2019 年國外導航技術發展綜述
2020-06-16 11:38:04薛連莉沈玉芃宋麗君陳效真
導航與控制 2020年2期
關鍵詞:系統
薛連莉,沈玉芃,宋麗君,陳效真
(1.北京海鷹科技情報研究所, 北京 100074;2.西安建筑科技大學信息與控制工程學院, 西安710055;3.北京航天控制儀器研究所, 北京100039)
0 引言
2019年8月,美國國防部(U.S.Department of Defense,US DoD)公開了其2018年11月的《國防部定位、導航和授時(Positioning Navigation and Timing,PNT)整體戰略》報告[1],其目標是利用現代化全球定位系統(Global Positioning System,GPS)基礎功能及多種附加PNT信息源,以模塊化開放系統集成方法為美軍聯合部隊提供精確、可靠和彈性的PNT能力,維持并強化美軍及其盟軍在所有作戰領域的軍用PNT優勢。報告表明,美國已開始全面提升其軍用PNT技術能力,繼續增強GPS抗干擾能力,開發多源PNT服務能力。作為世界前沿技術發展的標桿,以美國為首,歐盟、俄羅斯、印度、日本等國家和地區2019年紛紛效仿,不斷推動衛星導航、慣性導航、視覺導航、量子導航、定位與授時等技術發展,并取得一定成果。
1 衛星導航
衛星導航技術是指采用導航衛星對地面、海洋、空中和空間用戶進行導航定位的技術。作為PNT的增援力量,已經建造或正在建造的全球導航衛星系統(Global Navigation Satellite System,GNSS)有美國的GPS、俄羅斯的GLONASS、歐盟的Galileo、中國的BeiDou等全球性系統,以及日本的QZSS和印度的NavIC等區域性系統。
(1)美國繼續擴大GPS II的應用范圍,全面推進GPS III導航衛星研究與部署
2019年7月,美國國家航空航天局(National Aeronautics and Space Administration,NASA)表示將在“Artemis”登月計劃中采用GPS為獵戶座飛船的宇航員和地面操控員、月球空間站Gateway以及月球表面任務提供導航解決方案。相關研究團隊正在開發一種可以獲取GPS位置信息的特殊接收機NavCube,該接收機將MMS Navigator GPS和SpaceCube(一種可重構的空間飛行高速數據處理系統)融合在一起。NASA團隊已對月球GPS接收機的性能進行了仿真并獲得了滿意結果,并在2019年年底完成了月球NavCube的硬件原型。
2019年6月,美國Harris公司宣布已向美國Lockheed Martin公司交付了第6個任務數據單元(Mission Data Unit,MDU)有效載荷,用于美國空軍下一代GPS III導航衛星。MDU有效載荷是第11顆GPS III及后續衛星的核心,在前10顆衛星導航載荷的基礎上進一步改進性能,精度提升了3倍,抗干擾能力提升了8倍;實現了70%的數字化,優化了發射器、抗輻射處理器、原子鐘等系統互聯性,以增強導航信號;可將GPS III衛星的在軌壽命延長至15年,比當前在軌的GPS衛星高出25%。2019年11月,美空軍稱計劃研制并于2023年向地球靜止軌道發射導航技術衛星-3(NTS-3),該衛星安裝實驗型天線,使用靈活安全的信號,增加自主能力,可在軌重編程,通過數字簽名增強抗欺騙能力,波束覆蓋區域可調,在受攻擊或干擾后可快速恢復。NTS-3是美空軍繼GPS之后,40年來首次開展的開拓性項目。圖1為目前已在軌或即將在軌運行的NTS-1、NTS-2和NTS-3衛星。

圖1 NTS-1、NTS-2和NTS-3衛星Fig.1 Diagram of satellites NTS-1,NTS-2 and NTS-3
(2)俄羅斯繼續提高GLONASS的導航精度
2019年4月,俄羅斯航天國家集團公司(Russian Space National Corporation)副總經理Urlichich透露,2025年俄羅斯GLONASS的導航精度將提高25%。Urlichich在Moscow導航學術會議上表示,2025年前系統高軌段預計部署6顆衛星,首顆衛星將于2023年投入運行,這將使半個地球導航精度提高25%。2020年后,GLONASS在國外部署的地面站數量將從6個增加到12個,俄羅斯境內則從19個增加到45個。目前,GLONASS有26顆在軌衛星,其中的23顆運行正常。圖2為已在軌運行的GLONASS-K衛星。

圖2 GLONASS-K導航衛星Fig.2 Diagram of GLONASS-K navigation satellite
(3)歐盟的Galileo衛星導航系統再出故障,聚焦GPS拒止環境下新型導航技術的研發
2019年7月,歐洲全球導航衛星系統局(European Global Navigation Satellite Systems Agency,GSA)發布了Galileo系統服務降級告警,目前在軌26顆衛星的信號均不能達到最低的導航性能要求,且未給出明確的恢復時間。另據國際衛星導航系統監測評估中心稱,Galileo系統疑似在7月10日14時出現衛星導航信號異常,其廣播星歷不能正常更新,全部衛星處于一種持續的非正常狀態。Galileo是歐盟自主發展的導航衛星系統,由30顆衛星組成,包括24顆工作衛星和6顆備用衛星,計劃于2020年完成星座建設。此外,Galileo系統2017年也曾出現多顆衛星星載原子鐘失效故障。圖3為Galileo衛星導航系統體系結構。
圖3 Galileo衛星導航系統體系結構Fig.3 Architecture of Galileo navigation satellite system
2019年10月,歐洲導彈集團(MBDA Missile Systems Inc,MBDA)和空客防務與航天公司(Airbus Defence and Space)、法國宇航院(ONERA)合作為未來遠程巡航導彈系統發展一種新的導航技術,該技術利用衛星通信信號使導彈在射程范圍內保持導航精度。MBDA稱衛星通信輔助導航技術將作為英法合作的導彈材料/組件創新與技術合作(MCM-IPT)計劃下的彈性與自主衛星通信導航(REASON)項目的一部分而進行首次演示,REASON項目旨在評估采用特定衛星信號作為輔助導航手段的技術和系統級可行性。MBDA牽頭了歷時一年的REASON項目研究,并提供用于評估的性能指標,空客公司負責概念系統及其演示,法國宇航院提供仿真環境。
(4)印度NavIC衛星導航系統接口規范獲準應用
2019年10月,全球無線通信標準組織(3GPP)已經接受了印度NavIC衛星導航系統的接口規范[2]。根據此許可,NavIC可以集成應用于智能手機和平板電腦等設備中。接口規范的獲準應用極大地促進了印度移動電信業的發展,同時也促進了NavIC在整個亞太地區的應用。相對于目前使用的美國GPS系統,需要位置信息的智能電話和蜂窩物聯網(IoT)設備將開始使用NavIC系統,這將促進NavIC技術在4G、5G和物聯網(IoT)大眾市場的應用,而與NavIC相關的IC及其產品的設計研發也將給印度公司和創業公司帶來發展商機。隨著系統在其他國家的推廣應用,芯片及其產品也有著極大的市場發展潛力。NavIC由ISRO研發,目前有8顆在軌衛星,7顆用于導航,1顆用于消息傳遞,覆蓋印度及其周邊地區1500km的區域,計劃將進一步擴展系統的應用。圖4為印度NavIC衛星導航系統的示意圖。

圖4 印度區域衛星導航系統NavICFig.4 Diagram of Indian regional satellite navigation system NavIC
在衛星導航領域,一方面,以美國為首的導航大國持續推進導航衛星的研發與部署,不斷提升導航系統精度;另一方面,為確保GPS拒止環境下的導航功能,各個國家積極開發新型導航技術及相關替代導航技術。
2 慣性導航
慣性導航技術是一種通過測量飛行器的角速度/線加速度,并自動進行積分運算,獲得物體瞬時速度和瞬時位置數據的技術。慣性導航系統的設備都安裝在運載體內,工作時不依賴外界信息,也不向外界輻射能量,不易受到干擾,是一種自主式導航系統。作為慣性導航系統的核心,以陀螺為代表的敏感器件是決定慣導系統性能的關鍵因素。
(1)美國陸軍繼續采購基于激光陀螺的慣性導航系統,激光陀螺仍是陸用戰車、導彈等武器裝備的重要選擇之一
2019年9月,美國陸軍合成司令部(U.S.Army Forces Command)宣布與Honeywell公司簽訂了價值3790萬美元的戰術先進地面慣性導航裝置(TALIN)5000型采購合同,預計2023年9月完成。TALIN 5000系統尺寸為5.4in×7.6in×8.6in,質量為13lb,可在-46℃~+71℃環境中工作;在18V~32V直流電下工作時,功耗小于26W;使用標準的內部三軸慣性傳感器,角速率為200(°)/s;平均故障間隔時間超過50000h,可連接多種接收機設備。該系統采用Honeywell公司的環形激光陀螺技術和加速度計,提供GPS拒止環境下的導航,適用于苛刻的軍事和商業環境,可用于軍用車輛、主戰坦克、火炮系統、雷達和衛星通信穩定器、導彈發射器等。圖5為TALIN 5000慣性導航裝置的示意圖。

圖5 TALIN 5000慣性導航裝置Fig.5 Diagram of TALIN 5000 inertial navigation unit
(2)國外不斷推出光纖慣性導航系統,干涉型光纖陀螺慣性系統性能接近激光陀螺慣導系統,并逐漸用于戰略武器
2019年5月,美國Northrop Grumman公司推出了光纖慣性導航系統SeaFIND,可提供與MK39環形激光陀螺羅盤系列慣性導航產品相同的性能水平,且尺寸大大減小,僅為250mm×250mm×127mm,質量僅為4.9kg。SeaFIND可滿足小型艦艇的需求,包括無人潛航器、無人水面艇、近海巡邏艇及其他中小型水面艦艇。2019年11月,美國海軍宣布將從2020財年開始通過戰略系統項目發展新技術,以將現役三叉戟D5潛射戰略導彈的使用期限延長至2080年,并持續保持導彈的作戰能力現代化。三叉戟D5導彈延壽項目(D5 LE)進展順利,在2019財年完成了5次飛行測試,D5 LE2項目工作重點之一是將導彈使用的靜電陀螺升級為光纖陀螺,以提高導彈的打擊精度,這標志著干涉型光纖陀螺慣性系統逐漸用于戰略武器。圖6為SeaFIND慣性導航系統示意圖。
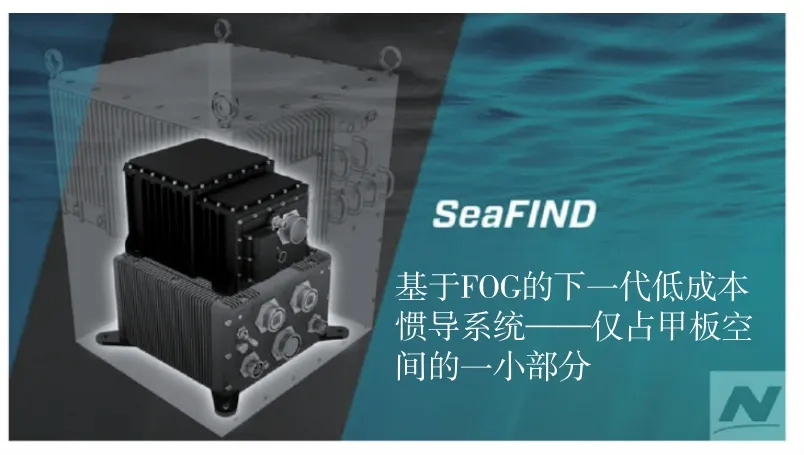
圖6 SeaFIND 慣性導航系統Fig.6 Diagram of SeaFIND inertial navigation system
(3)在DARPA項目支持下,微機電(Micro Electro Mechanical System,MEMS)陀螺精度不斷提高,并有望實現光纖陀螺替代方案
在DARPA微型速率積分陀螺(Micro Rate Integrating Gyroscope,MRIG)項目支持下,美國Michigan大學的研究人員成功研制了一種Q值達154萬的真空封裝熔融石英微諧振陀螺,零偏穩定性達0.0103(°)/h。此外,2019年4月,Honeywell公司報告了其用于平臺穩定的MEMS面外陀螺性能結果,實現了優于0.006(°)/h1/2的角度隨機游走和0.2(°)/h的零偏穩定性。作為驅動和檢測模態下的特征傳感器,頻率間隔大于700Hz,從而允許帶寬大于300Hz。HG6900 IMU將集成這些傳感器,體積為259cm3。2019年9月,Honeywell公司推出了基于MEMS技術的HGuide i300 IMU和HG4930 S-Class IMU兩款新型IMU,力求實現小型化、低功耗和經濟高效的光纖陀螺替代方案[3]。圖7為HG4930 S-Class MEMS IMU產品示意圖。
(4)以美國、法國為首的國家繼續推進半球諧振陀螺的研究,半球諧振陀螺性能不斷提高、尺寸不斷減小,在航天、航空、車輛、船舶等導航領域有著廣闊的應用前景
2019年8月,美國Northrop Grumman 公司披露其在多年半球諧振陀螺研究的基礎上,正在開發新型LR-450 IMU中的毫米半球諧振陀螺,專為質量更輕、成本更低的小型平臺而設計[4]。2019年9月,賽峰電子與防務公司(Safran Electronics &Defense)報道了半球諧振陀螺的最新進展,基于該陀螺的BLACK-ONYXTMDUAL CORE HP 慣性導航系統質量小于 25kg,尺寸小于 0.028m3,功耗小于50W,精度達 1nmile/120h。憑借著半球諧振陀螺的超高SWaP性能,GEONYXTM慣性導航系統可用于火炮和戰車的精確導航和指向,SpaceNaute慣性參考系統已被歐洲Ariane6太空發射器選用,Sterna超輕尋北儀可用于士兵指向應用和便攜式系統[5]。圖8為賽峰電子與防務公司的慣導系列產品。

圖 7 HG4930 S-Class MEMS IMU 產品Fig.7 Diagram of HG4930 S-Class MEMS IMU

圖8 賽峰電子與防務公司基于HRG 技術的慣導系統Fig.8 INS based on HRG Technology developed by Safran Electronics & Defense
在慣性導航領域,光學陀螺技術目前處于最成熟階段,未來其精度從戰術級、導航級逐漸延伸到戰略級;MEMS 陀螺目前已在戰術級占據主導地位,后續在微納米技術和微加工藝等發展的推動下,精度將覆蓋導航級;半球諧振陀螺在同等精度陀螺中具有體積質量優勢,并逐步在空間、航空、航海等領域開展應用,成為近期慣性技術領域研究熱點之一[6]。
3 其它導航
3.1 天文導航
天文導航建立在慣性參考系基礎上,運用天體測量儀器來獲取天體相對于測量點的天體方位和高度等信息,并解算出導航信息。常用的天文導航儀器有星體跟蹤器、天文羅盤和六分儀等。
星體跟蹤器能從天空背景中搜索、識別和跟蹤星體,并測出跟蹤器瞄準線相對于參考坐標系的角度。2019年5月,美國空軍研究實驗室(Air Force Research Laboratory,AFRL)計劃簽訂一份天文輔助導航技術研發合同,降低GPS 拒止環境中制導、控制的風險,特別是在沙漠、水、雪和冰等地形惡劣的區域。研究重點是開發一種星體跟蹤器,能夠可靠地對9km ~24km 高度進行天文觀測。星體跟蹤器應能全天候工作,滿足苛刻的環境要求,必要時提供指向能力。
3.2 視覺導航
視覺導航是通過攝像機對周圍環境進行圖像采集,并對圖像進行濾波和計算,完成自身位置確定和路徑識別,并做出導航決策的一種導航技術。美俄長期開展圖像、激光、無線電等信號的特征提取與頻譜分析,融合被動圖像數據、數字海拔地形數據等可用信息,相繼建立了基于視覺信號源的特征數據庫。針對環境地圖信息完整時的路徑規劃問題,利用超平面定義無碰撞區域,實現了密集障礙物環境下的穩定避障。
2019年3月,Draper實驗室開發了Monarch系統,該系統使用攝像機圖像和慣性測量來計算單位移動時位置和方向的變化,是視覺輔助導航的一種形式。2019年4月,美國宇航局機構選擇Draper實驗室對多環境導航儀(DMEN)進行飛行測試,以測試精確登陸月球所需的基于視覺的導航技術。該系統包括慣性測量單元傳感器,其算法功能強大將傳感器數據處理為導航解決方案,從而提供了視覺慣性測距和基于視覺地形的絕對定位的功能。此外,Draper實驗室還提出一種SAMWISE視覺輔助慣性導航系統,能夠在充滿障礙物的室內和室外環境中進行高動態飛行,在開放的戶外環境中進行了高達20m/s的飛行,位置誤差約為3%。
此外,德國München工業大學的團隊設計了一種低成本無人機,可在沒有GPS的環境中進行視覺導航,不需要人工地標或環境的先驗知識,系統由單目即時定位與地圖構建(SLAM)系統、擴展Kalman濾波器和用于生成轉向指令的PID控制器組成,實現了4.9cm(室內)和18.0cm(室外)的平均精度)。美國噴氣推進實驗室(Jet Propulsion Laboratory,JPL)提出了一種通用的面向行星著陸的地形相對導航方案,試驗結果表明該方案的導航精度優于10m。在此基礎上,NASA開發了著陸器視覺系統。
3.3 數據庫匹配導航
數據庫匹配技術主要包括景象匹配定位技術、地形地貌匹配技術、地圖匹配技術、重力匹配技術、地磁匹配技術等。
重力匹配技術方面,側重發展低漂移、高精度的重力傳感器以提高水下動態重力測量精度,設計新的多傳感器數據融合方案完成重力儀的水下定位。日本Tokyo大學利用了Micro-G Lacoste公司新式的重力儀L&RS-174,用自主式水下航行器較大范圍測量的重力數據重復精度可達0.1mGal,重力場的空間分辨率可達75m。
地形地貌匹配技術方面,Draper實驗室開發的一種地形相對導航系統于2019年9月11日在California的Mojave沙漠通過裝載在Masten空間系統公司的Xodiac火箭上進行了測試。
地磁匹配技術方面,迫切需要精確的地磁場模型和地磁圖制備技術。2019年,韓國先進科技研究院(Korea Advanced Institute of Science and Technology,KAIST)提出了一種結合兩個對稱卷積網絡(CNN)和歸一化互相關(NCC)的最新方法,最佳和最差地磁剖面的平均匹配率在98.6%以上。
3.4 仿生導航
仿生導航技術已開展了仿生光流、偏振光、類腦和地磁導航等方向的研究,在算法和器件上還有很大的發展空間。受器件靈敏度、加工工藝與材料的限制,仿生導航的穩定性和靈敏度還達不到較高水平,未來可利用生物基因工程與微納加工制造技術改進現有的仿生導航器[7]。
仿生光流方面,美國Minnesota大學的研究人員于2019年介紹了一種自適應光流算法。通過逐步使用更多部分的圖像信息,在不利條件下(如在黑暗、無紋理地板上飛行時)精確地估計了四旋翼飛行器的水平速度,提高了精確度。
偏振光導航方面,日本Tokyo工業大學的研究團隊設計了非正交結構的小型偏振光導航傳感器,與磁傳感導航水平相當,回遠點實驗誤差為0.5m(大約在 4m×2m范圍內)。法國Aix-Marseille大學的研究團隊設計了一種仿生天體羅盤應用于螞蟻機器人的自主導航方法。實驗結果顯示,穩態航向誤差為0.3°(晴天)~1.9°(多云),這種新的光學羅盤適用于自主領域機器人導航任務。德國Würzburg大學的Jundi團隊發現偏振信息被編碼在糞甲蟲的視神經葉、前視神經結節、球莖和中央復合體(紅色通道和紅色大腦區域)中,在中央復合體處理后,信息被傳遞到胸神經節的運動控制中心的下降神經元,接著糞甲蟲中央復合體的擬議信息流與其他昆蟲的信息流一致。
3.5 量子導航
量子傳感技術極限精度高,且體積減小后的精度衰減小,可利用量子導航等新型導航技術實現導航轉型。根據定位方式的不同,在衛星有源導航系統與慣性無源導航系統的基礎上分別發展出了量子有源導航系統和量子無源導航系統:量子有源導航系統采用發射和接收量子信號的方法,定位過程通常使用衛星作為信號源;量子無源導航系統使用量子傳感器設備進行定位,不需要外部信號,通常通過檢測加速度來定位[8]。
量子有源導航中,需重點關注的有光子糾纏態的制備,捕獲、跟蹤和瞄準系統及技術,量子時鐘同步技術等。其中,量子態精確操控與全局糾纏的研究成果表明,目前可實現5量子態全局糾纏,可精確操控20個量子態并實現量子糾纏[8]。
量子無源導航中,原子陀螺、加速度計和原子鐘是量子無源導航系統的核心模塊,它們的性能直接影響著系統的定位性能。美國將芯片級原子鐘作為十大未來先進技術之一予以優先支持,并制定了10年的發展計劃。目前,美國Symmetricom公司生產的芯片級原子鐘產品功耗為125mW,體積為16cm3,頻率穩定度約為3×10-10τ-1/2。英國帝國理工學院開發了一種基于冷原子的加速度計,穩定性比傳統的高約1000倍,并作為了潛艇量子導航系統的一部分。在DARPA的ACES計劃支持下,美國噴氣推進實驗室(Jet Propulsion Laboratory,JPL)、NIST研究院與Honeywell公司三個團隊開發的新一代芯片級原子鐘在性能優化上取得突破性進展,關鍵性能參數提高了1000倍[9],具體如圖9所示。隨著原子慣性傳感器精度的不斷提高,由此類傳感器構成的慣性系統精度有望達到5m/h的近地導航極限精度。
圖9 ACE計劃下三個團隊的研究過程與結果Fig.9 Research process and results of the three teams under the ACE program
3.6 全源導航
全源導航就是利用所有可利用的導航信息源為用戶提供衛星信號拒止時的高精度PNT功能,滿足不斷變化的任務需求與環境要求,實現低成本、快速系統重構、在線配置和即插即用的新興組合導航系統。該系統以慣性導航技術為基礎,通過天文、無線電、相機、磁力計和電臺等多種輔助傳感器信息集成融合協同,利用所有可能利用的導航信息源,包括慣性導航、衛星導航、視覺導航、協同導航等,形成能克服單一導航系統缺點和弊端的組合導航系統,提高導航系統的容錯性與自適應性。全源導航定位涉及到光、電、磁、力、聲等跨域幾十種傳感信息,各傳感器信息的數學模型、時空基準、噪聲類型、質量和一致性等均存在差異,且信息表征隨外界環境和時間不斷變化,如何實現各傳感器信息的智能融合是全源導航必須解決的科學問題。與單一導航技術相比,這種自主性的導航技術將是未來智能導航的發展方向。
2010年,全源導航的概念正式被提出。美國DARPA設立了全源導航系統計劃,該項目分為三個階段實施,分別致力于導航算法與軟件架構、系統集成與方案測試以及演示驗證等方面的研究。美國Massachusetts理工學院(MIT)開展了基于三叉樹的傳感器最優子集在線選擇方法研究,實現了傳感器的有效利用并提高了組合導航精度。美國Georgia理工學院研究了基于因子圖的多源信息融合算法,實現了比傳統擴展Kalman濾波器更高的精度。美國Stanford大學重點研究了導航系統故障診斷試驗平臺,完成了系統故障診斷與容錯技術的試驗驗證。據DARPA在2019年6月公布的最新結果顯示,美國空軍研究實驗室(Air Force Research Laboratory,AFRL)采用慣性、攝像頭、磁力計等傳感器,在衛星拒止環境下實現了20m的定位精度,并在艦艇、飛機、車輛上完成了演示[10],如圖10所示。
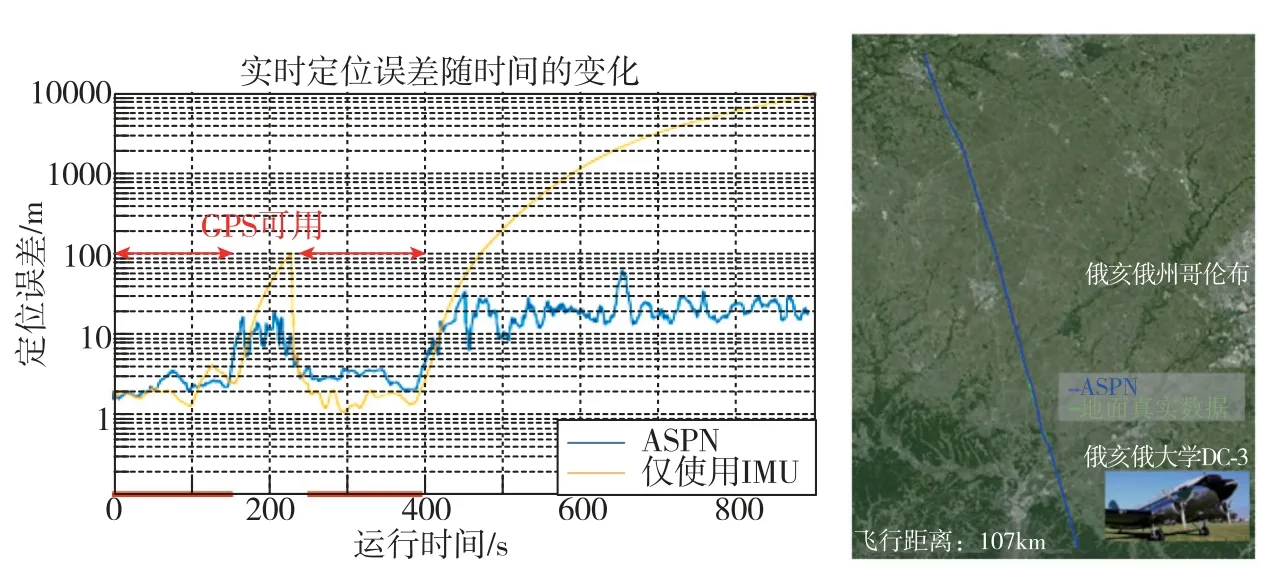
圖10 ASPN計劃試驗結果Fig.10 Test results of ASPN program
4 技術展望
科技影響戰爭模式,國防促進科技發展。第三次科學革命促成第四次工業革命,同時萌發了第四次物理學革命,形成了以大數據、人工智能和量子、量子糾纏為標志的現代高科技,空間探測、空間競爭和空間安全、未來戰爭新常態和太空競爭經濟新趨勢已見端倪,多維大跨域、立體交叉、高端博弈、無人智能多信息融合、協同精確打擊和快速多源多模式能量對抗新的戰爭模式已經形成。加上美國第三次抵消戰略的影響,體系協同一體化適應未來戰爭體系信息化、跨越高速多源化適應未來戰爭立體多維化、自主小型平臺化適應未來戰爭無人智能化裝備顛覆創新,給國防現代裝備的導航與控制、穩姿與穩向核心技術裝備提出了更高新要求。為此,應充分發揮全源全系統全流程區塊鏈、大數據集成運算推演解算剖析、數字孿生虛擬仿真,發現新導航控制規律,科學優化全系統指標分配體系,創新導航控制新的基礎理論方法,提升全系統整體應用性能精度。
1)作為PNT體系的基礎和主要信息源,GPS信號易受各種自然和人為干擾源的影響,軍用GPS制導武器可能受到干擾甚至欺騙,關鍵基礎設施對GPS的民用需求也不斷增長,將會對利用GPS保持PNT優勢產生限制,只有持續提升GPS能力才能有效保障PNT服務。未來,美國、俄羅斯、歐盟、日本等國家和地區將持續推進導航衛星的研發與部署,不斷提升導航系統精度。此外,為確保GPS拒止環境下的導航功能,各個國家也在積極開發新型導航技術及相關替代導航技術。
2)慣性導航系統是人工智能信息敏感、操控、制導之源頭,是國防裝備精確打擊的基礎。傳統機械轉子式慣性導航系統經過以兩小(減小摩擦力、減小體積)一高(提高精度)為終極目標、六代九種模式的不斷進化,體積減小到原來的1/60,摩擦力減小到原來的1/150,精度提高4~5個數量級,但是其復雜程度和工藝實現難度也相應提高了幾十倍。至此,光學、波動式、量子慣性產品已成趨勢,主導著導航控制的今天和未來。因此,在應用挖掘好光學、波動慣性導航系統應用的基礎上,著力新型量子及量子糾纏技術慣性導航系統和光動力懸浮力學疊加技術慣性產品研究,適應未來新一代高科技高要求導航。
3)在衛星導航拒止和極端復雜環境任務剖面下,無源慣性基導航系統依然是高精度導航的根基,必需在追求儀表精度基礎上,正確認識慣性平臺系統和慣性捷聯系統的各自優勢,同時積極發展新型慣性平臺系統和以慣性導航為基礎的多信息融合、多源復合導航系統。大量異類傳感器信息整合,系統結構復雜,各種不同的導航方式都存在自身缺陷。因此,全源導航系統必須融合多種異類傳感器信息,必須有復雜的異形結構和多模式算法軟件的銜接支撐,必須有各導航系統重新配置和即插即用結構支撐,必須有多種復雜環境的適應性。
4)組合導航系統誤差建模與評估、在線重構框架及算法、系統智能主動容錯處理的多任務剖面要求能夠處理復雜環境實時應用和不同故障模式下導航系統故障傳播機理分析與判別,以提高容錯結構對干擾的自適應性,保證導航系統良好的穩定性、連續性、抗干擾性和高精度的導航性能。
5)沒有測量就沒有科學,測量檢測和試驗驗證是高精密導航設備性能保證的基礎,是導航設備數字誤差模型擬合迭代修正改進提升的橋梁,是完善驗證誤差模型的必需。要重視超高精度檢測試驗,同時要注重多項技術綜合實驗的理論方法,要注重誤差激勵機理、試驗手段和規范標準體系的完善及研究。
5 結論
導航技術已成為人類全方位活動的重要支撐,是現代工業數字化、智能化的基礎,更是現代國防裝備精確打擊的關鍵。世界航天已進入大規模進出空間和地月空間經濟的新時代,精確可靠的導航技術是保證航天運輸、重復使用航天運載系統和未來可學習可訓練智能航天器安全入軌及精準返回的重要技術途徑。應重視創新發展導航定位和控制技術,尤其是無源慣性導航系統、慣性基多信息融合和多源復合導航定位控制系統以及量子導航等新型導航系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32