西航一號無人機性能分析及改進
2020-06-01 05:14:02李繼廣唐成虎張兆楊李浩東
西安航空學院學報 2020年1期
李繼廣,唐成虎,閆 鵬,路 南,張兆楊,李浩東
(西安航空學院 飛行器學院, 西安 710077)
0 引言
近年來,無人機技術獲得極大的發展和廣泛的應用[1-2]。隨著智能技術和控制技術的發展以及人力成本提高,無人機必將在更多的領域發揮更大的作用,如地質普查、巡線、航拍、物流、快遞等領域[3-5]。
固定翼無人機具有飛行速度快、航程/航時長、任務載荷大等優點,廣泛應用于民用航空領域[6-8]。西安航空學院通用航空工程技術中心立足于民用航空應用需求,采用計算機輔助設計、全數字化制造、3D增加制造、復合材料制造等主流先技術,獨立研發了新一代無人機產品——西航一號無人機。西航一號無人機作為一款全新的機型,在試飛過程中表現出一些不足之處。本文以該無人機的試飛結果為依據,分析了該無人機前期設計的不足,并針對存在問題,提出改進方案。
1 西航一號無人機特性分析
西航一號無人機的設計定位是長航時、多用途民用無人機。設計要求包括較大的航時、較大的機身裝載空間、方便運輸使用的模塊化設計、靈活的任務載荷更換能力、滿足野外簡易跑道使用要求的優良起降性。為了滿足以上設計需求,該無人機采用翼身融合體升力體布局,同時設計了可拆卸的機翼和尾翼,使得該機整體分為六個獨立的部分,方便儲藏和運輸。為了保證優良的起降性能,將該機的尾翼設計為“尾撐式平+雙垂尾”結構。該機的設計特點還包括以下方面。
1.1 總體特性分析
1.1.1 滿足較大裝載空間要求的高升阻比總體設計
該機使用常規布局形式,但為了滿足裝載空間的要求并提高升阻比,無人機采用“升力體機身+翼身融合+大展弦比機翼+尾撐式尾翼”的氣動布局設計。此種設計具有裝載空間大、結構重量輕、氣動效率高、穩定性和操縱性好等優點。升力體機身設計保證了該無人機長航時飛行所需要的增升、減阻,提高升阻比等氣動設計重要目標。
1.1.2 升力體機身設計
采用的是升力體機身,保證了對油箱和設備的裝載。機身主要采用大厚度的對稱面結構和RY-100翼型作為機身的控制面,通過截面水平引導線和截面垂直引導線相合產生機體的縱向控制線來確定機身的輪廓線,“升力體機身+翼身融合+大展弦比機翼”的設計相對于常規設計減少了阻力系數,增大了升阻比。
1.1.3 尾撐式布局形式
西航一號無人機的尾翼使用了抬高平尾的尾撐式布局形式。對于尾翼的翼型,在垂尾上采用常用的NACA0010和NACA0006對稱翼型,而在平尾上使用了常用的NACA0012對稱翼型。這種尾翼設計方式保證了無人機的起降性能,增加了舵面的操縱效率。同時,高尾撐平尾避免了螺旋槳滑流對操縱的不利影響,提高了大迎角飛行能力。如圖1所示。

圖1西航一號無人機總體設計圖
1.2 氣動特性計算分析
對初始估算模型進行數值模擬檢驗,采用CFD數值模擬的方法對無人機的氣動特性進行計算。其計算狀態為:Ma=0.075,H=2km,Re=2.85×105,計算網格采用多塊結構網格,考慮到粘性計算需要,物面第一層網格距離物面約為1×10-5m,保證近物面y+≈1,加密機翼前后緣及機翼垂尾與機身連接處的網格密度,計算網格量為460萬。為了保證計算數據的可靠,設計過程采用了數值模擬的結果與工程經驗公式估算結果相互對比驗證的方式,如圖2—圖4所示。

圖2 初始模型結構網格圖
圖3數值模擬與估算升力特征曲線對比圖

圖4數值模擬與估算阻力特征曲線對比圖
從數值計算與工程經驗公式估算結果的對比中可知,兩種計算方法獲得數據基本相同,說明計算結果具有較高的可信性。但是,采用常規布局經驗公式時,估算的升力系數在小迎角范圍內大于CFD計算值,其主要原因是采用正常式布局估算時,升力體機身對尾翼的影響結果估算較小所致。對于阻力系數的估計來看,阻力的估計值較為準確。其估算結果與數值模擬的結果趨勢接近,可以作為初始布局的設計依據。
1.3 飛行性能計算校核
根據氣動計算結果,對該無人機總體設計性能進行校核檢驗。
1.3.1 起降階段校核
當無人機返航時,其最大飛行速度不能大于90km/h,在這種狀態下要求無人機不能失速。

則在攔阻降落時的速度時:
CL=2*W/pv2S=35*9.8/0.5*0.1225/*(90/3.6)2*1.2=0.749
1.3.2 巡航時間
無人機航程采用布雷蓋(Breguet)公式進行航時估計。考慮到初始構型并未使用光電轉塔等外部設施,其巡航升阻比應遠小于計算所得的13.2,按其70%計算,其巡航升阻比約為9.24,此時估算的巡航航時為:
t=1550(K/Vme)(η/Ce)[1-(Wfi/W0)0.1]
=1550(11/100)*(0.8(0.42/1.34))[1-(24/35)0.1]
=16.29h
1.4 設計飛行性能
在掌握西航一號無人機的氣動特性之后,需要確定該無人機的飛行包線。確定飛行包線如圖5所示。
該無人機飛行性能參數如表1所示。

圖5 西航一號無人機飛行包線

表1 西航一號無人機飛行性能參數
設計起飛重量下,在3000m巡航高度以有利速度飛行時,即升阻比最大所對應的速度,飛機具有最大航程約為1096.28km。飛機以經濟速度飛行時,即需用功率最低點對應的速度,飛機具有的最大航時約為8.79h。當飛機減少2kg燃油重量,仍可以達到續航7小時的飛行要求。因此,以上飛行性能參數均達到總體設計指標。
2 西航一號無人機試飛驗證和分析
2.1 飛行試驗
西航一號無人機試飛現場如圖6所示。

圖6(a) 試飛前調試 圖6(b) 空中飛行的無人機
環境條件:起飛逆風,平均風速3~4級,最大風速5~6級;跑道條件:砂礫硬質跑道,道面有小石子,硬化條件一般。
試飛結果分析:飛行過程中,無人機的速度如圖7所示。

圖7 無人機飛行速度
從圖7可知,無人機飛行中的速度在16~32m/s之間,速度偏差主要來源于風速的影響。4級風速一般為5.5~7.9m/s,則無人機平飛的速度大概為22~26m/s。飛行過程中,無人機的高度如圖8所示。
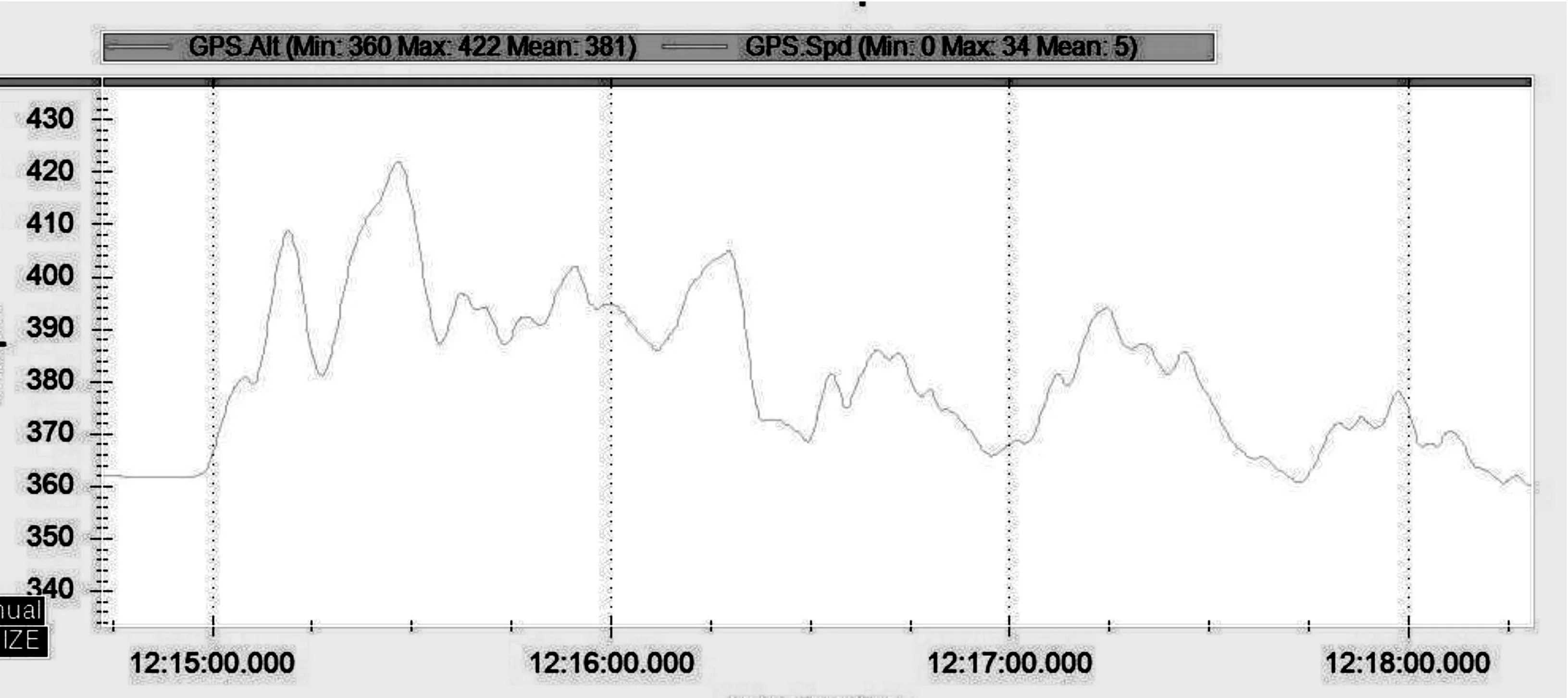
圖8 無人機飛行高度
從圖8可知,無人機飛行中的最大高度為65m。由于無人機是逆風起飛,結合速度圖可知無人機的起飛速度為24m/s左右。飛行過程中,由飛行數據可知,飛行過程中姿態整體保持穩定。無人機的滾轉角和俯仰角如圖9所示。

圖9 (a) 無人機滾轉角度
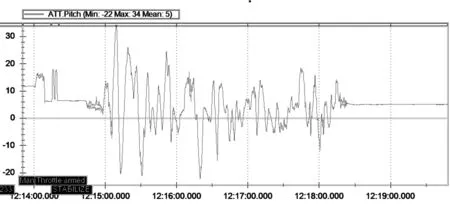
圖9 (b) 無人機俯仰角度
2.2 航模手評價
起飛大概一分半內在用舵面配平飛機。無人機低頭較嚴重,且伴隨左滾轉。調整完成后,俯仰操縱感覺比較好,滾轉操縱效果比預想的差。整體感覺,無人機飛行過程中操縱適中。
2.3 試飛結果分析
從試飛結果可知,無人機巡航速度為32m/s,與設計時速相等,證明了總體設計和性能計算結果是可信的。同時,該無人機在16m/s的速度下可以保持飛行穩定,證明了該機優良的低速穩定性能和低速操縱性能。該性能是無人機起飛、著陸性能的重要指標,也證明了該機優良的起降性能。另外,大風條件下的成功飛行,也證明了該機雙垂尾、翼梢小翼設計方案優良的抗側風能力。這些試飛數據證明了總體設計是合理的,性能計算數據是正確的。
2.4 試飛過程發現的問題
2.4.1 俯仰穩定性不足問題
在試飛過程中,升降舵位于中位時,無人機有比較嚴重的低頭趨勢。為了配平無人機飛行中的俯仰穩定,升降舵需要7度的配平角度。分析問題產生原因是無人機俯仰穩定性不足所致。
2.4.2 橫向穩定性過大問題
在試飛過程中,無人機轉彎過程比較緩慢,對轉彎航路跟蹤存在誤差。分析問題產生原因是該無人機采用雙垂尾和小翼設計,使得無人機的橫側向穩定性偏大,無人機轉彎靈活性不足所致。
2.4.3 發動機過熱問題
該問題發現于無人機地面發動機極限測試過程中。在發動機進行大功率、長時間工作時,發動機散熱并在發動機周圍聚集,使得發動機溫度過熱,從而導致發動機熄火。分析問題產生原因是無人機尾部發動機安裝底座阻擋了發動機工作熱量的耗散,進而引起發動機過熱所致。
3 西航一號無人機總體設計改進
3.1 對俯仰穩定性不足的改進
無人機俯仰穩定性不足主要是穩定裕度不足造成的,即無人機重心相對氣動焦點靠前的距離過短。對于無人機俯仰穩定性不足問題,解決方案有兩個:(1)將無人機重心位置配平到更加靠前的位置;(2)調整無人機氣動焦點位置,使其向后移動。
然而,由于機身較短,以及材料、制造工藝的限制,無人機重心位置向機頭方向配平存在困難。該無人機各系統重量及各系統重量對重心位置的影響如表2所示。

表2 無人機重心位置監控表
續表2

序號系統結構名稱質量(kg)重心位置(X軸,mm)質量矩(Kg.mm)10飛控0.529814911電源管理系統0.349014712發動機1.51200180013動力系統螺旋槳0.2122024414燃油6660396015配重配重塊11200200合計25.0517064.8重心位置(mm)681.2
從無人機重心位置監控表可知,無論是采取減輕各系統結構重量或者增加配重的方式,都難以使得無人機的重心位置前移。因此,針對該問題的解決方法為將無人機的氣動焦點位置后移。具體改進方法為將無人機水平尾翼安裝角度由原來的0度增加到1.5度。
3.2 橫向穩定性的改進
橫向穩定性過大主要是該無人機采用雙垂尾和雙翼梢小翼所致,使得無人機的航向穩定過大。改進方案為減小無人機翼梢小翼面積。
3.3 解決發動機過熱問題
為動機設計的進氣散熱道解決了發動機過熱問題,如圖10所示。
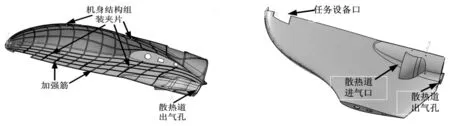
圖10(a) 一體化蒙皮-散熱道側視圖 圖10(b) 一體化蒙皮-散熱道仰視圖
4 結語
本文總結了西航一號無人機的設計特點,分析了該無人機總體設計特性、氣動性能和飛行性能,通過飛行試驗發現了該無人機存在的問題,并針對存在問題提出了解決方案,如表3所示。
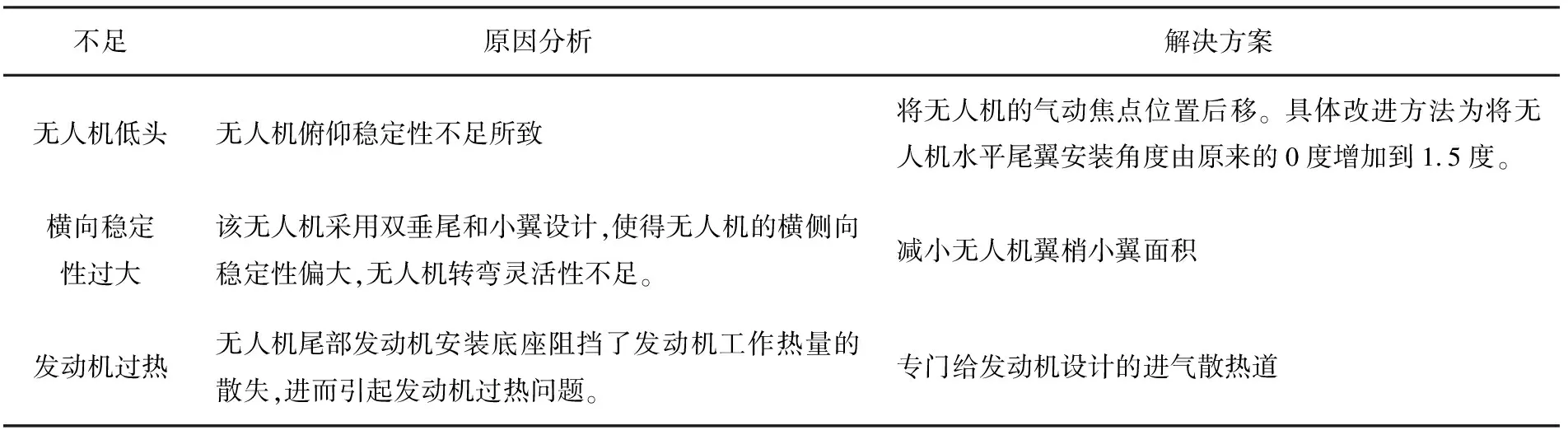
表3 西航一號無人機存在問題解決方案
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
