考慮駕駛風(fēng)格的模糊控制跟馳模型
2020-06-17 02:11:46李林波
關(guān)鍵詞:模型
吳 兵,羅 雪,李林波
(同濟(jì)大學(xué)道路與交通工程教育部重點(diǎn)實(shí)驗(yàn)室,上海201804)
車輛跟馳模型是微觀交通流的一個(gè)基本模型[1],傳統(tǒng)跟馳模型中,后車的駕駛決策與前車的刺激存在著一一對(duì)應(yīng)的關(guān)系。在實(shí)際行駛過(guò)程中,駕駛?cè)藢?duì)其他車輛的行駛狀態(tài)所作出的反應(yīng),不一定是線性關(guān)系,更多的是根據(jù)駕駛經(jīng)驗(yàn)和駕駛情況所決定的,因此引入模糊控制跟馳模型,來(lái)模擬駕駛?cè)藢?duì)于車輛決策的過(guò)程。
最早把模糊控制方法引入跟馳模型的學(xué)者是Kikuchi 和Chakroborty[2],在實(shí)際道路條件下,對(duì)一輛跟馳車輛采集其車頭時(shí)距和速度數(shù)據(jù),對(duì)人的感知和推理過(guò)程中固有的不精確性進(jìn)行了研究,建立模糊控制規(guī)則并進(jìn)行仿真模擬,結(jié)果表明,與傳統(tǒng)GM(general motors)模型相比,該模型具有局部穩(wěn)定性,在一定程度上能夠預(yù)測(cè)駕駛?cè)嘶蜍囕v反應(yīng)的變化。在此基礎(chǔ)上,Khodayari 等[3]將模糊控制的輸入?yún)?shù)增加為瞬時(shí)反應(yīng)延遲、相對(duì)速度、相對(duì)距離和后車速度,通過(guò)NGSIM(next generation simulation)數(shù)據(jù)進(jìn)行了模型驗(yàn)證,證明其對(duì)駕駛?cè)诵袨轭A(yù)測(cè)方面效率較高。Mar和Lin[4]對(duì)跟馳模型的模糊控制系統(tǒng)進(jìn)行了持續(xù)的研究,首先提出了一種基于自適應(yīng)網(wǎng)絡(luò)模糊控制系統(tǒng)的汽車追尾防碰控制器,解決前車與后車距離和相對(duì)速度的振蕩問(wèn)題,隨后提出了一種基于模糊函數(shù)網(wǎng)絡(luò)的汽車跟馳防碰控制器,實(shí)現(xiàn)汽車速度的非線性控制[5],然后提出了一種基于級(jí)聯(lián)模糊控制系統(tǒng)的車輛跟馳、變道防碰系統(tǒng)設(shè)計(jì)方案[6]。Xiong[7]對(duì)模糊控制模型的隸屬度函數(shù)進(jìn)行研究,采用最小二乘法對(duì)離散數(shù)據(jù)進(jìn)行擬合,得出隸屬度函數(shù)。王文清等[8]提出了考慮最小安全距離的跟馳模型,用模糊控制來(lái)模擬駕駛?cè)丝刂栖囕v的行為。邱小平等[9]建立相應(yīng)的車輛跟馳模糊控制系統(tǒng),采用NGSIM 數(shù)據(jù)進(jìn)行模型標(biāo)定,并與Gipps 模型進(jìn)行對(duì)比評(píng)價(jià),發(fā)現(xiàn)模型擬合更優(yōu)。
目前大部分基于模糊控制的跟馳模型,假設(shè)駕駛?cè)说鸟{駛行為方式相同,然而,在真實(shí)的交通流中,駕駛?cè)说哪挲g、身體素質(zhì)、反應(yīng)敏感性、駕駛技能等個(gè)體差異導(dǎo)致了不同的跟馳行為[10-12],同時(shí)駕駛?cè)诵睦砩砘顒?dòng)是不確定的、復(fù)雜的[13],同一數(shù)學(xué)模型無(wú)法準(zhǔn)確描述所有駕駛?cè)说母Y行為。因此,有學(xué)者開(kāi)始對(duì)不同類型的駕駛?cè)说奶攸c(diǎn)進(jìn)行研究,將駕駛?cè)朔譃榧みM(jìn)型、溫和型和保守型三種,但在隸屬函數(shù)劃分部分和模型驗(yàn)證時(shí),由于缺乏真實(shí)數(shù)據(jù)支撐,僅進(jìn)行了定性分析[14]。
實(shí)際上,同一個(gè)駕駛?cè)嗽诓煌瑺顟B(tài)下也會(huì)呈現(xiàn)出不同的駕駛風(fēng)格,基于此,本研究擬針對(duì)不同駕駛風(fēng)格,利用自然駕駛跟馳數(shù)據(jù),定量分析不同駕駛風(fēng)格對(duì)模糊變量的影響,并提出相應(yīng)的模糊控制跟馳模型,深入探討駕駛風(fēng)格對(duì)模糊控制模型的影響。
1 數(shù)據(jù)來(lái)源及處理
1.1 基本數(shù)據(jù)
本研究的數(shù)據(jù)來(lái)自“上海自然駕駛研究”項(xiàng)目的中國(guó)駕駛?cè)俗匀获{駛數(shù)據(jù),數(shù)據(jù)情況見(jiàn)表1。

表1 中國(guó)駕駛?cè)俗匀获{駛數(shù)據(jù)情況Tab.1 Naturalistic driving data of Chinese drivers
1.2 跟馳片段提取
在跟馳片段分析之前,需要確定車輛跟馳過(guò)程中一些關(guān)鍵變量的閾值范圍,因此,參考已有研究[15],對(duì)側(cè)向距離絕對(duì)值、自車速度、縱向距離、相對(duì)速度絕對(duì)值、跟馳持續(xù)時(shí)間的約束見(jiàn)表2,保證車輛處于跟馳狀態(tài)中。

表2 跟馳片段提取準(zhǔn)則Tab.2 Extraction criteria of car-following segment
利用表2 的提取準(zhǔn)則,通過(guò)編程對(duì)跟馳片段進(jìn)行提取,共提取2 350 個(gè)自然駕駛快速路跟馳片段,跟馳片段平均持續(xù)時(shí)間為18.62 s,跟馳車輛的平均車速49.93 km·h-1(13.87 m·s-1),累計(jì)時(shí)長(zhǎng)為729 min。
1.3 跟馳片段分析
分析提取的快速路跟馳片段數(shù)據(jù),車頭時(shí)距分布在0.41~5.95 s之間,平均車頭時(shí)距為1.66 s。每個(gè)跟馳片段的跟馳車輛平均車速與平均車頭時(shí)距散點(diǎn)圖如圖1所示,車頭時(shí)距的直方圖如圖2所示。
由圖1可知,隨著車速增加,車頭時(shí)距變化不顯著,不同車速下車頭時(shí)距的分布較相似,車速和車頭時(shí)距沒(méi)有明顯關(guān)系,同一車速對(duì)應(yīng)不同車頭時(shí)距,反之亦然,無(wú)規(guī)律可循,與文獻(xiàn)[16-18]結(jié)論相似。值得注意的是,車速為20~80 km·h-1的車頭時(shí)距中3 s以上的比較少。從分布圖2 的變化趨勢(shì)觀察,車頭時(shí)距在1.3 s 左右出現(xiàn)概率的峰值,且集中于1~2 s范圍內(nèi),隨著車頭時(shí)距的增加,相應(yīng)比例降低。因此,車頭時(shí)距的分布未以峰值為中心左右對(duì)稱,而是在分布右側(cè)出現(xiàn)“長(zhǎng)尾”現(xiàn)象,呈正偏態(tài)分布,這一分布規(guī)律與文獻(xiàn)[19-20]結(jié)論類似。
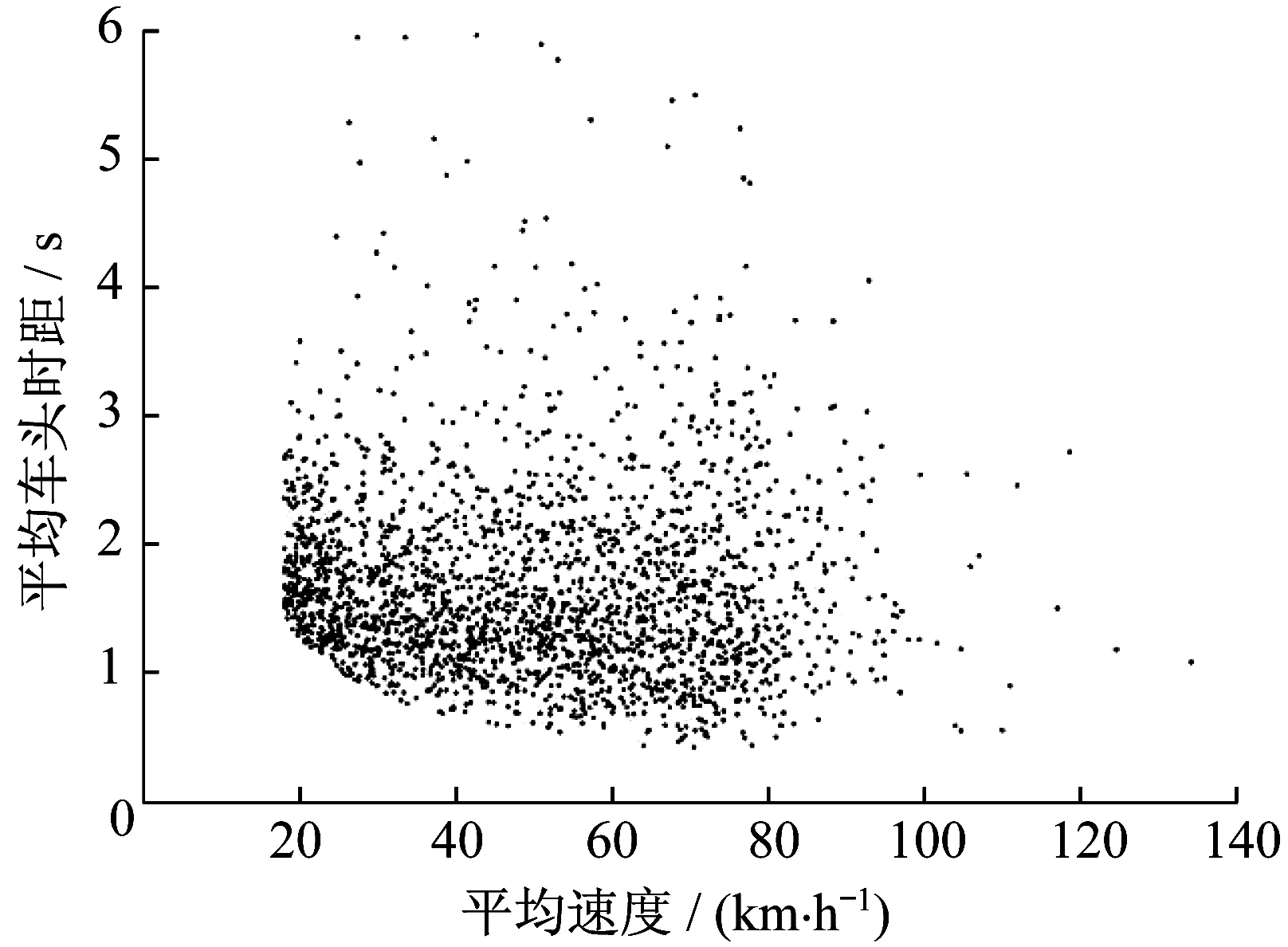
圖1 車速與車頭時(shí)距的散點(diǎn)圖Fig.1 Scatter diagram of speed and time headway
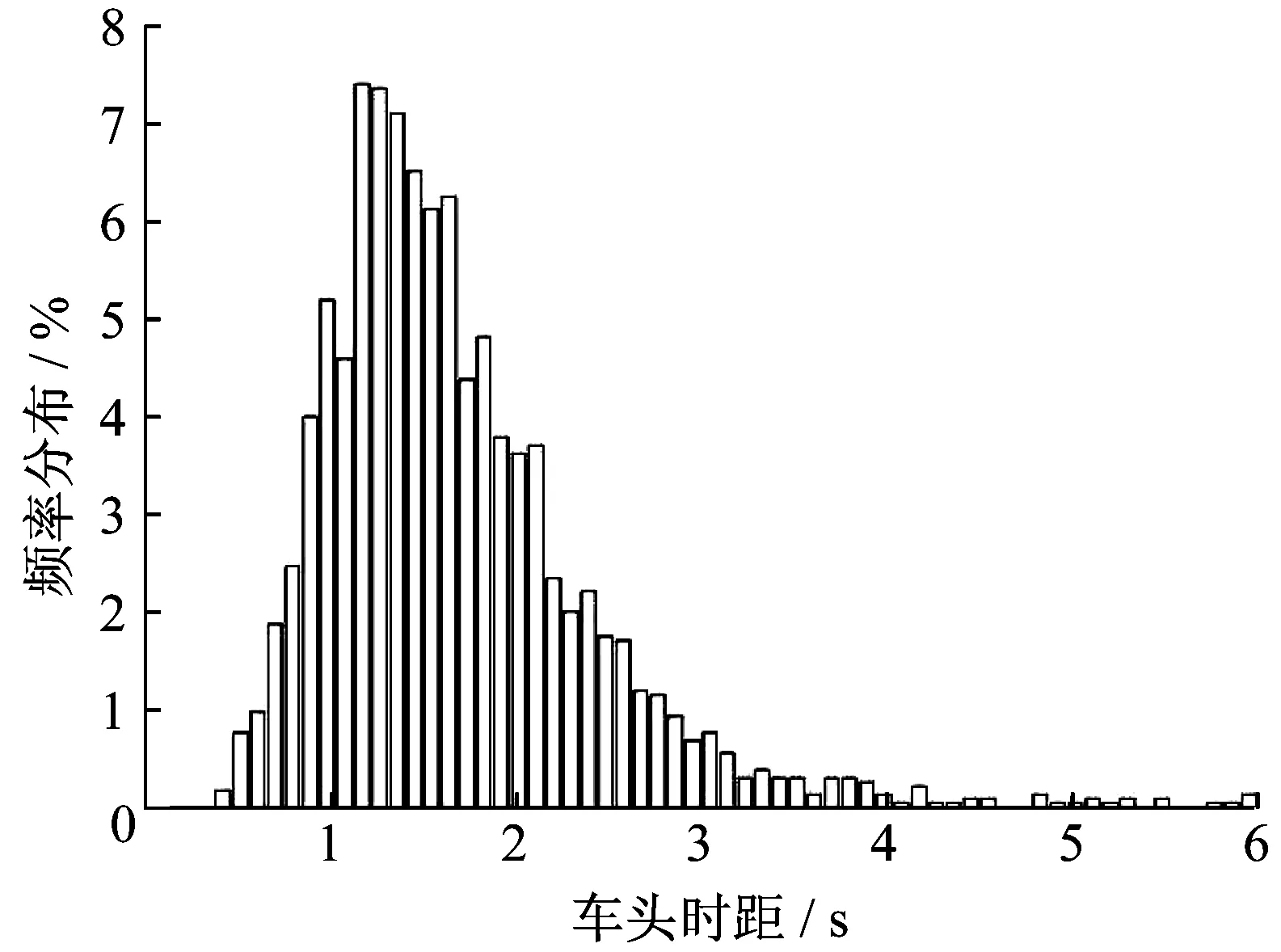
圖2 跟馳片段車頭時(shí)距的頻率分布圖Fig.2 Frequency distribution of time headway in car-following segment
為分析跟馳車頭時(shí)距與駕駛?cè)藗€(gè)體特性的相關(guān)性,對(duì)56 名駕駛?cè)说母Y片段進(jìn)行歸類分析,并按照車頭時(shí)距大小排序,結(jié)果如圖3 所示。圖中每一個(gè)小圖為同一駕駛?cè)说乃懈Y片段車頭時(shí)距分布(按照從小到大排序),橫坐標(biāo)為按照平均車頭時(shí)距大小排列后的跟馳片段序列數(shù),縱坐標(biāo)為駕駛?cè)说拿總€(gè)跟馳片段平均車頭時(shí)距長(zhǎng)度。
由圖3可發(fā)現(xiàn),同一駕駛?cè)嗽诓煌臓顟B(tài)下,跟馳片段車頭時(shí)距分布呈現(xiàn)波動(dòng)性,并且同一駕駛?cè)说母Y片段數(shù)量越多,波動(dòng)性越明顯,表現(xiàn)出駕駛?cè)嗽诓煌瑺顟B(tài)下,心理生理活動(dòng)的不確定性和復(fù)雜性,參考已有的駕駛?cè)朔诸悾?0,12,21-22],將駕駛類型分為三種類型:激進(jìn)型、普通型和保守型。因此,實(shí)際的車頭時(shí)距數(shù)據(jù)可以由三類滿足不同分布的數(shù)據(jù)組成。假設(shè)三類駕駛風(fēng)格車頭時(shí)距滿足正態(tài)分布[19-20],激進(jìn)型的概率密度函數(shù)為f (x)ATH,普通型的概率密度函數(shù)為f (x)NTH,保守型的概率密度函數(shù)為f (x)CTH。則實(shí)測(cè)車頭時(shí)距數(shù)據(jù)應(yīng)滿足理論分布:
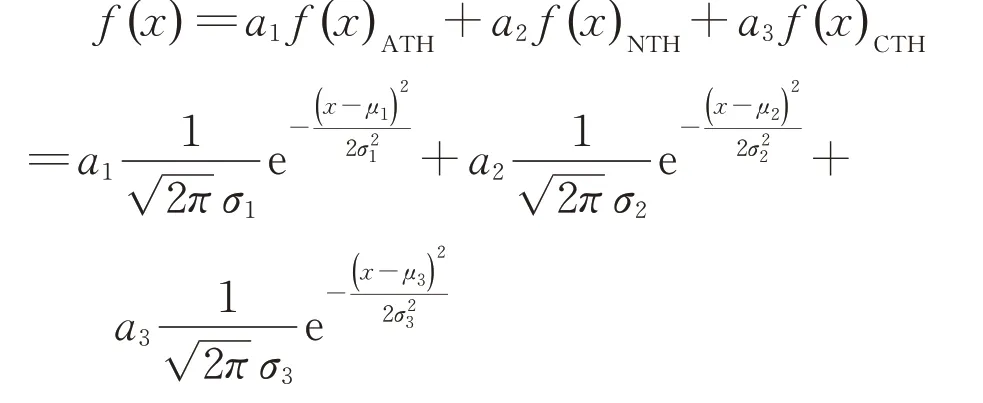
式中:a1、a2、a3為不同類型駕駛風(fēng)格比例,滿足a1+a2+a3=1;μ1、μ2、μ3為正態(tài)分布函數(shù)的位置參數(shù);σ1、σ2、σ3為正態(tài)分布函數(shù)的變異度參數(shù)。
利用MATLAB 中fittype 函數(shù)進(jìn)行混合正態(tài)分布函數(shù)擬合,得到三類駕駛風(fēng)格的期望車頭時(shí)距分別為:μ1=1.15,μ2=1.95,μ3=3.39,根據(jù)期望車頭時(shí)距得出對(duì)應(yīng)的車頭時(shí)距區(qū)間見(jiàn)表3。

表3 期望車頭時(shí)距Tab.3 Desired time headway
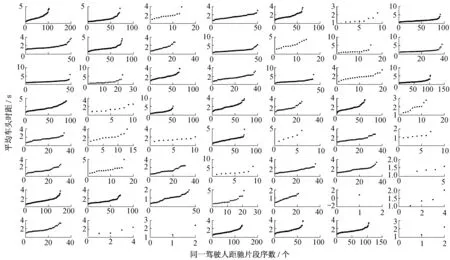
圖3 駕駛?cè)烁Y片段車頭時(shí)距分布Fig.3 Driver based time headway distribution of car-following segment
2 模型建立
設(shè)有論域U,其中的任意個(gè)體u∈U,那么在該論域上的一個(gè)模糊集合A~ 定義為一組有序?qū)~ ={(μA~(u),u)|u∈U}。其中,μA~(u)或μA~?[0,1]是模糊集合A~ 的隸屬函數(shù),它把論域U 中的每個(gè)元素映射到0 和1 之間,越接近1 表征u 屬于μA~ 的程度越高[23]。
設(shè)計(jì)模糊控制原理4 個(gè)計(jì)算步驟:①確定期望距離差和速度差;②把期望距離差和距離差的確切值變成模糊狀態(tài)作為輸入量;③由模糊控制規(guī)則(即合算法)計(jì)算出模糊控制量aF;④將由③算出的模糊控制轉(zhuǎn)化為確切的值加載到對(duì)象上。
2.1 模型變量
基于模糊推理跟馳模型的相關(guān)研究[2,4-7,22],本研究的輸入變量:
(1)后車與前車的實(shí)際距離ΔlR與期望距離ΔlD之差Δl:

式中:期望距離ΔlD為期望車頭時(shí)距tHW和后車速度vF之積[24]。
(2)前車速度vL與后車速度vF之差Δv:

輸出變量:后車加速度aF:

2.2 變量論域
根據(jù)模糊控制參數(shù)論域的確定方法,在提取的跟馳片段中,對(duì)前車與后車的車頭間距進(jìn)行計(jì)算,每個(gè)跟馳片段提取最大車頭間距、最小車頭間距、平均車頭間距,如圖4 所示,并分別與期望距離求差值,如圖5所示。后車與前車的實(shí)際距離ΔlR與期望距離ΔlD之差Δl ∈(-40,40),單位:m,若分為11 級(jí),期望距離差論域X:

取7 個(gè)語(yǔ)言值,A~i(i=1,2,…,7)是論域X 上的模糊集,分別代表正大(PB)、正中(PM)、正小(PS)、零(Z)、負(fù)小(NS)、負(fù)中(NS)和負(fù)大(NB),隸屬函數(shù)采用三角形函數(shù)分布。
同理,前車速度與后車速度之差如圖6 所示,Δv ∈(-5,5),單位:m·s-1,速度差論域Y:

取7個(gè)語(yǔ)言值,B~j(j=1,2,…,7),隸屬函數(shù)采用三角形函數(shù)分布。
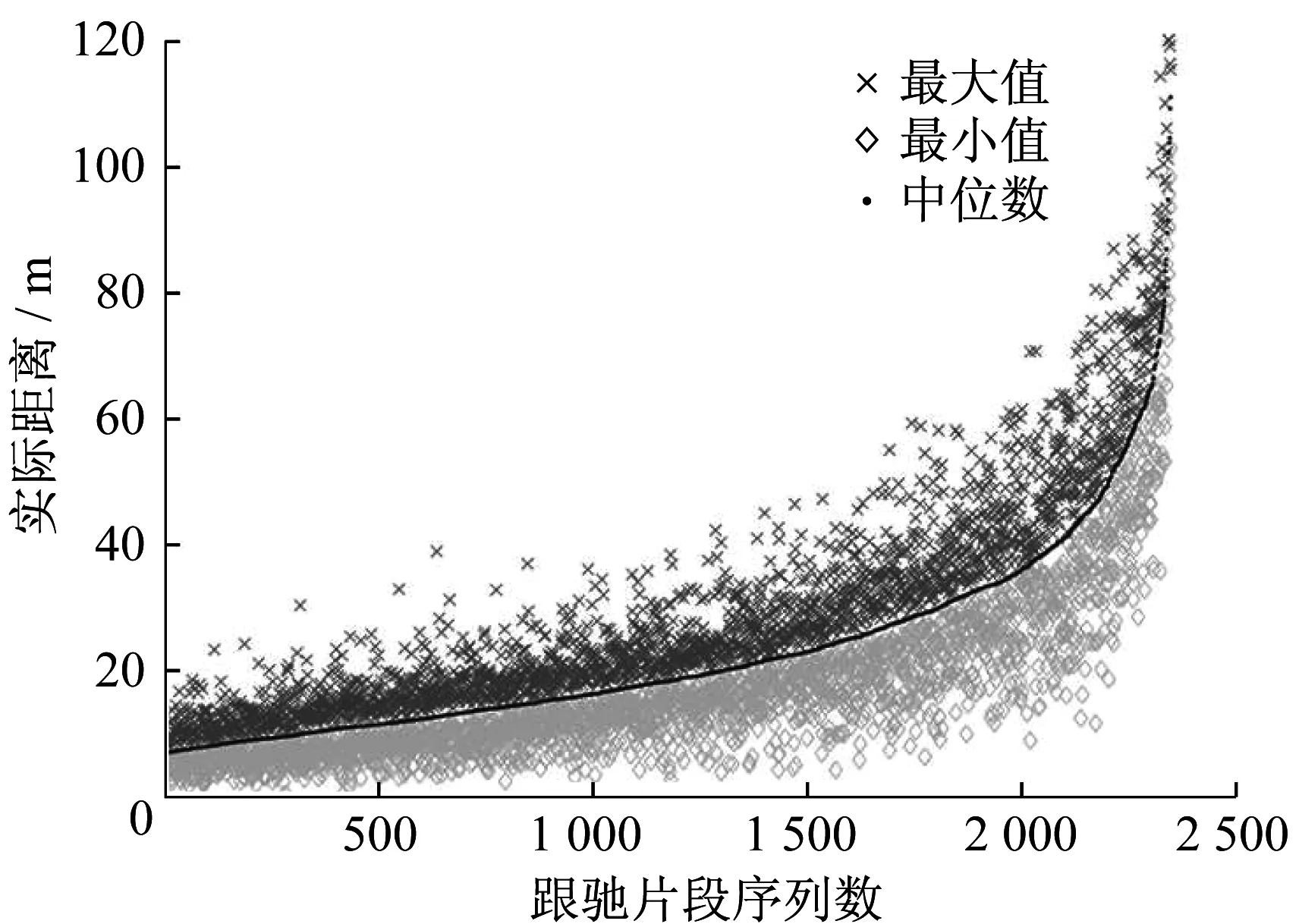
圖4 前車與后車實(shí)際距離Fig.4 Actual distance between the front vehicle and the rear vehicle
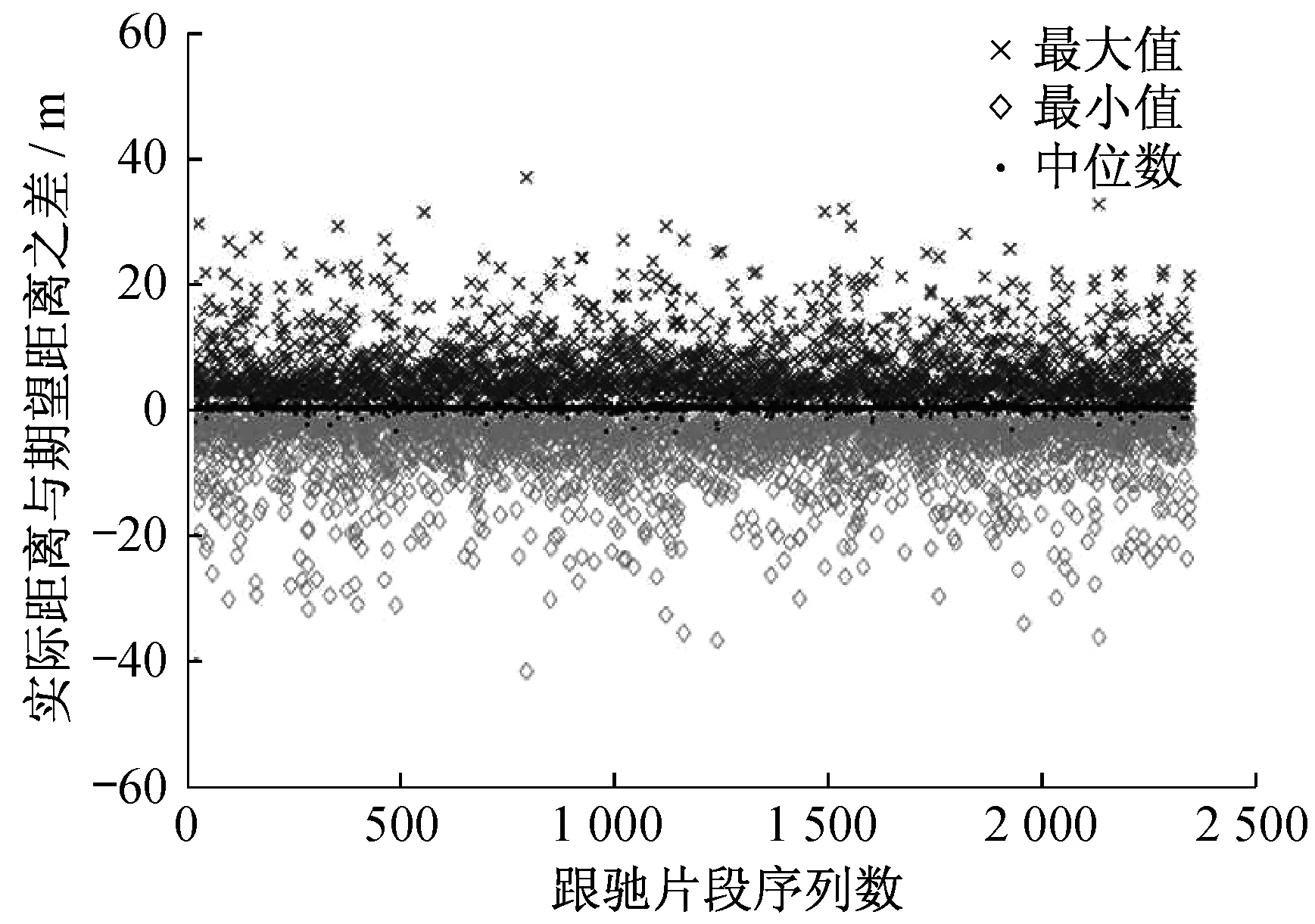
圖5 實(shí)際距離與期望距離之差Fig.5 Difference between the actual distance and the expected distance
后車加速度如 圖7 所示:aF∈(-9,3),單位:m·s-1,其論域?yàn)閆:

取7 個(gè)語(yǔ)言值,C~k(k=1,2,…,7),隸屬函數(shù)采用三角形函數(shù)分布。
2.3 模糊控制的跟馳模型建立
模糊控制規(guī)則用下列符合條件語(yǔ)句表示:
每一條語(yǔ)句對(duì)應(yīng)一個(gè)模糊關(guān)系,即:

根據(jù)數(shù)據(jù)規(guī)律,確定49 條模糊控制規(guī)則,如表4所示。
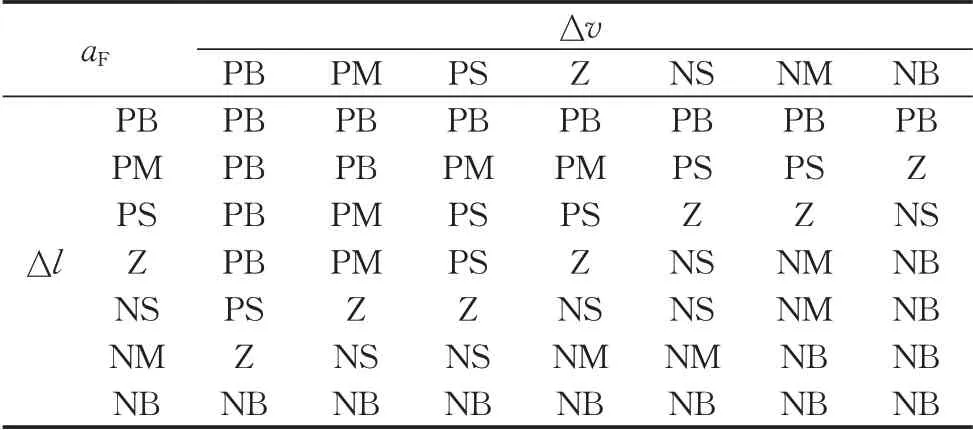
表4 模糊控制規(guī)則表Tab.3 Fuzzy control rules
根據(jù)模糊控制原理建立考慮駕駛風(fēng)格的模糊控制跟馳模型框架[25],如圖8所示,其中將不同的駕駛風(fēng)格轉(zhuǎn)化為車頭時(shí)距,通過(guò)輸入該參數(shù)變量來(lái)反映三種駕駛風(fēng)格的差異。本模糊控制系統(tǒng)采用面積中心法作為清晰化規(guī)則,求出模糊集合函數(shù)曲線和橫坐標(biāo)包圍區(qū)域面積的中心,選擇這個(gè)中心對(duì)應(yīng)的橫坐標(biāo)值,作為這個(gè)模糊集合的代表值。
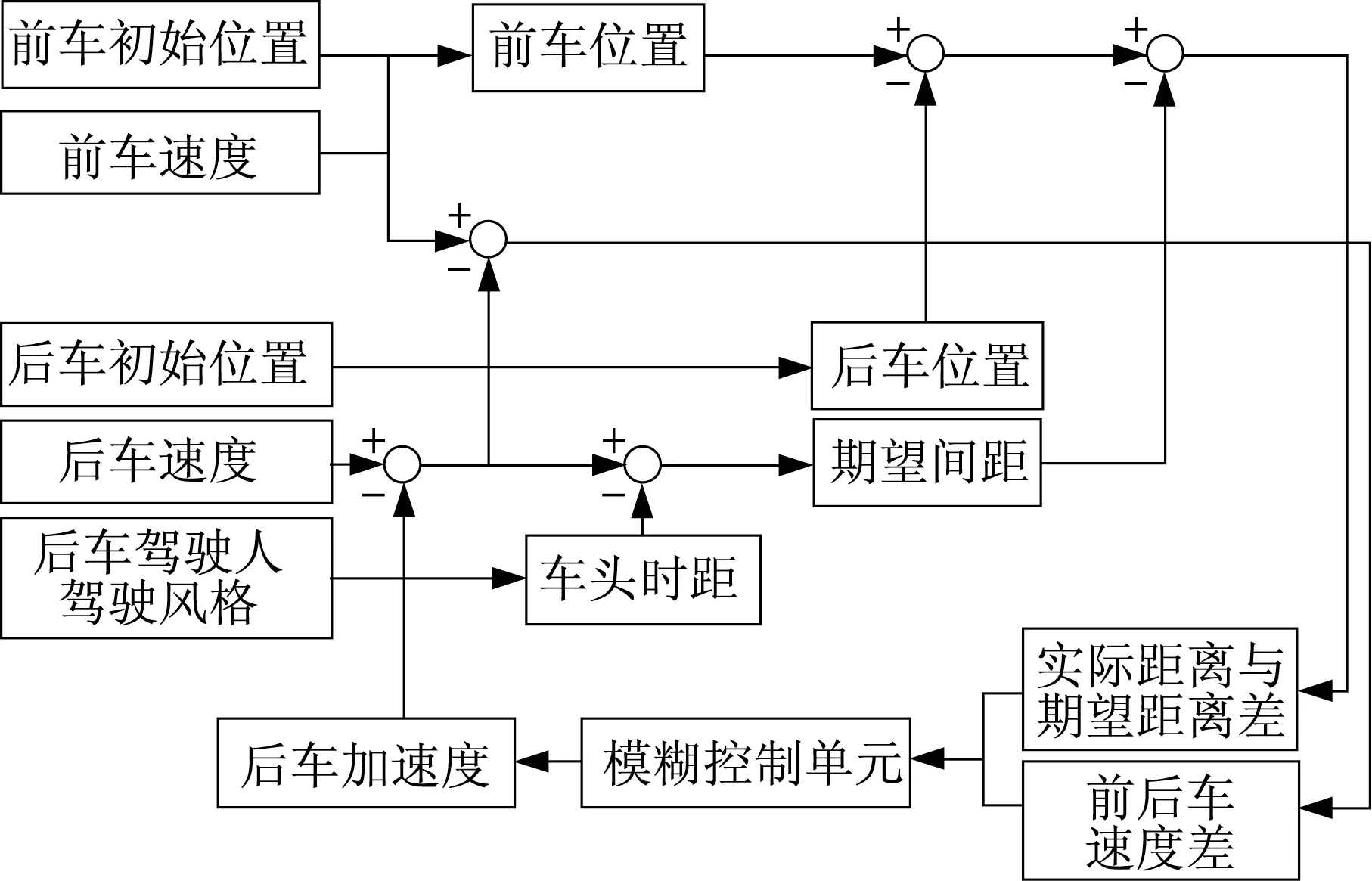
圖8 基于模糊控制的跟馳模型結(jié)構(gòu)Fig.8 Car-following model structure based on fuzzy control
3 Simulink數(shù)值分析
利用MATLAB 的Simulink 進(jìn)行數(shù)值分析,設(shè)置模糊控制系統(tǒng)過(guò)程,并根據(jù)模糊規(guī)則設(shè)置輸入、輸出參數(shù)隸屬度函數(shù),建立與對(duì)應(yīng)的跟馳模塊如圖9所示,模型計(jì)算步長(zhǎng)設(shè)為1 s。
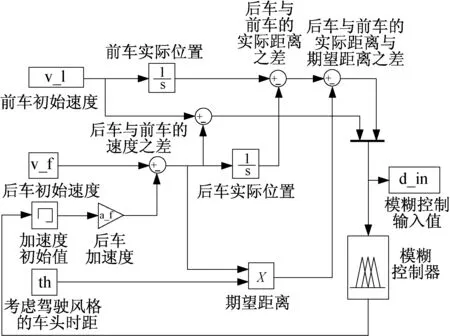
圖9 模糊控制系統(tǒng)Simulink模塊圖Fig.9 Simulink module diagram of fuzzy control system
輸入前車的速度和實(shí)際位置,后車的初始速度、位置和駕駛風(fēng)格,對(duì)于不同駕駛風(fēng)格,根據(jù)表3 判斷,得到不同的期望車頭時(shí)距,輸入對(duì)應(yīng)的參數(shù)。
在Simulink中分別得到三種類型駕駛風(fēng)格的位移-時(shí)間圖,如圖10~12所示,將模型得到的后車位移與真實(shí)數(shù)據(jù)進(jìn)行對(duì)比分析。同時(shí)分別得到三種類型駕駛風(fēng)格的速度-時(shí)間圖,如圖13~15所示,將模型得到的后車速度與真實(shí)數(shù)據(jù)進(jìn)行對(duì)比分析,并驗(yàn)證誤差情況。
根據(jù)平均絕對(duì)誤差(mean absolute error,MAE)和均方根誤差(root mean square error,RMSE)對(duì)模型進(jìn)行評(píng)價(jià),其指標(biāo)計(jì)算公式如下:
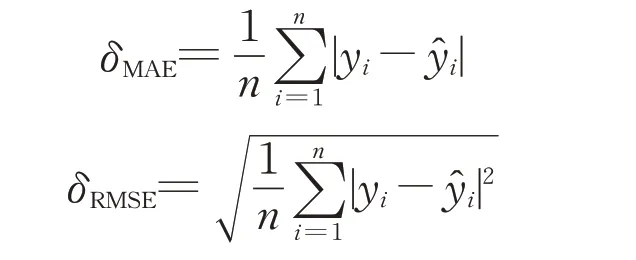
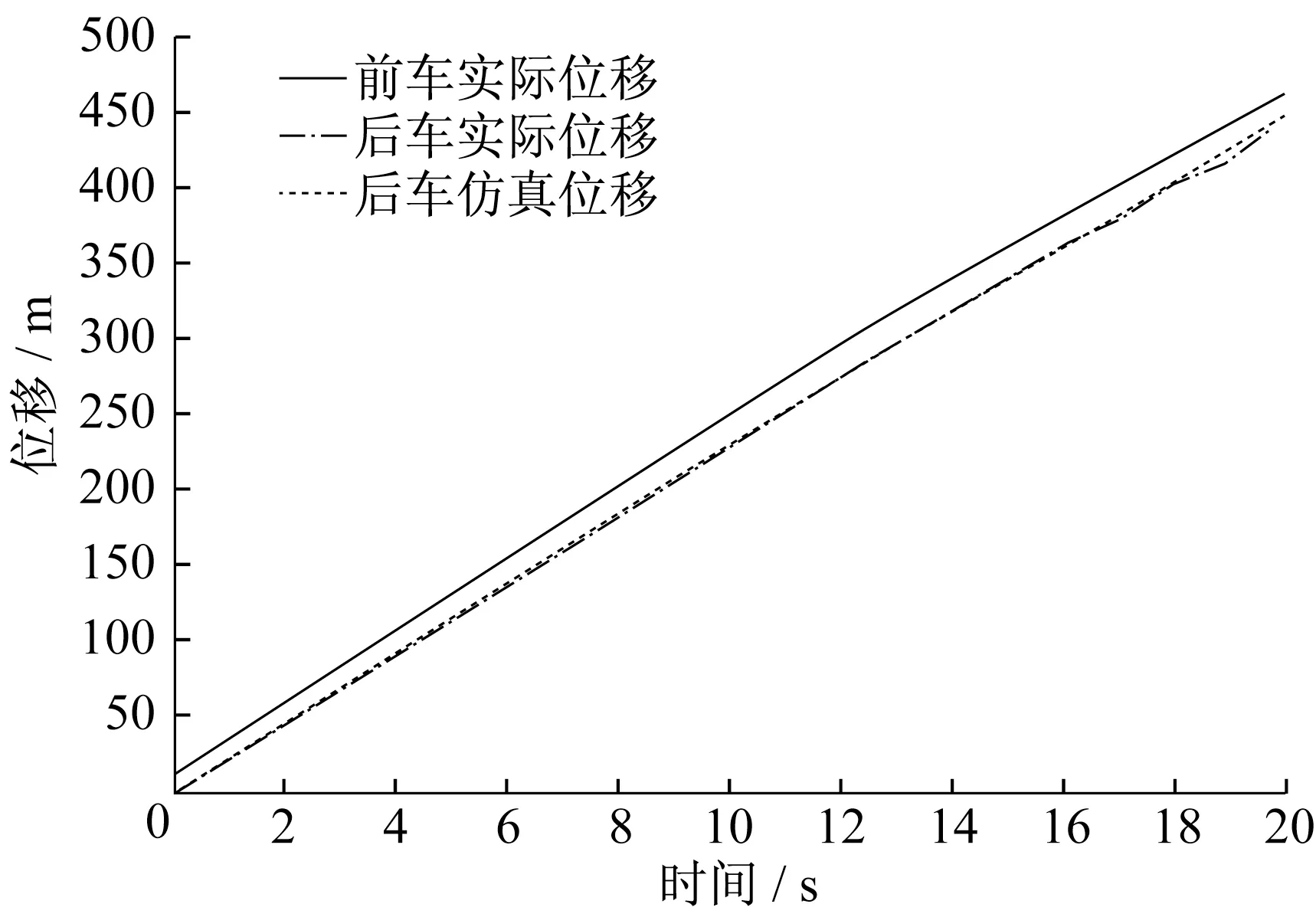
圖10 激進(jìn)型位移-時(shí)間關(guān)系Fig.10 Displacement-time relationship of angry driving style

圖11 普通型位移-時(shí)間關(guān)系Fig.11 Displacement-time relationship of normal driving style
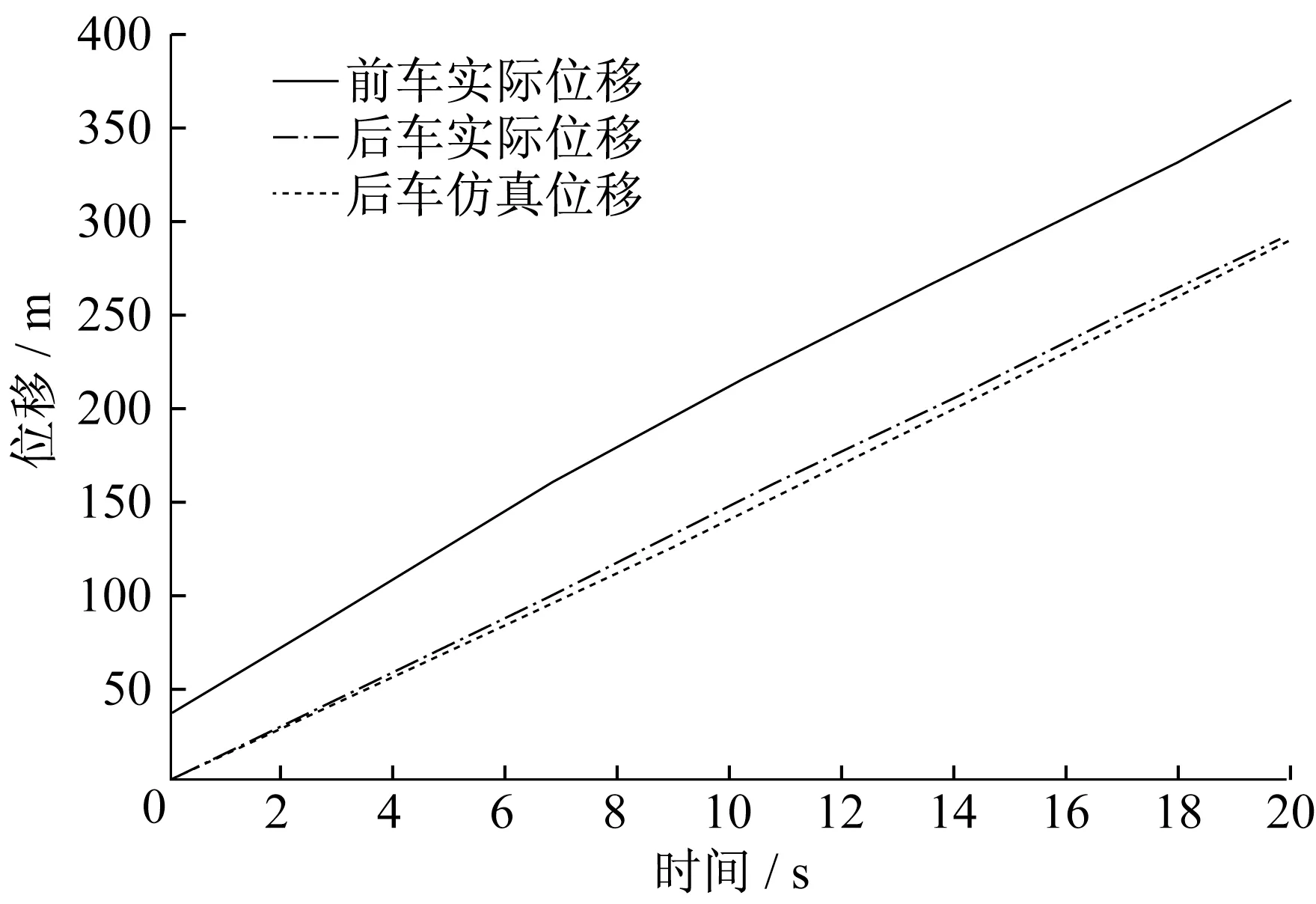
圖12 保守型位移-時(shí)間關(guān)系Fig.12 Displacement-time relationship of conservative driving style
式中:i為樣本編號(hào);n為樣本總量;yi為第i個(gè)樣本實(shí)際數(shù)據(jù)i為第i個(gè)樣本仿真數(shù)據(jù);
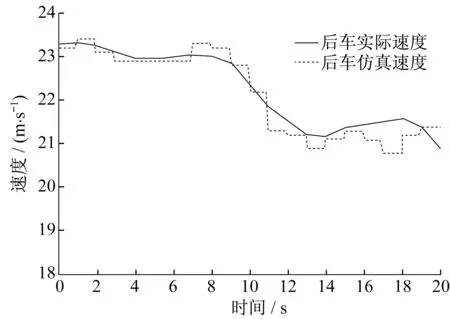
圖13 激進(jìn)型速度-時(shí)間關(guān)系Fig.13 Velocity-time relationship of angry driving style
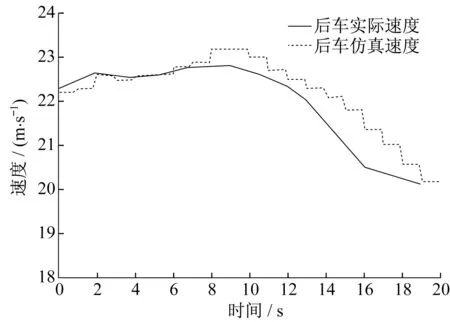
圖14 普通型速度-時(shí)間關(guān)系Fig.14 Velocity-time relationship of normal driving style
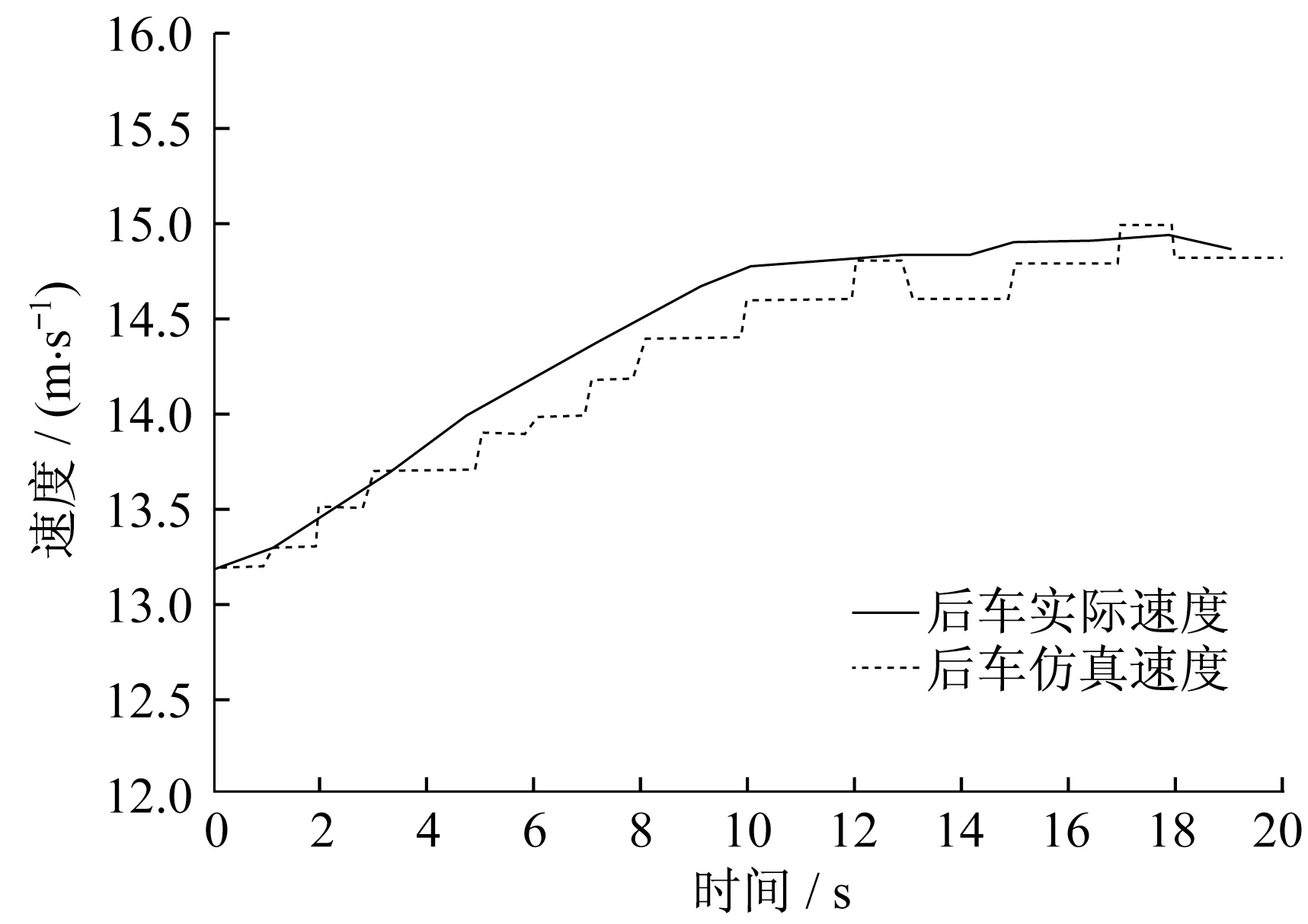
圖15 保守型速度-時(shí)間關(guān)系Fig.15 Velocity-time relationship of conservative driving style
對(duì)三類駕駛風(fēng)格的模型分別計(jì)算位移和速度的評(píng)價(jià)指標(biāo),結(jié)果見(jiàn)表5。
在不同出發(fā)間距、不同初始速度、不同駕駛風(fēng)格的情況下,后車的跟馳狀態(tài)不同,但模型的數(shù)值結(jié)果與自然駕駛實(shí)測(cè)的車輛軌跡相近,同時(shí)車速度變化較一致,數(shù)據(jù)的評(píng)價(jià)結(jié)果表示,模型的誤差較小,說(shuō)明本模型對(duì)于中國(guó)駕駛?cè)擞休^好的適用性。

表5 模型評(píng)價(jià)結(jié)果Tab.5 Model evaluation results
4 結(jié)語(yǔ)
現(xiàn)有的基于模糊控制的跟馳模型,大多假設(shè)駕駛?cè)诵袨榉绞较嗤蚴菍?duì)不同駕駛?cè)说男袨轱L(fēng)格進(jìn)行分類,未考慮過(guò)同一駕駛?cè)嗽诓煌瑺顟B(tài)下出現(xiàn)駕駛風(fēng)格的差異,且在劃分隸屬函數(shù)論域時(shí),缺乏自然駕駛數(shù)據(jù)的分析。
本文利用中國(guó)駕駛?cè)俗匀获{駛數(shù)據(jù),按駕駛風(fēng)格,對(duì)快速路自然駕駛跟馳片段的駕駛行為進(jìn)行分類。通過(guò)數(shù)據(jù)分析發(fā)現(xiàn),駕駛風(fēng)格對(duì)跟馳車頭時(shí)距的影響顯著,并可以擬合為三類駕駛風(fēng)格。在此基礎(chǔ)上,利用真實(shí)數(shù)據(jù)劃分輸入變量的論域,建立相應(yīng)的三角隸屬度函數(shù),對(duì)模糊控制規(guī)則表進(jìn)行調(diào)整優(yōu)化,建立了基于模糊控制的跟馳模型。通過(guò)驗(yàn)證與實(shí)際數(shù)據(jù)對(duì)比表明,該模型能夠準(zhǔn)確地描述不同駕駛風(fēng)格的駕駛?cè)烁Y過(guò)程。
由于自然駕駛數(shù)據(jù)樣本數(shù)量有限,后期可以增加更多的驗(yàn)證,同時(shí)由于各國(guó)駕駛風(fēng)格類型不同,若將該模型應(yīng)用于國(guó)外情況時(shí),需要進(jìn)一步深入研究。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19