離散力學(xué)與最優(yōu)控制理論在諧波減速器控制中的應(yīng)用研究
2020-06-20 06:24:20冮鐵強陳立杰
燃?xì)鉁u輪試驗與研究 2020年2期
陸 銓,冮鐵強,陳立杰
(廈門大學(xué)航空航天學(xué)院,福建廈門 361005)
1 引言
諧波減速器在航空航天領(lǐng)域有著廣泛的應(yīng)用,如何設(shè)計控制策略、解決諧波減速器內(nèi)部非線性干擾問題是其應(yīng)用中的一個難點。目前,諧波減速器的建模與控制研究主要基于連續(xù)時域。如Tuttle[1]研究了諧波減速器在摩擦損失、柔性阻尼等非線性特性影響下的細(xì)分模型。Han 等[2]設(shè)計了基于電機角位置和卡爾曼濾波器的角加速度估計器,采用改進(jìn)前饋補償控制器來補償非線性摩擦,但該控制器缺乏穩(wěn)定性證明。Ding[3]通過仿真發(fā)現(xiàn),線性滑模控制器在到達(dá)滑模面之前對摩擦干擾非常敏感,使用二次積分滑模面能在一定程度上提高控制器的魯棒性,但該控制器的性能指標(biāo)十分保守。可見連續(xù)時域下控制器的性能與穩(wěn)定性證明問題受制于系統(tǒng)模型的復(fù)雜度,而離散時域下的建模與控制能提供新的研究方向。
對于非線性系統(tǒng)的離散,傳統(tǒng)方法為局部線性化。如Maes[4]、Diao[5]等分別使用一階歐拉法和二階歐拉法計算了線性時變系統(tǒng)的傳遞函數(shù)矩陣,但這兩種方法需不斷重新計算系統(tǒng)的傳遞函數(shù)矩陣;Han 等[6]基于系統(tǒng)的局部傳遞函數(shù)矩陣設(shè)計了模型參考自適應(yīng)控制器,使用Popov 超穩(wěn)定性理論保證了控制器的穩(wěn)定性,但該算法對控制器的實時計算能力要求較高。上述離散控制研究均基于連續(xù)時間系統(tǒng)模型,離散精度與控制器性能均不理想。為此,本文將離散力學(xué)與最優(yōu)控制理論應(yīng)用于諧波減速器的控制研究,在不使用連續(xù)時間模型的前提下,考慮柔性關(guān)節(jié)與粘性摩擦,建立全時域離散模型,研究諧波減速器的最優(yōu)軌跡控制與最優(yōu)時間到達(dá)問題。
2 諧波減速器的離散時間建模
研究對象為一對由伺服電機和諧波減速器組合而成的串聯(lián)驅(qū)動系統(tǒng),其模型見圖1。該系統(tǒng)有兩個自由度,分別為諧波減速器的輸出軸轉(zhuǎn)角θl和電機轉(zhuǎn)子的輸出轉(zhuǎn)角θm;伺服電機通過轉(zhuǎn)子輸出扭矩u,諧波減速器的輸出端帶有負(fù)載。
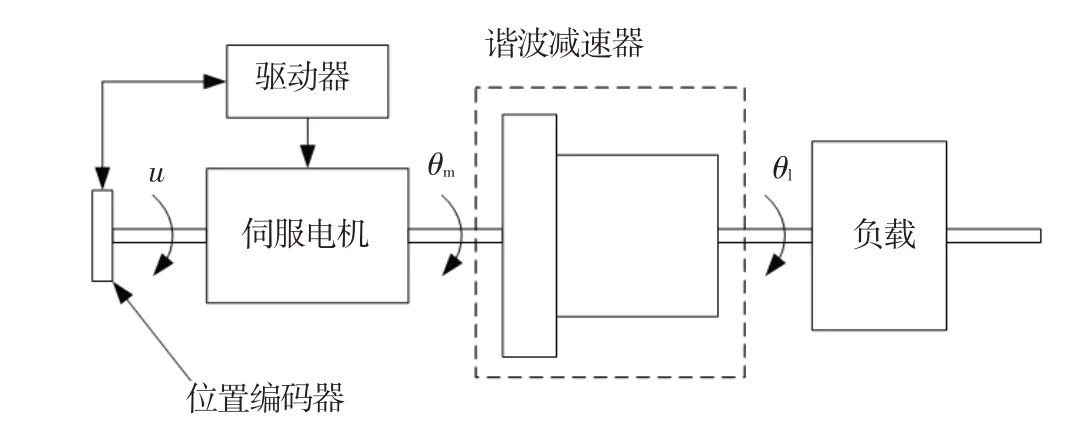
圖1 諧波減速器驅(qū)動系統(tǒng)模型簡圖Fig.1 Diagram of harmonic drive transmission system
為平衡計算效率與模型精度,本文所有的近似方法均選擇中點法。諧波減速器傳動系統(tǒng)的拉格朗日函數(shù)構(gòu)造為:

根據(jù)文獻(xiàn)[7]中的離散Lagrangian-d′Alembert原理,可得到任意時間區(qū)間[kh,(k+1) h]內(nèi)的等價離散拉格朗日函數(shù)為:
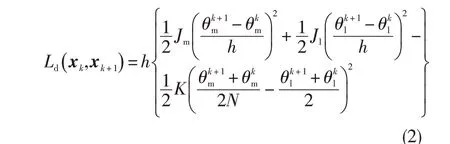
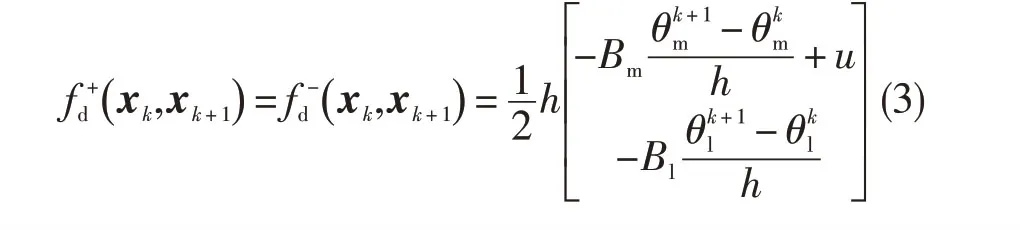
式中:Bm為伺服電機內(nèi)部的粘性摩擦系數(shù),Bl為諧波減速器內(nèi)部的粘性摩擦系數(shù)。
將式(2)、式(3)帶入文獻(xiàn)[6]中的離散拉格朗日方程,可得到用代數(shù)方程表示的諧波減速器離散模型:
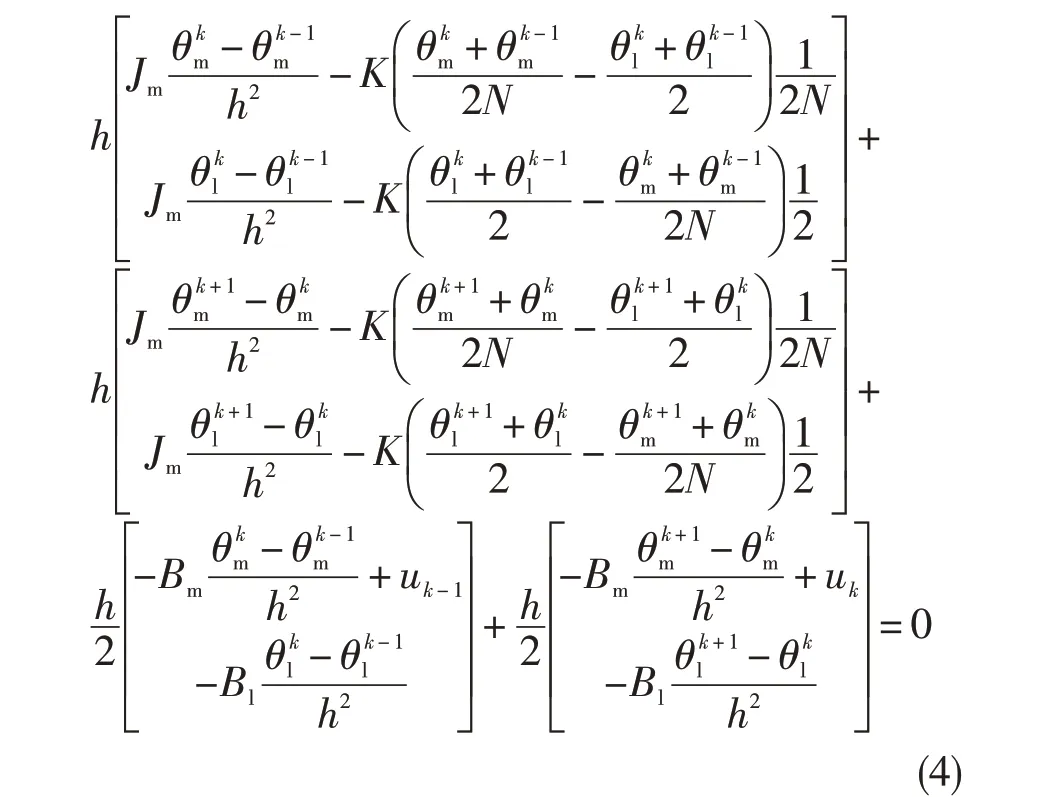
式中:k=1,2,3…,n-1。
初始點與終點的約束為:
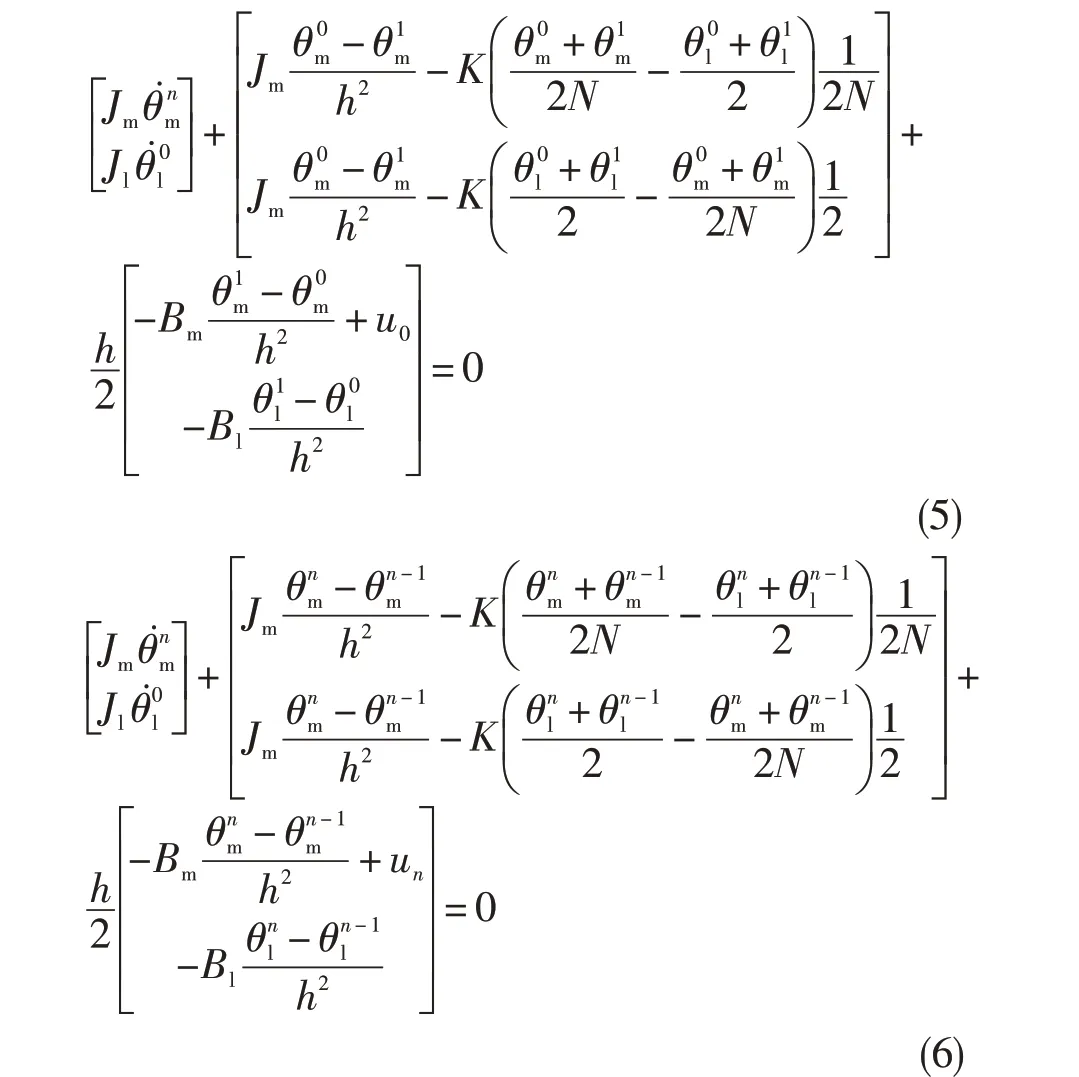
對于上述模型,根據(jù)具體控制任務(wù)的要求,可以確定系統(tǒng)的總運動時間為T,同時確定系統(tǒng)模型在t=0 時的初始狀態(tài)為,在t=T 時的末端狀態(tài)為。該模型的使用可以使多體動力系統(tǒng)控制任務(wù)的數(shù)學(xué)表述式更清晰與簡便。從離散模型的建立過程看,本文沒有使用經(jīng)典拉格朗日方程強行求解該系統(tǒng)的連續(xù)時間解析解;但是對于任意時間區(qū)間,該離散模型的形式仍然恒成立。同時,中間法的使用消除了離散模型中可能出現(xiàn)的導(dǎo)數(shù)形式,極大地降低了原連續(xù)時間模型的復(fù)雜程度。
3 諧波減速器的最優(yōu)控制
3.1 最優(yōu)跟蹤
最優(yōu)跟蹤問題是指設(shè)計控制率使得系統(tǒng)的實際輸出y(t)能夠跟蹤期望軌跡r(t),同時使指定的目標(biāo)函數(shù)取得極小值的過程。首先需要定義離散時間下最優(yōu)跟蹤問題的目標(biāo)函數(shù),常用的連續(xù)時間最優(yōu)跟蹤性能指標(biāo)為:

式中:M 和R 均為恒正的權(quán)重系數(shù)。
對上下限固定的積分號進(jìn)行等價離散,得到離散時間目標(biāo)函數(shù):
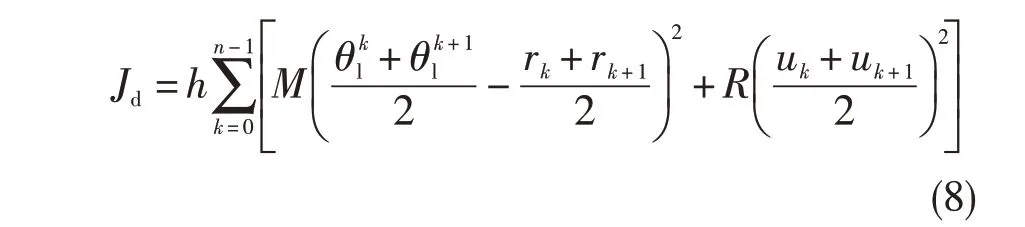
數(shù)值實驗發(fā)現(xiàn),減小R 或增大M,都可以增加被控系統(tǒng)的輸出精度。因此,將最優(yōu)跟蹤問題用下列公式描述:
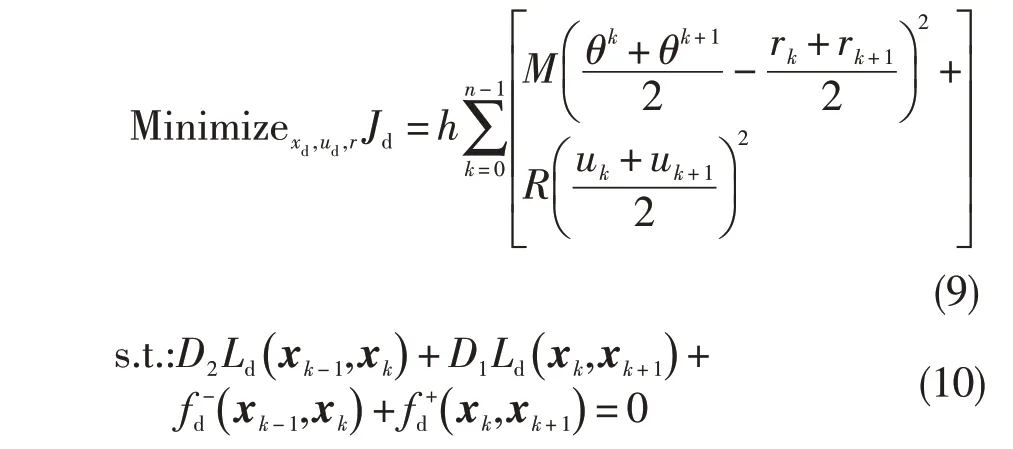
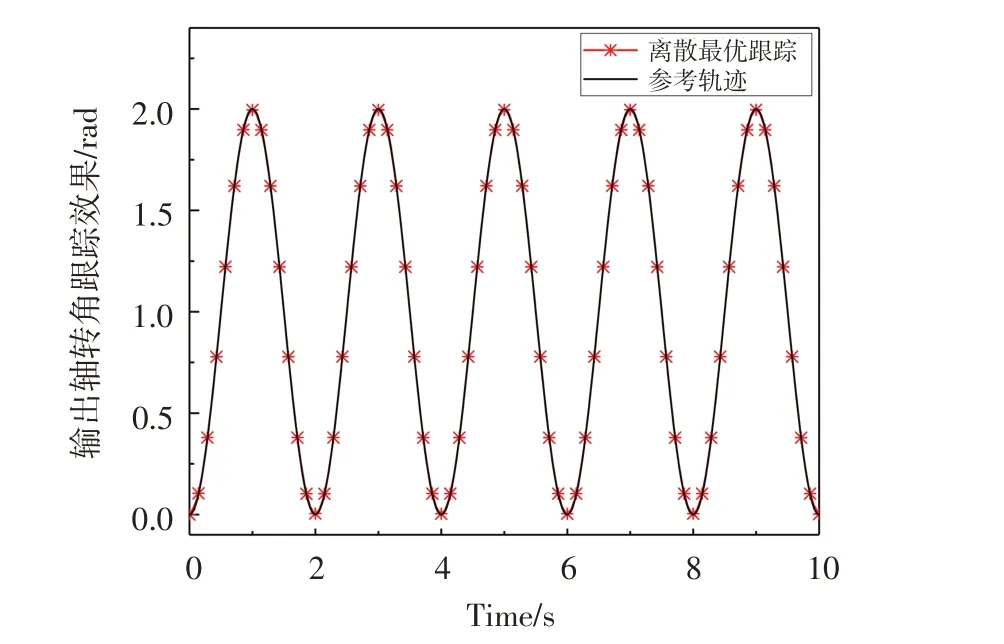
圖2 h=0.14 s時離散時間控制下的最優(yōu)跟蹤效果Fig.2 Optimal tracking effect under discrete-time control with h=0.14 s
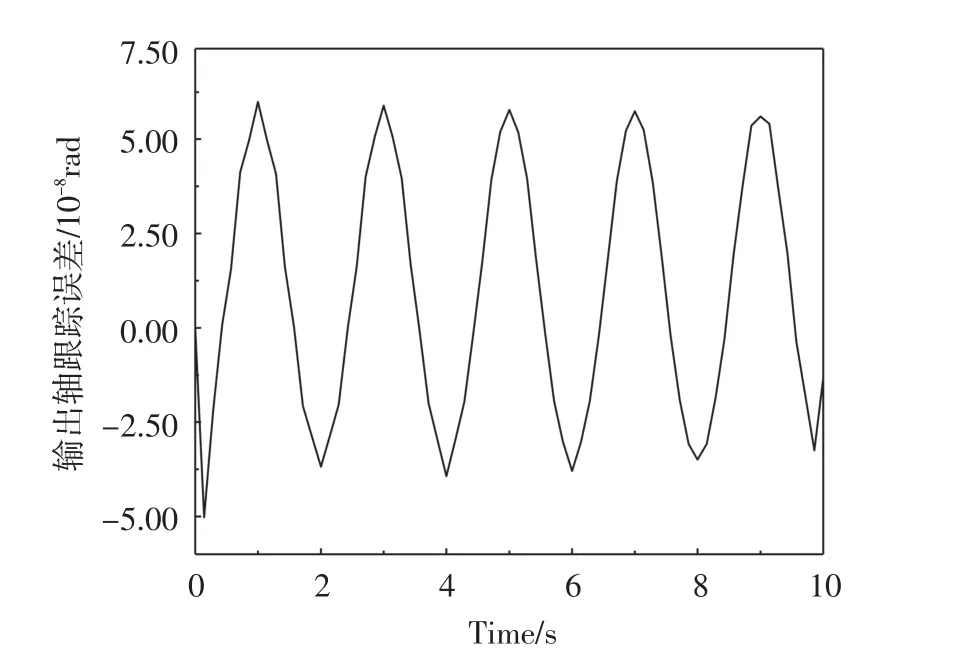
圖3 h=0.14 s時的最優(yōu)跟蹤誤差Fig.3 Optimal tracking error with h=0.14 s
3.2 時間最優(yōu)控制
使一個系統(tǒng)的性能指標(biāo)從初始狀態(tài)轉(zhuǎn)移到目標(biāo)集,用時最短的控制率稱之為時間最優(yōu)控制。Shareef等[9]在三角臂機器人上應(yīng)用了離散最優(yōu)控制方法,其機械臂在實現(xiàn)最短時間運動的同時還能在起點和終點處均保持零角速度,且離散最優(yōu)控制方法的求解耗時比相平面法[10]和動態(tài)規(guī)劃法[11]的短。

定義連續(xù)時間下最速到達(dá)問題的目標(biāo)函數(shù)為:式中:Tf為控制時域的長度,a 和b 均為正定的權(quán)重系數(shù)。
考慮到運動軌跡的光滑性與尋解難度,對上述目標(biāo)函數(shù)進(jìn)行等價離散,得:

從物理意義上看,式(12)依舊為對最速到達(dá)問題的數(shù)學(xué)描述,通過調(diào)整恒正的權(quán)重系數(shù)a、b 和c的大小,根據(jù)具體的控制任務(wù)在控制力矩和運動總時間之間權(quán)衡。對于起點與終點同時具有嚴(yán)格約束的最速到達(dá)問題,使用以下方程組進(jìn)行描述:
式中:n 為系統(tǒng)模型離散點的個數(shù)。
離散時間最優(yōu)控制所需的系統(tǒng)初始狀態(tài)為x0=[0,0,0,0]T,系統(tǒng)末端狀態(tài)為xn=[0,200π,0,4π]T,即諧波減速器從完全靜止開始旋轉(zhuǎn)兩圈,系統(tǒng)的初始速度和終點速度均為0;假設(shè)控制力矩的輸出飽和極限為±1 N·m。圖4為仿真得到的諧波減速器最速到達(dá)曲線。全運動時間約為5.6 s,整個運動過程分為三個階段,在起始點附近控制系統(tǒng)先使用較小的控制力矩保證平滑啟動,之后迅速切換到接近飽和輸出狀態(tài),使諧波減速器保持勻速運動,并在鄰近終點時利用一個反向力矩減速,保證到達(dá)速度為0。圖5示出了輸入軸力矩信號隨時間變化的過程。可看出離散控制方法對這三個階段的時間規(guī)劃,其中諧波減速器的零速度平滑啟動與終點處的零速度平穩(wěn)到達(dá)均使用了很短的調(diào)整過程,同時控制信號在整個控制時域中的極值均限制在了±1 N·m以內(nèi)。
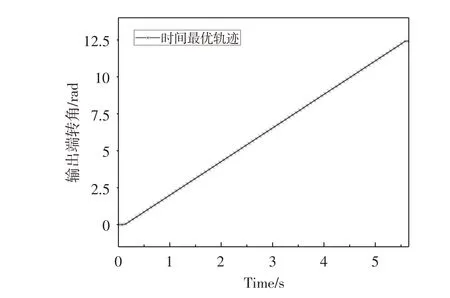
圖4 諧波減速器最速到達(dá)曲線Fig.4 Time shortest curve of harmonic drive
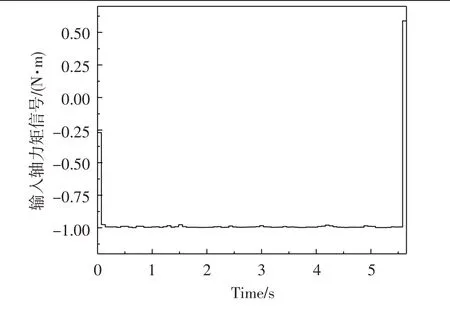
圖5 控制力矩信號隨時間變化曲線Fig.5 Control torque signals curve with time domain
4 結(jié)論
對離散時域下諧波減速器的建模與控制進(jìn)行了研究,結(jié)論如下:
(1) 考慮諧波減速器固有的柔性關(guān)節(jié)與粘性摩擦特性,在不使用原連續(xù)系統(tǒng)模型的前提下建立了全時域離散模型,且該模型代數(shù)方程組的表達(dá)形式大大降低了系統(tǒng)的復(fù)雜度。
(2) 在離散模型的基礎(chǔ)上實現(xiàn)了諧波減速器在離散時域下對于復(fù)雜軌跡的跟蹤能力,且控制系統(tǒng)的調(diào)整階段明顯縮短,在全控制時域基本實現(xiàn)了10-8rad量級的跟蹤誤差。
(3) 對于起始點與終點均具有運動約束的控制任務(wù),離散時間控制通過對不同運動狀態(tài)的時間規(guī)劃,在控制力矩具有輸出極限的條件下實現(xiàn)了諧波減速器的最短時間控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19