立式捏合機(jī)攪拌槳尖混沌運(yùn)動的可視化試驗(yàn)研究
2020-06-30 14:10:00張嘉琪樊睿辰
固體火箭技術(shù) 2020年2期
關(guān)鍵詞:實(shí)驗(yàn)
張嘉琪,孟 洋,沈 凱,樊睿辰
(中國核動力研究設(shè)計(jì)院,成都 610041)
0 引言
雙軸差速立式捏合機(jī)是固體推進(jìn)劑藥漿生產(chǎn)的關(guān)鍵設(shè)備,其混合作用的優(yōu)劣將直接影響固體推進(jìn)劑藥漿的質(zhì)量[1]。據(jù)現(xiàn)有捏合機(jī)設(shè)備混合機(jī)理的研究,表明混合釜流場為層流流場,流體具有流線不變性、時變性較差、粒子運(yùn)動軌線不相交等特點(diǎn)。在工程中,常用雙軸行星運(yùn)動攪拌槳對固體推進(jìn)劑藥漿進(jìn)行攪拌混合[2]。
國內(nèi)外有部分學(xué)者對捏合機(jī)混合機(jī)理做出了研究,研究結(jié)果表明,雙軸行星運(yùn)動攪拌槳槳尖的運(yùn)動軌跡具備混沌運(yùn)動的特征,并且混沌運(yùn)動是促進(jìn)藥漿混合的關(guān)鍵因素。但是,受制于固體推進(jìn)劑藥漿的易燃易爆性,在混合工藝過程中,只能通過捏合機(jī)混合釜的泄爆罩窗口觀察藥漿混合過程,對藥漿混合過程中混沌作用的產(chǎn)生以及影響尚缺乏足夠認(rèn)識。
本文將針對雙軸行星運(yùn)動攪拌槳槳尖的運(yùn)動軌跡進(jìn)行分析,研究其在層流混合系統(tǒng)中的混沌行為,即遍歷性、分叉與混沌表征,并通過流場示蹤試驗(yàn)進(jìn)行了驗(yàn)證分析。
1 雙軸行星運(yùn)動攪拌槳槳尖遍歷特性
在層流混合系統(tǒng)中,由于混合流場內(nèi)的流體受控于線性粘性力,流線保持不變,其時變性較差,粒子的運(yùn)動軌線不相交,很難達(dá)到較優(yōu)的混合效果[3]。根據(jù)Reynolds的研究成果,有效的層流混合是由于流體被反復(fù)的拉伸和折疊[4]。
在非線性動力學(xué)的研究領(lǐng)域內(nèi),示蹤劑在流場區(qū)域反復(fù)拉伸和折疊的過程可通過Smale馬蹄映射進(jìn)行描述,拉伸和折疊過程使得示蹤劑具有局部發(fā)散而整體在流場區(qū)域有界的特性,即Smale馬蹄意義下的混沌[5]。流體混合需要物質(zhì)線和面的充分拉伸和折疊,在兩種流體需要充分混合而所需的能量要盡可能小的情況下,混沌則非常有效[6]。
*L雙軸立式差速立式捏合機(jī)混合釜模型如圖1所示。混合釜直徑D=130 mm、高度H=108 mm,有效容積為*L。遠(yuǎn)心槳中心點(diǎn)為Ok,遠(yuǎn)心槳直徑Dk=64 mm,遠(yuǎn)心槳螺旋角θk=π/4,偏心距為ek=29.5 mm;近心槳中心點(diǎn)為Os,近心槳直徑Ds=64 mm,近心槳螺旋角θs=π/2.838,偏心距為es=14.75 mm;遠(yuǎn)心槳轉(zhuǎn)速為ωk,近心槳轉(zhuǎn)速為ωs,公轉(zhuǎn)轉(zhuǎn)速為ωH。設(shè)定遠(yuǎn)心槳和公轉(zhuǎn)順時針旋轉(zhuǎn)、近心槳逆時針旋轉(zhuǎn)時為正轉(zhuǎn),遠(yuǎn)心槳和公轉(zhuǎn)逆時針旋轉(zhuǎn)、近心槳順時針旋轉(zhuǎn)時為反轉(zhuǎn),遠(yuǎn)心槳轉(zhuǎn)速、近心槳轉(zhuǎn)速與公轉(zhuǎn)轉(zhuǎn)速的比例為:ωk=-2ωs=9.37ωH。同時,將迎向槳葉自轉(zhuǎn)方向的槳葉曲面定義為迎料面,遠(yuǎn)離槳葉自轉(zhuǎn)方向的槳葉曲面定義為背料面。遠(yuǎn)心槳槳尖距近心槳最小距離為c1=2 mm,距實(shí)驗(yàn)容器側(cè)壁距離為c2=2 mm,距實(shí)驗(yàn)容器底面距離為c3=2 mm。
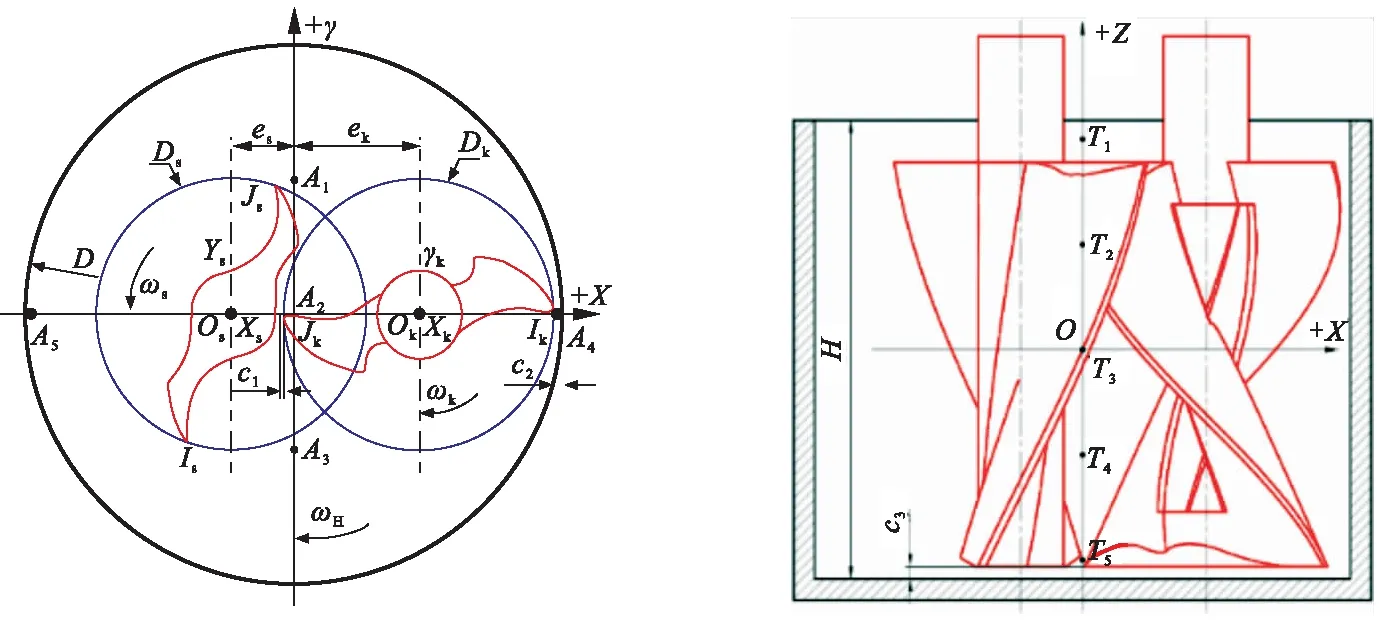
(a)Top view (b)Front view
遠(yuǎn)心槳、近心槳槳葉的三維數(shù)學(xué)模型分別為
(1)
式中ζ為遠(yuǎn)心槳或近心槳軸向投影的旋轉(zhuǎn)角;θ為遠(yuǎn)心槳或近心槳的螺旋角[7]。
遠(yuǎn)心槳與近心槳既有自轉(zhuǎn)又有公轉(zhuǎn),在實(shí)驗(yàn)容器徑向截面中,依據(jù)相對運(yùn)動原理建立笛卡爾直角坐標(biāo)系XOY、XkOkYk、XsOsYs,遠(yuǎn)心槳槳葉槳尖Ik、Jk運(yùn)動方程如下:
(2)
(3)
近心槳槳葉槳尖Is、Js運(yùn)動方程如下:
(4)
(5)
當(dāng)ωk=20 rpm,t=30 s時,遠(yuǎn)心槳槳尖Ik的運(yùn)動軌跡如圖2(a)所示,近心槳槳尖Is的運(yùn)動軌跡如圖2 (b)所示。
當(dāng)ωk=20 rpm時,遠(yuǎn)心槳槳尖Ik、Jk與近心槳槳尖Is、Js在混合釜的運(yùn)動軌跡見圖3。可見,在時間t足夠大的情況下,遠(yuǎn)心槳近心槳槳尖的運(yùn)動軌跡可以遍歷至整個混合釜平面位置。因此,可稱雙軸差速立式捏合機(jī)混合釜模型是遍歷的。
2 混合釜模型Poincaré截面
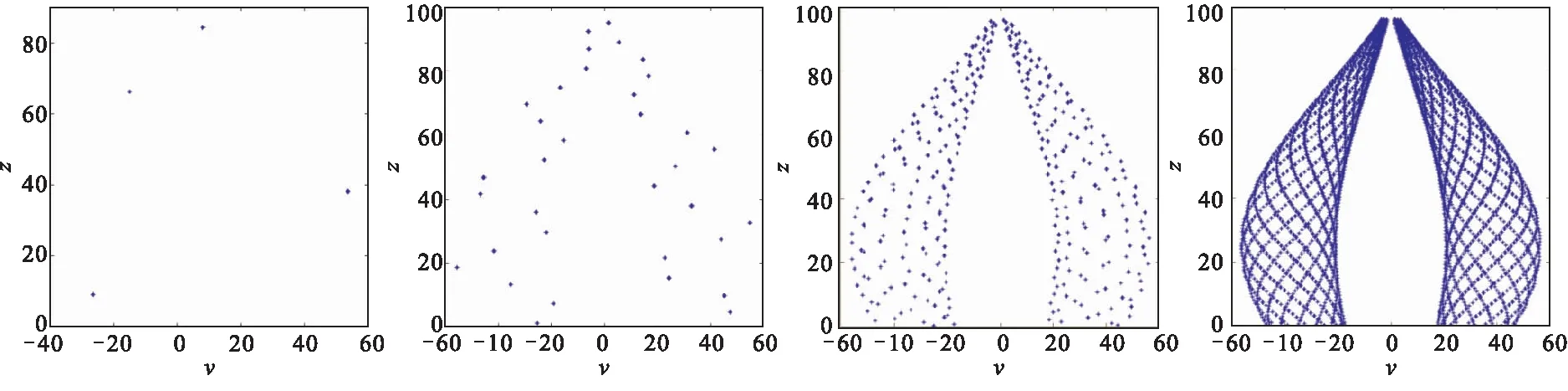
結(jié)合式(1)、式(2)與式(3),截取u=0截面,當(dāng)ωk=20 rpm時,遠(yuǎn)心槳槳尖運(yùn)動軌跡Poincaré截面見圖4。結(jié)合式(1)、式(4)與式(5),截取u=0截面,當(dāng)ωk=20 rpm時,近心槳槳尖運(yùn)動軌跡Poincaré截面見圖5。
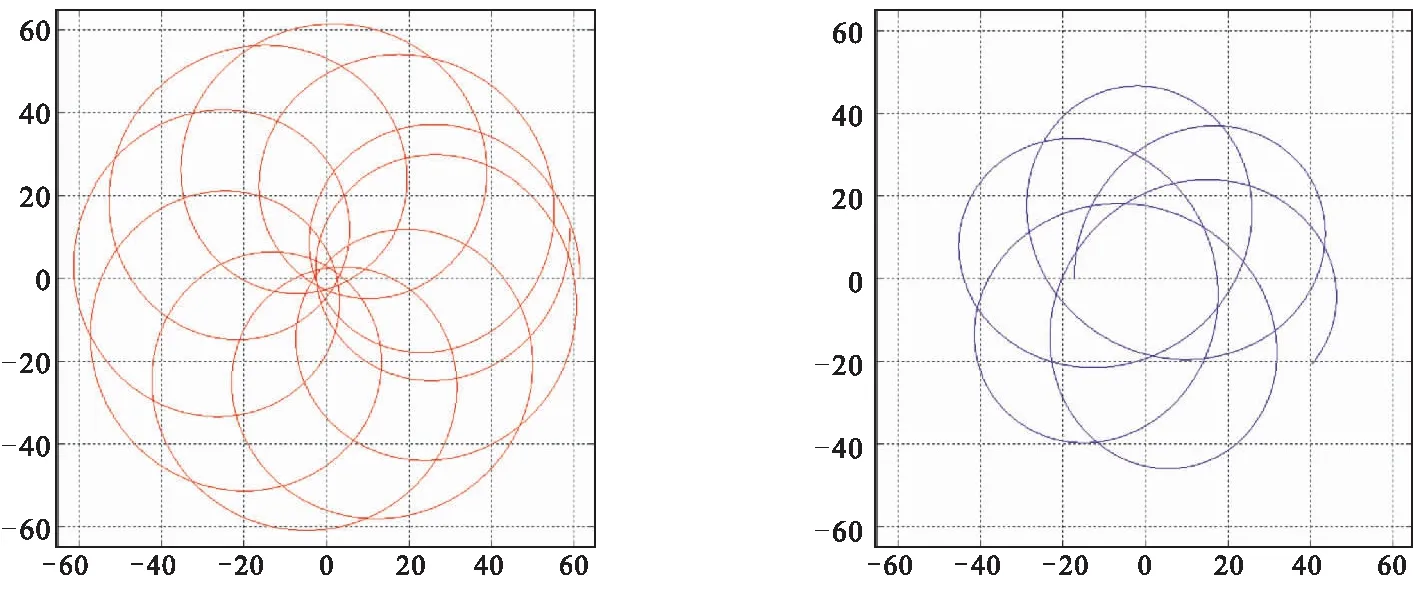
(a)Trajectory of the telecentric propeller tip Ik (b)Trajectory of the proximal propeller tip Is
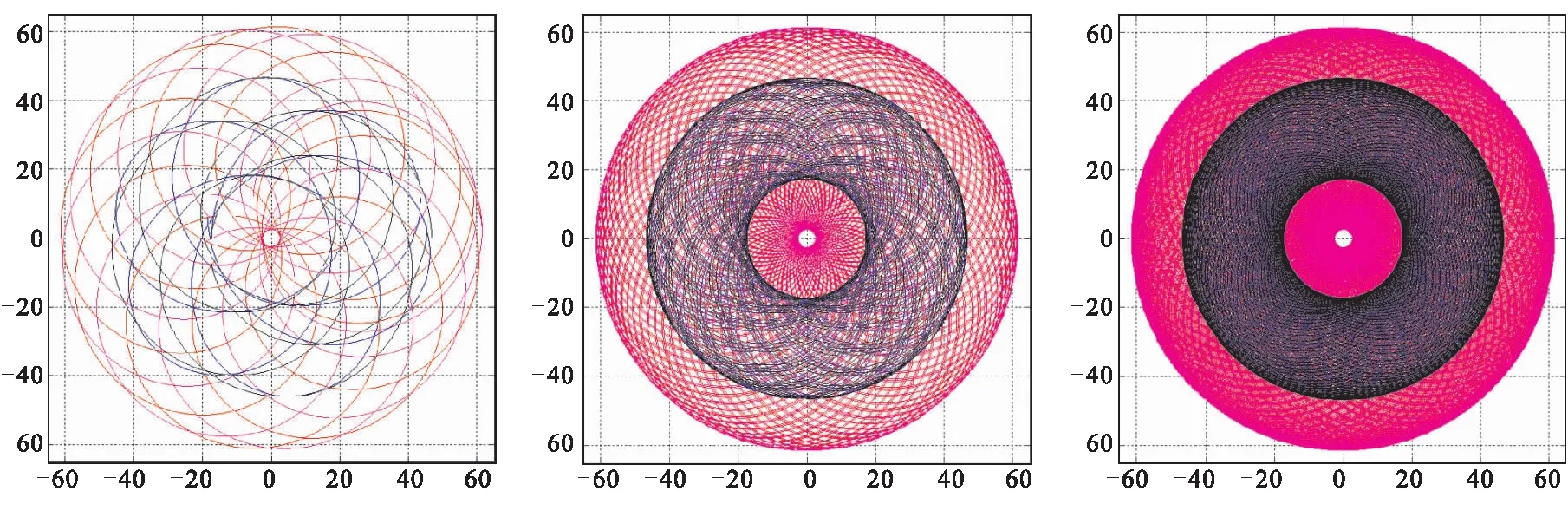
(a)t=30 s (b)t=300 s (c)t=1000 s
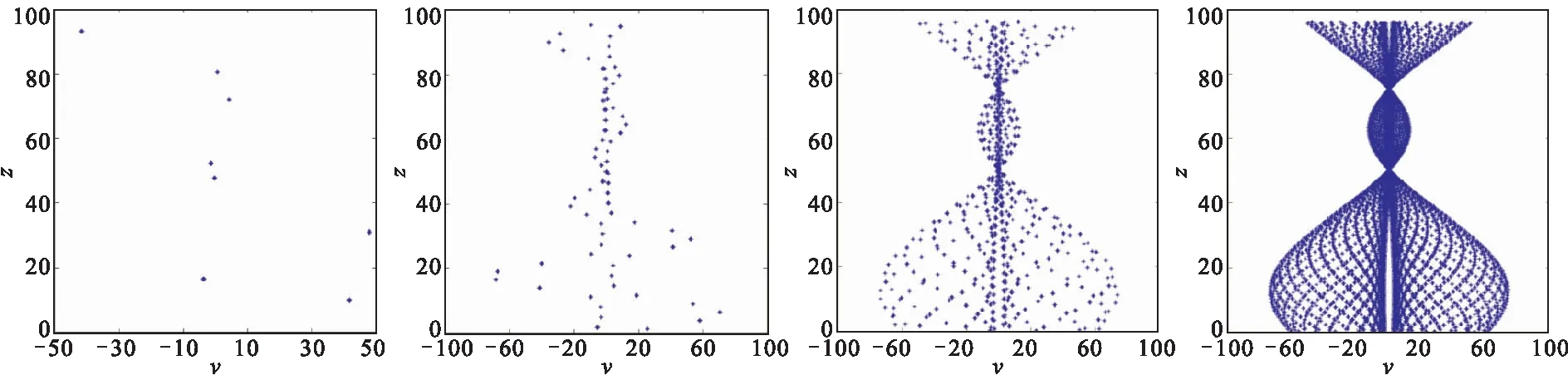
(a)t=10 s (b)t=20 s (c)t=200 s (d)t=5000 s
(a)t=10 s (b)t=20 s (c)t=200 s (d)t=5000 s
分析圖4、圖5可知,隨著時間t的增加,遠(yuǎn)心槳與近心槳槳尖運(yùn)動軌跡Poincaré截面圖內(nèi)的離散點(diǎn)集中在某些特定區(qū)域,并不隨時間t的增加而發(fā)生逃逸特定區(qū)域的狀況,由此說明遠(yuǎn)心槳與近心槳槳尖的運(yùn)動最終實(shí)現(xiàn)混沌運(yùn)動。
根據(jù)Devaney對混沌的定義,混沌運(yùn)動的本質(zhì)特征是系統(tǒng)長期行為對初值的敏感依賴性。動力學(xué)系統(tǒng)的行為取決于兩個因素:一個是系統(tǒng)的運(yùn)行演化規(guī)律,在數(shù)學(xué)上表現(xiàn)為動力學(xué)方程;另一個是系統(tǒng)現(xiàn)在的狀態(tài),在數(shù)學(xué)上稱為初始條件[8]。處于混沌狀態(tài)的系統(tǒng),運(yùn)動軌道將敏感地依賴于初始條件。從兩個及其鄰近的初值出發(fā)的兩條軌道,在短時間內(nèi)似乎差距不大,但在足夠長的時間以后,必然呈現(xiàn)出顯著的差異。從長期行為看,初值的小改變在運(yùn)動過程中不斷被放大,導(dǎo)致軌道發(fā)生巨大偏差,即系統(tǒng)長期行為對初值的敏感依賴性[9]。
判斷系統(tǒng)是否處于混沌運(yùn)動可根據(jù)Poincaré截面法的定義:在多位相空間中適當(dāng)選取一截面,在此截面上的某一對共軛變量取固定值作為Poincaré截面。觀察運(yùn)動軌跡Poincaré截面的交點(diǎn),當(dāng)Poincaré截面上只有一個不動點(diǎn)或少數(shù)離散點(diǎn)時,運(yùn)動是周期運(yùn)動;當(dāng)Poincaré截面上是一封閉曲線時,運(yùn)動是準(zhǔn)周期運(yùn)動;當(dāng)Poincaré截面上是一些成片的密集點(diǎn)時,則為混沌運(yùn)動。
對于雙軸差速立式捏合機(jī)的遠(yuǎn)心槳與近心槳,其運(yùn)動方式由自轉(zhuǎn)和公轉(zhuǎn)共同組成,槳葉槳尖在自轉(zhuǎn)運(yùn)動中做圓周運(yùn)動,公轉(zhuǎn)運(yùn)動的存在將形成對槳尖運(yùn)動軌跡的干擾,經(jīng)過足夠長的時間,槳尖運(yùn)動最終實(shí)現(xiàn)混沌運(yùn)動。為證明這一論點(diǎn),排除槳葉的公轉(zhuǎn)運(yùn)動,考察遠(yuǎn)心槳槳葉自轉(zhuǎn)運(yùn)動時,遠(yuǎn)心槳槳尖運(yùn)動的Poincaré截面如圖6。同理,考察近心槳槳葉自轉(zhuǎn)運(yùn)動時,近心槳槳尖運(yùn)動的Poincaré截面見圖7。
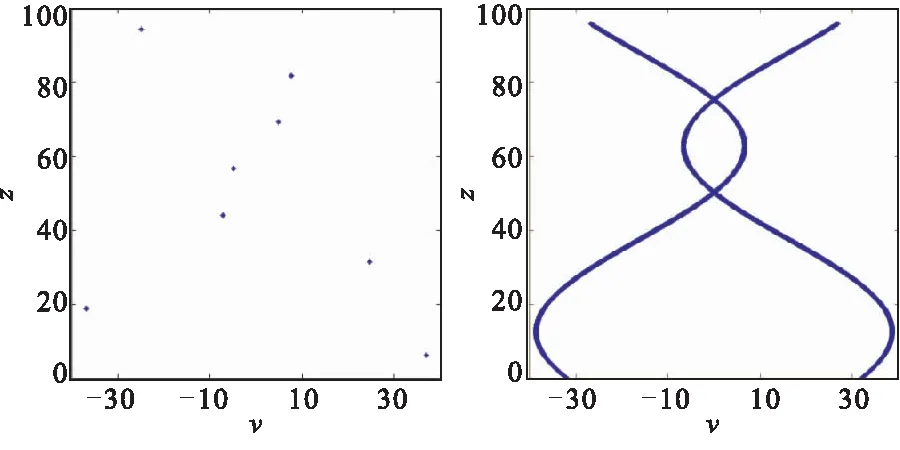
(a)t=10 s (b)t=5000 s
由圖6與圖7可知,遠(yuǎn)心槳與近心槳在排除公轉(zhuǎn)運(yùn)動時,隨著時間t的增加,其Poincaré截面為兩條曲線,槳尖運(yùn)動為準(zhǔn)周期運(yùn)動,無法實(shí)現(xiàn)混沌運(yùn)動。因此,遠(yuǎn)心槳與近心槳的混沌運(yùn)動是自轉(zhuǎn)與公轉(zhuǎn)共同作用才得以實(shí)現(xiàn)。又由圖4(a)、圖5(a)、圖6(a)、圖7(a)可知,在槳葉轉(zhuǎn)動的初期,即時間t較小的時候,此時有無公轉(zhuǎn)都對槳尖運(yùn)動軌跡影響較小,槳尖運(yùn)動軌跡的Poincaré截面均未呈現(xiàn)出混沌狀態(tài)。但隨著時間t的增加,即從公轉(zhuǎn)的長期行為觀察,公轉(zhuǎn)對槳尖運(yùn)動軌跡的影響不斷被放大,使包含公轉(zhuǎn)的槳尖運(yùn)動軌跡的Poincaré截面最終實(shí)現(xiàn)了混沌現(xiàn)象。

(a)t=10 s (b)t=5000 s
3 混合釜流場示蹤實(shí)驗(yàn)
本實(shí)驗(yàn)在中國航天科工集團(tuán)某基地進(jìn)行,實(shí)驗(yàn)設(shè)備為某小型立式捏合機(jī)。攪拌槳豎直安裝,由近心槳與遠(yuǎn)心槳組成,由垂直升降系統(tǒng)帶動與混合釜組成捏合機(jī)的攪拌系統(tǒng)。
混合釜采用透明的圓柱形亞克力材料制作,容器壁厚為3 mm,透光率可達(dá)92%,為減少光線在圓柱形容器側(cè)壁的折射作用造成視覺偏差,從而影響實(shí)驗(yàn)結(jié)果,參考Nor Hanizah Shahirudin[10]和D J Lamberto[11]的解決辦法:將圓柱形實(shí)驗(yàn)容器裝入一個正方體有機(jī)玻璃容器內(nèi),兩個容器之間注入透明的實(shí)驗(yàn)溶液。本實(shí)驗(yàn)制作了一個頂部開孔的亞克力材料方形罩,將混合釜模型固定在方形罩里面,混合釜模型與方形罩之間充滿實(shí)驗(yàn)溶液。實(shí)驗(yàn)溶液選用甘油分析純,24 ℃,甘油粘度μ=1.1 Pa·s,密度ρ=1200 kg/m3。示蹤劑選用熒光素鈉,熒光素鈉在波長為362 nm的紫外線(UV)照射下可激發(fā)出黃綠色的熒光。
實(shí)驗(yàn)過程中保持24 ℃恒溫,在實(shí)驗(yàn)之前將實(shí)驗(yàn)溶液靜止放置12 h以消除溶液中混入的空氣氣泡。為保證示蹤劑在流場內(nèi)可保持良好的跟隨性,示蹤劑溶液由混入3%熒光素鈉的甘油溶液制成。靜止10 min后示蹤劑并無明顯的擴(kuò)散作用,圖8中混合釜頂部的示蹤劑是取出注射器時形成的,并非是示蹤劑的擴(kuò)散,對實(shí)驗(yàn)結(jié)果沒有影響。同時,為獲得最好的示蹤效果,實(shí)驗(yàn)過程中嘗試了多個示蹤劑的添加位置,例如混合釜頂部、底部、側(cè)壁、中心等處,最終發(fā)現(xiàn)在混合釜底部和底部側(cè)壁位置添加示蹤劑的實(shí)驗(yàn)效果最為明顯。用注射器各推入5 ml示蹤劑到混合容器的底部中心與容器底部側(cè)壁,將兩個362 nm UV光源固定在容器左右兩側(cè),如圖8所示。
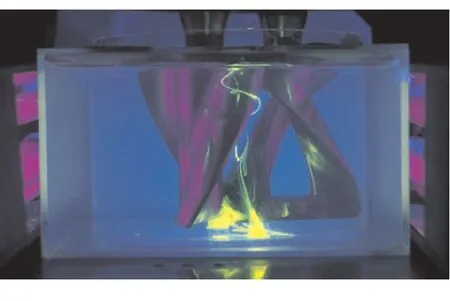
圖8 示蹤劑添加位置示意圖
當(dāng)遠(yuǎn)心槳自轉(zhuǎn)轉(zhuǎn)速ωk=20 rpm時,示蹤劑運(yùn)動的變化趨勢如圖9所示。槳葉旋轉(zhuǎn)使迎料面產(chǎn)生向下的軸向速度,促使容器底部側(cè)壁的示蹤劑沿側(cè)壁向上運(yùn)動,底部中心的示蹤劑沿底部向四周擴(kuò)散,兩處示蹤劑均形成完整的流線。當(dāng)遠(yuǎn)心槳槳葉運(yùn)動到容器側(cè)壁的示蹤劑附近時,吸引示蹤劑纏繞遠(yuǎn)心槳運(yùn)動,運(yùn)動到遠(yuǎn)心槳與近心槳之間的捏合區(qū)時,由于遠(yuǎn)心槳與近心槳具有2∶1的速度差,可以切斷示蹤劑完整的流線,產(chǎn)生剪切與折疊作用。隨后,示蹤劑受到槳葉迎料面向下軸向速度的影響,向容器底部運(yùn)動,同時向四周擴(kuò)散。
雙軸行星運(yùn)動攪拌槳在攪拌時,如圖9(e)所示,遠(yuǎn)心槳與近心槳均可以對示蹤劑進(jìn)行拉伸,示蹤劑纏繞在遠(yuǎn)心槳與近心槳周圍。示蹤劑在兩槳葉之間的捏合區(qū)發(fā)生剪切與折疊作用,如圖9(f)所示。在混合釜流場示蹤實(shí)驗(yàn)中,示蹤劑流線被遠(yuǎn)心槳與近心槳反復(fù)拉伸與折疊,最終散布于整個流場,在主觀視覺上,此時示蹤劑在混合釜流場內(nèi)開始變得雜亂不堪,可以判斷此時的混合釜流場處于混沌狀態(tài)。
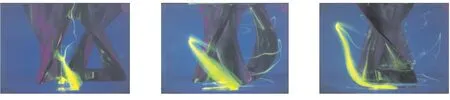
(a)t=1 s (b)t=5 s (c)t=10 s

(d)t=15 s (e)t=20 s (f)t=30 s
4 結(jié)論
(1)通過流體運(yùn)動方程,將混合釜內(nèi)流體流動問題轉(zhuǎn)化為數(shù)學(xué)問題,建立了混合釜流場映射模型。
(2)通過對捏合機(jī)攪拌槳槳尖運(yùn)動方程進(jìn)行分析,證明了攪拌槳行星運(yùn)動過程中,槳尖運(yùn)動軌跡遍歷整個混合釜流場。并通過攪拌槳槳尖運(yùn)動軌跡的Poincaré截面圖,發(fā)現(xiàn)槳尖運(yùn)動軌跡的Poincaré截面圖中的離散點(diǎn)密集的分布在某些固定的區(qū)域,由此判斷攪拌槳槳尖運(yùn)動為混沌運(yùn)動。槳尖運(yùn)動軌跡的Poincaré截面圖中離散點(diǎn)的密集程度與攪拌時間和攪拌轉(zhuǎn)速有關(guān)。
(3)通過混合釜流場示蹤試驗(yàn),驗(yàn)證了混合釜模型的混沌理論,兩個攪拌槳的行星運(yùn)動將使混合釜流場最終引發(fā)混沌運(yùn)動。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
