非等間距隨機(jī)振蕩序列水質(zhì)參數(shù)灰色預(yù)測(cè)模型研究
2020-05-28 08:08:10廉宇峰孫宏亮李丙林韓丹丹唐重和
中國(guó)管理信息化 2020年9期
廉宇峰,孫宏亮,李丙林,韓丹丹,唐重和,董 冰,劉 格
(1.長(zhǎng)春工業(yè)大學(xué) 電氣與電子工程學(xué)院,長(zhǎng)春 130012;2.長(zhǎng)春市市政工程設(shè)計(jì)研究院,長(zhǎng)春130000;3.吉林省計(jì)量科學(xué)研究院,長(zhǎng)春 130103;4.西門(mén)子工廠自動(dòng)化工程有限公司,長(zhǎng)春130012;5.江鈴汽車(chē)股份有限公司,南昌 330001)
0 引言
隨著經(jīng)濟(jì)的發(fā)展和城市化進(jìn)程的加快,水污染問(wèn)題變得越來(lái)越嚴(yán)重。水質(zhì)的發(fā)展趨勢(shì)對(duì)水污染的控制和防治至關(guān)重要。水質(zhì)監(jiān)測(cè)與預(yù)測(cè)是水環(huán)境管理中最重要的技術(shù)。水質(zhì)可以通過(guò)在線檢測(cè)儀器對(duì)電導(dǎo)率、pH、氧化還原電位、濁度、溫度等水質(zhì)參數(shù)進(jìn)行監(jiān)測(cè)與分析[1,2]。雖然水質(zhì)參數(shù)可以由傳感器等相關(guān)檢測(cè)儀器直接測(cè)量,但由于技術(shù)、物理和經(jīng)濟(jì)原因,這些傳感器不是任何地方都可以安裝的。在沒(méi)有在線測(cè)量設(shè)備的條件下,有必要開(kāi)發(fā)和應(yīng)用水質(zhì)預(yù)測(cè)技術(shù)。為了間接獲取水質(zhì)參數(shù)信息,人們提出了數(shù)理統(tǒng)計(jì)[3]、灰色系統(tǒng)理論[4]、神經(jīng)網(wǎng)絡(luò)模型[5]、水質(zhì)模擬模型[6]等多種水質(zhì)參數(shù)預(yù)測(cè)方法。在眾多預(yù)測(cè)方法中,灰色系統(tǒng)理論以其利用較少信息來(lái)獲取系統(tǒng)演化規(guī)律的優(yōu)勢(shì)被廣泛用于水質(zhì)預(yù)測(cè)與評(píng)估領(lǐng)域中。利用灰色系統(tǒng)理論建立的灰色模型(Grey Model,GM)被廣泛應(yīng)用于水質(zhì)預(yù)測(cè)當(dāng)中。 GM(1,1)模型是由鄧聚龍教授提出的最經(jīng)典的灰色模型之一,除用于水質(zhì)預(yù)測(cè)外,還被廣泛應(yīng)用于其他領(lǐng)域[7]。但不同水質(zhì)指標(biāo)的變化存在不確定性,尤其是振蕩性。GM(1,1)的還原公式是嚴(yán)格單調(diào)的齊次指數(shù)函數(shù)。因此,GM(1,1)很難用于預(yù)測(cè)不同環(huán)境下的水質(zhì)參數(shù)。幸運(yùn)的是,針對(duì)隨機(jī)振蕩序列,一種基于光滑算子的傳統(tǒng)隨機(jī)振蕩序列灰色預(yù)測(cè)模型被提出,即 ROGM(1,1)模型[8]。對(duì)于非單調(diào)序列,GM(1,1)較差的預(yù)測(cè)性能可以得到很好的改善。此外,一些水質(zhì)參數(shù)的收集為離線采集。由于技術(shù)、物理和經(jīng)濟(jì)原因,這些參數(shù)并不是實(shí)時(shí)測(cè)量的結(jié)果。同時(shí),水質(zhì)的原始數(shù)據(jù)往往是非等距序列,大大影響了水質(zhì)預(yù)測(cè)模型的預(yù)測(cè)性能。因此,傳統(tǒng)的ROGM(1,1)需要進(jìn)一步改進(jìn),以適應(yīng)不同環(huán)境下的水質(zhì)參數(shù)預(yù)測(cè)。
1 非等間距隨機(jī)振蕩序列灰色預(yù)測(cè)模型
信息不完全和不準(zhǔn)確是不確定系統(tǒng)的基本特征。由已知信息和未知信息構(gòu)成的樣本較少的不確定系統(tǒng)是灰色系統(tǒng)理論的研究對(duì)象。灰色系統(tǒng)理論可以從較少的樣本中提取有用信息,實(shí)現(xiàn)系統(tǒng)的正確運(yùn)行,并描述系統(tǒng)的演化規(guī)律。用灰色系統(tǒng)理論建立的灰色模型適用于等間距序列,而不適用于非等間距序列。因此,在灰色系統(tǒng)建模之前,需要將非等距序列轉(zhuǎn)化為等間距序列。本文提出了一種非等間距隨機(jī)振蕩序列水質(zhì)參數(shù)預(yù)測(cè)模型,即NEROGM(1,1),并將其應(yīng)用于具有離線測(cè)量信息的水質(zhì)預(yù)測(cè)系統(tǒng)。該灰色預(yù)測(cè)模型的構(gòu)建過(guò)程如圖1所示。

圖1 非等間距隨機(jī)振蕩序列水質(zhì)參數(shù)預(yù)測(cè)模型建模流程圖
非等間距隨機(jī)振蕩序列作為水質(zhì)參數(shù)的原始數(shù)據(jù),首先將其轉(zhuǎn)化為等間距隨機(jī)振蕩序列。其次,利用振幅壓縮將等間距隨機(jī)振蕩序列轉(zhuǎn)化為等間距平滑序列。然后,通過(guò)累加計(jì)算得到一個(gè)新的等間距平滑序列。第四,對(duì)模型參數(shù)進(jìn)行估計(jì),并對(duì)離散灰色模型DGM(1,1)進(jìn)行建模。第五,通過(guò)模型約簡(jiǎn)得到等間距隨機(jī)振蕩預(yù)測(cè)序列。最后,通過(guò)等間距序列進(jìn)行反變換得到非等間距隨機(jī)振蕩預(yù)測(cè)序列NEROGM(1,1)。
1.1 非等間距變換
設(shè) X(0)=[x(0)(t1),x(0)(t2),…,x(0)(tn)]為一非等間距序列,則其對(duì)應(yīng)的等間距序列為:


1.2 等間距隨機(jī)振蕩序列灰色預(yù)測(cè)模型
通過(guò)定義2,將等間距隨機(jī)振蕩序列變換成等間距平滑序列。


通過(guò)定義3,對(duì)等間距平滑序列進(jìn)行累加生成計(jì)算,獲得新數(shù)據(jù)序列。
結(jié)合 Y(0)和 Y(1),離散灰色模型 DGM (1,1) 可建立如下式形式:

式中,β1和β2為模型參數(shù),其值可通過(guò)最小二乘法估計(jì)獲得;具體公式如下:


當(dāng) y(1)(1)=y(tǒng)(0)(1)時(shí),離散灰色模型 DGM (1,1) 的還原式如下:

通過(guò)定義4,離散灰色模型DGM(1,1)的還原函數(shù)表達(dá)式為:

通過(guò)定義2,針對(duì)等間距隨機(jī)振蕩序列,可獲得傳統(tǒng)的ROGM (1,1)模型:


1.3 等間距變換
考慮公式(2),則傳 統(tǒng)的 ROGM (1,1)模 型(9)可變換為NEROGM(1,1):


2 水質(zhì)參數(shù)預(yù)測(cè)系統(tǒng)構(gòu)建與實(shí)驗(yàn)
2.1 水質(zhì)參數(shù)預(yù)測(cè)系統(tǒng)
基于提出的NEROGM(1,1)模型,設(shè)計(jì)了一個(gè)水質(zhì)參數(shù)預(yù)測(cè)系統(tǒng)。如圖2(1)所示,河中有三個(gè)監(jiān)測(cè)點(diǎn)。水質(zhì)預(yù)測(cè)系統(tǒng)由監(jiān)控 PC、S7-200 SMART PLC 和測(cè)量傳感器組成,如圖 2(2)所示。水質(zhì)參數(shù)可以通過(guò)測(cè)量傳感器測(cè)量,如pH、溶解氧(DO)、H2S、CH4等。為了方便多點(diǎn)測(cè)量,水質(zhì)參數(shù)檢測(cè)傳感器安裝在一個(gè)離線儀器中。水質(zhì)參數(shù)可通過(guò)無(wú)線網(wǎng)絡(luò)傳輸至S7-200 SMART PLC,并由監(jiān)控計(jì)算機(jī)進(jìn)行監(jiān)控。由于水質(zhì)參數(shù)是離線檢測(cè)的,所提出的NEROGM(1,1)可以利用離線測(cè)量數(shù)據(jù)對(duì)河流的水質(zhì)參數(shù)進(jìn)行預(yù)測(cè)。

圖2 水質(zhì)參數(shù)預(yù)測(cè)系統(tǒng)
2.2 實(shí)驗(yàn)結(jié)果與分析
研究工作采用2018年離線儀器測(cè)量的pH、溶解氧(DO)等參數(shù),如表1所示。表1顯示了5月16日至10月14日的9天數(shù)據(jù)。通過(guò)非等距序列變換,可以得到pH和DO的新的等距序列,如表1所示。如圖 3(1)、圖 3(2)所示,分別給出 pH和 DO的非等間距序列和等距序列。無(wú)論哪個(gè)參數(shù),由非等間距序列變換得到的pH和DO等間距序列均可視為隨機(jī)振蕩序列。對(duì)于等間距序列,由式(9)可得 ROGM(1,1)的模型值,由式(11)可分別計(jì)算NEROGM(1,1)的模型值,如表2所示。原始序列與模型值之間的絕對(duì)誤差和相對(duì)誤差都很小。NEROGM(1,1)對(duì)pH值的平均相對(duì)誤差在1%~5%之間,準(zhǔn)確度接近1級(jí)。NEROGM(1,1)對(duì)DO的平均相對(duì)誤差小于1%,精度等級(jí)為1級(jí)。這些數(shù)據(jù)表明,所提出的NEROGM(1,1)在水質(zhì)擬合中是有效和可行的。如圖 3(3)、圖 3(4)所示,NEROGM(1,1)的擬合值可以很好地逼近原始序列,而NEROGM(1,1)的實(shí)際值與預(yù)測(cè)值之間的絕對(duì)誤差和相對(duì)誤差相對(duì)較大。NEROGM(1,1)對(duì)pH和DO的預(yù)測(cè)值分別列于表3。NEROGM(1,1)對(duì)pH和DO的平均相對(duì)誤差都在5%到10%之間,準(zhǔn)確度接近2級(jí)。利用原序列擬合原序列,對(duì)已知的原序列擬合效果較好。然而,使用原始序列預(yù)測(cè)數(shù)據(jù),會(huì)有一些誤差。雖然預(yù)測(cè)過(guò)程中存在一些誤差,但NEROGM(1,1)的平均相對(duì)誤差均小于20%,可以作為預(yù)測(cè)模型對(duì)水質(zhì)參數(shù)進(jìn)行預(yù)測(cè)。這些數(shù)據(jù)表明,所提出的NEROGM(1,1)在水質(zhì)預(yù)測(cè)中也是有效和可行的。

表1 原始非等間距序列與變換后的等間距序列

表2 NEROGM (1,1)模型擬合值

續(xù)表2
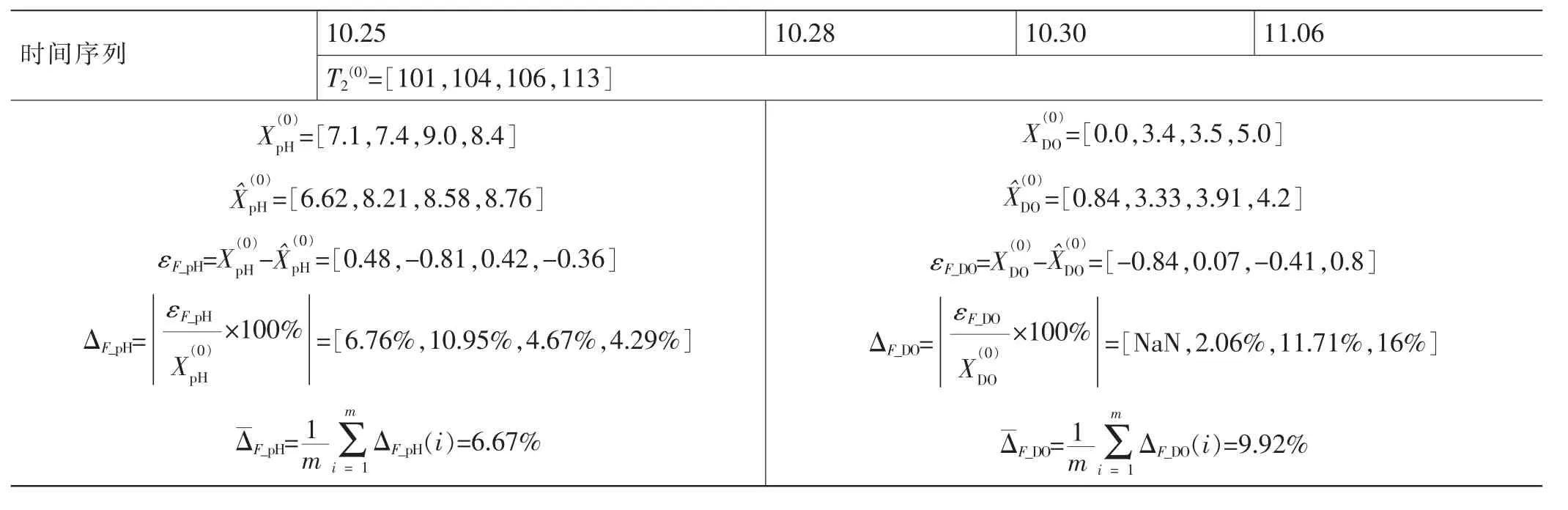
表3 NEROGM (1,1)模型預(yù)測(cè)值

圖3 序列變換與NEROG(1,1)模型預(yù)測(cè)
3 結(jié)論
本文提出了一種基于非等間距隨機(jī)振蕩序列灰色預(yù)測(cè)模型的水質(zhì)參數(shù)系統(tǒng),可以有效地改善預(yù)測(cè)模型誤差大的問(wèn)題。在無(wú)法實(shí)現(xiàn)對(duì)河流水質(zhì)的實(shí)時(shí)監(jiān)測(cè)的條件下,該系統(tǒng)實(shí)現(xiàn)了對(duì)河流水質(zhì)參數(shù)的預(yù)測(cè)。所提出的NEROGM(1,1)能夠較好地逼近原始序列,對(duì)水質(zhì)參數(shù)具有較好的預(yù)測(cè)效果,對(duì)水環(huán)境管理具有一定的指導(dǎo)意義。在水質(zhì)參數(shù)預(yù)測(cè)系統(tǒng)中除了水質(zhì)預(yù)測(cè)外,沒(méi)有給出水質(zhì)評(píng)價(jià)方法。因此,需要在該水質(zhì)預(yù)測(cè)系統(tǒng)中開(kāi)發(fā)和應(yīng)用水質(zhì)
評(píng)價(jià)的理論方法,使整個(gè)系統(tǒng)的功能更加完善。這項(xiàng)工作有待今后進(jìn)一步研究改進(jìn)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
環(huán)境(2023年5期)2023-06-30 01:20:01
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
當(dāng)代水產(chǎn)(2019年1期)2019-05-16 02:42:04
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
- 中國(guó)管理信息化的其它文章
- 財(cái)經(jīng)類(lèi)高校大數(shù)據(jù)實(shí)驗(yàn)室建設(shè)管理探析
- 基于信息化平臺(tái)的“外貿(mào)單證實(shí)務(wù)”教學(xué)方法應(yīng)用研究
- 大數(shù)據(jù)背景下應(yīng)用型本科院校市場(chǎng)營(yíng)銷(xiāo)專業(yè)教學(xué)改革
- “基礎(chǔ)會(huì)計(jì)”課程思政的內(nèi)在邏輯與元素挖掘
- 基于體驗(yàn)式教學(xué)模式的管理信息化課程實(shí)踐與研究
- 高職財(cái)經(jīng)專業(yè)學(xué)生職業(yè)技能與職業(yè)精神融合培養(yǎng)思考