波浪滑翔機海上試驗研究
2020-06-12 04:05:08王海軍
數字海洋與水下攻防 2020年2期
王海軍
(中國船舶重工集團有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
波浪滑翔機(Wave Glider,簡稱 WG)是由美國Liquid Robotics 公司[1]于2009年成功研發的一種新型無人自主海洋監測裝備,它兼具傳統水面定點浮標可以觀測海平面上氣象要素,有動力AUV可以按照規劃航路進行機動觀測,以及無動力水下滑翔器大范圍探測的優點[2]。其創新性地將海洋中無窮無盡的波浪能轉化為自身前進的主驅動力而無須提供額外的助力,輔以太陽能充電系統作為傳感器、通信和控制系統的電能來源,續航能力達到前所未有的高度。波浪滑翔機具備自主航行控制、數據實時傳遞、使用靈活、可遙控等功能[3]。波浪滑翔機還具有續航時間長、易操作、高自治性和全天候實時觀測等優勢,能夠高效完成多項海洋環境檢測和信息收集任務。由于波浪滑翔機具有制造成本低、實時數據傳輸、續航能力強、自主可控等特點,近年來在國內外受到了極大的關注。國外波浪滑翔機技術已經相對成熟,美國Liquid Robotics公司的波浪滑翔機已實現產品化[4],并在海洋研究、氣象觀測、軍事等領域得到實際應用。國內波浪滑翔機經過近些年的發展雖與發達國家相比還有較大差距[5],但在國家863計劃及國家重點研發計劃的支持下也已取得長足的進步。中國船舶重工集團有限公司第七一〇研究所突破了波浪滑翔機平臺的一系列重大關鍵技術,目前已進入設計定型和示范應用階段,并完成了小批量生產。國內從事波浪滑翔機的科研單位[6]還有國家海洋技術中心、中國海洋大學和哈爾濱工程大學等科研院所。海上試驗是海洋裝備實現產品化[7],投入實際應用前最關鍵的階段[8]。2019年5月9日-8月15日,由天津大學、中國船舶重工集團有限公司第七一〇研究所、國家海洋技術中心、中國海洋大學等單位共同承擔的國家重點研發計劃“海洋滑翔機改造與協作觀測技術”課題在南海進行了自測模擬海試。本文介紹了此次海試的主要試驗對象、試驗海區、試驗過程及試驗數據分析,為“海鰩”波浪滑翔機產品設計定型和示范應用奠定基礎。
1 試驗對象
本次試驗對象之一為中國船舶重工集團有限公司第七一〇研究所研制的“海鰩”波浪滑翔機,編號為2號、3號、4號。該波浪滑翔機采用模塊化設計思路,水面艇采用開放式結構并由輕型復合材料和鈦合金制成,臍帶掛纜連接水下驅動單元和水面艇。在波浪能的作用下水下驅動單元輸出牽引力帶動水面艇向前航行,導航控制中心輸出指令,操控裝配在水下驅動單元上的舵機控制波浪滑翔機的航向。波浪滑翔機主要系統設備包括:平臺驅動系統、導航控制系統、能源與配電系統、水面通信定位系統、岸基控制中心等。“海鰩”波浪滑翔機外形如圖2所示,主尺度及主要參數見表1。

圖2 “海鰩”波浪滑翔機Fig. 2 “Sea Ray” wave glider

表l 波浪滑翔機主尺度及主要參數Table 1 Main dimensions and parameters of the wave glider
2 試驗海區
波浪滑翔機海上試驗海區位于南海中東部(116°E,19.33°N)附近海域,水深約為1 000~2 500 m,樣機布放期間風力不大于8 m/s,浪級不超過4級,海區內的流速小于1 kn,周圍10 km內目測無漁網或其它設施,符合試驗條件。
3 試驗步驟
1)各系統設備啟動,檢查平臺驅動系統、航行控制系統、能源與配電系統、水面通信定位系統、岸基控制中心等是否工作測試正常;
2) 檢查各個密封艙體的氣密性是否滿足要求;
3)根據海試大綱和航次任務書要求,通過岸基控制中心預置控制參數和航路參數,進入導航模式,監控全系統工作是否正常;
4)母船航行到達布放點后,通過專用吊布釋放裝置將波浪滑翔機布放下水;
5)岸基控制中心與滑翔機進行北斗衛星通信,周期性地接收波浪滑翔機發送的數據報文并存儲;
6)岸基控制中心對波浪滑翔機工作狀態進行判別,發送修改控制參數或航路參數調整波浪滑翔機試驗內容;
7)試驗結束后,發送停止航行指令,母船根據波浪滑翔機的實時位置,機動到波浪滑翔機附近,準備進行回收操作;
8)通過專用打撈工具,分別打撈波浪滑翔機的水面艇和水下驅動單元,完成系統回收;
9)切斷系統電源,按照使用規程對產品進行沖淡維護保養。試驗時,波浪滑翔機通過北斗衛星通信向岸基控制中心發送以下數據信息:GPS位置信息、工作狀態、電池電量、系統電壓、航路號、航路點號、航行速度、航向。通過試驗數據分析,可得到波浪滑翔機航行距離、航行時間、航行速度、位置保持精度等參數。
4 海試結果及分析
4.1 波浪滑翔機航行性能分析
4.1.1 航行速度
航行速度計算方法:1 h內波浪滑翔機航行距離除以3 600 s。航行距離依據記錄的GPS軌跡點,計算所有相鄰點間距離的累加和。試驗中取連續約30 km直線距離,測試4號波浪滑翔機航行速度,處理結果表明:12 h滑翔機平均航行速度大于1 kn,數據曲線如圖3所示。圖3(a)中紅色虛線為波浪滑翔機實際航行軌跡,黑色虛線為試驗規劃路徑。圖3(b)中紅色虛線為波浪滑翔機平均航行速度,藍色曲線為每10 min計算的波浪滑翔機的航行速度。

圖3 航行速度測試軌跡及結果Fig. 3 Sailing speed test trajectory and result
4.1.2 航行時間和里程
3號樣機2019年5月11日布放,受休漁期結束影響,于8月13日回收,在位連續航行時間94 d,其中定點位置保持觀測時間為47 d,航行總里程3 069.3 km。試驗過程中平臺受夏季海洋環境的影響,回收后表面附著較多海生物。該試驗樣機水面艇底部和水下驅動單元的翼板等部分表面進行了防污處理,通過試驗對比發現經過防污處理的表面附著海生物較少,相反未進行防污處理的部分,附著海生物較多。如圖4。
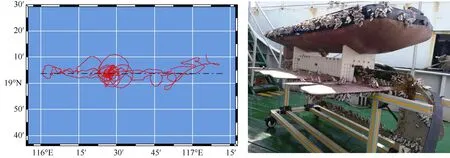
圖4 長航程試驗軌跡和試驗后樣機狀態Fig. 4 Long range test trajectory and product status after test
4.1.3 位置保持精度
2號、3號、4號樣機連續12 h位置保持半徑偏差分別小于40 m,70 m,140 m。其中2號和3號樣機的期望半徑為10 m,4號樣機的期望半徑為100 m。從圖5中可以看出2號樣機的均值區域處于40 m左右,有效地反映了波浪滑翔機的區域控位能力。

圖5 定點位置保持軌跡及偏差Fig. 5 Site-specific location holding trajectory and deviation
4.1.4 抗惡劣海況生存能力
波浪滑翔機經過了2019年4號臺風“木恩”、5號臺風“丹娜絲”、7號臺風“韋帕”及9號臺風“利奇馬”的考驗,其中“木恩”臺風經過時最大浪高達到6.6 m。臺風經過時海況及樣機工作情況如圖6所示。2019年4號臺風木恩(熱帶風暴級)于7月2日下午的南海熱帶低壓TD01,7月3日7時,中心風力18 m/s,中心氣壓992 hPa。
4.1.5 電池電壓數據分析
本次海試過程中波浪滑翔機的電池電壓變化如圖7所示,電壓均值在16.6 V左右,電壓為16.8 V時電池電壓基本處于滿電狀態,隨后電壓呈規律性變化,在16.4~16.85 V之間波動。隨著晝夜交替,太陽輻射強度周期性變化,系統用電有限,從而導致電池電壓周期性變化。綜合3套樣機的試驗情況表明:整個海上試驗期間,系統電壓變化較為平穩,具有一定的規律性。在臺風經過期間由于白天太陽光照強度的變化導致電池電壓出現了一定程度的下降。總過程系統電源電壓工作穩定可靠。

圖6 經受臺風考驗的海況及位置保持狀態Fig. 6 Typhoon-tested sea conditions and location maintenance

圖7 系統電池電壓變化情況Fig. 7 System battery voltage changes
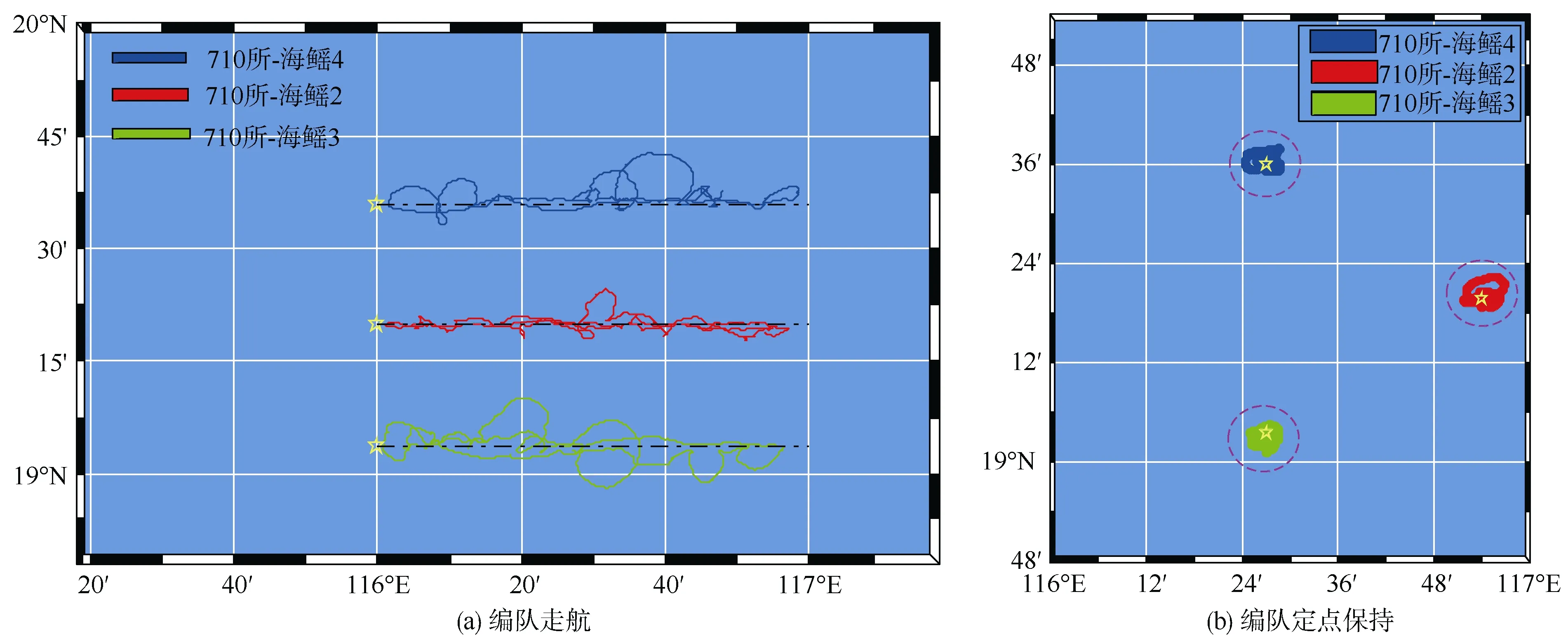
圖8 編隊協同航行及定點位置保持Fig. 8 Collaborative formation navigation and site-specific holding
4.1.6 北斗通信驗證情況
衛星實時通信是波浪滑翔機平臺的優勢,衛星通信的成功率是同行專家和用戶特別關心的問題。本次海試過程中,根據岸站接收數據情況分析,衛星通信成功率在98%以上。并且在臺風經過時,岸站能夠實時穩定可靠接收到水面艇發回的數據報文,控制指令收發正常,充分驗證波浪滑翔機在惡劣海況下實時通信的能力。
4.2 編隊協同航行性能分析
2號、3號、4號樣機分別開展了15 d的編隊協同走航試驗和15 d的編隊定點位置保持試驗,運行軌跡如圖8所示。圖8(a)中“★”表示走航起始點,黑色虛線為規劃航路,左右距離100 km,兩條航線之間的距離30 km,樣機在航線左右往返航行。圖8(b)中“★”表示定點中心位置,3個定點保持的位置距離約為60 km。3臺樣機在各自的位置定點保持15 d。
在海上試驗中“海鰩”波浪滑翔機與國內相關單位研制的波浪滑翔機開展了性能比測,走航對比測試結果如圖9所示。圖中黑色虛線為規劃航路,綠色線為“海鰩”波浪滑翔機實航軌跡,紅色線和藍色線為其它單位研制產品的軌跡。對比測試結果表明:“海鰩”波浪滑翔機的航行控位性能較好。
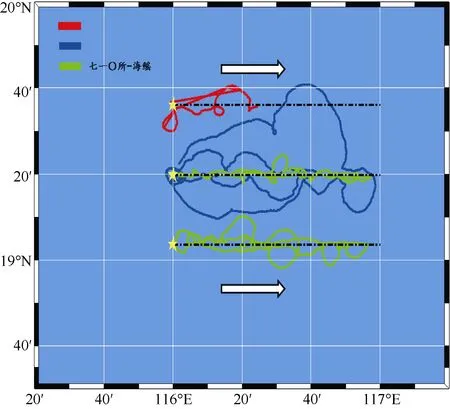
圖9 3家研制單位波浪滑翔機性能比測情況Fig. 9 Performance comparison of wave gliders from three research institutes
5 結束語
本次海上試驗波浪滑翔機最大航程達到3 069.3 km,連續航行時間94 d,經歷多次臺風考驗,3級海況下航行速度大于1 kn,12 h連續位置保持精度小于150 m。考核了波浪滑翔機編隊協同航行和編隊位置保持的能力;驗證了波浪滑翔機在6級以上高海況的航行能力和生存能力,試驗數據表明:波浪滑翔機在6級以上海況下能夠生存且工作穩定。試驗過程中,對波浪滑翔機能源補充和北斗衛星通信情況測試,表明波浪滑翔機的能源相對充足,在各種海況條件下北斗衛星通信穩定可靠。本次海上試驗對波浪滑翔機樣機系統和設備的功能進行測試,檢驗波浪滑翔機在復雜海洋環境下的作業功能和綜合性能;為波浪滑翔機設計定型及海上應用示范奠定了基礎。