Smart3D在空三解算及模型生產方面的探討
2020-06-08 08:50:40李新寧權君娟
新疆有色金屬 2020年1期
李新寧 權君娟
(寶雞西北有色七一七總隊有限公司 寶雞 721015)
1 引言
傾斜攝影測量能夠實時快速獲取地面地物的位置、正側面紋理等諸多信息,通過GPS測量和后期軟件的處理,可以生產出真實紋理的高精度地物三維模型,為BIM、城市三維模型重建、測圖等提供了現實三維基礎,因此在規劃、國土、交通、電力等多個部門得到廣泛的應用。為了推動傾斜攝影測量技術的發展,不少軟硬件廠家都提出了自己的解決方案,如中海達的iFly D6 六旋翼無人機+iCam Q5 五鏡頭相機、南方測繪公司的天行HO1300 八旋翼無人機+T51五鏡頭相機、武漢點云科技有限公司的SkyPhoto全套內業處理軟件、Bentley 旗下的Smart3D 系列軟件。
本文主要探討傾斜攝影測量內業處理的前期工作,運用常用的專業軟件Smart3D對某一研究區域進行空三解算和模型生產,介紹其中的工作流程、生產效率、精度檢測等。
2 背景
為了試驗傾斜攝影測量技術在1:500 地形圖測繪的可行性,選取了建筑密度約30%、正射像片主點所覆蓋面積約0.2 平方公里的某一村莊進行試驗。外業航拍采用多旋翼無人機+五鏡頭相機;設計像片的地面分辨率為3厘米,航向重疊度和旁向重疊度均為75%。航拍和測量結束后統計:每個鏡頭的像片數是227張,共1135張,每張像片的像素約2千萬,外業布測了8個像控點。
空三解算和模型生產對計算機的要求很高,軟件的安裝和試驗工程數據均在固態硬盤上。試驗采用的計算機,其主要配置如下表:

Smart3D 是一款基于圖形運算單元(GPU)的快速三維場景運算軟件[1],具有處理精度高、紋理真實、自動化程度高、輸出格式多樣化等優點。Smart3D系列軟件包括Master(主控臺)、Setting(設置)、Engine(引擎)、Viewer(瀏覽)、Editor(修模)等。Bentley 公司將其收購后不斷更新版本,本文使用的版本是4.4.6.845中文版。
3 項目設置
(1)像片處理
外業像片是由一個正射鏡頭和四個傾斜鏡頭拍攝出來,不同鏡頭的相機參數會有所不同,因此按鏡頭將像片放置在五個不同的文件夾中,不同鏡頭的像片名稱其前綴盡量保持不同,可以采用ACDSee等軟件進行批量重命名。如果天氣忽明忽暗等原因引起像片色調差異偏大,則需采用易拼圖等專業軟件進行勻光勻色處理。
(2)創建工程及設置
打開主控臺Master,創建新工程,工程名稱不能為中文,確定好名稱和路徑后進入主界面。
“影像”節點下添加整個目錄,將五個鏡頭的像片添加到五個不同的影像組,正射照片所在的影像組建議排在第一位,方便初次刺入像控點。添加完成后軟件自動根據像片的EXIF 識別出每個影像組的相機信息。
4 刺像控點與空三解算
該實驗有8個像控點,均勻分布在測區范圍內的平坦位置上,每個像控點對應的正射和傾斜像片達幾十張,如果每個像控點人工從1135 張像片找出對應的幾十張并刺入相應位置,是極其耗時且容易出錯。因此該步驟主要方式為:初次刺入三四個像控點對應的正射照片位置,空三解算后預測出所有像控點所在像片的坐標,然后根據預測坐標將所有像控點刺入相應位置,最后再次空三解算[2]。
(1)初次刺點與空三
在主界面的“Surveys”節點下,點擊“編輯控制點”,軟件自動彈出“控制點編輯器”窗口,導入像控點坐標文件,并設定好空間參考系統,選擇容易判讀的三個像控點,在正射像片上刺入。檢查無誤后保存并退出控制點編輯器,返回主界面中提交空中三角測量,里面的“定位/地理參考”選項中選擇“使用控制點進行平差”,其余默認設置,開啟引擎Engine,計算機則自動運行空三解算。
測繪行業中像控點坐標常采用高斯投影坐標系或地方坐標系,Smart3D導入像控點后一定要選擇空間參考系統,如果是地方坐標系則要輸入橢球參數、中央子午線、橫坐標偏移量等。不能默認選擇笛卡爾坐標系,否則坐標離原點(0,0)越遠,模型失真程度越高,這現象與Smart3D的算法有關。
(2)二次刺點與空三
因為初次刺點出來的空三精度是較低的,所以需要刺上所有像控點涉及的正射和傾斜像片,這樣出來的空三精度才很高。打開控制點編輯器,查看初次刺點的三個像控點有無粗差,無粗差后在“顯示影像”選擇“可能是視點”,在控制點列表中點選某一像控點,則軟件將該點涉及正射和傾斜像片的位置全部預估出來并顯示在影像列表中,逐一選擇影像,以影像上點的清晰程度決定是否刺上該像控點。無誤后再次按默認設置提交空中三角測量。
Smart3D空中三角測量包括影像關鍵點提取、相對定向、絕對定向、像主點坐標計算等。空三效率方面,Smart3D 4.4版本比歷史版本提高了不少,該計算機配置下1135張像片的一次空三解算時間約為半小時。
5 三維模型的生產
傾斜攝影無論是測圖還是三維城市建模等,都是基于可視化三維立體模型上進行。Smart3D 在精確的空三解算后能夠輸出OBJ、OSGB、3MX等諸多格式的三維模型。
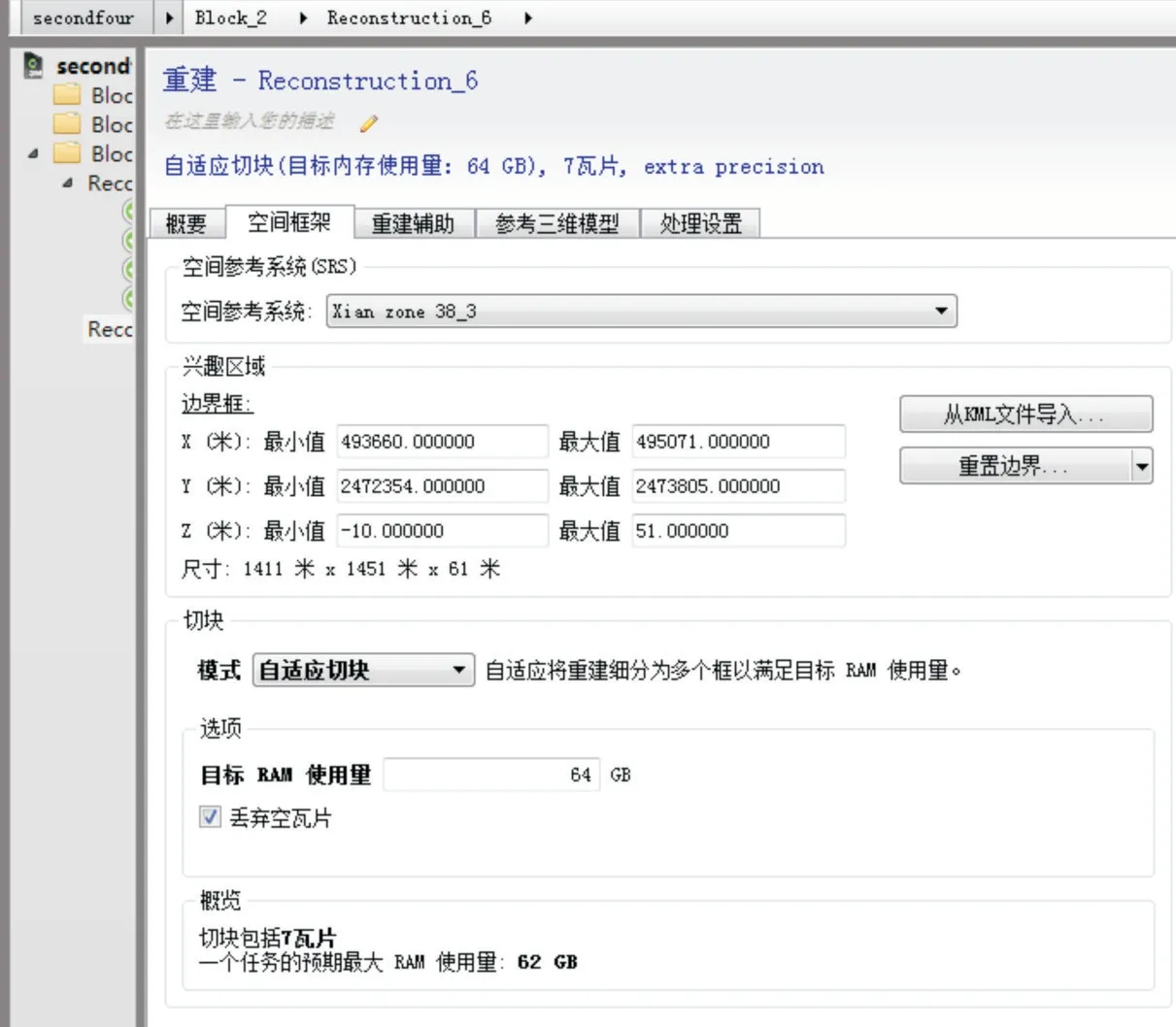
圖1 三維模型生成中的空間框架設置
主界面的概要節點中,點擊“新建重建項目”,因為數據量較大不能一次性生成一個整體三維模型,需切塊。在“重建”界面的空間框架節點中,空間參考系設為導入像控點時的坐標系,切塊模式為“自適應切塊”,目標RAM 使用量設置為計算機的內存“64 GB”,軟件根據設置自動劃分成幾個瓦片,如圖1 所示。然后轉移到“重建”界面的概要節點,點擊“提交新的生產項目”,目的選擇“三維網絡”、格式選擇所需的三維模型格式、空間參考系統選擇導入像控點時的坐標系,其余默認后提交給計算機。該步驟計算機自動運行,需開啟引擎Engine,是最耗時間的一步,實驗中選擇紋理壓縮為“JPEG質量70%”,生成的OSGB模型所需時間約為9小時。
如果還要生成其他格式的三維模型,需再次提交新的生產項目,所耗時間比初次三維模型生產的時間少很多,如實驗中后續提交的S3C 格式三維模型,生產時間約為1小時。S3C 格式三維模型可以直接在Viewer瀏覽器中查看效果。
因為該實驗是為1:500地形圖服務的,所以還需生成正射影像,提交新的生產項目后,目的選擇“正射影像/DSM”、采樣距離設置為0.05 米、正射影像的顏色源選擇“Optimized computation(visible colors)”、不勾選“DSM”。生產正射影像的時間約為1.5小時。
6 精度檢測
為了驗證模型的平面精度和高程精度,在現場采集了34 個球場分界線、水泥地塊分界線等明顯平面地物點坐標。然后把模型導入清華山維EPS軟件中測量,將現場坐標與軟件測量值對比算出:模型的平面中誤差為0.041米,高程中誤差為0.036米。
地形圖的平面精度檢測主要是通過房角點、圍墻拐點等明顯特征點的誤差計算得出,為此現場采集了28個該特征點。清華山維EPS傾斜三維測圖的作業方式是通過房屋邊線、圍墻邊線交匯出特征點,將現場特征點的平面坐標與EPS 測圖的坐標對比,算出地形圖的平面中誤差為0.056米。
7 結論
通過試驗和精度檢測得出:利用Smart3D進行空三解算和三維模型生產,可以為大比例尺測圖、三維城市重建等工作提供了厘米級精度、紋理真實的現實三維實景基礎。這在實踐生產中具有一定的指導意義,為傾斜攝影測量技術的發展起到了積極推動的作用。
但是Smart3D 出來的模型還有一些不足之處:(1)大面積水域如魚塘存在空洞現象[3];(2)茂密植被處難以匹配模型或難以看到地表;(3)對計算機配置要求很高且模型生產效率較低;(4)報告成果內容較為簡單,無像主點坐標、連接點坐標等信息。隨著技術的不斷進步,相信這些不足之處都會得到解決。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
小學科學(學生版)(2020年10期)2020-10-28 07:52:12
數學物理學報(2020年2期)2020-06-02 11:29:24
中國化肥信息(2020年7期)2020-03-19 01:54:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國軍轉民(2017年6期)2018-01-31 02:22:28
光學精密工程(2016年6期)2016-11-07 09:07:19