四輪路面激勵生成工具開發及應用
2020-07-03 06:20:52徐嘉浩鄭玲玲
汽車工程學報 2020年3期
徐嘉浩,顧 久,鄭玲玲,趙 旗,李 杰
(1.吉林大學 汽車仿真與控制國家重點實驗室,長春 130025; 2.一汽-大眾汽車有限公司,長春 130011)
進行汽車平順性研究,需要描述路面激勵,即建立路面激勵模型[1]。采用四輪汽車模型分析平順性,更接近實車狀態,這就需要建立四輪路面激勵模型。
基于濾波白噪聲方法描述路面激勵,原理明確,使用方便,應用廣泛[2-3]。但是已有的基于濾波白噪聲方法生成路面激勵的研究,既沒有說明如何生成所需白噪聲,也沒有開發便于實際應用的四輪路面激勵生成工具。因此,研究四輪路面激勵模型建立方法和開發其生成工具,自動生成不同路面類型和車速組合下的四輪路面激勵數據,具有研究價值和應用意義。
本文將基于濾波白噪聲方法建立四輪路面激勵模型,應用Matlab 的Guide 模塊開發四輪路面激勵生成工具,將其應用于空間汽車11 自由度振動模型,說明所建立的四輪路面激勵模型及其開發工具的有效性,為四輪路面激勵生成工具的實際應用提供理論和方法基礎。
1 四輪路面激勵模型
1.1 單輪路面激勵模型
參考國際標準和國家標準對路面功率譜密度的描述,同時考慮到低頻情況下頻率趨向于0 時,路面功率譜密度會趨向無窮大的實際情況,將路面功率譜密度Gq(f)表示為[4]:
式中:f為時間頻率;為路面不平度系數,根據路面等級選擇[5];u為車速。
對應式(1),可以得到單輪路面激勵模型為[4]:

式中:q(t)為單輪路面激勵;w(t)為單位功率譜密度和零均值的高斯白噪聲。
1.2 前后輪路面激勵模型
假設汽車前后輪跡重合,后輪路面激勵與前輪路面激勵相比存在時間延遲。前后車輪軸距用L表示,則時間延遲td為:

按照上面的假設,后輪路面激勵qr(t)和前輪路面激勵qf(t)的關系為:

由一階Pade 逼近等效計算時間延遲系統,后輪和前輪的路面激勵傳遞函數Grf(s)為[6]:
式中:qr(s)為qr(t)的拉普拉斯變換;qf(s)為qf(t)的拉普拉斯變換;s為拉普拉斯算子。
對式(6)進行拉普拉斯反變換,可得:

1.3 左右輪路面激勵模型
左輪路面激勵q1(t)和右輪路面激勵q2(t)之間存在相干性,假設左右輪路面激勵的統計特性相同,相位差為0,則左右輪路面激勵的相干性關系為[5]:

式中:coh(s)為左右輪相關函數。
針對coh(s)已經建立了多種公式,其中一種通用公式為[7]:
式中:Bf和Br分別為前軸輪距和后軸輪距。
將式(9)代入式(8),應用一階Pade 逼近等效式(8)[6],有:
對式(10)進行拉普拉斯反變換,可得:

1.4 四輪路面激勵模型
將汽車左前輪、右前輪、左后輪、右后輪的路面激勵分別表示為q1(t)、q2(t)、q3(t)、q4(t),采用式(3)描述q1(t),即:

將式(12)代入式(11),有:
在式(7)中,由q1(t)代替qf(t),q3(t)代替qr(t),再引入式(12),得:
在式(7)中,由q2(t)代替qf(t),q4(t)代替qr(t),再引入式(13),得:
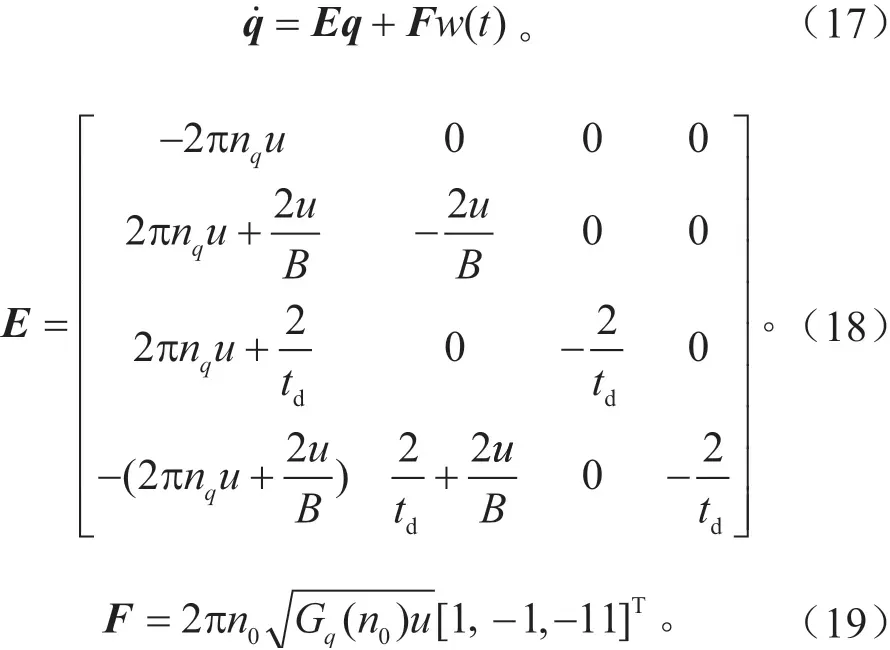
引入路面激勵向量q:

聯立式(12)~(15),得:
2 四輪路面激勵生成工具的Matlab 開發
2.1 高斯白噪聲的生成
在Matlab 中,高斯白噪聲由wgn(m,n,p,‘linear’)函數產生。其中,m、n分別表示生成的零均值高斯白噪聲序列的行數、列數,如果生成一行長度為n的白噪聲序列,則m取1;p表示功率,默認單位為dBW,如果在參數p后方增加參數值‘linear’,則將單位改為W。
給定單邊功率譜密度1,時間間隔dt,參數p表示為:

由式(20)確定p后,再通過wgn(1,n,p,‘linear’)就可以生成單位功率譜密度和零均值的高斯白噪聲。
2.2 四輪路面激勵模型的求解
式(17)是一階微分方程組,求解需要7 個變量:仿真時長T、時間間隔dt、路面不平度系數Gq(n0)、車速u、前后軸距L、前軸輪距Bf和后軸輪距Br。其中,Gq(n0)對應A-H 路面等級[5]。
給定上述7 個變量后,可以采用Runge-Kutta算法求解式(17)。在Matlab 中,采用對應Runge-Kutta 算法的ode45 函數進行求解。
2.3 圖形用戶界面軟件開發
在Matlab 中,開發圖形用戶界面(GUI)軟件的主要過程,如圖1 所示。其主要步驟如下:
(1)啟動Guide 模塊
在Matlab 窗口,在命令行輸入“guide”,按“回車”鍵,即進入GUI 創建模板選擇界面。
(2)新建空白GUI 模板
在創建模板選擇界面,選擇“Blank GUI”,點擊“確定”,即進入GUI 設計界面,新建一個空白GUI 模板。
(3)設計圖形界面和保存fig 文件
在GUI 設計界面,直接拖動所需控件到設計區,為控件調整大小及位置,修改其屬性等。界面設計完成后,通過菜單路徑“文件>保存”,進行保存,文件夾下會出現同名fig 和m 文件。
(4)編輯m 文件并運行調試
(5)導出fig 和m 文件到一個m 文件
實際fig 文件內容完全可用m 程序表示,通過菜單路徑“文件>導出”,將其合并為一個m 文件。
(6)編譯m 文件生成exe 軟件
在Matlab 窗口,使用“mcc -m 文件名”指令,將m 文件編譯成exe 格式文件,可以在裝有“MCRinstaller.exe”環境的電腦上直接運行。
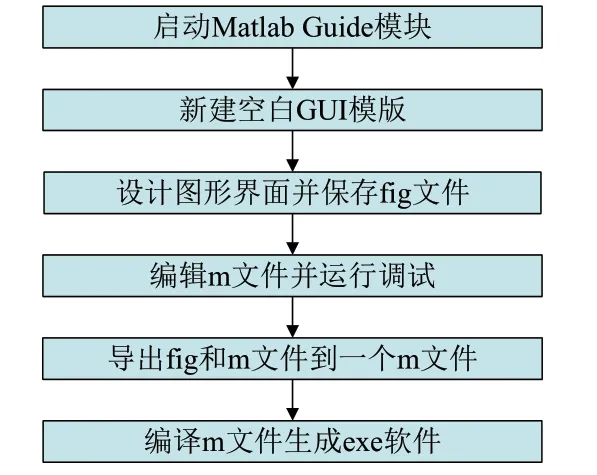
圖1 Guide 開發GUI 軟件的基本步驟
2.4 四輪路面激勵圖形用戶界面設計
使用Guide 模塊中可編輯文本、靜態文本及按鈕等元素,設計了GUI 界面,如圖2 所示。
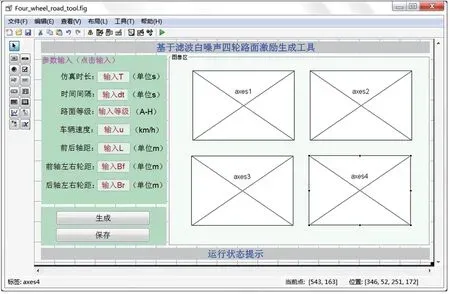
圖2 設計的四輪路面激勵生成工具圖形用戶界面
保存GUI 界面,在同一文件夾下,會出現兩個擴展名分別為fig 和m 的同名文件。fig 文件用于存放圖2 中各種元素的位置及尺寸信息;m 文件用于存放各種元素的多個函數,并且不同函數結尾不用添加end。
每個元素都有一個變量名,可以進行編輯,均可以在m 文件中添加其變量名加CreateFcn、Callback 或Button DownFcn 等命名的函數。這三種函數較常用,不必為每個元素添加所有函數。
而英語的否定句則相對簡單,在簡單句中,若含有系動詞be、情態動詞或助動詞時,直接在這些動詞后面加not構成否定句;而當謂語動詞為行為動詞時,則根據時態在動詞前面加上do的變位和not構成否定句。
CreateFcn 可以在GUI 界面啟動前運行,控制元素的屬性;Callback 在GUI 界面啟動后,使用該元素時才運行,如對于可編輯文本元素,輸入數據后,才執行此函數;Button DownFcn 表示點擊此元素后,才執行相應程序。
針對圖2 中7 個參數的可編輯文本框,創建Callback 函數,實現輸入數據獲得功能,函數中采用global 命令,聲明為全局變量,以便進行參數傳遞。針對圖2 中的“生成”按鈕,創建Button DownFcn函數,將四輪路面激勵模型一階微分方程組求解和圖像顯示程序放入函數中,實現按下按鈕開始計算和顯示圖像的功能。針對“保存”按鈕,添加Button DownFcn 函數,實現按指定格式保存結果到txt 文件的功能。
編輯好m 文件后,運行m 文件,可以啟動GUI,如圖3 所示。在GUI 界面中,輸入全部參數,按下生成按鈕進行計算求解,并且將結果圖像顯示在界面中。按下保存按鈕,可以將結果按指定的格式存到txt 文件中,方便后續使用。
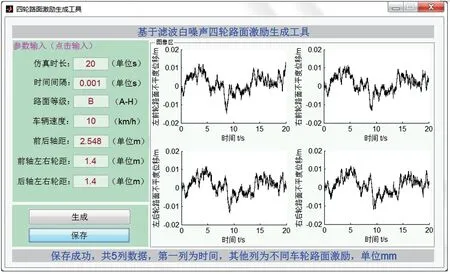
圖3 四輪路面激勵生成工具的圖形界面
生成的四輪路面激勵數據按照5 列形式存儲,如圖4 所示,第1 列為時間,其它4 列分別對應左前輪、右前輪、左后輪和右后輪的路面激勵數據。
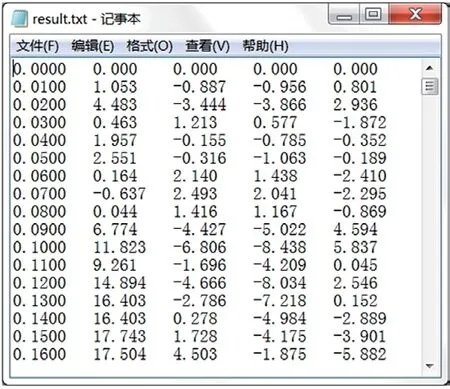
圖4 自動生成的四輪路面激勵數據
3 四輪路面激勵生成工具的應用
3.1 四輪汽車11 自由度系統振動模型
假設不計車體質心繞z軸角振動,不計汽車質心水平面內的振動,考慮簧載質量的垂向、俯仰和側傾運動,前后排座椅和4 個車輪的垂向振動,四輪汽車簡化為11 自由度系統振動模型,如圖5 所示。其中參數見表1。
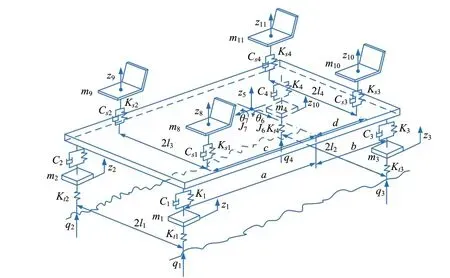
圖5 四輪汽車11 自由度系統振動模型
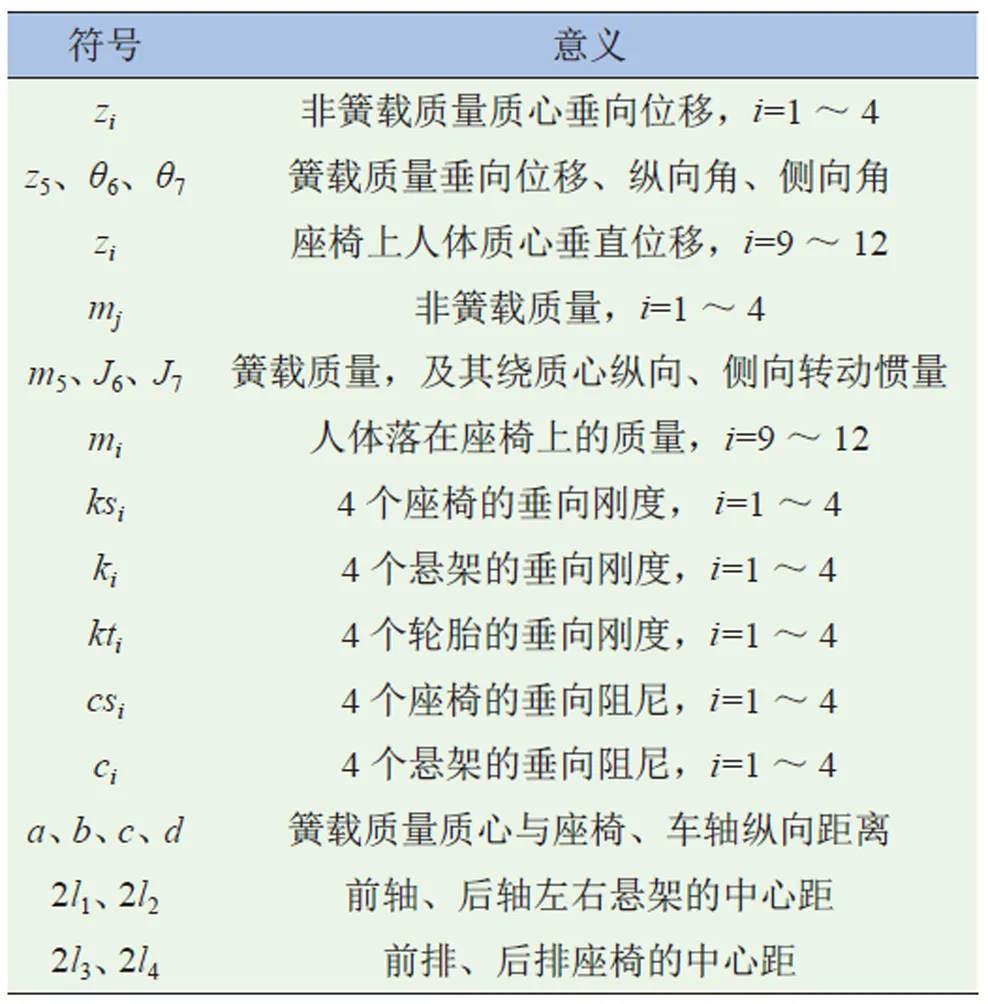
表1 四輪汽車11 自由度系統振動模型參數
由拉格朗日方程,四輪汽車11 自由度系統振動模型微分方程用矩陣可表示為[8]:

式中:m、c、k分別為質量矩陣、阻尼矩陣、剛度矩陣;z為位移響應向量;kf為4 個輪胎剛度組成的剛度矩陣。
為了求解式(21),首先要生成四輪路面激勵向量q,其可以應用開發的四輪路面激勵生成工具自動獲得路面激勵數據txt 文件。
獲得q后,應用Matlab 編程,讀入生成的路面激勵數據txt 文件作為輸入,求解式(21)就可以得到z、z˙ 和˙z˙。
3.2 評價指標
由4 處座椅上人體質心加速度的響應數據,可以計算其均方根值,即:
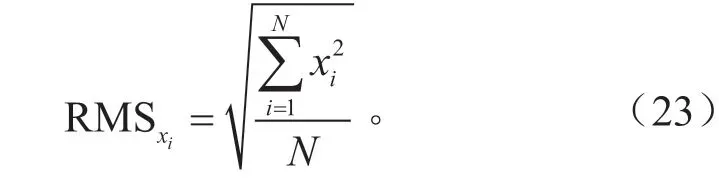
式中:xi為加速度響應數據;N為響應數據個數。
確定4 處座椅上人體質心加速度的均方根值,將它們作為評價平順性的評價指標。
3.3 仿真應用
在B 級路面上,車速由10 km/h 到100 km/h,采用某轎車數據[8],應用開發的四輪路面激勵生成工具自動獲得增量為10 km/h 的多組路面激勵數據文件。
將四輪路面激勵數據文件作為輸入,進行多組仿真試驗,可以得到評價指標和車速之間的關系,見表2。
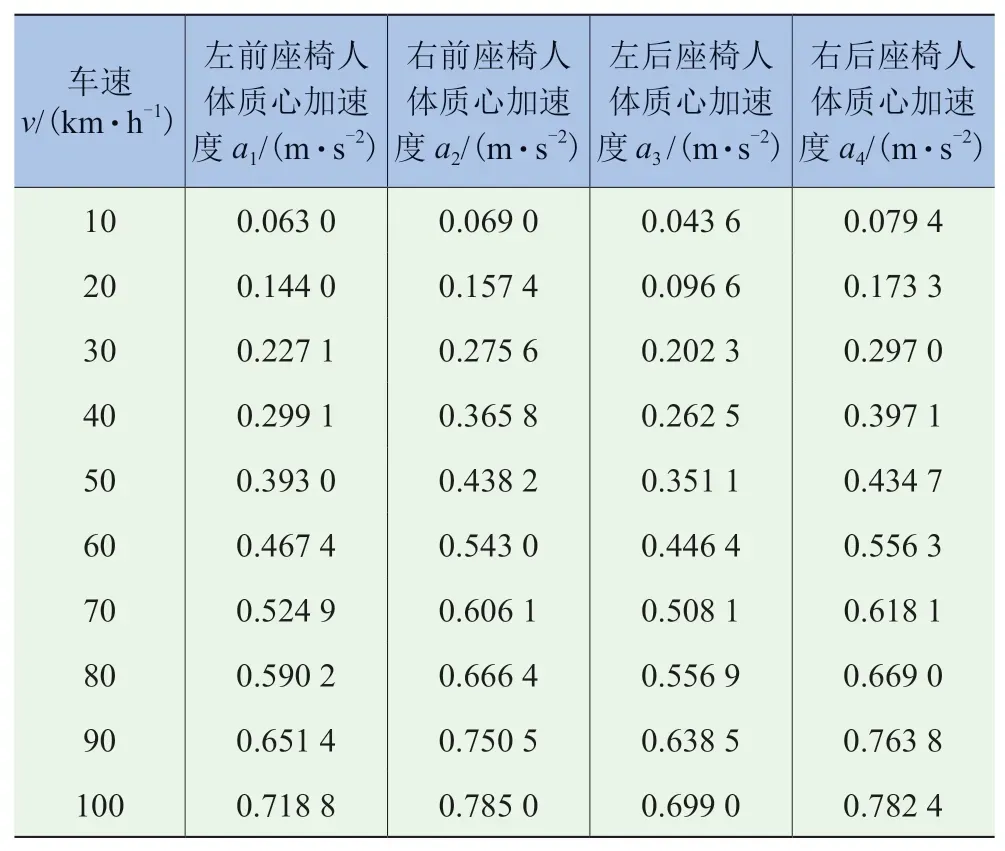
表2 B 級路面下10 ~100 km/h 范圍內的評價指標
由表2 可知,4 處座椅上人體質心加速度,隨著車速的增加而不斷增加,表明隨著車速增大,駕駛員和乘員的乘坐舒適性降低。
4 結論
基于濾波白噪聲方法建立了四輪路面激勵模型,給出了Matlab 中高斯白噪聲生成函數wgn 的參數設置方法。
使用Matlab 中的Guide 模塊,開發了四輪路面激勵生成工具,可以應用圖形用戶界面方便地輸入相關參數,快速自動生成四輪路面激勵,并將數據存放到txt 文件中。
將四輪路面激勵生成工具生成的四輪路面激勵數據,輸入到四輪汽車11 自由度系統振動模型中,獲得了B 級路面上不同座椅位置人體質心加速度與車速的關系,用于評價汽車平順性,說明了所建立的四輪路面激勵模型及其開發工具的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(2020年6期)2020-09-10 07:22:44
當代陜西(2020年13期)2020-08-24 08:22:02
數學物理學報(2020年2期)2020-06-02 11:29:24
數學物理學報(2017年6期)2018-01-22 02:26:40
制造技術與機床(2017年5期)2018-01-19 02:49:17
濰坊學院學報(2016年2期)2016-12-01 13:00:11
光學精密工程(2016年6期)2016-11-07 09:07:19