基于機器視覺的機器人工件定位系統研究及實際應用
2020-06-15 01:58:38郭軍
科學技術創新 2020年14期
郭軍
(山東電子職業技術學院,山東 濟南250200)
1 視覺定位系統概述
在工業機器人領域,以往的機器人無法以自動化的方式完成工作,操作對象的開始與終止位置有著非常嚴格的要求,機器人只能完成特定的操作。無法針對外部參數的變化情況開閘針對性的操作,為了使機器人具有柔性特征,完成自動化生產,保證機器人可以快速開展工作,保證生產安全,可以將視覺技術應用于工業領域,對目標物體進行快速的識別,并明確具體位置。
目前,視覺領域研究在美國和日本等國家已經進行了多年的研究,已經獲得了相關研究成果,為后續學者進行相關研究提供了重要的參考。視覺傳感器可以實時跟蹤圖像,并對圖像進行針對性的處理。本文所研究的機器人視覺系統可以充分運用視覺技術,為工業機器人進行工件操作提供技術方面的支持。首先,所有采集到的圖像都需要進行轉化,使其成為數字圖像的形式,并進行預處理,從中提取可以利用的圖像信息,摒棄無關的信息,為提取圖像中的有價值信息提供便利;其次,再次處理圖像,經過一系列的變化和運算,對目標工件的位置進行獲取;最后,向機器人控制系統實時傳輸有價值的信息,使其可以順利完成后續操作。
2 視覺定位系統的組成
如圖1 所示為機器人視覺定位系統,在該系統中可以通過攝像機對工件進行仔細的觀察,充分展現完整的工件。在該系統中絕對不能缺少攝像機系統和控制系統的存在。攝像機系統:由攝像機和計算機共同組成,可以對視覺圖像進行全方位的采集,并結合視覺圖像進行針對性的計算。控制系統:以計算機為主,與控制箱進行緊密的連接,對機器人的位置進行合理的控制。所有工作區均需要進行攝像,計算機對圖像進行針對性的識別,并結合跟蹤特征提取有價值的信息對數據進行全面的整合,分別進行計算,這很對于機器人各環節位置的誤差值可以運用逆運動學原理進行解析,最后調整機器人位置和姿勢。

圖1 噴涂機器人視覺定位系統組成
3 視覺定位系統工作原理
3.1 視覺定位系統的工作原理。使用專門的攝像機進行攝像,并應用最為先進的采集卡,在計算機中統一輸入視頻信號,并在短時間內迅速完成處理,首先,需要對跟蹤號物體的局部圖像進行觀察,并準確提取,再建立坐標系。當學習完成后,圖像卡依然可以對圖像進行持續性的采集,對跟蹤特征進行針對性的提取,在提取完成后對數據進行精準的識別,并準確進行計算,機器人各環節位置給定值可以通過逆運動學進行解析,最后對末端執行機構的精度進行合理的控制,對機器人的位置和姿勢進行針對性的調整。
圖像獲取就是在計算機中統一錄入采集到的數字圖像數據,CCD是目前作為先進的圖像傳感器,已經在機器視覺中進行廣泛的運用,分辨率較高,可以在第一時間快速響應,不過其在制造工藝較為繁瑣,需要花費大量的制造資金。線陣CCD 相比與其他機構的CCD 結構更加簡單,只需要投入較少的資金即可,可以對信號進行實時的傳輸,并自動進行掃描,頻率響應高,以動態化的方式進行測量,并可以在低照度環境下開展工作,優勢十分明顯。因此,在對圖像進行采集時也可以使用CCD 工業相機,將其與攝像機圖像采集進行緊密融合,充分發揮兩種不同采集方式的作用,并通過計算機對所有采集到的數字圖像數據進行規范性的處理。工作流程具體如圖2 視覺定位系統軟件流程圖所示。
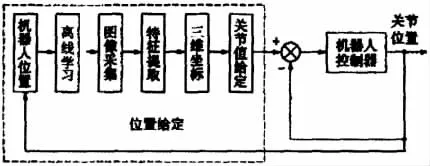
圖2 視覺定位系統軟件流程圖
3.2 基于區域的匹配。本文以區域相關匹配方法為主。選取圖像中的某一個點的灰色領域作為模板,在其他圖像中針對對應點區域進行全面的搜索,從而使兩幅圖像可以緊密融合,提高匹配度。在基于區域相關的算法中,固定尺寸的圖像窗口是匹配的主要特征。相似準則則是兩幅不同圖像中窗口間的相關性度量。如果經過搜索后可以找到最為相似的元素,則可以明確其是最佳的匹配對象。
3.3 圖像的特征提取。工作臺上的工件與工作臺背景顏色存在極大的差別,黑色是工件的主要顏色,可以將這一特征作為工件識別的主要依據。
工件邊緣處灰度并不是保持不變的,其會出現不同程度的變化,為判斷工件邊界點提供準確的依據,使其進行全方位的掃描。最后,以最小二乘法為基礎確定邊界點,并對其進行擬合,使其成為圓周,對圓心位置進行準確的計算。
3.4 實驗與分析。實驗的主要目的就是發揮機器視覺的作用,對工件的特征進行快速的識別。
在進行識別時需要結合原始圖像對跟蹤工件的局部圖像進行選取,使其成為模板圖像。
以局部圖像作為模板,在原始圖像中進行快速的區域匹配,并確定好原點,圍繞原點建立穩定的坐標系。然后確定明確的搜索范圍,結合提取的特征對區域形狀進行針對性的提取,而環形區域最為符合。對全部目標特征進行搜索,并準確提取工件的特征。
該步驟與離線學習過程相似。每次使用非常方便,不需要進行反復的學習,一般一次為最合適的學習頻率。通過離線學習,系統可以準確獲取工件的相對位置,避免工件在識別過程中發生位置變化,保持工件的穩定性,ROI 可以準確確定最佳的位置。
隨著離線學習時間的不斷延長,視覺系統進行匹配后可以完成相關操作步驟,準確確定需要識別的特征。
3.5 結果分析。經過離線學習后,需要對形狀特征進行提取。明確具體的特征后經過離線學習建立坐標系,對工件進行實時的跟蹤,以獲取完成的形狀信息。只有保證離線學習的合理性,才能在第一時間確定目標特征,并獲取全部的信息。
在使用圖像采集卡進行圖像采集時,需要對采集速度進行針對性的調整,保證每幅圖都可以保持相同的采集速度。攝像頭采集一幅圖像大概需要20ms。對程序進行合理的優化,使圖像采集和處理可以在同一時間進行,并且圖像處理速度需要快于圖像采集,以保證圖像的真實性和穩定性,避免圖像在處理過程中發生抖動。當物體運動速度低于極限速度時,可以對圓心的位置進行明確。
4 空間坐標的獲取
通過觀察圖像可以獲取完整的二維信息,程序中所有使用的坐標均以像素為單位,機器人在空間運動過程中對圖像進行科學的處理,使其可以轉換成三維空間坐標,在對其進行計算時需要遵循相關步驟。
機器人定位基準需要以工件圓孔的圓心為主,圓心世界坐標為A(X,Y,Z)。當圓心與視覺圖像緊密融合時,就可以確定機器人的位置。
標定攝像機,準確獲得投影矩陣。簡單來說就是圖像中的兩個像素之間的距離與世界坐標系可以相互轉換。
攝像機對圖像進行全方位的拍攝,并根據拍攝的信息明確圖像中圓心的坐標,計算與圖像中心的總體偏移值。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
河南科技(2014年23期)2014-02-27 14:19:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32