基于視覺與IMU融合的機器人位姿修正方法研究
2020-05-31 12:03:50王曉云
黑龍江工業學院學報(綜合版) 2020年3期
王曉云
(安徽信息工程學院,安徽 蕪湖 241000)
隨著智能控制技術的發展,雙足機器人的自主控制能力不斷提升[1]。雙足機器人的智能控制建立在位姿修正的基礎上,采用空間三維位姿參數分析方法進行雙足機器人的遠程遙控控制,能夠提高機器人的自適應控制能力。由于在對雙足機器人進行自動化控制過程中,容易受到機器的環境因素的干擾,導致雙足機器人的位姿修正效果并不好[2]。為了提高雙足機器人的位姿修正效果,本文提出基于視覺與IMU融合的機器人位姿修正方法。構建機器人位姿參數分布模型,利用視覺與IMU融合方法進行自主遙控雙足機器人的結構參數辨識模型構建和位姿修正,最后進行仿真測試,展示了本文方法在提高機器人位姿修正能力方面的優越性能。
1 機器人動力學模型和位姿參數尋優
1.1 構建自主遙控雙足機器人動力學模型
為了實現自主遙控雙足機器人位姿修正優化,需要采用姿態傳感器構建機器人的運動姿態參數模型[3],結合嵌入式邏輯控制方法進行機器人的運動學模型設計,得到自主遙控雙足機器人位姿修正的結構模型如圖1所示。
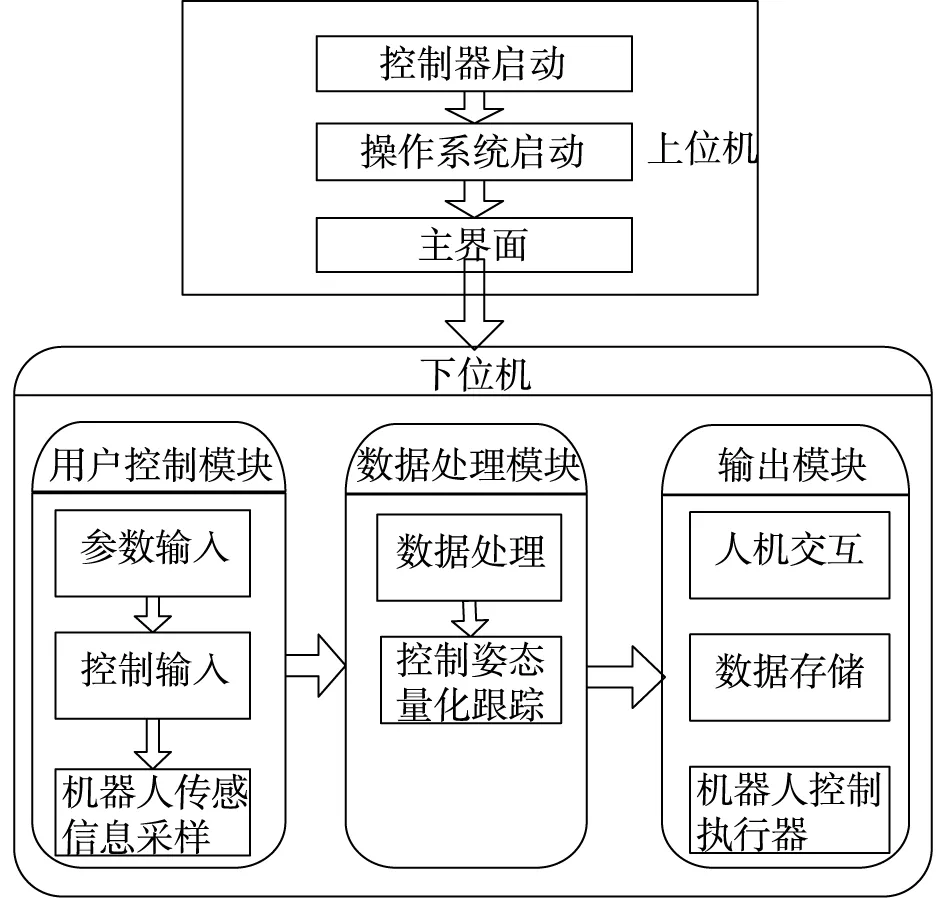
圖1 自主遙控雙足機器人位姿修正的結構模型
以圖1所示的自主遙控雙足機器人位姿修正的結構模型為基礎,采用視覺特征信息采樣方法進行機器人位姿信息采集[4],結合標準卡爾曼濾波模型,構建自主遙控雙足機器人控制模糊迭代方程為:
(1)
假設自主遙控雙足機器人的末端位姿分布是一個運動模型,根據模糊荷載參數融合方法,得到機器人的反饋調節模型為:
(2)
(3)
構建自主遙控雙足機器人的動力學模型,表示為:
(4)
1.2 位姿參數尋優
采用三維視覺信息跟蹤識別方法進行自主遙控雙足機器人的運動學模型的優化設計[6],構建機器人動力學模型f(x)是關于x=WVD(n,k(n))的關節力矩增益控制函數,因此機器人的空間視覺特征參數分布滿足:
δ·p1-2p2+ρ2A2-δρ1A1+c2+cr=0
(5)
ρ2(p2-c2-cr)-δ·(1-δ)μ2A2=0
(6)
(7)

(8)
采用自適應參數控制方法,進行自主遙控雙足機器人的模糊度控制,得到位姿優化參數m(A)滿足:
(9)
(10)
2 機器人的位姿修正優化
2.1 機器人控制誤差補償
采用三維視覺信息跟蹤識別方法進行自主遙控雙足機器人的運動學模型的優化設計,構建參數辨識模型,得到機器人的運動平面,其狀態函數為:
(11)
考慮系統剛體特征,進行機器人的視覺參數調節,得到自主遙控雙足機器人位姿修正的線性化處理模型為:
(12)
其中,自主遙控雙足機器人位姿修正的穩定性平衡點滿足:
(13)
根據線性化優化控制結果,進行自主遙控雙足機器人的模糊參數優化辨識[9-10],得到辨識函數為:
(14)
結合耦合狀態尋優方法,進行自主遙控雙足機器人的控制誤差補償,得到控制誤差補償模型滿足:
(15)
當([pHj,pLj])?([pHi,pLi])時,在該工作點處進行平衡控制狀態。
2.2 位姿修正輸出
根據阻尼力矩位姿修正方法進行自主遙控雙足機器人的力學結構特征分析,結合視覺與IMU融合方法,得到慣性誤差項滿足e-Lms=1-LmS,在機器人質心坐標系中,引入前饋補償法得到機器人模糊控制函數,描述為Gm(s)=G0(s),時滯誤差為tm=τ,自主遙控雙足機器人的視覺IMU融合狀態函數為:
H(s)+Y(s)=Gm(s)U(s)
(16)
采用空間聯合控制和參數調節方法進行自主遙控雙足機器人的運動學參數尋優,構建機器人結構參數調節的優化參數辨識模型,表示為:
(17)
上式中,機器人的空間跨度參數從端輸出到控制器中,采用迭代學習方法進行自主遙控雙足機器人的力矩控制:
(18)
構建機器人的末端載荷參數辨識模型,得到自主遙控雙足機器人延遲環節分布為:
(19)
基于視覺與IMU融合方法,進行自適應反饋調節,得到機器人位姿修正模型為:
(20)
綜上分析,實現對機器人的位姿修正。
3 仿真實驗與結果分析
為了測試本文設計方法在實現機器人位姿修正中的應用性能,進行仿真實驗。采用Matlab軟件進行仿真分析,設定自主遙控雙足機器人姿態數據的采樣頻率為12KHz,模糊度系數為0.25,機器人物理環境數據長度為1200,機器人位姿參數采樣的截止頻率為120Hz,視覺分布的像素集為120*120,機器人的實驗場景如圖2所示。

圖2 實驗場景
根據上述實驗參數和仿真場景,進行自主遙控雙足機器人的位姿參數修正,得到位置參數、速度參數、加速度參數及誤差仿真結果如圖3所示。
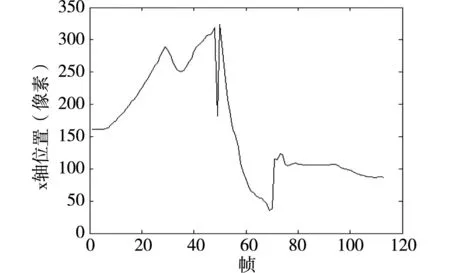
a 位置參數
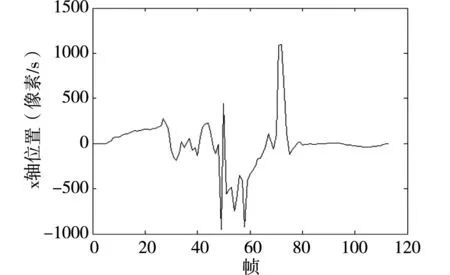
b 速度參數
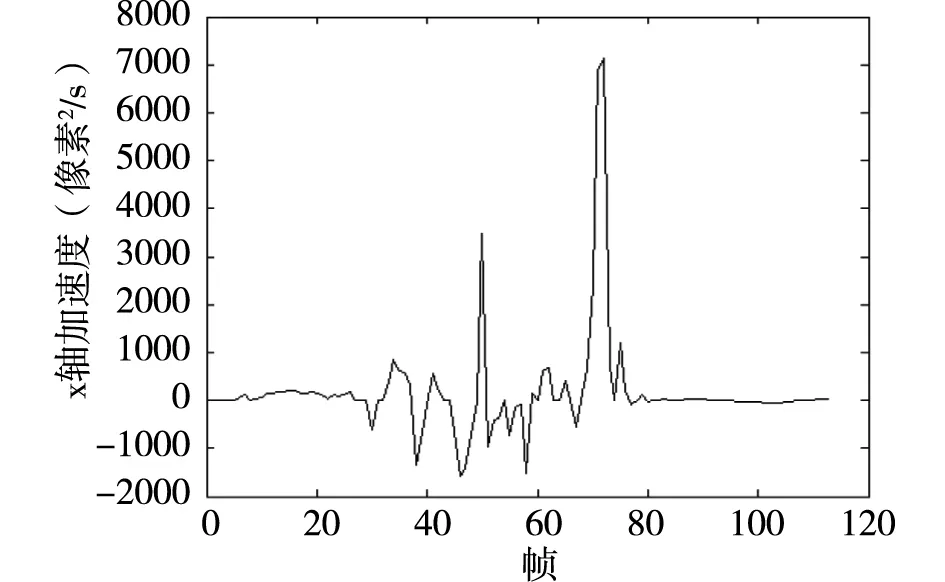
c 加速度參數
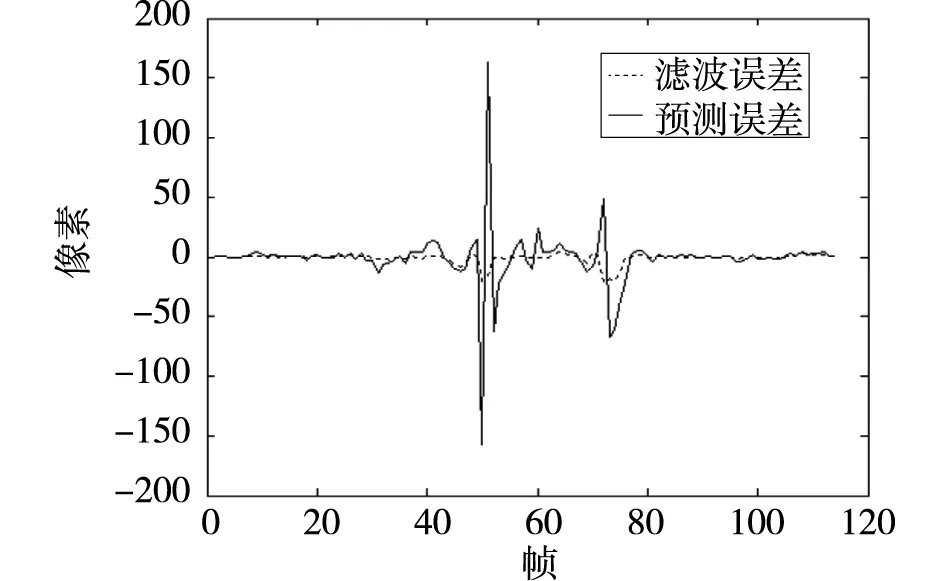
d 位姿誤差圖3 位姿參數修正結果及誤差
分析圖3得知,本文方法能有效實現機器人位姿修正,位姿參數修正精度較高,位姿修正能力較好,提高了機器人的自動化控制能力。
結語
本文提出基于視覺與IMU融合的機器人位姿修正方法。根據模糊荷載參數融合方法,得到自主遙控雙足機器人的反饋調節模型,采用自適應振蕩誤差分析方法構建標準卡爾曼濾波模型,實現機器人參數融合和視覺特征重構。采用三維視覺信息跟蹤識別方法進行機器人運動學模型的優化設計,根據阻尼力矩位姿修正方法進行機器人力學結構特征分析,結合視覺與IMU融合方法實現自主遙控雙足機器人的結構參數辨識模型構造和位姿修正。仿真實驗結果顯示,采用該方法進行機器人位姿修正的精度較高,位姿校正效果較好,提高了機器人的自動化控制能力,取得了更好的應用效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代出版(2020年3期)2020-06-20 07:10:34
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34