自航式潛艇艦橋的設計構想及運用
2020-06-12 04:05:28張博文王晟洵
數字海洋與水下攻防 2020年2期
張博文,王晟洵,李 輝
(中國人民解放軍海軍潛艇學院,山東 青島 266000)
0 引言
縱觀潛艇發展歷程,增強潛艇隱蔽性的同時提高水下觀通能力已成為潛艇的未來發展趨勢。但在實際應用過程中,這兩者往往具有難以調和的內在矛盾。潛艇在潛望深度航行時可將艦橋中的設備伸出水面實現觀察與通信,然而在此深度下的潛艇極易被敵方探潛手段發現;潛艇在工作深度航行時能有效躲避敵方反潛平臺探測和攻擊,但此時潛艇幾乎完全失去了對外觀察與通信能力,變為一個“絕對黑體”,不利于有效發揮作戰性能。前蘇聯海軍潛艇技術在發展了半個多世紀后,潛艇下潛深度達到駭人聽聞的720 m(阿爾法級),但這也僅僅是通過單純的增加深度來增強隱蔽性,依舊未能解決水下觀通與隱蔽性之間的矛盾。美軍大力發展的水聲通信能夠完美地解決這對矛盾,卻因水下復雜的聲場環境而進展緩慢。針對上述問題,我們提出了一種既能保證潛艇在大深度下隱蔽航行,又同時具有完整對外觀察與通信能力的新型設計構想,即自航式潛艇艦橋。
1 設計構想
1.1 設計理念
艦橋(指揮室圍殼)作為潛艇的一部分,主要功能是安裝升降裝置(潛望鏡、雷達等設備),用以潛艇潛望深度時的觀察通信,本質上是一個固定在艇身上的任務載荷裝載艙。而潛艇“上浮—觀測與通信—下潛”這一過程本質上是將潛艇這樣一個龐然大物作為該裝載艙的動力來源使之完成機動,性價比過于低下。自航式潛艇艦橋的設計理念便是將艦橋這個裝載艙加裝獨立的動力和指控系統,使之成為一個大型線控無人潛航器,通過其上浮和下潛來取代潛艇整艇的上浮和下潛,高性價比地完成潛艇作戰航行所需的觀通任務。
自航式潛艇艦橋是一種代替現有潛艇艦橋的多功能線控無人潛航器。通過穿過潛艇殼體的線纜受潛艇控制,融合了傳統潛艇艦橋和傳統無人潛航器的功能,可在潛艇大深度隱蔽航行的狀態下自主航行至潛望深度,完成觀察、通信、定位、搜索、偵查、誘騙等任務。并能即時地匯報情況、接收指令,與友軍協同行動,為潛艇提供全方位的信息保障,極大地提高了潛艇的主動攻防能力。
該艦橋安裝將不會對原艇體耐壓和非耐壓結構造成次生影響,僅需一根集成線纜穿過耐壓殼體與艇內相關電子設備連接。該線纜有如下2點作用。
1)將艦橋導航控制系統與母艇相連,操作人員在母艇內通過手動或指控系統來控制艦橋航行和作業。
2)將艦橋功能陣列中光電桅桿、衛星通信天線、短波通信天線等設備接收和需發送的數據進行統一處理,可與母艇內指揮系統實現信息交互。
自航式潛艇艦橋采用操作員手動操控艦橋分離與對接的方法。位于潛艇內部的操作員通過外部攝像頭手動操控調整艦橋姿態,折疊于艦橋艙壁外的圍殼舵展開,舵效向上,主推進器啟動,噴口向下,艦橋脫離潛艇開始自航。母艇和艦橋相連的線纜在兩端同時放線,使得線纜在水中不受張力影響。該艦橋效果圖如圖1所示,三視圖如圖2所示。

圖1 自航式潛艇艦橋總體示意圖Fig. 1 General diagram of SPSB

圖2 自航式潛艇艦橋三視圖Fig. 2 Three-view of SPSB
1.2 結構布局
自航式潛艇艦橋總體呈類鵝卵石狀設計,使用模塊化艙體設計理念,并可發揮傳統潛艇艦橋的大部分功能。內部包括升降舷梯以及副艦橋(瞭望平臺),在艙體內外可安裝航行所需的羅經、方向舵輪、汽笛、信號燈等。艦橋內部結構主要分為5部分,如圖3、圖4所示。
1.2.1 指令導航艙
內置艦橋保障監測系統、導航控制系統、水聲探測系統、放線裝置。該艙功能為實現艦橋基本的航行控制,其中導航控制系統單元通過放線裝置連接數據線纜以維持艦橋與潛艇的穩定通信和數據傳輸。
1.2.2 機械設備艙
該艙分為2部分,裝有艦橋主要的電子設備和機械器件,如水平舵控制系統、鋰電池以及1臺主推進器、1臺側推進器。除浮力艙外,艦橋在水下為通透設計,全艙為濕艙。根據參考資料得知在動橫傾角為57.3°時受到的傾斜力矩最大[1],因此設定每當動橫傾角超過50°時,開啟側推裝置,以維持艦橋的穩定。
1.2.3 功能陣列艙
該艙裝有雷達桅桿、光電桅桿、偵察天線(即電子支援桅桿)及綜合通信天線(該天線集成了高頻、甚高頻通信天線和衛星通信天線)。該陣列艙底部設置一部集成計算機,收集處理以上功能陣列的通信數據,并與指令導航艙的通信線纜相連接,將數據傳輸至潛艇內部。
1.2.4 浮力調整艙
左右兩邊對稱分布,通過小型高壓氣瓶和進排水系統實現艦橋的浮力調整,與艇對接后,通過母艇高壓氣系統向艦橋內氣瓶供氣。為了滿足復雜的任務需求,艦橋中有多個備用氣瓶保證其在緊急情況下的脫離和機動。
1.2.5 綜合載荷艙
該艙可根據任務需求裝備相應傳感器、水聲對抗設備、武器系統等。
在此處僅以水聲對抗設備作為標準任務載荷。由于該艦橋最初的設計目的就是代替潛艇進行通信,確保潛艇本身隱蔽及安全。故若艦橋在任務區域通信被偵測或暴露時,可展開載荷艙中的拖曳陣列模擬潛艇整艇航行,同時潛艇斷開與其相連的通信線纜,在艦橋的掩護下隱蔽逃逸。

圖3 自航式潛艇艦橋功能模塊圖Fig. 3 Functional module diagram of SPSB
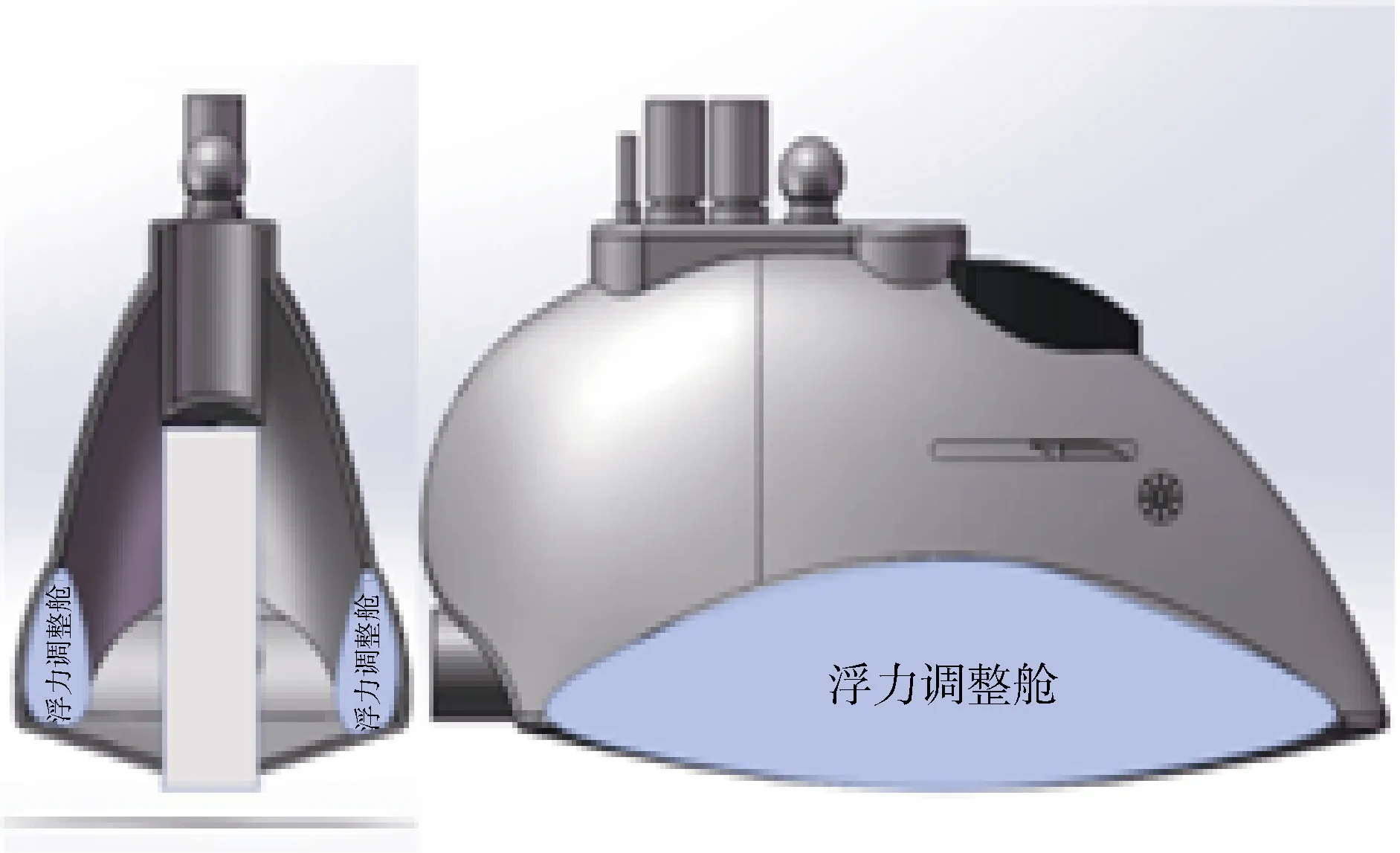
圖4 自航式潛艇艦橋浮力模塊圖Fig. 4 Buoyancy module diagram of SPSB
2 運用研究
2.1 同步觀通
使用時,艦橋脫離潛艇進行自主航行,潛艇通過線纜與艦橋進行雙向數據傳輸并進行航行控制,艦橋機動至水下5~10 m,艦橋保持懸停,根據任務需求使折疊于艦橋內的功能陣列展開并露出水面,通過天線接收水面艦艇、作戰飛機及其他作戰平臺發出的短波信號;通過收發衛星信號來實施隱蔽的雙向通信以及對導航設備的校正,且在必要時可通過衛星天線與艦艇或基地進行衛星通信;通過光電桅桿和雷達進行對空搜索和掃海警戒。為保證潛艇隱蔽性,艦橋可在作業時保持靜止以達到水面零航跡的效果,此時放線裝置可繼續放線,潛艇航行不受影響。在快速完成探測和通信后,艦橋圍殼舵折疊收納,同時收納功能陣列,艦橋離開潛望深度返回母艇。此時舵效向下,主推進器噴口向上,同時線纜開始回收,艦橋通過手動或指控系統與母艇完成對接,并使用卡簧鎖住。亦或根據需求繼續保持淺深度待命。使用該艦橋進行同步觀通的優勢具體可以概括為以下幾點。
1)艦橋體積小,相對于潛艇來說具有較高的目視隱蔽性和反射隱蔽性,裝備該艦橋后潛艇不被敵反潛兵力發現的概率將提高數倍;
2)裝備該艦橋后潛艇的機動攻擊最大海域面積將提高數十倍;
3)潛艇可在大深度隱蔽機動至攻擊陣位,隨時接受友軍指令;
4)潛艇可在大深度下進行天文導航、制導計算;
5)潛艇上浮前可提前觀測海空狀況,保證安全。尤其是在應用于常規潛艇時,能夠在其浮起充電前偵測上方情況,極大地加大了常規潛艇的生存率。
2.2 隱蔽偵察
自航式潛艇艦橋在特定需求下可等同于一款傳統大型線控無人潛航器,所使用的控制線纜原型為線導魚雷導線,現有技術下的線導魚雷導線長度可達到14 000 m,直徑0.25 mm,抗斷力98 N[2]。遠大于當今所有潛艇的最大潛深,因此在該類導線的牽引和指控下,自航式潛艇艦橋具有極大的有效作業范圍,完全可滿足自航式潛艇艦橋在遠離母艇數十千米的距離上偵測海洋環境(如有效避碰和預防水下斷崖);或于潛艇對岸打擊時獨自進入危險的淺水區域偵查,而在此期間,母艇可以選擇合適的隱蔽陣地坐底或懸浮,即使艦橋作業時被偵測,也能最低限度地暴露母艇的準確位置。使得潛艇在不暴露位置和行蹤的前提下獲取更多利于執行任務的信息,既提升了潛艇本身的作戰效能,也保證了潛艇的航行安全。此外,艦橋可與所在海域內其他預設UUV進行協同導航,艦橋放出水聲信號,預設UUV上的雙水聽器通過測量水聲信號相位差并結合距離信息來確定自己的位置[3]。
2.3 誘騙掩護
當潛艇占領射擊陣位后,時常會遇到魚攻角不利的情況(敵艦艦艏朝向我艇魚雷發射線),此時不能立即進行魚雷射擊,需要重新進行調整,一旦調整便會導致態勢的改變,這相當于要重新占位[4],效率較低,因此,可使用自航式潛艇艦橋對敵艦進行誘騙。艦橋通過升起光電桅桿高速航行以制造誘騙航跡,通過功能載荷倉模擬整艇聲場,使敵艦誤判我艇位置,做出錯誤的規避機動,將其引誘至正橫朝向我艇魚雷射線的航向,大大地提高了直進射擊攻擊效率。
當潛艇處在遭到敵對反潛體系聯合圍剿等緊急情況下,潛艇內人員可控制艦橋松開卡簧,切斷線纜,使艦橋脫離母艇自主航行。此時艦橋和母艇可選擇的戰術機動如下。
1)通過指控系統,艦橋釋放出綜合載荷倉中的拖曳線陣列,模擬潛艇整艇進行航行。此時母艇全艇靜默,通過艦橋模擬整艇運動來迷惑敵反潛體系,幫助母艇盡快脫離危險海區。
2)艦橋與母艇反向機動,與母艇間達到一定距離后(使敵反潛體系無法通過艦橋推測出潛艇位置),向基地進行延遲發報,報告潛艇處境。
需要說明的是,當根據威脅程度和任務需求拋棄自航式艦橋時,不會對潛艇母體流線型、整體流體阻力和機動性能有大的影響,潛艇水下航行幾乎不會受到影響,基本的慣性導航設備和水聲探測設備將確保潛艇能安全返回母港。
艦橋脫離前后狀態如圖5、圖6所示。

圖5 脫離前狀態Fig. 5 Pre-detached status

圖6 脫離后狀態Fig. 6 Post-detached status
3 關健問題
3.1 尺寸問題
據當前傳統潛艇艦橋尺寸來看,該設計的體積將接近160 m3,較大的體積會對無人潛航器的航行、作業造成一定的影響。但若想擁有全面的功能,較大的體積是無法避免的。今后的工作方向將會是在大體積和多功能這對矛盾中尋找最優解,使得在保證功能的情況下,做到無人潛航器體積小型化。
3.2 水下隨動對接與分離控制
在艦橋與潛艇的脫離與對接過程中,當前使用的是操作員通過外部攝像頭手動操作的方法。但此方法在應用上仍有較大的困難,當艦橋和潛艇受到水下流等外部因素的干擾時,對接時的穩定性將會受到影響。今后的發展趨勢將會是使用多種傳感器輔助的更為穩定、準確、迅速的手動或自動對接。美軍在潛艇上設置船塢或儲存槽,采用驅動機構,固定、布放和回收水下無人潛航器的塢載方式很值得借鑒[5]。
3.3 水密問題
自航式潛艇艦橋的安裝會導致潛艇耐壓殼體上有巨大的切割開口,對這種尺寸的開口進行水密處理幾乎是不可能完成的任務。因此,未分離時,艦橋與母艇相互隔絕,僅有一個升降舷梯口和線纜口穿過非耐壓殼體與耐壓殼體相連,供人員出入艦橋。
3.4 對接設備的強度
潛艇航行以及水下湍流的流體阻力,會使對接設備受到較大的應力,若對接設備無法承受這種應力,就會有航行時自航式潛艇艦橋從艇體脫落的危險。以現有材料強度來看,滿足這種需求難度較大。由于連續開孔和環形肋骨之間的互相影響基本上與單開孔的相一致[6],因此增加固定結構數量能一定程度上解決此問題。
3.5 操縱性分析
大型潛航器的操縱性依然是一個世界性難題。由參考資料知,影響潛航器操縱性的因素很多,但主要因素是外形、質量分布和縱面布局。由于設計原因,對外形與質量分布進行改變難度較大;縱面布局方面則要求重心的縱向位置要盡可能向浮心靠近,以保持直航時的平衡系數。同時要求重心具有側移量,若其值選擇得當,則產生的橫滾力矩將平衡掉推進器的失衡力矩。此外,可借鑒美軍MK48魚雷的設計,設置相互獨立的十字型鰭和X型舵[7],可大大地改善潛航器的操縱性。
3.6 收放線技術
收放線技術可借鑒線導魚雷收放線技術,相關專著對于各種技術細節已有詳盡介紹[8]。在這里需要指出的是,由于線導魚雷導線張力較小,因此對接時需要艦橋與母艇高度協同。艦橋靠近潛艇,開始收線,當線上張力達到一定值時,停止收線,艦橋繼續靠近潛艇,靠近到一定程度后繼續收線,不斷重復此過程。始終保持線纜長度大于母艇與艦橋間的距離以使導線上張力很小,直至對接完成。
4 結束語
隨著海洋裝備技術的發展,無人潛航器的機動能力將愈發靈活,載荷將愈發多樣,功能將愈發全面,因此最后完全取代傳統潛艇艦橋是一種可能的趨勢。在進行近海作戰時,我方核潛艇能夠在信息保障的協助下隱蔽穿越海峽、水道,并對敵方的海上交通線進行威懾。常規潛艇則可更隱蔽高效地對重要峽灣水道進行封鎖。在遠海執行任務時,能夠改善潛艇遠海的定位精度,并能一定程度上使潛艇融入通信網絡體系,大大提高潛艇的任務效能。