一種雷達主瓣復(fù)合干擾盲源分離對抗方法
2020-06-06 10:54:48李軍,高乾,王歡
雷達科學(xué)與技術(shù) 2020年2期
關(guān)鍵詞:信號
李 軍, 高 乾, 王 歡
(1.空軍工程大學(xué), 陜西西安 710051; 2.空軍通信士官學(xué)校, 遼寧大連 116600)
0 引言
針對雷達的跟蹤環(huán)節(jié),自衛(wèi)式干擾通常釋放拖引干擾與壓制干擾的復(fù)合干擾,以達到“隱真示假”的干擾目的[1]。這種情況下,早期的前沿跟蹤、距離保護波門、寬波門跟蹤、記憶波門跟蹤等波門跟蹤策略將失效。現(xiàn)有的大多數(shù)基于目標(biāo)和干擾幅度特征差異的干擾檢測方法[2-3]、利用空時自適應(yīng)和極化處理進行干擾抑制方法[4]以及其他一些信號或數(shù)據(jù)處理的干擾抑制方法[5],都沒有充分地考慮復(fù)合干擾情況。并且,由于干擾與目標(biāo)回波來自同一角度,雷達接收到的是單通道信號,傳統(tǒng)正定或者超定盲源分離算法將失效。針對上述問題,本文提出了一種極化通道擴展與盲源分離相結(jié)合的干擾抑制新方法。先通過極化通道擴展將單通道信號擴展為雙通道信號,再利用盲源分離算法分離目標(biāo)與干擾,可以對真、假目標(biāo)同時跟蹤處理,而不會丟失真目標(biāo)。
1 復(fù)合拖引干擾建模
假設(shè)拖引干擾為jd(t),具有壓制效果的干擾信號為jb(t),則自衛(wèi)式復(fù)合拖引干擾可以表示為
j(t)=jd(t)+ηjb(t)
(1)
式中:jb(t)可以為噪聲調(diào)頻干擾、噪聲卷積/乘積干擾等;η表示jd(t)和jb(t)能量分配關(guān)系,η越大壓制效果越明顯;拖引干擾jd(t)信號形式與雷達發(fā)射信號有關(guān)。
雷達工作于PD體制時,jd(t)通常為距離-速度同步拖引干擾。因為現(xiàn)代PD雷達兼具距離和速度測量能力,可以同時獲得目標(biāo)的距離-速度二維信息,因此單獨的距離或者速度波門拖引干擾對其干擾效果有限。不失一般性,假設(shè)PD雷達發(fā)射單載頻相干脈沖串信號,其信號模型可以表示如下:

(2)
DRFM干擾機距離-速度同步拖引干擾的過程為:首先,對接收到的雷達發(fā)射信號進行下變頻得到基帶信號;然后,對基帶信號進行相位量化、模數(shù)轉(zhuǎn)換并存儲;最后,對存儲在DRFM中的信號進行延時調(diào)制c(t)和多普勒頻率調(diào)制b(t)后進行上變頻并轉(zhuǎn)發(fā),形成對雷達的距離-速度同步拖引干擾,干擾模型可以表示為

ej2π(f0+fd+b(t))(t-c(t))
(3)
式中,fd為目標(biāo)多普勒頻率,c(t)為距離拖引時延函數(shù),b(t)為同步施加的多普勒頻率調(diào)制。實際應(yīng)用中,距離拖引通常在幾秒時間內(nèi)拖動幾個距離波門(μs量級),因此,在一個PD雷達相關(guān)處理間隔(CPI)內(nèi),c(t)通常遠小于Tr,可以用δ(t-nTr)代替式(3)中δ(t-nTr-c(t)),則干擾模型簡化為

ej2π(f0+fd+b(t))(t-c(t))
(4)
2 極化通道擴展建模
自衛(wèi)式復(fù)合拖引干擾條件下,雷達只能接收到一路信號。雷達輔助天線主要用于相干旁瓣對消,為了消除主輔通道交叉極化響應(yīng)不匹配的影響,通常采用垂直和水平兩種輔助天線對消掉干擾信號的垂直和水平分量。可以利用與主天線極化方式正交的輔助天線接收信號,構(gòu)建第2路混疊信號,得到進入主、輔天線接收信號vm(t),va(t):
(5)
(6)
式中:hm為雷達主天線的極化矢量;ha為交叉極化輔助天線的極化矢量;er(t),ej(t)分別為在雷達接收天線端口處的目標(biāo)回波信號和干擾信號,可分別表示為
er(t)=SphmArs(t)
(7)
ej(t)=hjAjj(t)
(8)
式中,Sp為目標(biāo)的極化散射矩陣,hj為干擾機發(fā)射天線的極化矢量,Ar和Aj分別為雷達接收到的目標(biāo)回波以及干擾信號的幅度。根據(jù)雷達方程和干擾方程,有
(9)
(10)
式中,Pt為雷達發(fā)射信號的峰值功率,gm為雷達主天線增益,λ為雷達工作波長,σ為目標(biāo)RCS,R為目標(biāo)與雷達的距離。
考慮通道噪聲N,根據(jù)式(5)~(8),可以得到雷達主、輔接收通道信號的向量-矩陣表達式:
Y=AS+N
(11)
式中,
(12)
(13)
(14)
3 極化通道擴展盲分離算法
3.1 算法的數(shù)學(xué)模型
設(shè)目標(biāo)回波為sr(t),干擾j(t),則在雷達接收天線端口處,主天線和交叉極化輔助天線的接收信號可分別表示為
(15)
(16)

進入雷達主、輔接收通道的信號可以表示為
(17)
表示成矩陣形式,即為V=AS+n。
下面根據(jù)盲源分離的3個基本假設(shè)討論回波信號和干擾信號的可分離性:
1) 源信號間相互統(tǒng)計獨立。目標(biāo)回波和干擾是由兩個相互獨立的物理過程所產(chǎn)生,可以認為兩者是統(tǒng)計獨立的。
2) 混合矩陣列滿秩。干擾機為了避免極化失配通常將天線設(shè)計為斜極化或者圓極化,而目標(biāo)通常具有較為復(fù)雜的外形,其極化散射矩陣隨著視角的變化而變化,即在接收天線端口處,回波信號和干擾信號具有不同的極化狀態(tài),又由于輔助通道采用正交極化,因而混合矩陣A為列滿秩矩陣。
3) 至多含有一個高斯分布的源信號。目標(biāo)回波和復(fù)合拖引干擾中,至少目標(biāo)回波信號為非高斯分布信號。
假設(shè)一個P×P階矩陣M,則以M為特征矩陣,可構(gòu)造y的四階累積量矩陣:
(18)
式中,y為白化后的觀測向量,yi,yj,yk,yl分別為y的第i,j,k,l個元素,vij表示矩陣Vy(M)的第i行第j列元素,mlk表示矩陣M的第l行第k列元素。
結(jié)合獨立分量分析(ICA)及高斯噪聲高階累積量為零的性質(zhì),將式(18)變換為

UVs(M)UH
(19)
由白化矩陣的特點可知,U為酉矩陣。同時,由于源信號是相互獨立的,上式中四階累積量矩陣Vs(M)為對角矩陣,有
Vy(M)=UΛUH
(20)
構(gòu)造c-FastICA盲分離算法的代價函數(shù)模型為
J(w)=E{G(|wHY|2)}
(21)
式中,Y為白化后觀測信號,w∈CN為分離矩陣某一列,滿足約束條件w=1。
因此,c-FastICA的最優(yōu)化問題可以表示成如下形式:
(22)
基于牛頓法,可以推導(dǎo)出c-FastICA算法的不動點迭代公式為[6-8]
w(m+1)=-E{g(|z|2)(z)*Y}+
E{g′(|z|2)|z|2+g(|z|2)}w(m)
(23)
式中,z=w(m)HY,m為迭代次數(shù),g為G的一階導(dǎo)數(shù),g′為G的二階導(dǎo)數(shù)。
3.2 計算機仿真結(jié)果
仿真實驗參數(shù)如表1所示,選擇噪聲調(diào)頻和噪聲乘積干擾作為壓制式干擾,噪聲乘積干擾的調(diào)制噪聲為零均值、方差為1的高斯白噪聲。
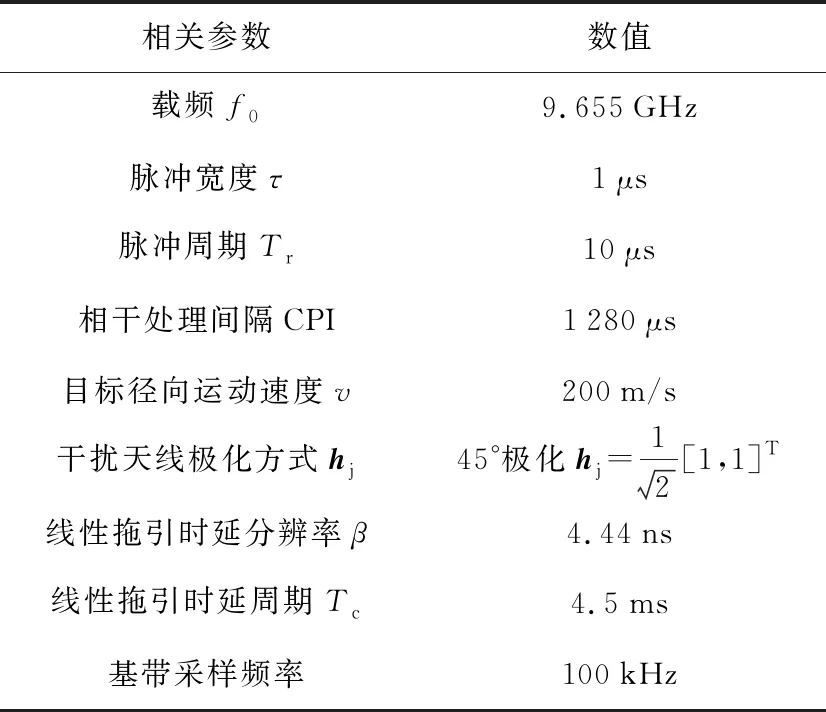
表1 仿真實驗設(shè)定參數(shù)
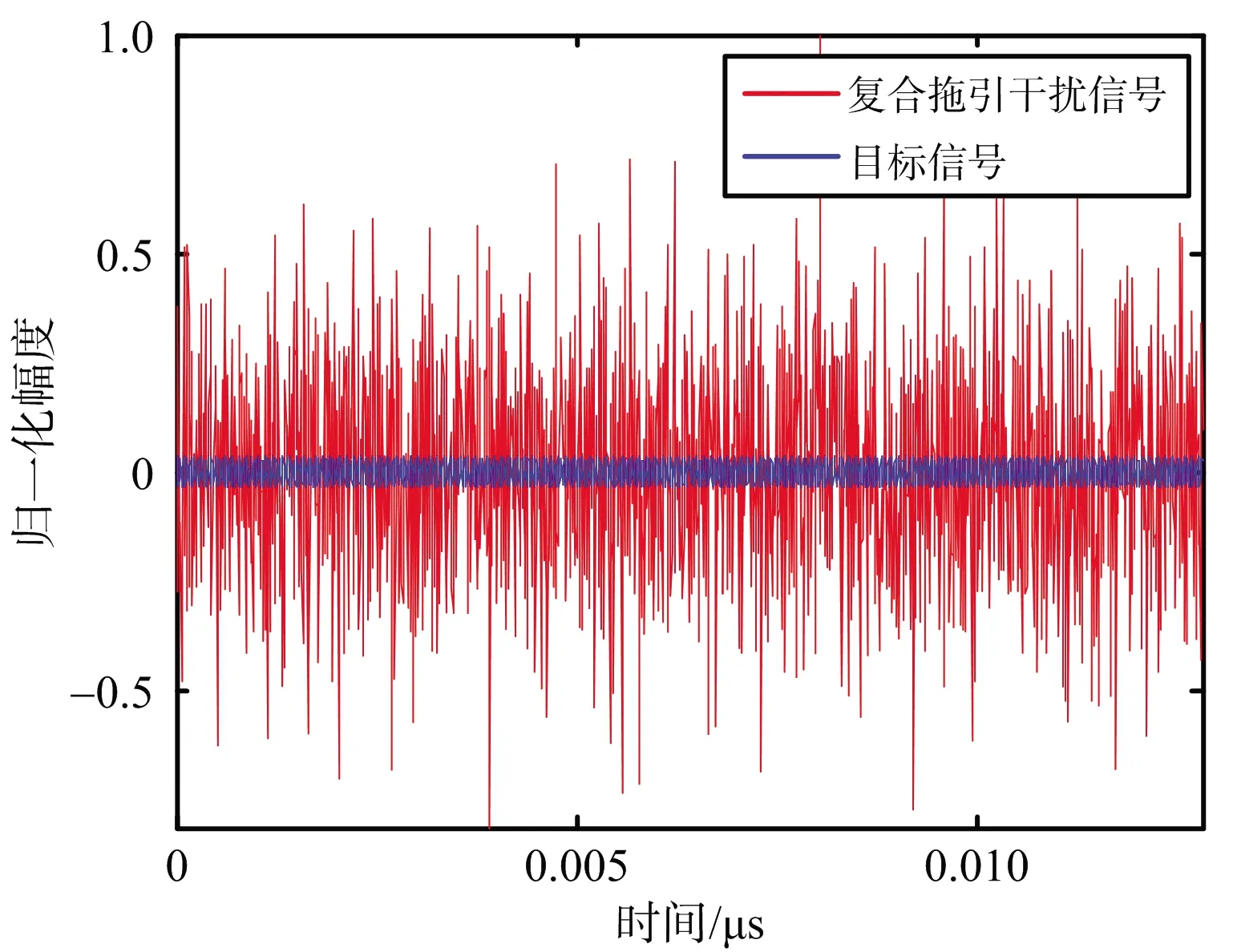
根據(jù)表中參數(shù)可以計算得到拖引率為α=β/Tc≈10-6,為了達到同步拖引效果,施加多普勒頻率應(yīng)為fdj=2αf0=19.31 kHz。假設(shè)目標(biāo)回波幅度為1,JSR=20 dB,SNR=10 dB,圖1~圖2仿真了雷達接收到目標(biāo)+復(fù)合拖引干擾的時域及頻域波形。
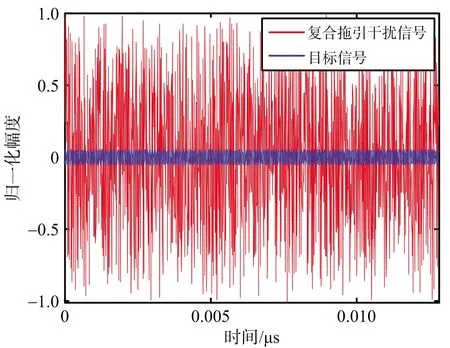
(a) 時域波形
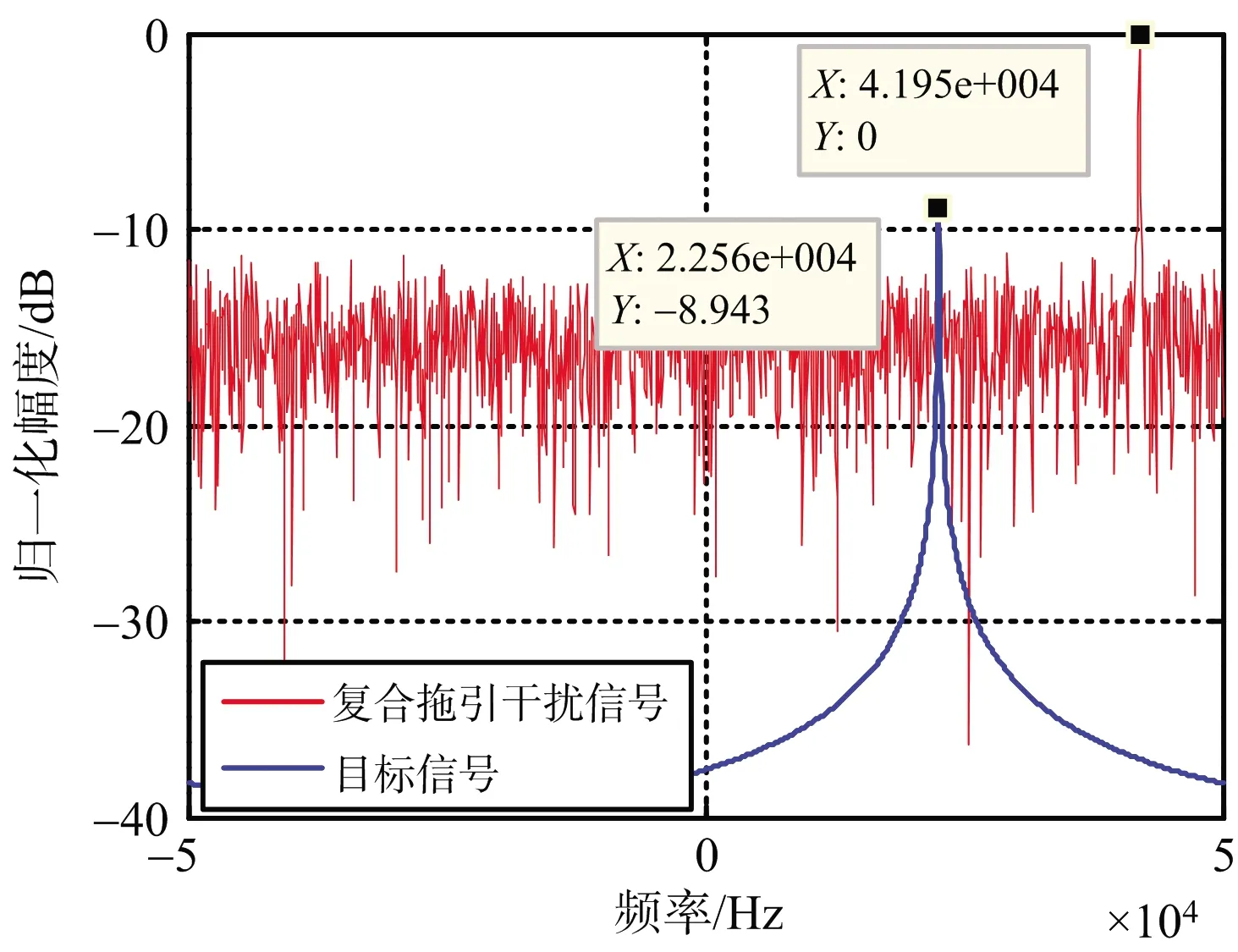
(b) 頻域波形
(a) 時域波形
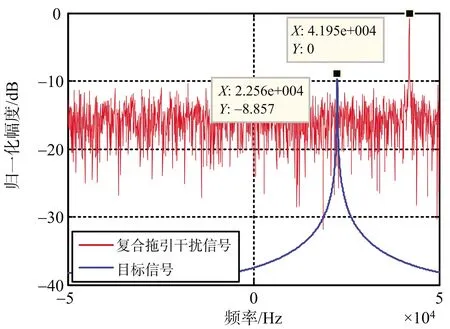
(b) 頻域波形
由圖1(b)和圖2(b)可以看出,真、假目標(biāo)的多普勒頻率相差約19.39 kHz,與理論值基本一致,誤差是計算機量化造成的。利用極化通道擴展和盲源分離算法,可以得到兩路分離的信號, 圖3~圖4分別仿真了兩路分離信號的幅頻分布。
由圖3~圖4可以看出,在兩種針對PD雷達的拖引復(fù)合干擾條件下,利用提出的極化通道擴展和盲源分離算法可以很好地將干擾與目標(biāo)回波分離開,進而能夠利用分離出來的兩路信號完成對目標(biāo)和干擾的同時跟蹤處理。
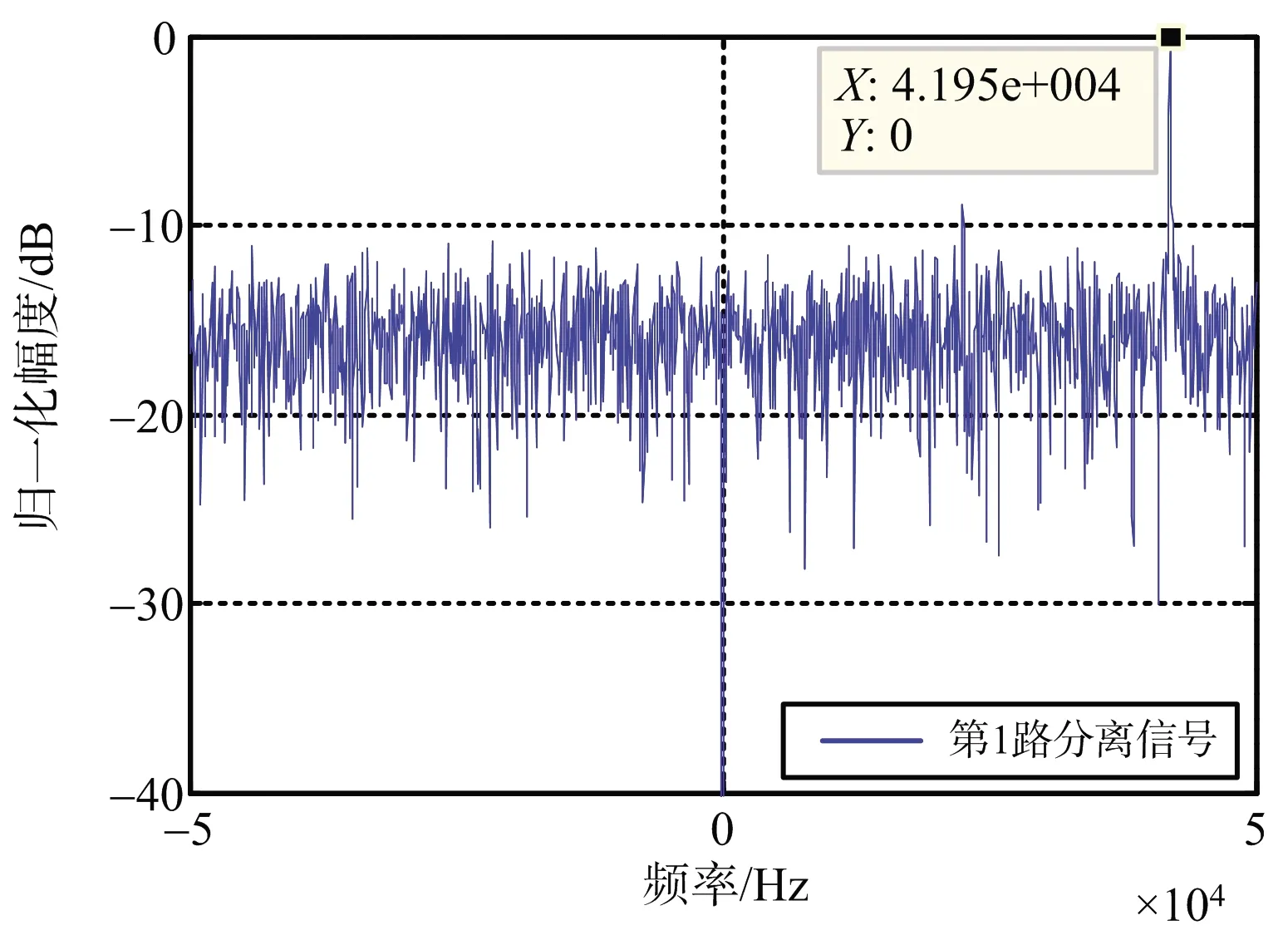
(a) 第1路分離信號
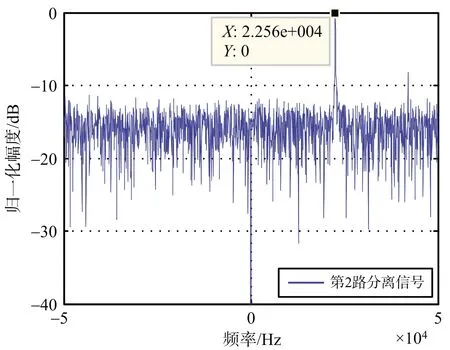
(b) 第2路分離信號
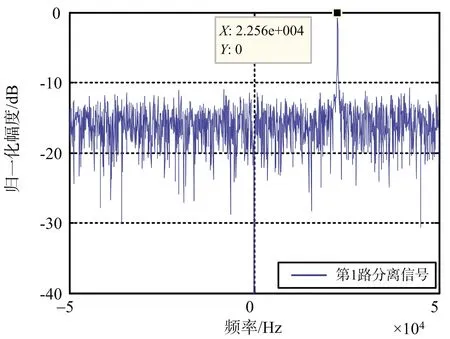
(a) 第1路分離信號
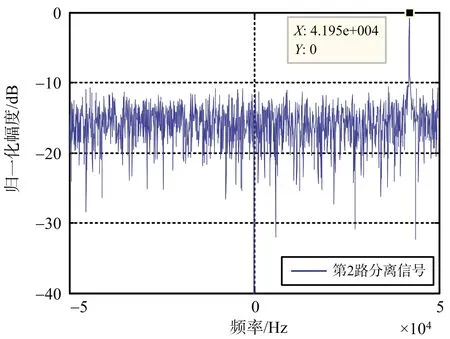
(b) 第2路分離信號
4 結(jié)束語
為了對抗現(xiàn)代干擾機釋放的復(fù)合拖引干擾,本文首先建立了復(fù)合拖引干擾的模型,并采用極化通道擴展的方法彌補了單通道處理時需做欠定盲源分離的缺陷,在此基礎(chǔ)上提出了一種基于極化通道擴展和BSS的干擾抑制方法,并針對“噪聲調(diào)頻+距離-速度拖引復(fù)合干擾”和“噪聲乘積+距離-速度拖引復(fù)合干擾”兩種情況進行了分析,理論推導(dǎo)和仿真結(jié)果表明,所提出的算法在兩種典型的復(fù)合拖引干擾情況下可以較好地分離目標(biāo)和干擾。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06