基于傳感器P 信號的EPS補償控制策略和算法
2020-07-01 10:04:54侯訓波
汽車工程師 2020年6期
侯訓波
(大連創(chuàng)新零部件制造公司)
現(xiàn)代汽車配裝電動助力轉(zhuǎn)向系統(tǒng)(簡稱EPS)已非常普遍,而EPS 系統(tǒng)由于電機和減速機構的存在,增加了轉(zhuǎn)向系統(tǒng)的摩擦力,給汽車回正性能帶來了不良影響[1]。回正性能又是汽車操縱穩(wěn)定性的重要指標,回正性能不良不但使駕駛員產(chǎn)生操縱疲勞,還會影響行車安全。同時,汽車在高速行駛時,其自身的回正能力較強,阻尼較弱,又會產(chǎn)生回正超調(diào)現(xiàn)象,使汽車擺振,同樣會影響行車安全。懸架定位誤差和胎壓異常等會引起汽車跑偏[2],雖不能使汽車發(fā)生嚴重的交通事故,但會增加駕駛員干預汽車的時間,加重駕駛員的疲勞感[3]。針對以上問題,通常由EPS 系統(tǒng)采用帶角度檢測能力的傳感器來配合,實現(xiàn)回正、阻尼及跑偏等補償,依此克服這些缺陷。文章通過對低成本純扭矩傳感器P 信號開展研究,基于此信號實現(xiàn)EPS 系統(tǒng)補償控制,并提出相應控制策略和算法,供EPS 系統(tǒng)工程師參考。
1 傳感器P 信號工作原理
文章所研究的EPS 系統(tǒng)傳感器為Hella 非接觸交變電磁感應式純扭矩傳感器,其輸出扭矩T 信號需要2個轉(zhuǎn)子與PCB 板上的預埋線圈和芯片配合,當2 個轉(zhuǎn)子隨上下軸轉(zhuǎn)動時,由固定位置的預埋線圈感應轉(zhuǎn)子角度變化,利用其相對角度差來檢測并輸出T 信號。其中一個40°轉(zhuǎn)子及芯片所對應輸出的P 信號,即為文章所研究的對象,該P 信號是脈沖寬度調(diào)制(PWM)占空比形式。
當轉(zhuǎn)向盤轉(zhuǎn)動時,將帶動EPS 系統(tǒng)轉(zhuǎn)向上軸旋轉(zhuǎn),使P 信號在12.5%~87.5%內(nèi)變化,且以40°為一個循環(huán)周期性重復變化,這與帶角度檢測的傳感器對比,在結構上缺少了一個磁性小齒輪和對應芯片及相關附件,即缺少了P 信號配合,無法檢測絕對角度。而文章利用P 信號所具備的相對角度檢測能力,再使EPS 系統(tǒng)電子控制單元(簡稱ECU)算法配合,實現(xiàn)絕對角度的間接檢測能力,依此完成EPS 系統(tǒng)補償控制。
2 EPS 系統(tǒng)基本角度算法
EPS 系統(tǒng)基本角度檢測是通過ECU 對PWM_P 信號實時采樣,并按相應規(guī)則計算來獲得,該基本角度是參照車輛直行中位為基準零點的絕對角度。
2.1 異常P 信號過濾
為保證對P 信號正確采樣,采取適當算法對異常P信號進行過濾。通常駕駛員操控轉(zhuǎn)向盤的最快轉(zhuǎn)角速度小于 1 000(°)/s,若 ECU 按 1 ms 的采樣周期,相鄰采樣點變化量ΔPWM_Pn=PWM_Pn- PWM_Pn-1,其通常采樣結果|ΔPWM_Pn|≤1.875%均屬正常,但存在2 個特殊采樣范圍段,如:向右轉(zhuǎn)時由85.625%~87.5%變至12.5%~14.375 5%和向左轉(zhuǎn)時由12.5%~14.375%變至85.625%~87.5%,會出現(xiàn)P 信號采樣值突變,屬于區(qū)段轉(zhuǎn)換的正常現(xiàn)象,除此之外均屬異常,此時需對異常采樣點賦值為前次采樣值。據(jù)此分析所給出的策略,再結合信號自身特點,異常信號過濾算法如下:
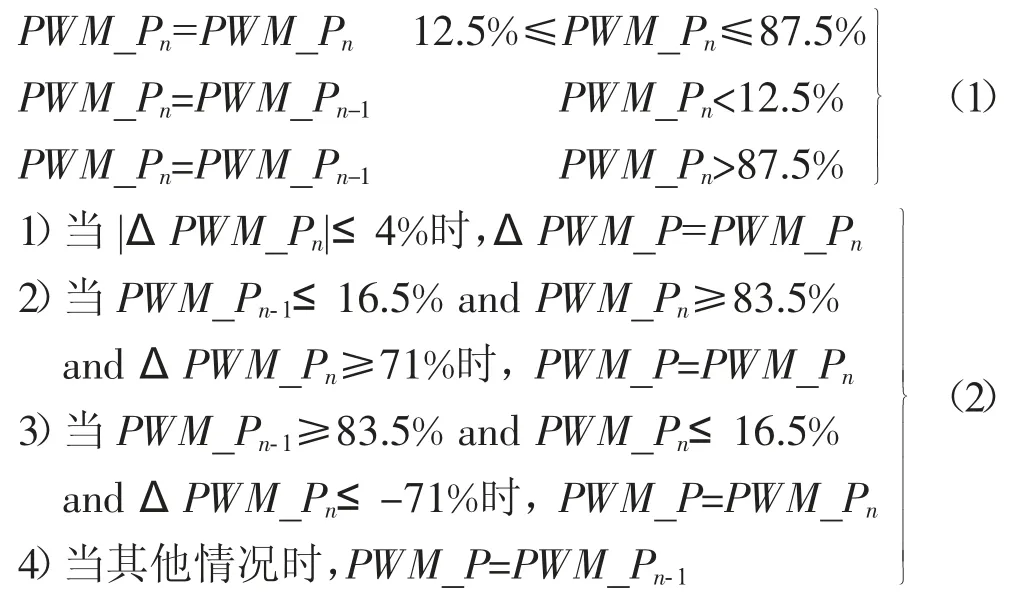
當對第n 次采樣,先按算式(1)進行判斷,再執(zhí)行算式(2),最終對PWM_P 信號采樣賦值。
2.2 EPS 系統(tǒng)基本角度算法
當車輛下線,必須通過手動角度中點標定方法,使EPS 系統(tǒng)角度中點與車輛直行中位(即角度零點)重合,ECU 記憶當前基準P 信號為PWM_P0及所處區(qū)段號K=0。標定后的P 信號與EPS 系統(tǒng)的基準P 信號PWM_P0、區(qū)段號 K 及絕對角度 θ 等的關系,如圖 1 所示。其中θ0為EPS 基準角度,設ΔPWM_P=PWM_PPWM_Pn-1。
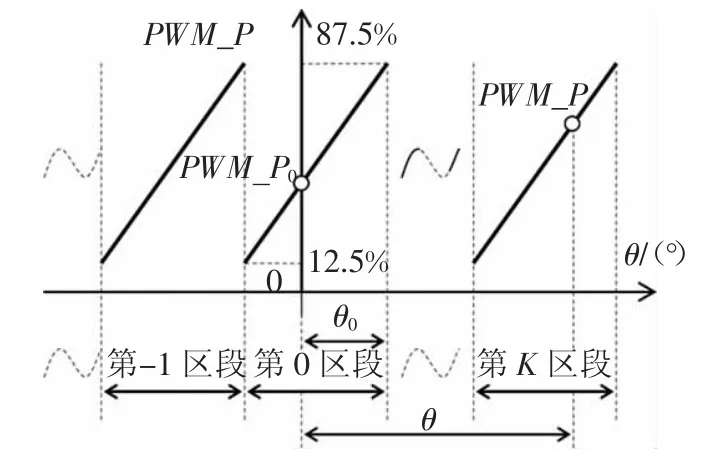
圖1 EPS 角度中點標定后PWM_P 與θ 等的關系示意圖
EPS 基準角度 θ0的算法:

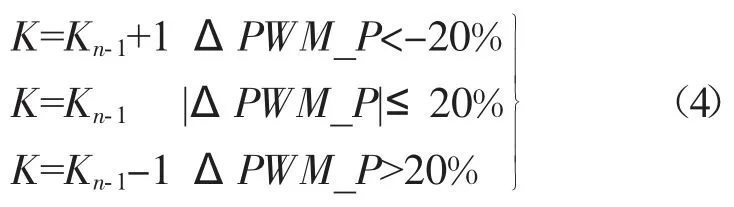
區(qū)段號K 的算法:
EPS 絕對角度 θ 的算法:

由算式(4)可知,區(qū)段號K 與前次區(qū)段號Kn-1相關,需ECU 連續(xù)滾動記憶,使車輛實際所處的角度區(qū)段號與ECU 計算結果保持一致。當EPS 系統(tǒng)斷電后,且車輛轉(zhuǎn)向盤在此期間又被無意轉(zhuǎn)動,在EPS 系統(tǒng)再上電時,ECU 斷電時所記憶的區(qū)段號與車輛實際轉(zhuǎn)向盤所處轉(zhuǎn)角范圍就不能吻合了,會使角度檢測出現(xiàn)嚴重偏差,不能被EPS 系統(tǒng)應用。因此,需找回角度中點,才能恢復各項控制功能。
3 角度中點自動找回和修正的方法
EPS 系統(tǒng)重新上電后,即執(zhí)行角度基本算法,并可獲得當前EPS 絕對轉(zhuǎn)角θ。但此時,ECU 所記憶的區(qū)段號K 已不可信,故所獲EPS 絕對轉(zhuǎn)角θ 值也不可信,需暫停與其相關的功能,如:回正補償、阻尼補償、跑偏補償?shù)取.擡PS 系統(tǒng)找回角度中點后,方可啟動相關功能,但部分功能還需在角度中點修正后,才能啟動。
角度中點找回(或稱功能)是基于初始中點標定可信,即PWM_P0不變的情況下,當區(qū)段號K 可能發(fā)生異常變化而不可信,僅需找回正確K 值即可;角度中點修正(或稱功能)是針對車輛直行零點與EPS 所標定中點可能存在較大偏差,影響了回正等功能,需對PWM_P0和K 同時檢驗并修正。
3.1 車輛直行狀態(tài)分析
當駕駛員操控車輛直行時,轉(zhuǎn)向盤轉(zhuǎn)角也通常在零點±5°范圍內(nèi)微調(diào)來保持汽車直行,并且微調(diào)手力通常小于0.5 N·m。圖2 示出車輛直行狀態(tài)的各物理參數(shù)關系示意圖。假設手動所標定的角度中點處于左側(cè)-5°位置,同時車輛存在向右跑偏現(xiàn)象,此假設為車輛被向左糾偏的直行狀態(tài),EPS 系統(tǒng)角度中點所處為極限狀態(tài)。此時糾偏手力通常小于1.0 N·m,但駕駛員長時間保持糾偏手力在0.4~1.0 N·m,也會引起駕駛疲勞,若糾偏手力大于1.0 N·m 則認為是嚴重跑偏,需要維修解決。維持車輛直行所需糾偏手力≤0.4 N·m,即為符合標準[4],也不會引起駕駛疲勞。
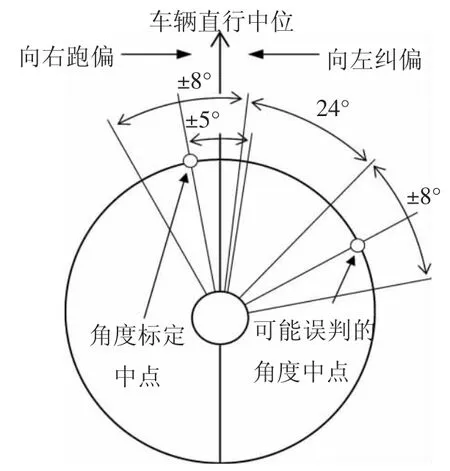
圖2 汽車直行狀態(tài)的各物理參數(shù)關系示意圖
歸納以上分析,車輛保持直行狀態(tài),以車輛角度零點為基準,所體現(xiàn)出的相關參數(shù)變化范圍,如表1 所示。其中手力Ts和轉(zhuǎn)角θ 的方向性定義為:凡手力Ts有利于向右轉(zhuǎn)向為正值,反之為負值;轉(zhuǎn)角θ 以標定中點為基準,向右轉(zhuǎn)角為正值,反之為負值。

表1 車輛直行時相關參數(shù)的表現(xiàn)狀態(tài)
3.2 EPS 角度中點自動找回方法
表2 示出車輛直行時參數(shù)記錄表。
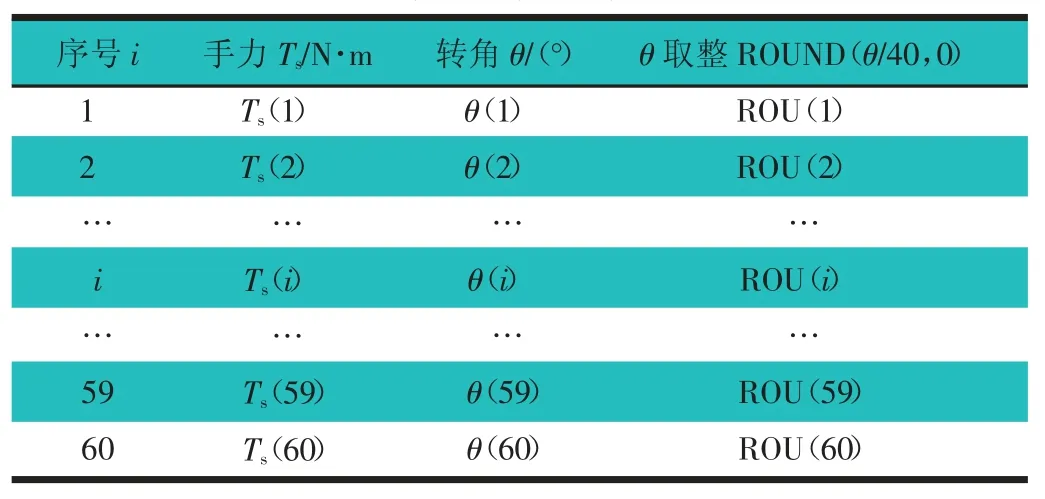
表2 車輛直行時參數(shù)記錄表
當EPS 系統(tǒng)上電先清除表2 中所有數(shù)據(jù)。以0.5 s為記錄周期,僅當 AND(|Ts|≤1.0 N·m,V≥30 km/h,|θ-40 ROUND(θ/40,0)|≤8°)時,方可對相關參數(shù)按表 2進行記錄。當EPS 系統(tǒng)上電所記錄數(shù)據(jù)填滿60 組后,需在2 s 內(nèi)完成統(tǒng)計處理,之后將自動清除表2 中所有記錄,再重新開始采樣并記錄。所記錄數(shù)據(jù)填滿60 組后,需對相同 ROUND(θ/40,0)取整值的頻次數(shù) N 進行統(tǒng)計,提取頻次數(shù)最高值Nmax對應ROUNmax,依此,按算式(6)進行K 值更新。EPS 角度中點找回算法:

在理論上,車輛持續(xù)直行30 s 后,即可自動找回EPS 角度中點。
3.3 EPS 角度中點自動修正方法
每次EPS 系統(tǒng)上電,當完成角度中點找回,區(qū)段號K 首次被更新后,角度中點自動找回功能即刻暫停,同時觸發(fā)角度中點自動修正功能啟動,并按自動找回方法中的要求及規(guī)則,來采樣和記錄表2 中的參數(shù)。
圖3 示出標定點PWM_P0和修正點PWM_PA拓展示意圖。為便于理解,初始標定角度中點的PWM_P0和θ0,已與車輛直行零點出現(xiàn)偏差,而能與車輛直行零點吻合的修正點,其基準P 信號設為PWM_PA,基準角度設為θA,二者角度差值設為ΔθA,ΔPWM_PA代表標定點和修正點的基準P 信號凈差。
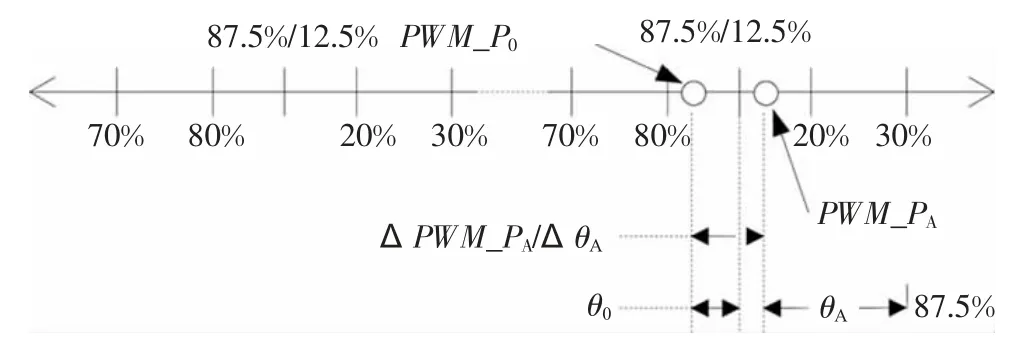
圖3 標定點PWM_P0 和修正點PWM_PA 拓展示意圖
ΔθA和 ΔPWM_PA的算法:

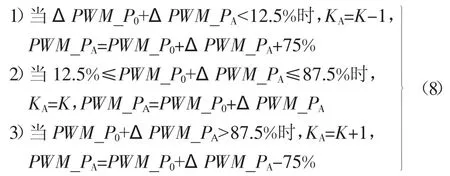
PWM_PA和 KA的算法:
基準角度θA算法:

該功能將持續(xù)運行,最終可使EPS 系統(tǒng)角度中點逼近車輛零點。
4 回正補償和阻尼補償
回正補償特性是由轉(zhuǎn)向盤轉(zhuǎn)角所形成的,并隨車速變化的回正補償電流曲線族;阻尼補償特性是由轉(zhuǎn)向盤轉(zhuǎn)角速度所形成的,并隨車速變化的阻尼補償電流曲線族。以下所涉及補償電流的方向性定義為:凡有利于向右轉(zhuǎn)向的電流值為正,反之為負;同時,由于左右轉(zhuǎn)向的對稱性,所涉及回正過程中的電流特性曲線,均以右側(cè)轉(zhuǎn)向區(qū)域所體現(xiàn)出的特性來表達,而左側(cè)區(qū)域的電流特性的曲線,則是以原點對稱的。
4.1 回正補償和阻尼補償?shù)目刂撇呗?/h3>
圖4 示出回正和阻尼的額定電流隨車速變化曲線,其回正補償控制策略為:當車速V≤Vr1時,視為駐車狀態(tài),無回正補償電流,轉(zhuǎn)向盤所至轉(zhuǎn)向的位置將保持不動;當車速Vr1
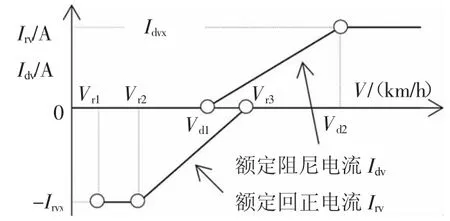
圖4 回正和阻尼的額定電流隨車速變化曲線
即使是同批次車輛,仍具有差異性。考慮到EPS系統(tǒng)所匹配參數(shù)具有普適性,也為避免出現(xiàn)補償風險,需要將回正補償?shù)慕Y束點車速Vr3和阻尼補償?shù)钠瘘c車速Vd1(如圖 4 所示) 設置為Vr3>Vd1,通常Vr3-Vd1=10~20 km/h。結合某電動車的實際情況,推薦匹配參數(shù)范圍,如表3 所示。
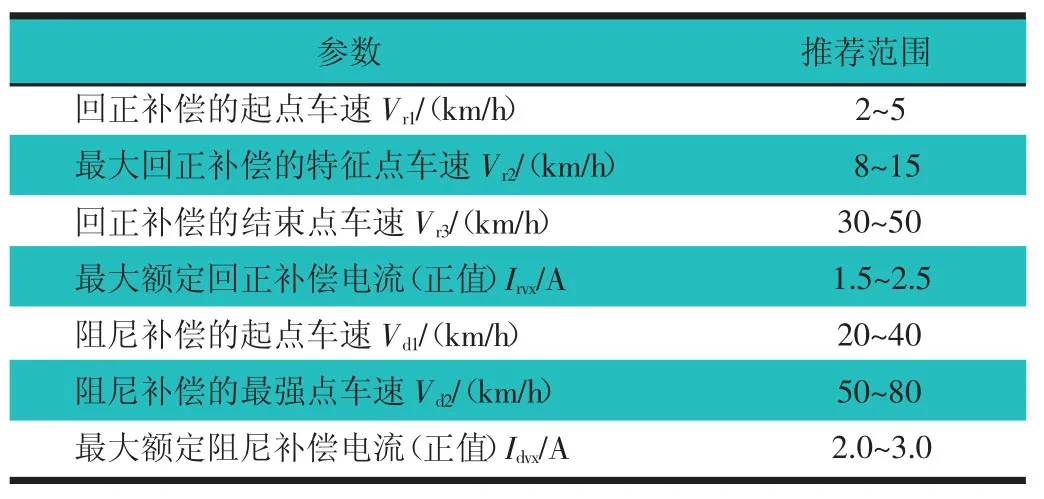
表3 回正和阻尼的補償參數(shù)推薦范圍
4.2 回正補償算法
額定回正補償電流算法:
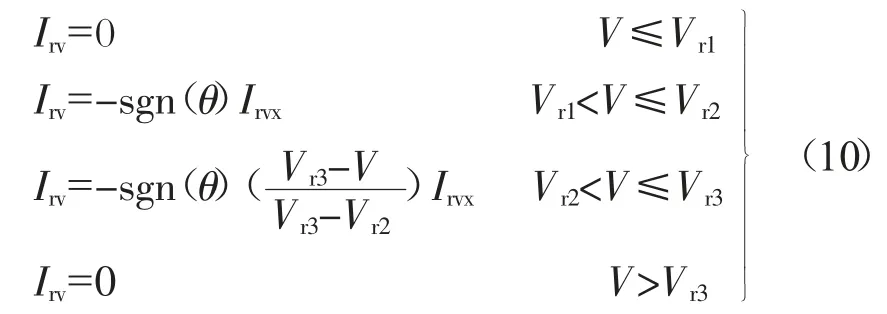
圖5 示出回正補償電流隨角度變化曲線。
圖5 回正補償電流隨角度變化曲線
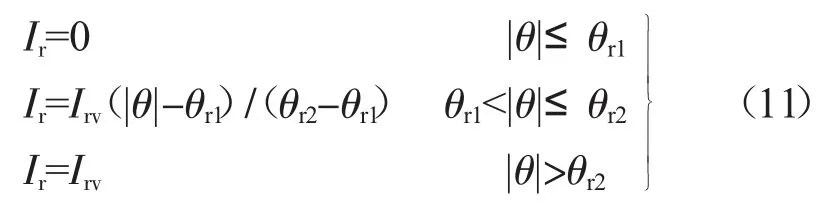
EPS 系統(tǒng)回正補償與所處轉(zhuǎn)角位置相關,首先需設定一個角度死區(qū),在此范圍內(nèi)無需回正補償,以防止干擾車輛直行,該角度死區(qū)定義為θr1,通常為10~20°;同時,在回正過程中,當轉(zhuǎn)向盤回轉(zhuǎn)接近中位時,為避免出現(xiàn)超調(diào)現(xiàn)象,需設定一個角度θr2,作為回正補償能力遞減的起點角度,通常 θr2為 60~90°,由式(10)所確定的各車速下額定回正補償電流,即是在該角度點上的電流值。
回正補償電流算法:
4.3 阻尼補償算法
設轉(zhuǎn)向盤轉(zhuǎn)角速度為:ωd=dθ/dt。額定阻尼補償電流算法:
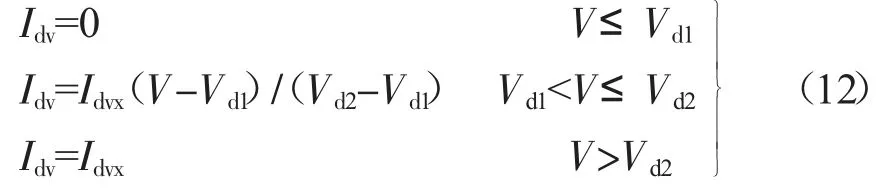
圖6 示出阻尼補償電流隨轉(zhuǎn)角速度變化曲線,在車輛回正過程中,EPS 系統(tǒng)的阻尼補償與轉(zhuǎn)向盤回轉(zhuǎn)的轉(zhuǎn)角速度相關。當轉(zhuǎn)角速度較低時,無需阻尼補償,設該轉(zhuǎn)角速度為 ωd1,通常為 80~120(°)/s;隨著轉(zhuǎn)角速度提高則需加強阻尼作用,特別是在較高車速時,也可避免回正超調(diào),設駕駛員能夠接受的較適宜的回正轉(zhuǎn)角速度為 ωd2,通常為 200~300(°)/s,由式(12)所確定的各車速下的額定阻尼補償電流,即是在該轉(zhuǎn)角速度點上的電流值;同時,在阻尼補償中需設定最大阻尼電流Idx(通常Idx=3.0~4.0 A)限制,以便在必須快打轉(zhuǎn)向時,EPS 系統(tǒng)的助力作用仍能充分發(fā)揮作用。
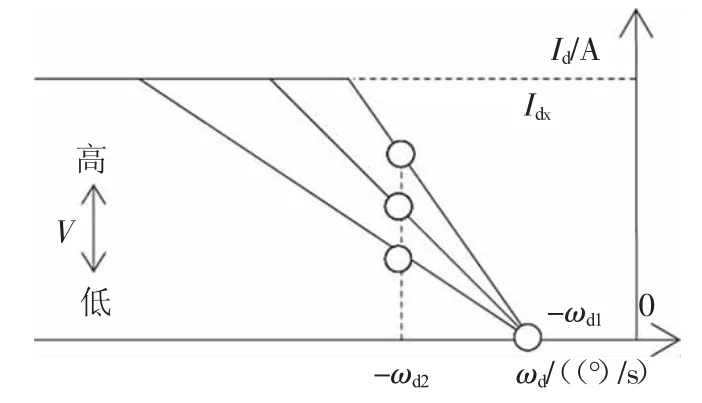
圖6 阻尼補償電流隨轉(zhuǎn)角速度變化曲線
阻尼補償電流算法:

4.4 回正補償和阻尼補償?shù)恼{(diào)校
利用此2 種補償特性的組合匹配,通過在整車上調(diào)校,才能實現(xiàn)良好的轉(zhuǎn)向回正性能。其主要評價要求包括回正后剩余橫擺角速度與剩余橫擺角(或稱殘留角度),以及達到剩余橫擺角速度的時間[5],同時,汽車在高速時的轉(zhuǎn)向回正性能較在低速行駛時更為重要,應更加注重高速行駛的轉(zhuǎn)向回正性能[6]。按表3 所示的調(diào)校參數(shù),推薦在車速為 10,20,30,50,80,100 km/h 時來進行調(diào)校評價。
5 EPS 系統(tǒng)跑偏補償
汽車行駛跑偏表現(xiàn)為直線行駛時,駕駛員將轉(zhuǎn)向盤自由置于中間位置,汽車行駛方向偏離汽車縱軸線,駕駛員需在轉(zhuǎn)向盤上施加一矯正力(或稱糾偏力),以保持汽車直行[2]。GB 17675《汽車轉(zhuǎn)向系統(tǒng)基本要求》中規(guī)定:汽車以80 km/h 的速度行駛時,駕駛員必須能在不做異常轉(zhuǎn)向修正的條件下,保持汽車直線行駛。通常所需修正力≤0.4 N·m,即為符合標準[4]。
汽車跑偏因素較多,其中配裝EPS 系統(tǒng)的車輛,由于角度中點標定的偏差較大,轉(zhuǎn)向盤會出現(xiàn)向EPS 系統(tǒng)所標定角度中點一側(cè)轉(zhuǎn)動的趨勢,從而造成車輛跑偏[3]。該因素所引起的跑偏現(xiàn)象,可由文中EPS 角度中點修正的方法來解決,而針對其它因素所引起的跑偏現(xiàn)象,按以下跑偏補償?shù)姆椒☉獙Α?/p>
5.1 糾偏手力和補償電流梯度估算
根據(jù)3.2 節(jié)中EPS 角度中點找回方法中所規(guī)定的采樣條件及規(guī)則,并利用表2 所記錄的相關數(shù)據(jù),對手力Ts進行平均值統(tǒng)計,獲得糾偏手力ΔTs和補償電流梯度ΔIp的估算值。
糾偏手力和補償電流梯度的估計算法:
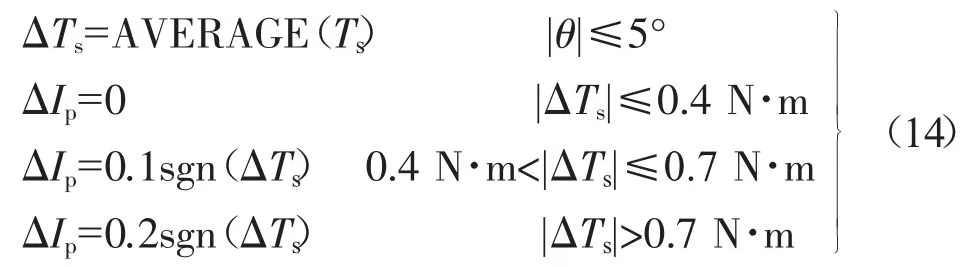
式(13)中的補償電流梯度設定為2 種:0.1 A 和0.2 A,主要目的是當車輛跑偏不嚴重時,以較小的補償電流梯度來增減原補償量;當跑偏較嚴重時,以較大的補償電流梯度來增減原補償量。這2 種補償梯度值均不會引起車輛行駛中的明顯手力變化,但會延遲跑偏補償?shù)倪_標時間。
5.2 EPS 系統(tǒng)跑偏補償
EPS 系統(tǒng)初始上電時,將額定跑偏補償電流設置為Ipn=0,之后EPS 系統(tǒng)無論斷電或上電運行,都需記憶前次Ipn-1值,以便加上式(13)所得的ΔIp估算值,獲得當前需更新的額定跑偏補償電流值。同時,為了保證跑偏補償不會對其它功能造成影響,以及從安全的角度來考慮,需設置額定跑偏補償限制電流Ipmax,該限制電流是以車輛不需維修的糾偏手力(1.0 N·m),對應匹配設定的,通常Ipmax=1.2~1.8 A。
額定跑偏補償電流算法:

當獲得額定跑偏補償電流值(Ipn)后,該跑偏補償特性Ip與轉(zhuǎn)向盤轉(zhuǎn)角θ 相關,在一定的角度范圍有效,并隨角度增大而衰減,如圖7 所示。
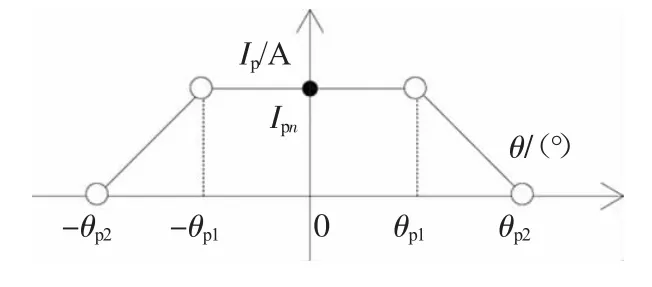
圖7 跑偏補償電流隨角度變化曲線
跑偏補償電流算法:
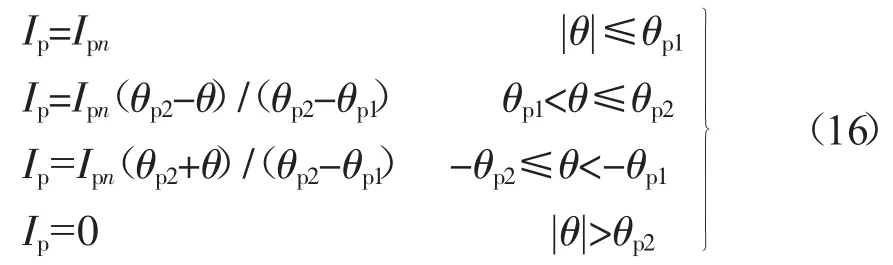
對于圖7 中和式(16)中的2 個特征角度點,通常θp1=10~20°,θp2=20~30°。
6 結論
文章所述的角度中點自動找回功能和角度中點自動修正功能,均是在不影響車輛正常行駛中而自學習完成的,但在EPS 系統(tǒng)上電初期,會存在短時間部分功能被暫停的現(xiàn)象,通常車輛在持續(xù)直行1 min 左右即可恢復。EPS 系統(tǒng)角度中點自動修正功能是不斷重復地采樣和記錄,并滾動修正的,能使EPS 系統(tǒng)角度中點始終保持與車輛角度零點吻合,可使各種補償功能充分發(fā)揮作用;可信的角度檢測能力有助于繼續(xù)開展主動回正和主動阻尼等功能的深入研究。針對回正補償和阻尼補償,需進行匹配組合,并經(jīng)整車調(diào)校,才能實現(xiàn)EPS 系統(tǒng)良好的回正性能;同時,文章所提供的阻尼補償功能,可使車輛在不平路面高速行駛時,具有抑制中位沖擊的能力。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
