基于永磁同步電機(jī)模型的滑模矢量控制策略研究
2020-05-20 15:05:18徐曉通華青松張洪信邱瑞林
關(guān)鍵詞:永磁同步電機(jī)
徐曉通 華青松 張洪信 邱瑞林

摘要:針對(duì)傳統(tǒng)矢量控制方式永磁同步電機(jī)(permanent magnet synchronous motor,PMSM)存在的低速時(shí)啟動(dòng)電流及轉(zhuǎn)速超調(diào)量過(guò)大等問(wèn)題,本文利用指數(shù)趨近率,設(shè)計(jì)了一種基于滑模變結(jié)構(gòu)的矢量控制策略。首先利用矢量控制(field oriented control,F(xiàn)OC)方式進(jìn)行分析,結(jié)合選取的矢量控制方式進(jìn)行滑模趨近率的選取,并采用Matlab/Simulink軟件對(duì)永磁同步電機(jī)及所提出的控制策略進(jìn)行建模,對(duì)所設(shè)計(jì)的永磁同步電機(jī)控制系統(tǒng)進(jìn)行仿真分析。仿真結(jié)果表明,在所設(shè)計(jì)的滑模矢量控制模式下,加速過(guò)程中,系統(tǒng)會(huì)出現(xiàn)小幅度的超調(diào),但能在0.05 s內(nèi)使電機(jī)達(dá)到指定轉(zhuǎn)速;負(fù)載轉(zhuǎn)矩抗干擾能力較強(qiáng),穩(wěn)態(tài)性能良好;電流控制效果良好,且在允許范圍內(nèi)逐步減弱至平衡態(tài)。本文設(shè)計(jì)的滑模控制具有良好的轉(zhuǎn)速控制性能。該研究為后期實(shí)物驗(yàn)證提供了理論支持。
關(guān)鍵詞:永磁同步電機(jī); 趨近率; 滑模控制; 矢量控制
中圖分類號(hào): TM351文獻(xiàn)標(biāo)識(shí)碼: A
文章編號(hào): 1006-9798(2020)02-0069-06; DOI: 10.13306/j.1006-9798.2020.02.011
永磁同步電機(jī)具有可靠性高、效率高、轉(zhuǎn)矩脈動(dòng)小等優(yōu)點(diǎn),永磁技術(shù)在汽車和工業(yè)領(lǐng)域的應(yīng)用越來(lái)越廣泛[1-4]。但永磁同步電機(jī)是一個(gè)集磁鏈、電流和轉(zhuǎn)速等多變量為一體的耦合系統(tǒng),但由于外部干擾的介入,使其控制十分困難。滑模控制作為一種具有高魯棒性和高快速性的非線性控制策略,非常適用于永磁同步電機(jī)的控制特性[5-7]。目前,對(duì)永磁同步電機(jī)控制特性的研究有很多。李芳等人[8]介紹了一種基于模糊控制的永磁同步電機(jī)控制策略,雖然該控制策略能夠使電機(jī)達(dá)到預(yù)期轉(zhuǎn)速,但啟動(dòng)過(guò)程中轉(zhuǎn)速波動(dòng)較大;饒美麗等人[9]介紹了一種將滑模面建立在ABC坐標(biāo)系下的控制方法,但控制方法建模困難,且參數(shù)求解不準(zhǔn)確;呂剛震等人[10]介紹了一種基于普通趨近率的滑模策略,雖然其控制效果良好,但快速性方面有待提高;Tian B等人[11]研究了一種基于反電勢(shì)的五相永磁電機(jī)的滑模控制策略,但由于三次諧波的不穩(wěn)定性,使輸出轉(zhuǎn)矩不穩(wěn)定;Wang S Y等人[12]介紹了一種滑模控制和模糊理論集成的控制方式,在快速啟動(dòng)時(shí)未得到驗(yàn)證;P. Q. Khanh等人[13]介紹了神經(jīng)矢量控制在汽車上的應(yīng)用,雖然控制精確,卻需要對(duì)數(shù)據(jù)進(jìn)行權(quán)重分析,不同工況的適用性較差;J. Lara等人[14]提出使用高頻信號(hào)注入的方法進(jìn)行控制器的設(shè)計(jì),雖然降低了轉(zhuǎn)矩紋波,但效率較低。基于此,為保證控制過(guò)程的快速性和較小的系統(tǒng)抖振,本文利用指數(shù)趨近率,設(shè)計(jì)了一種基于滑模變結(jié)構(gòu)的矢量控制策略,不僅具有矢量控制的低脈動(dòng),同時(shí)加強(qiáng)了快速性和穩(wěn)定性。仿真結(jié)果表明,在該控制策略下,電機(jī)具有良好的動(dòng)態(tài)性和魯棒性。
1矢量控制方式分析
常用的矢量控制方案包括id=0控制、最大轉(zhuǎn)矩電流比控制、弱磁控制和恒磁鏈控制[15]等4種。
1)id=0控制。對(duì)于表貼式電機(jī),定子電流is在該控制方案下可以保證與永磁體只存在交軸分量,由定子所產(chǎn)生的電流全部用于做功驅(qū)動(dòng)轉(zhuǎn)子旋轉(zhuǎn),因此表現(xiàn)為輸出轉(zhuǎn)矩最大,不對(duì)永磁體磁場(chǎng)進(jìn)行削弱。此時(shí)可得電磁轉(zhuǎn)矩以電流為變量的線性方程,此控制方式較簡(jiǎn)單,只能用于表貼式轉(zhuǎn)子,內(nèi)嵌式轉(zhuǎn)子所特有的磁阻轉(zhuǎn)矩在此方法下無(wú)法得到有效利用[16]。
2)最大轉(zhuǎn)矩電流比控制。力矩電流比最大控制能使電池輸出功率一定時(shí)電機(jī)的定子電流最小,也可稱之為最大轉(zhuǎn)矩電流比控制,這一方法適用于能夠產(chǎn)生磁阻轉(zhuǎn)矩的嵌入式轉(zhuǎn)子,表貼式轉(zhuǎn)子的交直軸電感在數(shù)值上相等,若使用此方向,則與id=0控制方式效果相當(dāng)[17]。在使用嵌入式轉(zhuǎn)子的電機(jī)中若,采用最大轉(zhuǎn)矩電流比控制方式,通過(guò)將交直軸電流按照一定的規(guī)律進(jìn)行控制,可以獲得輸入功率一定情況下的最大轉(zhuǎn)矩。
3)弱磁控制。在定轉(zhuǎn)子設(shè)計(jì)成型后,PMSM的物理特性就已經(jīng)確定,這些固有特性無(wú)法進(jìn)行更改,若在系統(tǒng)輸入量以及負(fù)載量固定時(shí),通過(guò)傳統(tǒng)方法可能無(wú)法實(shí)現(xiàn)性能的再次提升,由此引入了弱磁控制[18]。若在高速小扭矩情況下想利用固定系統(tǒng)獲得更高的性能(主要是轉(zhuǎn)速),需要定子電流在交軸上產(chǎn)生負(fù)分量,以實(shí)現(xiàn)直軸上的去磁作用。通過(guò)調(diào)節(jié)定子電流所產(chǎn)生的負(fù)分量,即可調(diào)整弱磁效果的強(qiáng)弱,但介于永磁體性能,弱磁效果不能無(wú)限增強(qiáng),否則會(huì)導(dǎo)致永久退磁,轉(zhuǎn)子無(wú)法正常工作,一般只弱磁使轉(zhuǎn)速達(dá)到傳統(tǒng)控制方式的2倍左右。
4)恒磁鏈控制。該方法通過(guò)控制定子電流使合成磁鏈的幅值保持為定值,該值大小等于轉(zhuǎn)子上的磁鏈幅值。在此方法下,可以獲得相對(duì)較高的功率因數(shù),并使用較小的控制器容量,由此可減小系統(tǒng)整體的體積,實(shí)現(xiàn)系統(tǒng)小型化。但此方法下無(wú)法獲得最大轉(zhuǎn)矩,可能影響電動(dòng)汽車的駕駛性能,導(dǎo)致體驗(yàn)感下降[19]。
通過(guò)分析比較上述4種控制方案,針對(duì)表貼式永磁同步電機(jī)的特性,本文采用id=0控制方案,該方案可在有限的能量作用下輸出最高轉(zhuǎn)矩,保障電機(jī)輸出性能。
2滑模控制趨近率的確定
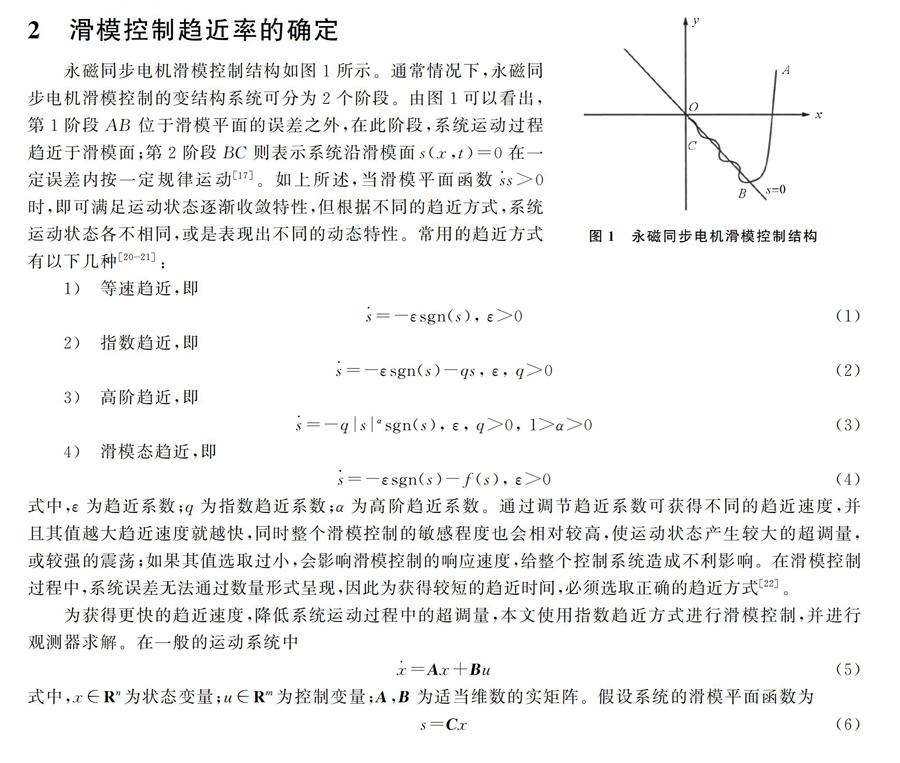
永磁同步電機(jī)滑模控制結(jié)構(gòu)如圖1所示。通常情況下,永磁同步電機(jī)滑模控制的變結(jié)構(gòu)系統(tǒng)可分為2個(gè)階段。由圖1可以看出,第1階段AB位于滑模平面的誤差之外,在此階段,系統(tǒng)運(yùn)動(dòng)過(guò)程趨近于滑模面;第2階段BC則表示系統(tǒng)沿滑模面s(x,t)=0在一定誤差內(nèi)按一定規(guī)律運(yùn)動(dòng)[17]。如上所述,當(dāng)滑模平面函數(shù)s>0時(shí),即可滿足運(yùn)動(dòng)狀態(tài)逐漸收斂特性,但根據(jù)不同的趨近方式,系統(tǒng)運(yùn)動(dòng)狀態(tài)各不相同,或是表現(xiàn)出不同的動(dòng)態(tài)特性。常用的趨近方式有以下幾種[20-21]:
1)等速趨近,即
2)指數(shù)趨近,即
3)高階趨近,即
4)滑模態(tài)趨近,即
式中,ε為趨近系數(shù);q為指數(shù)趨近系數(shù);α為高階趨近系數(shù)。通過(guò)調(diào)節(jié)趨近系數(shù)可獲得不同的趨近速度,并且其值越大趨近速度就越快,同時(shí)整個(gè)滑模控制的敏感程度也會(huì)相對(duì)較高,使運(yùn)動(dòng)狀態(tài)產(chǎn)生較大的超調(diào)量,或較強(qiáng)的震蕩;如果其值選取過(guò)小,會(huì)影響滑模控制的響應(yīng)速度,給整個(gè)控制系統(tǒng)造成不利影響。在滑模控制過(guò)程中,系統(tǒng)誤差無(wú)法通過(guò)數(shù)量形式呈現(xiàn),因此為獲得較短的趨近時(shí)間,必須選取正確的趨近方式[22]。
為獲得更快的趨近速度,降低系統(tǒng)運(yùn)動(dòng)過(guò)程中的超調(diào)量,本文使用指數(shù)趨近方式進(jìn)行滑模控制,并進(jìn)行觀測(cè)器求解。在一般的運(yùn)動(dòng)系統(tǒng)中
式中,x∈Rn為狀態(tài)變量;u∈Rm為控制變量;A,B為適當(dāng)維數(shù)的實(shí)矩陣。假設(shè)系統(tǒng)的滑模平面函數(shù)為
式中,s∈Rm為滑膜平面函數(shù);C∈Rnxm為適當(dāng)?shù)南蛄浚珻可使系統(tǒng)獲得期望的動(dòng)態(tài)特性。
對(duì)平面函數(shù)求導(dǎo),得
由式(6)和式(7)得,滑模控制器u為
將所求取的滑模控制器帶入系統(tǒng)可達(dá)性公式s中,初步驗(yàn)證其正確性,即永磁同步電機(jī)在此控制器下進(jìn)行的運(yùn)動(dòng)狀態(tài)能夠?qū)崿F(xiàn)向滑模平面的漸進(jìn)穩(wěn)定。
3滑模速度控制器設(shè)計(jì)
為與矢量控制結(jié)合,方便后期控制策略的搭建,該設(shè)計(jì)采用dq坐標(biāo)下永磁同步電機(jī)數(shù)學(xué)模型進(jìn)行滑模速度控制器的設(shè)計(jì)。其中,PMSM的數(shù)學(xué)模型為
式中,U、i、L、ψ、分別表示機(jī)電液耦合器定子電壓、電流、電感、磁鏈在dq軸上的分量;Rs、J、TL分別為定子內(nèi)阻、轉(zhuǎn)動(dòng)慣量、負(fù)載轉(zhuǎn)矩。由于本文利用id=0的矢量控制方式進(jìn)行控制策略設(shè)計(jì),已取得預(yù)期的效果,因此可根據(jù)上述控制方式,將式(9)中的數(shù)學(xué)模型變換為
定義電機(jī)內(nèi)的狀態(tài)變量為
其中,ωref是PMSM參考速度,一般人為設(shè)定一目標(biāo)值;ωm為實(shí)際轉(zhuǎn)速。將式(10)和式(11)結(jié)合,運(yùn)算得
定義滑模控制器輸入u=q,D=3pψm/2J可將式(12)變換為
根據(jù)狀態(tài)變量,對(duì)滑模面函數(shù)進(jìn)行定義,即
式中,c>0為所需設(shè)計(jì)的參數(shù)值。為計(jì)算可到達(dá)性,將式(14)進(jìn)行求導(dǎo),得
根據(jù)本小節(jié)基本原理中選擇的指數(shù)趨近方式,可得控制器表達(dá)式為
結(jié)合式(16),可得交軸的參考電流為
由式(17)可知,計(jì)算公式由積分組成,相當(dāng)于給控制器添加了穩(wěn)定環(huán),能夠提高系統(tǒng)在整個(gè)過(guò)程中的穩(wěn)定性,不僅可以解決因?yàn)檫x取趨近常數(shù)太大而導(dǎo)致的抖振現(xiàn)象,還能去除系統(tǒng)在穩(wěn)態(tài)時(shí)的誤差,進(jìn)而提高整個(gè)系統(tǒng)的控制性能和品質(zhì)[23]。
通過(guò)驗(yàn)證可到達(dá)性不等式,證明式(16)所設(shè)計(jì)的控制器能夠使系統(tǒng)運(yùn)動(dòng)狀態(tài)趨于穩(wěn)定狀態(tài)。滑模矢量控制框圖如圖2所示,在傳統(tǒng)PI矢量控制基礎(chǔ)上,加入滑模控制模塊,在測(cè)得PMSM的電流和位置信息后,通過(guò)坐標(biāo)變換反饋到主通道中,完成電流速度雙閉環(huán)模式的電機(jī)控制。
4滑模矢量控制仿真驗(yàn)證
在Simulink中搭建滑模矢量控制策略仿真模型,對(duì)所設(shè)計(jì)的永磁同步電機(jī)控制系統(tǒng)進(jìn)行轉(zhuǎn)速和動(dòng)態(tài)響應(yīng)特性分析。在仿真過(guò)程中,設(shè)置電機(jī)參數(shù)為:定子電阻Rs=2.08 Ω,定子電感L=8.35×10-4 H,永磁體磁鏈Ψm=0.175 Wb,轉(zhuǎn)動(dòng)慣量J=3×10-3 kg/m2,極對(duì)數(shù)為3,輸入電壓Udc=311 V。電機(jī)轉(zhuǎn)速曲線如圖3所示,電機(jī)轉(zhuǎn)矩曲線如圖4所示,檢測(cè)到定子三相電流,定子三相電流曲線如圖5所示。
仿真過(guò)程中,使電機(jī)以0轉(zhuǎn)矩啟動(dòng),檢測(cè)在空載條件下,控制系統(tǒng)由靜止加速到1 000 r/m的快速性及穩(wěn)定性;在0.2 s時(shí),給電機(jī)添加負(fù)載轉(zhuǎn)矩,測(cè)試控制系統(tǒng)在負(fù)載突變情況下的穩(wěn)定性和穩(wěn)態(tài)調(diào)整能力。
由圖3可以看出,在SMCFOC控制模式下,雖然在加速過(guò)程中會(huì)出現(xiàn)小幅度的超調(diào),但是系統(tǒng)的快速性很高,能在0.05 s內(nèi)使電機(jī)達(dá)到指定轉(zhuǎn)速;當(dāng)負(fù)載轉(zhuǎn)矩突變時(shí),轉(zhuǎn)速波動(dòng)不到10%,抗干擾能力較強(qiáng);在負(fù)載不變時(shí),穩(wěn)態(tài)性能良好,轉(zhuǎn)速穩(wěn)定。由圖4可以看出,電機(jī)啟動(dòng)時(shí),系統(tǒng)可提供超大扭矩,使電機(jī)快速啟動(dòng),且在0.02 s電機(jī)獲得足夠動(dòng)能;當(dāng)外部負(fù)載突變時(shí),也能在0.02 s內(nèi)達(dá)到平衡態(tài);穩(wěn)態(tài)時(shí),轉(zhuǎn)矩脈動(dòng)較小,曲線平穩(wěn)在滑模面附近擺動(dòng)。由圖4還可以看出,穩(wěn)態(tài)時(shí),電流曲線圓滑、無(wú)毛刺,控制效果良好;負(fù)載變化小時(shí)加速平穩(wěn),突變時(shí)電流在允許范圍內(nèi)逐步減弱至平衡態(tài)。
5結(jié)束語(yǔ)
本文主要對(duì)永磁同步電機(jī)模型的滑膜矢量控制策略進(jìn)行研究,提出一種永磁同步電機(jī)滑模變結(jié)構(gòu)的矢量控制方法,在原矢量控制基礎(chǔ)上,加入滑模面進(jìn)行模糊控制,而且通過(guò)電流、轉(zhuǎn)速雙閉環(huán)結(jié)構(gòu)對(duì)電機(jī)的轉(zhuǎn)速、轉(zhuǎn)矩進(jìn)行精確控制。在分析介紹控制方式的基本原理后,將所建立的數(shù)學(xué)模型在Simulink中進(jìn)行仿真驗(yàn)證,驗(yàn)證結(jié)果表明,該控制方法控制效果良好,具有快速響應(yīng)性好、轉(zhuǎn)矩脈動(dòng)低、穩(wěn)態(tài)誤差小等優(yōu)點(diǎn)。本文所述方法相對(duì)于傳統(tǒng)矢量控制方法,改進(jìn)效果顯著。后期將對(duì)滑模面進(jìn)一步優(yōu)化,可獲得更好的控制效果,以便為實(shí)物驗(yàn)證提供理論支持。
參考文獻(xiàn):
[1]朱魯佳. 電動(dòng)汽車用永磁同步電機(jī)驅(qū)動(dòng)系統(tǒng)的高性能控制[J]. 電機(jī)與控制應(yīng)用, 2015, 42(2): 56-59.
[2]易伯瑜, 康龍?jiān)疲?陶思念, 等. 永磁同步電機(jī)抗擾高階淆模觀測(cè)器設(shè)計(jì)學(xué)報(bào)[J]. 電工技術(shù)學(xué)報(bào), 2014, 29(5): 133-138.
[3]張曉光, 趙克, 孫力, 等. 永磁同步電機(jī)滑模變結(jié)構(gòu)調(diào)速系統(tǒng)動(dòng)態(tài)品質(zhì)控制[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2011, 31(15): 47-52.
[4]張曉光, 孫力, 趙克.基于負(fù)載轉(zhuǎn)矩滑模觀測(cè)的永磁同步電機(jī)滑模控制[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2012, 32(3): 111-116.
[5]Corradini M L, Ippoliti G, Longhi S, et al. A quasisliding mode approach for robust control and speed estimation of pm synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2012, 59(2): 1096-1104.
[6]Malesani L, Spiazzi R G, Tenti P. Performance optimization of cuk converters by slidingmode control[J]. IEEE Transactions on Power Electronics, 1995, 10(3): 302-309.
[7]肖海峰, 劉海龍, 賀昱曜, 等. 線性-滑模變結(jié)構(gòu)的IPMSM直接轉(zhuǎn)矩控制研究[J]. 控制工程, 2015, 22(1): 144-149.
[8]李芳, 王毓順, 張家瑞. 基于模糊 PI 控制的永磁同步電機(jī)的建模與仿真[J]. 工業(yè)控制計(jì)算機(jī), 2013, 26(8): 73-74.
[9]饒美麗, 徐增勇. 基于固定開(kāi)關(guān)頻率的永磁同步電機(jī)滑模控制[J]. 電氣傳動(dòng), 2019, 49(6): 17-23.
[10]賈洪平, 孫丹, 賀益康. 基于滑模變結(jié)構(gòu)的永磁同步電機(jī)直接轉(zhuǎn)矩控制[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2006, 26(20): 134-138.
[11]Tian B, An Q T, Duan J D, et al. Decoupled modeling and nonlinear speed control for fivephase pm motor under singlephase open fault[J]. IEEE Transactions on Power Electronics, 2016, 99: 5473 - 5486.
[12]Wang S Y, Lin C M, Tseng ChwanLu, et al. Design of a fuzzy slidingmode controller for induction motor vector control systems[C]∥2016 International Automatic Control Conference, Taichung, Taiwan: IEEE, 2016: 17-27.
[13]Khanh P Q, Anh H P H, Kien C V. Advanced sensorless control of IPMSM motor using adaptive neural FOC approach[J]. Applied Mechanics and Materials, 2019, 894: 149-157.
[14]Lara J, Chandra A. Performance investigation of two novel HSFSI demodulation algorithms for encoderless FOC of PMSMs intended for EV propulsion[J]. IEEE Transactions on Industrial Electronics, 2017: 1074-1083.
[15]尚喆. 永磁同步電機(jī)磁場(chǎng)定向控制的研究[D]. 杭州: 浙江大學(xué), 2007.
[16]Bose B K. A highperformance inverterfed drive system of an interior permanent magnet synchronous machine[J]. IEEE Transactions on Industry Applications, 1988, 24(6): 987-997.
[17]Saiyad Mahammadsoaib M, Patel Sajid M. Vector controlled PMSM drive using SVPWM techniqueA MATLAB / Simulink implementation[C]∥International Conference on Electrical, Electronics, Signals, Communication and Optimization.? Paris: IEEE, 2015: 1-5.
[18]Boby K, Kottalil A M, Ananthamoorthy N P. Mathematical modelling of PMSM vector control system based on SVPWM with PI controller using MATLAB[C]∥International Jornal of Advanced Research in Electrical Electronics and Instrumentation Engineering, 2013: 856-902.
[19]Middleton R H, Goodwin G C. Digital control and estimation: a unified approach[J]. Prentice Hall Intemational Editions, 2004, 3(2): 15-22.
[20]Zhang X, Sun L, Zhao K. Nonlinear speed control for PMSM system using slidingmode control and disturbance compensation techniques[J].? IEEE Transactions on Power Electronics, 2013, 28(3): 1358- 1365.
[21]Kim W, Shin D, Chung C C. Micro stepping using a disturbance observer and a variable structure controller for permanentmagnet stepper motors[J]. IEEE Transactions on Industrial Electron, 2012, 60(7): 2689-2699.
[22]張裊娜, 許祥軍, 林曉梅. 基于二階滑模的永磁同步電動(dòng)機(jī)直接轉(zhuǎn)矩控制[J]. 微電動(dòng)機(jī), 2010, 43(10): 33-35.
[23]李琳. 滑模變結(jié)構(gòu)控制系統(tǒng)抖振抑制方法的研究[D]. 大連: 大連理工大學(xué), 2006.
Research on Sliding Mode Vector Control Strategy Based on Permanent Magnet Synchronous Motor Model
XU Xiaotong, HUA Qingsong, ZHANG Hongxin, QIU Ruilin
(School of Electromechanic Engineering, Qingdao University, Qingdao 266071, China)
Abstract:Aiming at a series of problems of the permanent magnet synchronous motor (PMSM) of the traditional vector control method at low speed, such as excessive starting current and excessive speed overshoot, this paper uses an exponential approach to design a slipbased Vector control strategy for modal structure. Firstly, the vector control (field oriented control, FOC) method is analyzed, and the sliding mode approach rate is selected based on the selected vector control method. The permanent magnet synchronous motor and the proposed control strategy are modeled with Matlab/Simulink. The designed permanent magnet synchronous motor control system is simulated and analyzed. The simulation results show that under the designed sliding mode vector control mode, during the acceleration process, the system will have a small overshoot, but the motor can reach the specified speed within 0.05 s;the load torque has a strong antiinterference ability. The steadystate performance is good;the current control effect is good, and it gradually decreases to the equilibrium state within the allowable range. It shows that the designed sliding mode control has good speed control performance. This research provides theoretical support for later physical verification.
Key words:permanent magnet synchronous motor; approaching rate; sliding mode control; vector control
收稿日期: 2020-01-31; 修回日期: 2020-02-14
作者簡(jiǎn)介: 徐曉通(1995-),男,碩士研究生,主要研究方向?yàn)殡妱?dòng)汽車智能化。
通信作者: 張洪信(1969-),男,工學(xué)博士,教授,碩士生導(dǎo)師,主要研究方向?yàn)檐囕v新型動(dòng)力傳動(dòng)技術(shù)設(shè)計(jì)及仿真。 Email: qduzhx@126.com
猜你喜歡
現(xiàn)代電子技術(shù)(2017年1期)2017-02-16 11:49:32
汽車工程學(xué)報(bào)(2016年5期)2017-01-16 02:42:50
計(jì)算技術(shù)與自動(dòng)化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國(guó)科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識(shí)與技術(shù)(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識(shí)與技術(shù)(2016年2期)2016-03-22 22:21:46
電腦知識(shí)與技術(shù)(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學(xué)學(xué)報(bào)(2015年6期)2016-02-18 00:26:49
 青島大學(xué)學(xué)報(bào)(工程技術(shù)版)2020年2期
青島大學(xué)學(xué)報(bào)(工程技術(shù)版)2020年2期
- 青島大學(xué)學(xué)報(bào)(工程技術(shù)版)的其它文章
- 基于Matlab GUI的股票價(jià)格走勢(shì)模擬系統(tǒng)開(kāi)發(fā)
- 聯(lián)合收割機(jī)傳動(dòng)系統(tǒng)設(shè)計(jì)與仿真分析
- 液壓約束活塞發(fā)動(dòng)機(jī)主運(yùn)動(dòng)系統(tǒng)間隙誤差影響分析
- 基于模型設(shè)計(jì)的電動(dòng)助力轉(zhuǎn)向系統(tǒng)策略研究
- 轉(zhuǎn)套式配流系統(tǒng)配流口與泵腔空化特性對(duì)比分析
- PMSM驅(qū)動(dòng)的柔性關(guān)節(jié)機(jī)器人命令濾波模糊控制