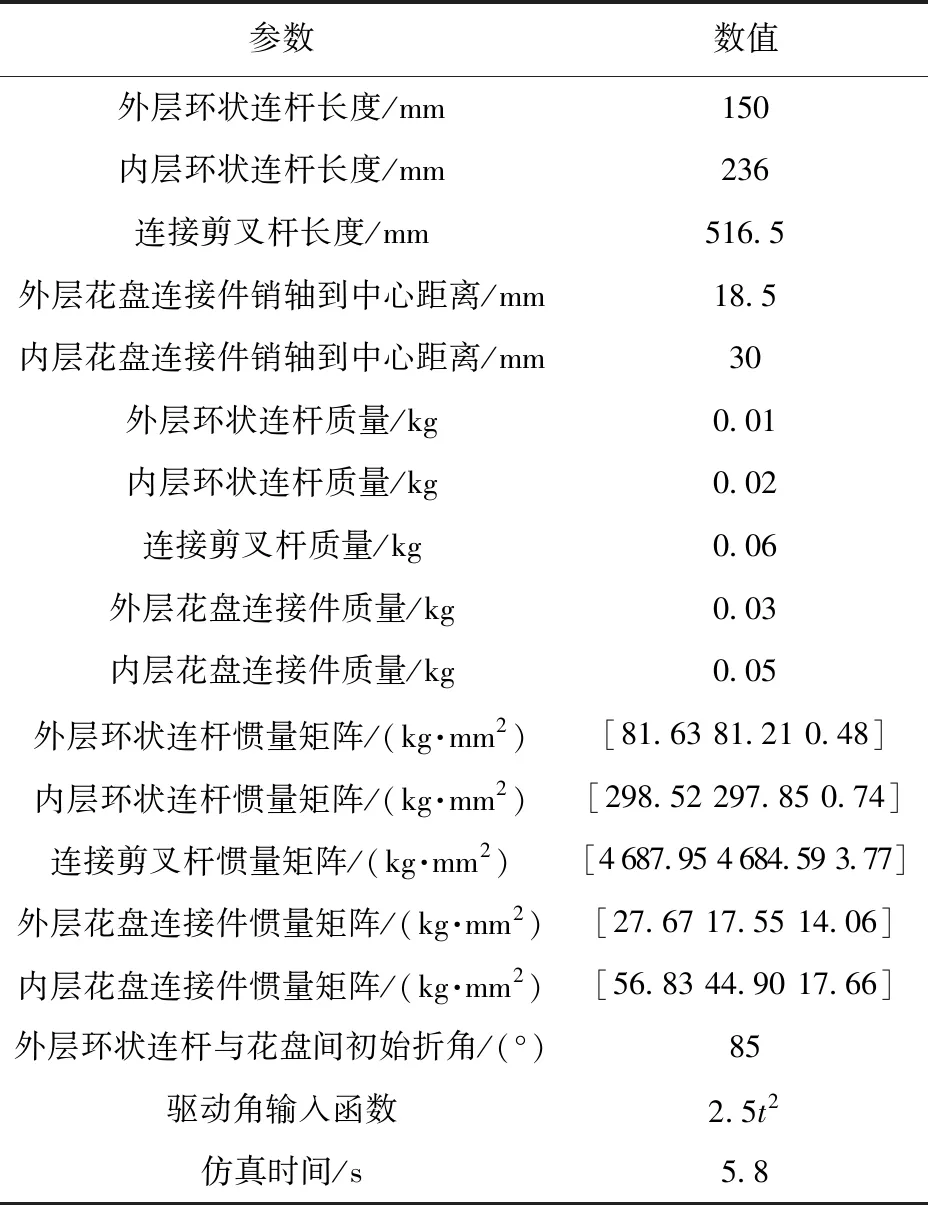
表1 結(jié)構(gòu)及物理參數(shù)表Tab.1 Structural and physical parameters
注:t為仿真時(shí)間。
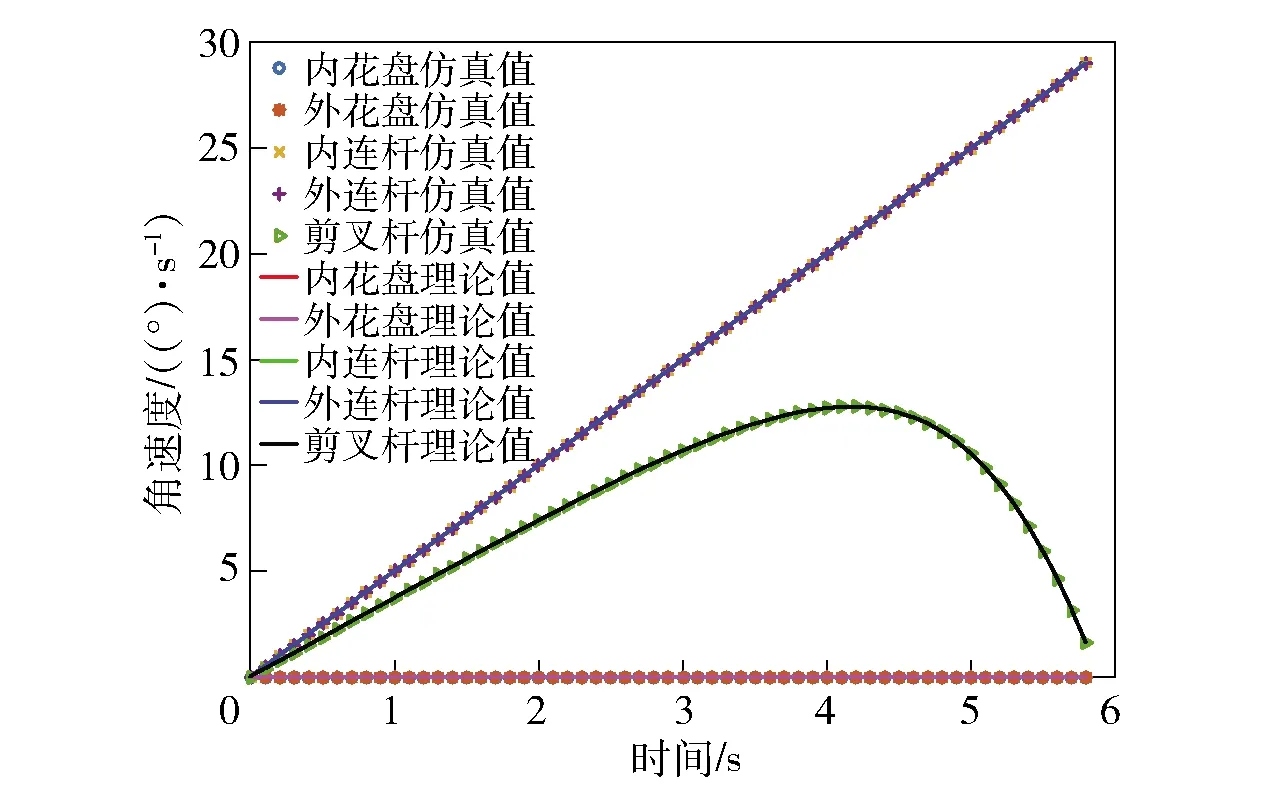
圖12 各構(gòu)件的角速度Fig.12 Angular velocities of components
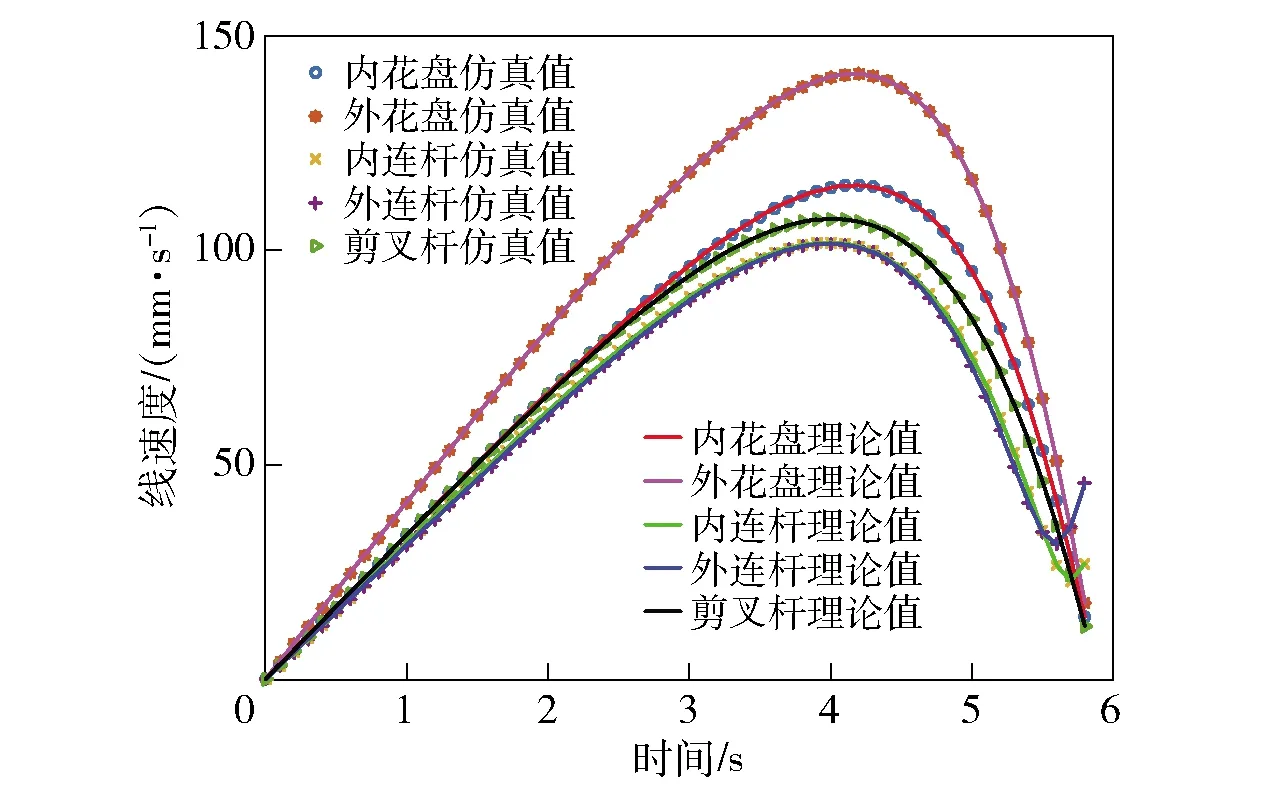
圖13 各構(gòu)件的質(zhì)心線速度Fig.13 Centroid linear velocities of components
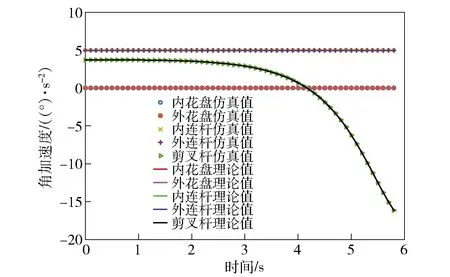
圖14 各構(gòu)件的角加速度Fig.14 Angular accelerations of components
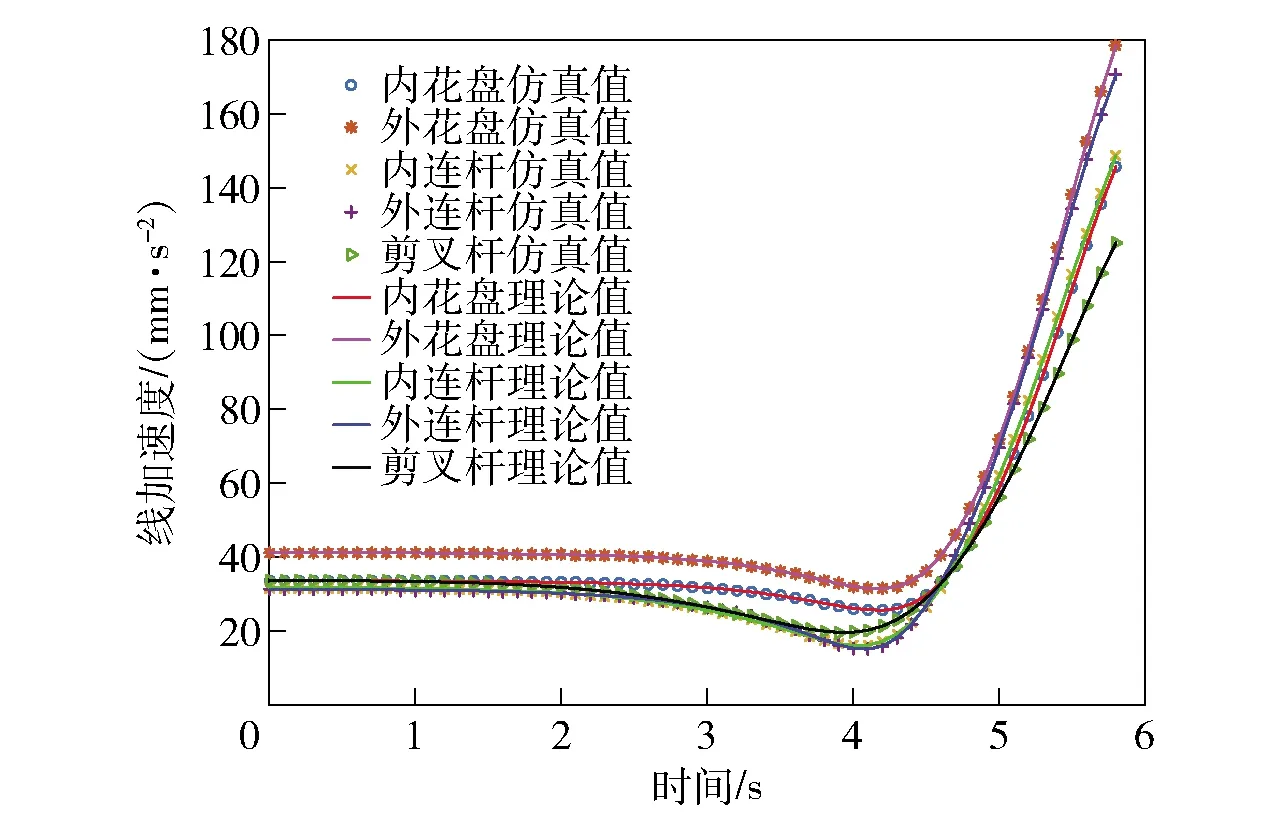
圖15 各構(gòu)件的質(zhì)心線加速度Fig.15 Centroid linear accelerations of components
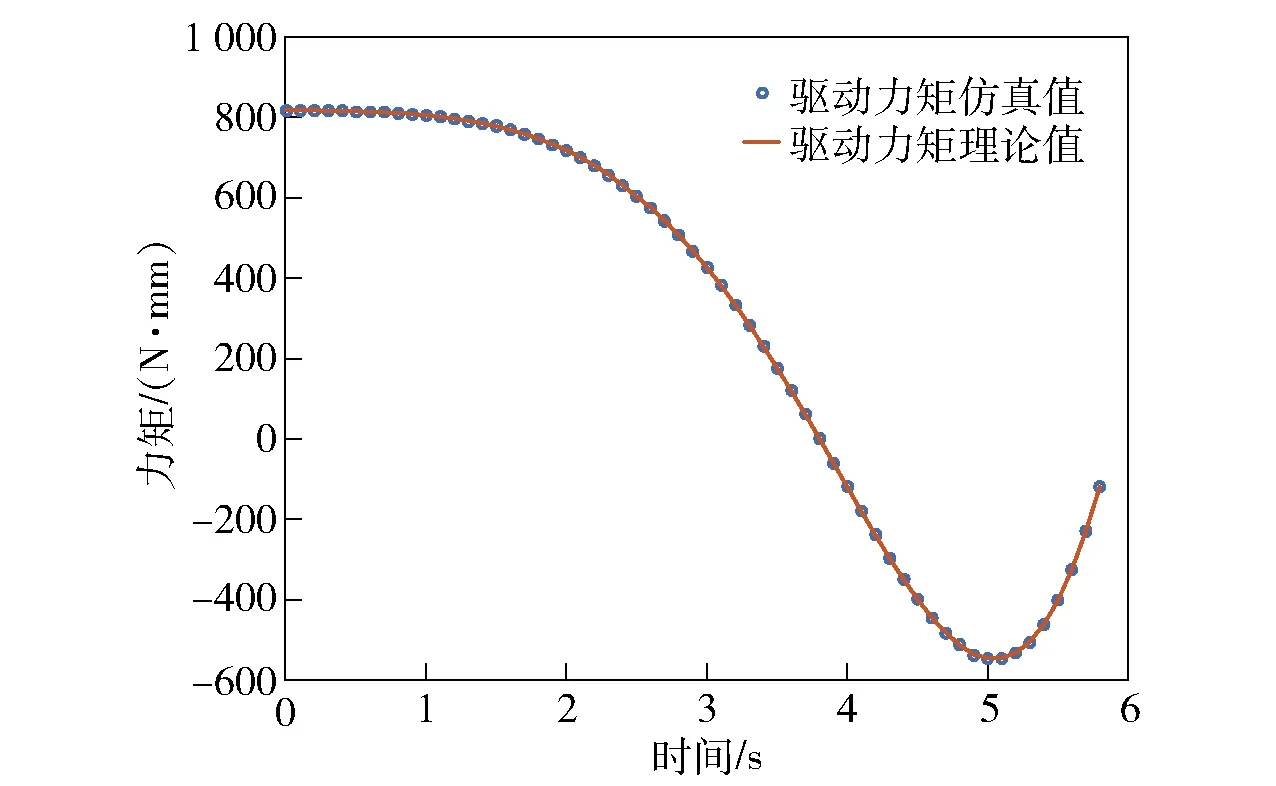
圖16 驅(qū)動(dòng)力矩Fig.16 Input driving torque
1) 雙層環(huán)形桁架式可展天線機(jī)構(gòu)只有一個(gè)運(yùn)動(dòng)自由度,結(jié)構(gòu)簡(jiǎn)單,僅需一個(gè)驅(qū)動(dòng)便可順利展開,可較好地用作大型空間天線的支撐和展開機(jī)構(gòu)。
2)基于螺旋理論,分析了雙層環(huán)形桁架可展天線機(jī)構(gòu)的運(yùn)動(dòng)特性,并結(jié)合牛頓- 歐拉方程和虛功原理建立了整體動(dòng)力學(xué)模型。這種分析方法物理意義明確,過(guò)程較為程式化,易于編程,適用于大型復(fù)雜機(jī)構(gòu)的計(jì)算與分析。
3) 建立了整體雙層環(huán)形桁架可展機(jī)構(gòu)的仿真模型,并進(jìn)行了數(shù)值計(jì)算與仿真驗(yàn)證,計(jì)算和仿真結(jié)果驗(yàn)證了本文理論分析的正確性。本文的研究?jī)?nèi)容可為此類大型復(fù)雜空間可展機(jī)構(gòu)的研發(fā)設(shè)計(jì)提供參考。
