車載集裝箱翻轉裝置的設計與分析
2020-06-29 03:02:58劉浩然朱京明
重型機械 2020年4期
關鍵詞:動作
劉浩然,朱京明
(1.西南大學含弘學院,重慶 400715;2. 五邑大學智能制造學部, 廣東 江門 529030;3.山東交通學院工程機械學院,山東 濟南 250023)
0 前言
集裝箱運輸于20世紀中葉出現,隨著全球經濟的發展、世界各國貿易量的增加而逐漸發展,在經過了半個多世紀的發展后,集裝箱運輸成為了覆蓋全球最廣且最重要的運輸方式之一[1]。 在集裝箱裝載散貨時,為了提升效率一般要把集裝箱豎直立起,并通過輸送帶將散貨運輸到集裝箱中。要實現集裝箱的翻轉,傳統上,需要先通過起重裝置將集裝箱從運輸車輛上卸下并放置在翻轉裝置上進行固定在進行相應的翻轉作業[2]。
美國的Bushman公司是世界上生產種類最豐富的翻轉裝置,主要有CL型、L型以及其他可以依據操作對象定制的翻轉裝置[3]。美國Life Product公司研制的L型翻轉裝置,主要應用于小型設備的翻轉,更在液壓式翻轉裝置的基礎上研發了電力驅動式、可移動式等多種翻轉裝置[4]。國內翻轉裝置的起步較晚,研發及其制造方面與國外的先進水平存在一定的差異,凱峰集團研發的多種類型集裝箱專用翻轉機在行業內處于領先水平[5]。
1 集裝箱翻轉裝置的結構設計
基于可控機構[6-12]相關原理設計的集裝箱翻轉裝置是典型的平面五桿機構,機構簡圖如圖1所示。集裝箱翻轉裝置的基本組成包括底座、機架、主動桿、從動桿1、從動桿2、滑塊等。該機構在工作時的主要動作分為翻轉動作和復位動作。翻轉動作的工作原理:主動桿順時針旋轉,滑塊配合主動桿的動作向遠離主動桿的方向滑動,待到主動桿以及從動桿1皆到達操作所要求的位置時所有構件停止運動,完成翻轉動作;復位動作的工作原理:主動桿逆時針旋轉,滑塊配合主動桿的動作向靠近主動桿的方向滑動,待到各構件回復到原來位置時動作停止,完成復位動作。
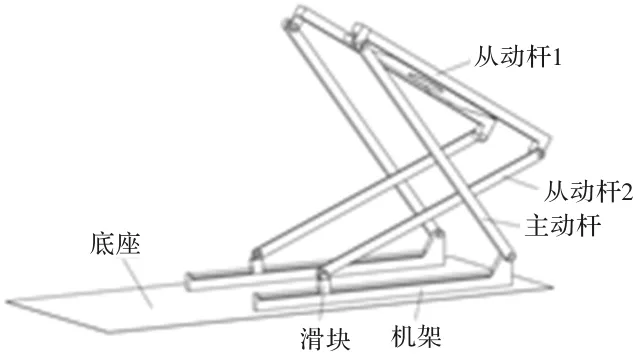
圖1 集裝箱翻轉裝置機構簡圖
2 集裝箱翻轉裝置的力學分析
2.1 機構力學的簡化
集裝箱翻轉裝置在工作時各構件的運動速度較小、速度的變化也較小,因而在進行靜力學計算時可以忽略結構本身的慣性力和轉動慣量;而此機構主要為鋼結構,各構件自身的重力較大,因此在進行靜力學計算時結構本身的重力不可忽略。在此機械結構中,各鉸孔的摩擦力與各構件所受的其他力相比遠小于其他力,因此在受力分析中將忽略各鉸孔的摩擦力。集裝箱翻轉裝置的受力情況如圖2所示,并根據此機構的工作特點、結構情況進行力學簡化,各構件受力分析如圖3所示。
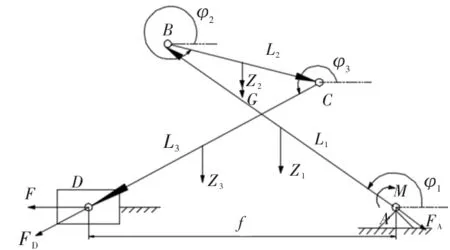
圖2 機構受力分析
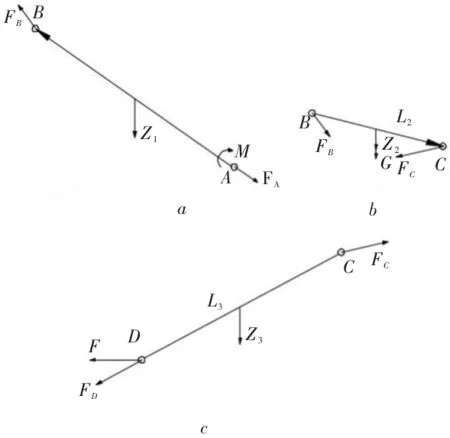
圖3 機構受力分析
2.2 剛體動力學求解
根據圖3,利用達朗貝爾原理建立該翻轉機構動態靜力學簡化模型用式(1)表示。
(1)
將式(1)整理成矩陣形式,即
[A][B]=[C]
(2)
式中,
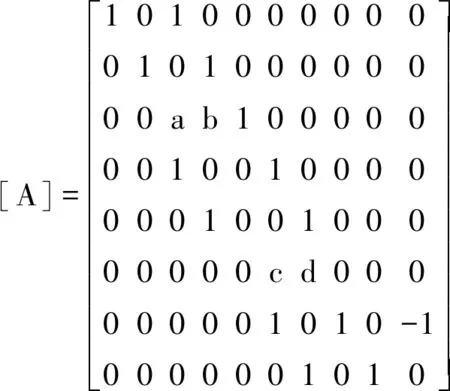
[B]=[FAx FAy FBx FBy M FCx FCy FDx FDy F]T

將式(2)兩邊同時左乘[A]-1,就可以得到[B],即作用在各鉸點的約束反力、主動桿L1的驅動轉矩M和滑塊的驅動力F的解:
[B]=[A]-1[C]
(3)
通過上式即可求得翻轉機構各鉸點的鉸點力及驅動力,為翻轉機構進一步功率預估打下基礎。
3 集裝箱翻轉裝置運動學仿真
3.1 位姿仿真
建立該種集裝箱翻轉裝置三維模型,并進行運動學仿真,集裝箱翻轉裝置的初始位姿如圖4所示,經過一系列的運動完成翻轉動作如圖5所示。
要實現圖4到圖5的動作可以通過兩種工作方式。第一種工作方式:主動桿L1先進行逆時針轉動,同時滑塊向靠近A點的位置緩慢滑動,此時,兩主動件所配合完成的動作將使翻轉架以及集裝箱做提升運動,待到主動桿L1到達指定位置,主動桿L1鎖閉不動,此時滑塊再向遠離A點的位置進行滑動,此時翻轉架連同集裝箱進行翻轉動作,待到指定位置滑塊停止運動并鎖閉,回轉過程為該工作過程的逆過程;第二種工作方式:主動桿L1和滑塊同時動作,主動桿逆時針旋轉,同時滑塊向遠離A點的方向運動;回轉過程為該過程的逆過程。
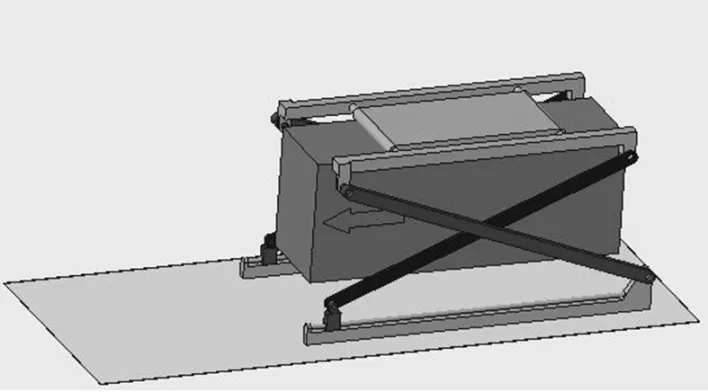
圖4 機構初始位姿

圖5 機構工作姿態
對于第一種工作方式,設定輸入參數,主動桿繞A點逆時針作勻速圓周運動速度為1.5 Deg/s;滑塊作勻速直線運動初速度為10 mm/s,在第40 s時滑塊速度變為-25 mm/s一直到運動結束。在第二種工作方式中,設定輸入參數,主動桿繞A點逆時針作勻速圓周運動速度為1.5 Deg/s;滑塊作勻速直線運動速度為-20 mm/s。設定好輸入參數后,開始進行機構位置的仿真分析。
在實際工程應用中,可以通過B、C兩點的位置來確定集裝箱翻轉的角度以及位置,因此在仿真中導出了B、C兩點的位置變化曲線,以此來研究集裝箱在翻轉過程中動作的特點。
圖6、圖7分別是兩種工作方式中B、C點的位置變化曲線。
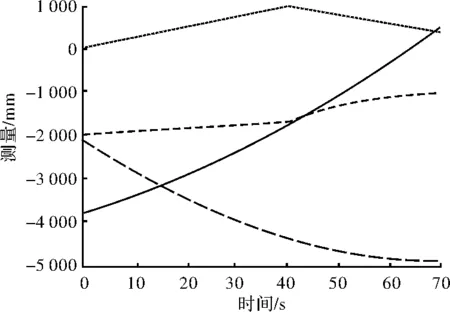
圖6 第一種工作方式中B、C點位置曲線
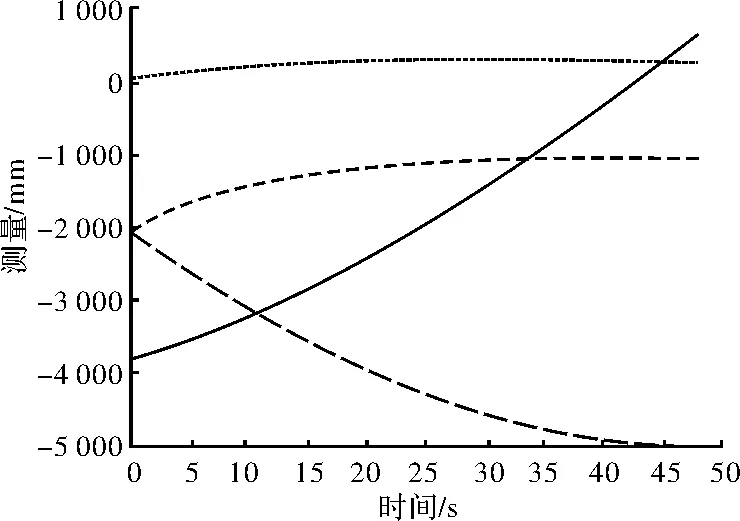
圖7 第二種工作方式中B、C點位置曲線
3.2 兩種工作方式的分析與對比
對于第一種工作方式,滑塊推動桿L3先向A點做直線運動,在到達指定位置后又開始做方向相反的直線運動。這種運動方式可以改善主動桿L1的受力情況,降低主動桿的負載,但是當滑塊的運動方向由指向A點變為相反的方向時,在滑塊速度方向變化的一瞬間,滑塊的加速度是一個比較大,此時根據牛頓第二定律F=m·a,則滑塊所受力F也比較大,滑塊將受到一定的沖擊會使機械結構產生一定的損壞。
對于第二種工作方式,滑塊與主動桿L1同時運動,且滑塊以低速運動,可以有效地防止慣性力的沖擊,但在運動中會使主動桿的負載增大,對主動桿的強度有很大要求。
在圖7中,時刻為40 s時,C點位置的X分量和Y分量的曲線皆出現“尖頂”,C點位置的X分量曲線的斜率由大于0變為小于0,說明此時C點速度的X分量由正方向變為相反方向,C點位置的Y分量的斜率突然變大,說明此時C點速度的Y分量突然變大。由此也可得出上述第一種工作方式的缺點,即滑塊在運動中會受到一定的沖擊。
由于本文中所研究的機構是低速度、高負載,所以當采用第二種工作方式時可以減少機械結構額外的負載降低沖擊對機構的損壞,由此建議該機構采用第二種工作方式為宜。
4 結論
本文對車載集裝箱翻轉裝置進行了剛體動力學建模和運動學仿真分析,分析結果驗證了該裝置可以完成集裝箱的翻轉以及再回轉到原始位置等一系列運動。證明了該翻轉裝置的可行性,能有效地降低車載集裝箱翻轉作業周期,提高翻轉作業效率,減少人力物力的浪費并相應地減輕工人的勞動強度。
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27
