基于降階模型的翼型顫振主動抑制研究
2020-06-01 05:15:06高國柱
西安航空學(xué)院學(xué)報 2020年1期
高國柱,周 萌
(中國電子科技集團公司第三十八研究所 浮空平臺部,合肥 230088)
0 引言
隨著飛行器設(shè)計技術(shù)的發(fā)展以及對飛行包線運用的日益擴大,顫振問題在飛行器設(shè)計中越來越受到重視并成為研究熱點。目前在工程中以線性無黏化假設(shè)的偶極子網(wǎng)格法分析非定常氣動力,再耦合計算結(jié)構(gòu)動力學(xué)(Computational Structural Dynamics,CSD)建立氣動彈性分析系統(tǒng)求解顫振,但在跨聲速時該方法的預(yù)測精度大幅下降。而基于計算流體動力學(xué)(Computational Fluid Dynamics,CFD)耦合計算結(jié)構(gòu)動力學(xué)的高精度氣動彈性分析方法迅速發(fā)展,成為研究人員分析與改善跨聲速顫振問題時的首選。但是,基于CFD/CSD的高精度氣動彈性時域分析方法計算效率低下,嚴重制約著其在工程中的應(yīng)用,而基于系統(tǒng)辨識的降階模型(Reduce-order Model, ROM)是解決這一問題的主要方法之一。
系統(tǒng)辨識降階模型的原理是輸入外部位移信號q(t)激勵系統(tǒng),通過CFD求解器得到系統(tǒng)的時域響應(yīng)f(t),在此過程中,不關(guān)心CFD求解器的求解過程,全程將其看作是一個黑箱子,然后根據(jù)輸入信號和系統(tǒng)由輸入信號得到的氣動力響應(yīng)構(gòu)建相應(yīng)的映射關(guān)系,從而建立ROM,基于自回歸滑動平均模型(Auto-Regressive Moving Average Model,ARMA)的非定常氣動力降階模型是一種基于時間序列的降階模型[1],在保持氣動力計算精度的同時計算效率提高了1~2個數(shù)量級。Cowan等人[2]首先將ARMA的非定常氣動力降階模型應(yīng)用到氣動彈性領(lǐng)域,采用3211信號作為激勵信號輸入系統(tǒng),并預(yù)測了跨聲速標準算例AGARD445.6機翼的顫振邊界。Gupta[3]和張偉偉[4]等人也采用該模型開展了跨聲速氣動彈性研究。祝志文等人[5]根據(jù)CFD數(shù)值模擬的輸入和輸出,建立起橋梁斷面繞流系統(tǒng)的離散時間氣動ARMA ROM,進而識別橋梁斷面顫振導(dǎo)數(shù)。Attar等人[6]通過研究,構(gòu)建了能夠描述一定非線性的ARMA ROM。
國內(nèi)外的研究人員在氣動彈性系統(tǒng)辨識方面取得了豐碩的成果,但在基于ROM的顫振抑制方面研究較少。本文耦合開環(huán)氣動彈性分析系統(tǒng)和操縱面模態(tài)對應(yīng)的氣動狀態(tài)空間方程,發(fā)展了一套伺服氣動彈性分析系統(tǒng),為提高顫振邊界進行主動控制律設(shè)計,通過算例驗證了有效性。
1 氣動彈性系統(tǒng)降階模型
將結(jié)構(gòu)運動方程和基于ARMA模型的氣動力降階模型方程聯(lián)立,得到氣動彈性系統(tǒng)的狀態(tài)空間形式的控制方程,文獻[7]:
其中,x表示位移,Aa、Ba、Ca和Da是氣動力降階模型中辨識出的參數(shù),As、Bs和Cs是輸入的結(jié)構(gòu)參數(shù),q表示自由來流動壓,下標s對應(yīng)的是結(jié)構(gòu)參數(shù),下標a對應(yīng)的是氣動力參數(shù)。
在文獻[8-10]中,通過二維兩自由度跨聲速氣動彈性標準算例驗證了該計算方法的精度,證明了該ROM可用于后續(xù)的氣彈分析。
2 氣動彈性顫振主動抑制模型
由式(1)建立的基于ARMA模型的氣動彈性分析,可以將開環(huán)氣動彈性模型改寫為:

由文獻[8]中ARMA降階模型可以建立操縱面模態(tài)所對應(yīng)的氣動狀態(tài)空間方程:
其中,下標ac表示操縱面模態(tài)建立的氣動力降階模型,fac表示輸出的廣義氣動力;Aac、Bac、Cac、Dac表示操縱面模態(tài)氣動力降階模型中辨識出的參數(shù)。
對于控制系統(tǒng)而言,建立一個相應(yīng)的狀態(tài)空間方程:
對式(4)作簡化,即
令xase=[xas,xac],將式(2)(3)(5)串聯(lián)起來可以得到伺服氣動彈性系統(tǒng)的狀態(tài)方程:

本文運用線性二次調(diào)節(jié)器(Linear Quadratic Ragulator, LQR)最優(yōu)化控制律設(shè)計方法設(shè)計了主動顫振抑制系統(tǒng)。
3 顫振主動抑制控制律設(shè)計
研究對象為二維氣動伺服彈性NACA0012翼型,一個相對弦長為25%的操縱面安裝在翼型的后緣作為控制機構(gòu)。采用上述方法設(shè)計控制律作為操縱面運動規(guī)律實現(xiàn)顫振抑制,提高顫振邊界。在計算過程中,忽略控制面對結(jié)構(gòu)的影響,將結(jié)構(gòu)看成一個經(jīng)典的二維兩自由度顫振問題。典型的二維翼型帶控制面的幾何和結(jié)構(gòu)參數(shù)定義如圖1所示,xa表示彈性軸到中心的距離,a表示重心到中心的距離,Ka為翼型關(guān)于剛心的俯仰剛度,Kh為翼型關(guān)于剛心的沉浮剛度,b為參考長度(弦長的1/2),h表示沉浮位移,該構(gòu)型的結(jié)構(gòu)參數(shù)[11]為:M/m=1.0,xa=0.2,ra=0.539,彈性軸位置a=-0.2,頻率比ωh/ωa=0.343,質(zhì)量比μ=100。
翼型后緣控制面偏轉(zhuǎn)角以β(t)表示。引入反饋控制后,β(t)可以通過下式得到:
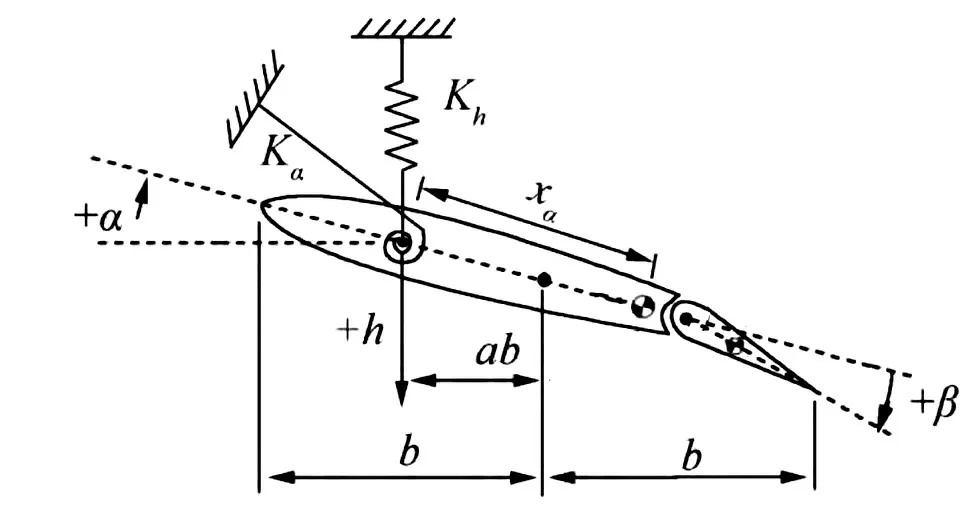
圖1典型的二維翼型帶控制面的幾何和結(jié)構(gòu)參數(shù)定義
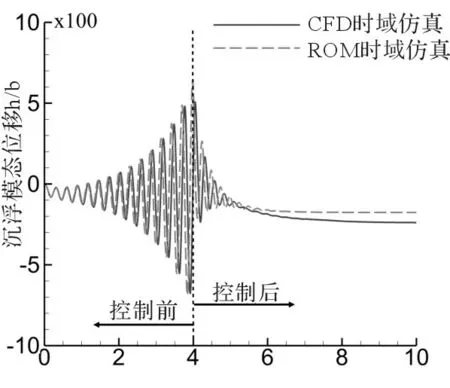
自由來流馬赫數(shù)Ma=0.80時氣動彈性系統(tǒng)仿真結(jié)果如圖2所示,此開環(huán)系統(tǒng)的顫振臨界速度為無量綱顫振速度V/(ωab)=3.54 ,選取顫振點設(shè)計控制律。通過LQR設(shè)計的控制律為k1=0.327、k2=0.134、k3=-2.160、k4=0.169,此時采用頻域計算方法得到閉環(huán)系統(tǒng)的顫振臨界速度為V/(ωab)=4.50 。與開環(huán)的結(jié)果對比,LQR最優(yōu)控制方法將顫振臨界速度從3.54 提高到了4.50 ,即引入反饋控制后,大幅度提高了顫振臨界速度。在Ma=0.80,V/(ωab)=4.0 狀態(tài)下(此速度下開環(huán)系統(tǒng)是不穩(wěn)定的),將設(shè)計的控制律加入到基于ROM模型的氣動彈性時域仿真中,在氣動彈性系統(tǒng)的前4 s,采用開環(huán)系統(tǒng)分析,控制面不偏轉(zhuǎn);當t>4 s時,加入控制系統(tǒng),氣動彈性系統(tǒng)由開環(huán)轉(zhuǎn)為閉環(huán),此時控制面開始偏轉(zhuǎn)。圖2(a)和圖2(b)給出了在控制前后CFD和ROM計算的控制面的結(jié)構(gòu)位移響應(yīng)歷程,從圖中可以看出,在未施加控制之前,CFD和ROM計算的系統(tǒng)的位移響應(yīng)是不斷發(fā)散的,系統(tǒng)是不穩(wěn)定的;在施加控制之后,CFD和ROM計算的系統(tǒng)響應(yīng)不斷收斂,因此閉環(huán)系統(tǒng)是穩(wěn)定的。由此說明了設(shè)計的控制律能有效的抑制顫振導(dǎo)致的系統(tǒng)不穩(wěn)定,提高了顫振邊界,通過CFD和ROM的時域仿真對比可以看出,其位移響應(yīng)歷程基本是一致的,驗證了ROM的精度。
選取每個馬赫數(shù)和相應(yīng)的臨界顫振速度為控制律設(shè)計工況,NACA0012翼型開環(huán)和閉環(huán)顫振邊界對比如圖3所示。結(jié)果表明,設(shè)計的控制率有效地抑制了顫振不穩(wěn)定,閉環(huán)的顫振臨界速度比開環(huán)的顫振臨界速度普遍提高了20%左右。這是由于閉環(huán)系統(tǒng)以前一時刻或前一段時間的沉浮位移響應(yīng)和俯仰位移響應(yīng)為輸入,反饋得到當前時刻操縱面運動規(guī)律而控制操縱面。從能量的角度分析[12],顫振的能量來源于氣動力做功,經(jīng)典顫振問題中不同結(jié)構(gòu)模態(tài)相互耦合從氣流中汲取能量,而后緣操縱面偏轉(zhuǎn)抑制沉浮模態(tài)和俯仰模態(tài)相互耦合從氣流中汲取能量,從而提高顫振邊界。
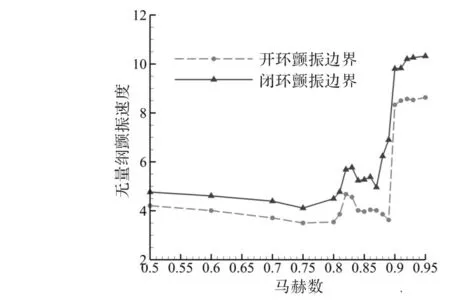
圖3NACA0012翼型開環(huán)和閉環(huán)顫振邊界對比
4 結(jié)語
通過ROM與CFD/CSD的無量綱顫振速度計算結(jié)果,表明基于ROM計算的無量綱顫振速度準確性及精度高,該ROM可用于氣彈分析,為有效抑制翼型顫振提供一種快速評估和設(shè)計方法;通過建立的閉環(huán)氣動彈性分析系統(tǒng)進行控制律設(shè)計,并分別采用ROM技術(shù)和CFD技術(shù)進行數(shù)值模擬,結(jié)果表明:使用開、閉環(huán)氣彈系統(tǒng)時基于ROM和CFD分別仿真時域仿真結(jié)果吻合較好;基于ROM技術(shù)設(shè)計的控制律能夠有效地抑制顫振,閉環(huán)的顫振臨界速度比開環(huán)的顫振臨界速度普遍提高了20%左右。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
湖北經(jīng)濟學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
