封閉測試場條件下基于DSRC 的車聯網通信性能測試
2020-07-03 06:23:26劉丁貝張心睿王潤民李驍馳徐志剛
汽車工程學報 2020年3期
劉丁貝,張心睿,王潤民,李驍馳,徐志剛
(1. 長安大學 交通運輸部認定自動駕駛封閉場地測試基地 車聯網與智能汽車測試技術工程研究中心,西安 710064;2.河南交通投資集團有限公司,鄭州 450016)
車聯網(Vehicle to Everything,V2X)是車載互聯技術 (Vehicle to Vehicle,V2V),車與基礎設施互聯技術(Vehicle to Infrastructure,V2I), 車與行人互聯技術(Vehicle to Pedestrian,V2P),以及車與其它相關網絡互聯技術的統稱,其作為智能網聯汽車和新一代智能交通系統的關鍵技術,近年來受到越來越多的關注。基于IEEE 802.11p 協議標準和IEEE 1609 協議族的DSRC,是為車聯網通信專門設計的短程無線通信協議標準[1],也是目前應用最廣泛的V2X 通信標準[2]。目前,V2X 基礎應用主要分為安全、效率、信息服務三大部分,其中對于安全類應用,V2X 通信性能至關重要,尤其在緊急狀況下,通信性能降低會造成非常嚴重的后果。如果可以對V2X 通信性能在多個常見場景中進行相關的測試,并根據測試結果進行安全類應用的開發,就能提升安全類應用的安全性。
現有的研究中已經有許多針對DSRC 通信性能的測試,DUAN 等[3]和TANG 等[4]設計并實現了與DSRC 相關的測試平臺,可以用來測試和分析DSRC 通信性能,但是沒有使用測試平臺進行實車測試。王潤民等[5-10]采用Veins、NS-2 或者Matlab 等仿真軟件對DSRC 通信性能進行測試,但是沒有用實車測試來驗證仿真測試結論的有效性。XU 等[11-17]對DSRC 通信性能進行了實車測試,但每篇文獻采用的測試場景比較單一,不能相對全面地評估DSRC 通信性能。張釗等[18]在多種場景下對DSRC 通信性能進行了實車測試,但是場景描述得比較模糊,測試流程解釋得比較籠統。
針對上述問題,首先構建了靜態條件下車路視距與非視距通信、動態條件下車路視距與非視距通信、靜態條件下車車視距與非視距通信、動態條件下車車視距與非視距通信等8 種實際交通中經常出現的V2X 應用場景;然后基于DSRC 的主要通信性能參數——時延和丟包率,在專用的“長安大學車聯網與智能汽車試驗場”中進行了實車測試;最后對各個試驗場景下測得的丟包率和時延進行對比分析,得到了影響DSRC 通信性能的主要因素。
1 場景構建
1.1 測試場地情況
對于傳統汽車測試來說,封閉測試場可以有效控制行人、車輛等干擾,具有更高的安全性;集成了多種測試場景,可以滿足大部分車輛的測試需求,具有更高的多樣性;允許測試者根據測試內容進行設備安裝,場景布置,擁有很強的拓展性。因此,封閉測試場具備在各項極限條件下安全地完成多種車輛性能測試的能力,是車聯網和智能汽車測試的理想場地。實車測試在長安大學車聯網與智能汽車試驗場上進行。該試驗場涵蓋高速路、城市道路、鄉村道路、隧道、建筑、樹木等絕大部分真實交通場景中的道路條件和道路環境設施,可以在保證安全的前提下,完成V2X 的實車測試。試驗場整體道路場景結構如圖1 所示,BD 段所在直道總長約1.1 km,寬約17 m,具有3 個車道;EF 段直道長約230 m;CF 道總長約200 m,其中靠近F 端小路寬約6 m。路側單元(Roadside Unit,RSU)設置在A、B 兩點處,B、E 兩點間的區域存在高度不超過10 m 的平房,還有灌木叢和高約6 m 的樹木。

圖1 長安大學車聯網與智能汽車測試場
1.2 測試設備選型及參數
實測中使用了兩輛車,兩輛車搭載的車載單元(Onboard Unit,OBU)和RSU 都可以相互發送消息。采用的DSRC 設備來自于金溢科技,設備的技術規格見表1。
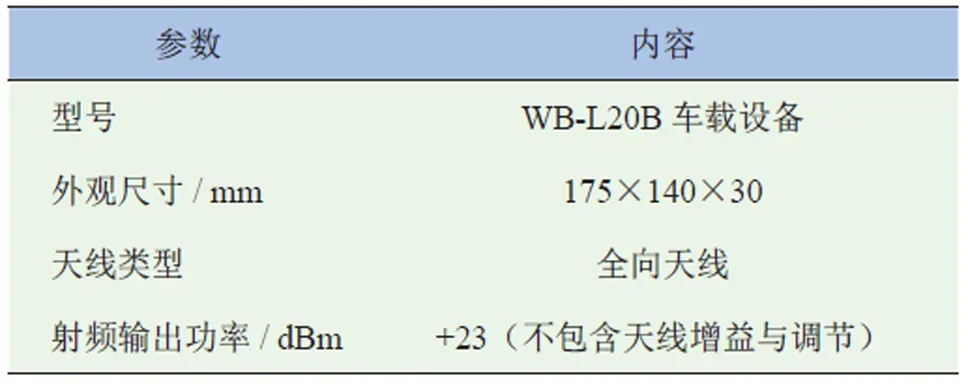
表1 OBU 技術規格
續表1:

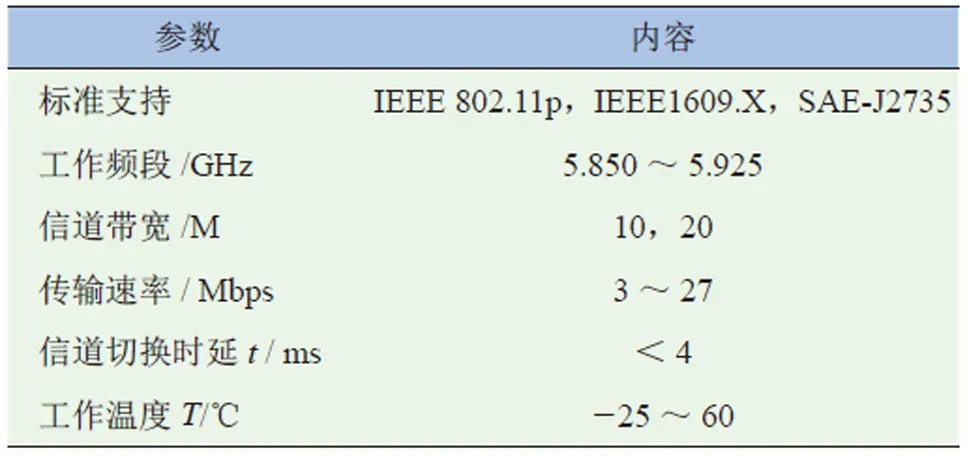
表2 RSU 技術規格
2 測試評價指標及測試方案
2.1 測試評價指標
在車聯網性能測試中,通常采用不同的指標來評價車聯網性能,經典的網絡仿真指標有3 個[19-21]。
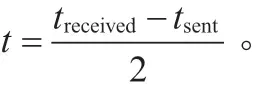
2.1.1 時延
DE 是數據包從源節點正確傳輸到目標節點所需要的時間,其平均值為平均DE。在車聯網環境下車輛跟馳速度快且跟馳間距小,這就要求車輛之間的通信DE 必須保持在極低的范圍內,因此,這個指標對于安全關鍵型應用具有特別重要的意義。測試DE 時,由于DSRC 通信設備之間時鐘不能精確同步,所以通過計算往返時間(Round-Trip Time,RTT),即數據(一個報文或分組)從源節點到目的節點間往返所需的時間間隔,來計算通信DE,其計算公式為:
2.1.2 丟包率
PLR 為目標節點丟失的數據包與源節點應用層發送的數據包的比值關系,即丟失數據包的統計度量,主要體現了車聯網的兩個主要特性:網絡可靠性和網絡擁塞/通信狀況。其計算公式為:
式中:Ps為源節點應用層發送的數據包;Pr為目標節點接收的數據包。
2.1.3 數據包投遞率
數據包投遞率(Packet Delivery Ratio,PDR)為目標節點接收到的數據包與源節點應用層發送的數據包的比值關系,即正確傳輸數據包的統計度量和PLR 反映的車聯網特性相同,其計算公式為:

2.2 測試方案
2.2.1 靜態條件下的車路通信測試
2.2.1.1 視距條件下通信性能測試
如圖2 所示,B 點處的RSU 向停在圖1 BD段直道上距離B 點100 m 處的搭載OBU 的車輛以10 Hz 的頻率發送1 000 個基本安全消息(Basic Safety Message,BSM)數據包,數據包大小不超過340 個bytes,包含數據包序號、發送時間、經緯度、車速,海拔高度等信息,重復發送5 次。然后將搭載OBU 的車輛停在BD 段直道上距離B 點200 m、300 m、400 m、500 m、600 m、700 m、800 m 處,重復試驗,由式(1)計算各距離數據包傳輸DE 的均值作為各距離下的DE。OBU 發送的數據包數量記為Ps,RSU 接收的數據包數量記為Pr,則PLR由式(2)可得。最后將車輛停在BD 段直道上距離B 點100 m 處,控制RSU 向OBU 發送長度為256 bytes 的自定義數據包,每10 s 增加256 bytes 數據包長度直到數據包長度為2 048 bytes,由式(1)和式(2)計算不同數據包長度條件下的車路通信PLR 與DE。

圖2 靜態條件下車路視距通信
2.2.1.2 非視距條件下通信性能測試
如圖3 所示,B 點處的RSU 向停在圖1 BD 段直道上距離B 點100 m 處的搭載OBU 的車輛以10 Hz 的頻率發送1 000 個BSM 數據包,重復發送5 次。然后將搭載OBU 的車輛停在BD 段直道上距離A點150 m、200 m、250 m 處,重復試驗,計算各距離PLR 和DE。

圖3 靜態條件下車路非視距通信
2.2.2 動態條件下的車路通信測試
2.2.2.1 視距條件下通信性能測試
如圖4 所示,在BD 段直道上,一輛搭載OBU的車停在距離B 點處RSU 800 m 的位置,然后以20 km/h 的速度駛向RSU,在車輛行駛的過程中,RSU 以10 Hz 的頻率向車輛發送BSM 數據包,車輛行駛到B 點的時候停止發送數據包,重復測試5次。提升車速至40 km/h、60 km/h,重復試驗,分析PLR 和DE。

圖4 動態條件下車路視距通信
2.2.2.2 非視距條件下通信性能測試
如圖5 所示,在BD 段直道上,一輛搭載OBU的車停在距離A 點處RSU 800 m 的位置,然后以20 km/h 的速度駛向RSU,在車輛行駛的過程中,RSU 以10 Hz 的頻率向車輛發送BSM 數據包,車輛行駛到A 點的時候停止發送,重復測試5 次。提升車速至40 km/h、60 km/h,重復試驗,分析PLR和DE。
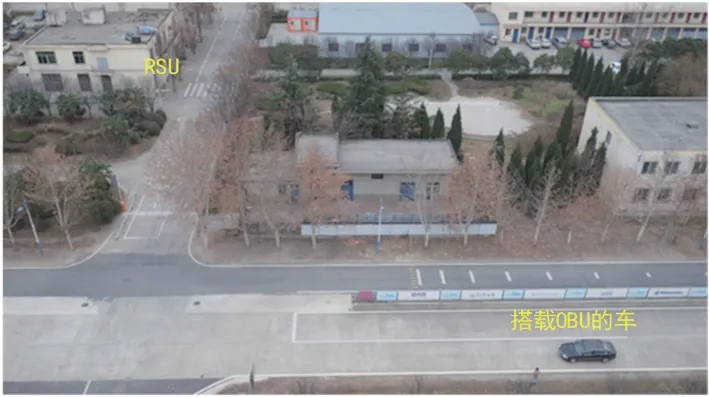
圖5 動態條件下車路非視距通信
2.2.3 靜態條件下的車車通信測試
2.2.3.1 視距條件下通信性能測試
如圖6 所示,兩輛搭載OBU 的車輛分別停在圖1 BD 段直道上相距100 m 的位置,然后以10 Hz 的頻率相互發送1 000 個BSM 數據包,重復發送5 次。然后增大兩輛車之間的距離至200 m、300 m、400 m、500 m、600 m、700 m、800 m,重復試驗,計算各距離PLR 和DE。再將兩車距離控制在100 m,其中一臺OBU 向另一臺OBU 發送長度為256 bytes 的自定義數據包,每10 s 增加256 bytes 數據包長度直到數據包長度為2 048 bytes,計算不同數據包長度條件下的車車通信PLR 和DE。

圖6 靜態條件下車車視距通信
2.2.3.2 非視距條件下通信性能測試
如圖7 所示,一輛搭載OBU 的車輛停放于A點處,另一輛搭載OBU 的車輛停在圖1 BD 段直道上距離A 點100 m 的位置向A 點處的OBU 以10 Hz 的頻率發送1 000 個BSM 數據包,重復發送5次。然后將搭載OBU 的車輛停在BD 段直道上距離A 點100 m 處重復上述試驗,并依此類推,在150 m、200 m、250 m 處重復試驗,計算各距離PLR和DE。試驗期間,兩臺OBU 之間存在建筑遮擋。

圖7 靜態條件下車車非視距通信
2.2.4 動態條件下的車車通信測試
2.2.4.1 視距條件下通信性能測試
如圖8 所示,兩輛搭載OBU 的車以40 km/h 的速度一前一后沿著圖1所示的B、D點所在直道行駛,車間距50 m 左右,行駛大約1 000 m。兩車行駛過程中,一直以10 Hz 的頻率相互發送BSM 數據包,重復測試5 次。提升車速至60 km/h、80 km/h,重復試驗,計算PLR 和DE。

圖8 動態條件下車車視距通信
2.2.4.12 非視距條件下通信性能測試
如圖9 所示,兩輛搭載OBU 的車分別在圖1所示十字路口的C、E 點處以20 km/h 的速度朝著F點處行駛,車輛行駛過程中,一直以10 Hz 的頻率相互發送BSM 數據包,每輛車在行駛到十字路口時停止發送數據包,重復測試5 次。提升車速至40 km/h,重復試驗,計算PLR 和DE。試驗期間,兩臺OBU 之間存在樹木遮擋。

圖9 動態條件下車車非視距通信
3 結果及分析
3.1 車路通信試驗結果及分析
由圖10 可知,在動態和靜態條件下,60 km/h 以下的車速對PLR 和DE 的影響較小,隨著車速增加,PLR 和DE 會略微變大,但并不明顯。通信距離對PLR 的影響較大,無論視距還是非視距條件,PLR隨著通信距離增加而變大。視距條件下,700 m 以內,PLR 幾乎為0,通信距離大于700 m 時,PLR明顯增大至70%以上。這表明距離會對V2I 通信PLR 造成影響,距離小于700 m 時,PLR 較小,且受距離影響小;當通信距離大于700 m 時,V2I通信丟包明顯增多,受距離影響大。另一方面,通過對比圖中視距與非視距PLR 曲線可以看出,非視距條件下,PLR 明顯更高,距離小于150 m 時,PLR 幾乎為0;距離大于150 m 時,PLR 突然增大至80%以上,這表明當OBU 與RSU 之間存在遮蔽物,且距離增大至150 m 以上時,PLR 會明顯變大。
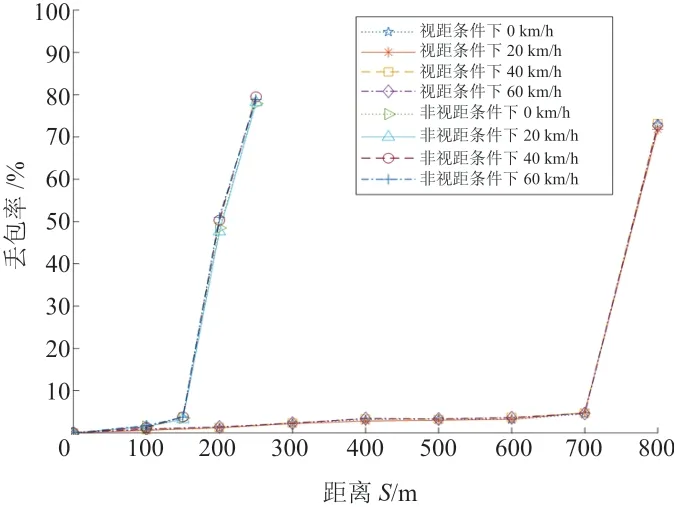
圖10 車路通信丟包率
由圖11 可知,相對于PLR,距離對DE 的影響有限,距離增加時,DE 沒有顯著增大,穩定在4 ~5 ms 之間。但是對比視距與非視距下的DE 曲線可以看出,非視距條件下DE 略高,由此可知,遮蔽物的存在會導致DE 增大。
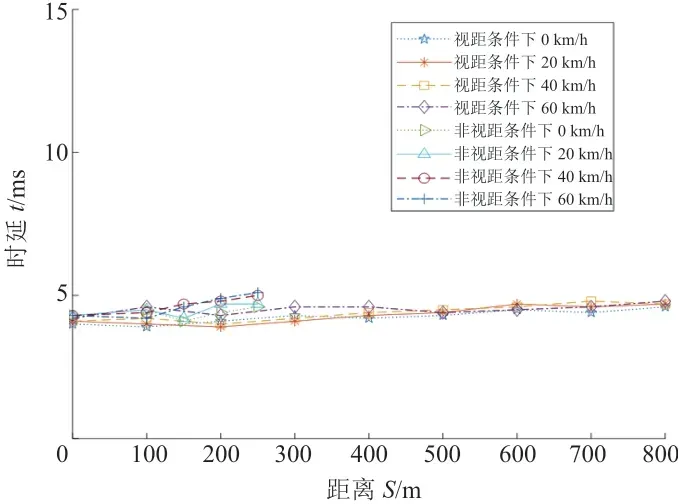
圖11 車路通信時延
綜上所述,在本文測試場景中,影響V2I 通信質量的主要因素是通信距離和遮蔽物,RSU 和OBU 之間距離增大或存在遮蔽物時,通信性能明顯變差。但是遮蔽物和距離對DE 的影響較小,雖然DE 會隨遮蔽物的存在或距離的增大而增大,但是基本穩定在5 ms 左右,增大的幅度很小。在車速較低的情況下,車速對PLR 和DE 的影響較小。
3.2 車車通信試驗結果及分析
在測試場景中,靜態條件下得到的PLR 和DE如圖12 所示,PLR 隨著通信距離增加而增大。視距條件下,在700 m 以內,PLR 變大的趨勢較為平緩,保持在10%以內;通信距離大于700 m 時,PLR 明顯變大至90%以上。非視距條件下,在100 m 以內PLR 保持在10%;大于100 m 時,PLR迅速增大至80%以上。另一方面,DE 隨著距離的增大也變大,但是變化的幅度很小,維持在5 ms左右。非視距條件下DE 略高于視距條件下DE。
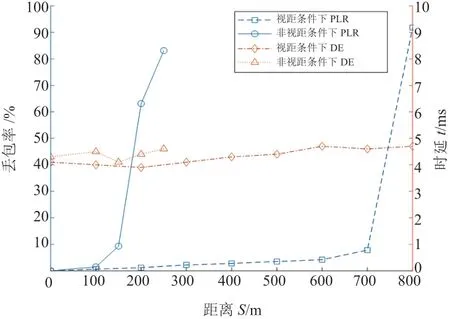
圖 12 靜態條件下車車通信的丟包率和時延
兩輛搭載OBU 的車輛一前一后行駛時,得到的PLR 和DE 如圖13 所示,在車輛跟馳行駛的場景中,隨著車速的增加,PLR 緩慢增加,但不明顯。DE 也隨著車速增加而變大,但增加幅度也很小,這表明在車輛跟馳行駛且兩輛車車速不超過80 km/h 時,DE 和PLR 受車速影響較小,幾乎不變。
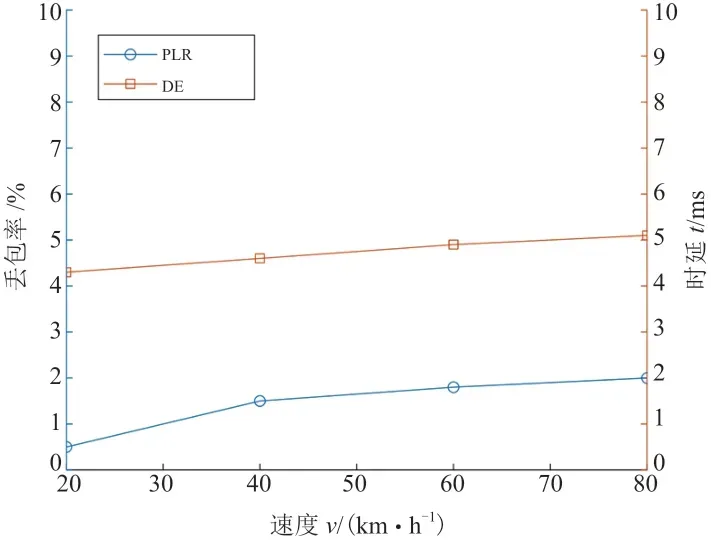
圖13 跟馳場景下車車通信的丟包率和時延
當兩輛搭載OBU 的車同時向交叉路口行駛,并且在非視距條件下,得到的PLR 和DE 如圖14所示。由圖可知,PLR 隨著距離的增大而增大,在兩車距離小于150 m 時,增大程度較小,大于150 m 時,PLR 明顯變大。對比20 km/h 與40 km/h的PLR 曲線可知,車速越快,PLR 越大,但是在車速低于40 km/h 時,PLR 受車速影響較小。DE 隨著距離的增大也變大,但是變化的幅度很小,維持在5 ms 左右。車速不超過40 km/h 時,車速變大,DE 增大,但不明顯。
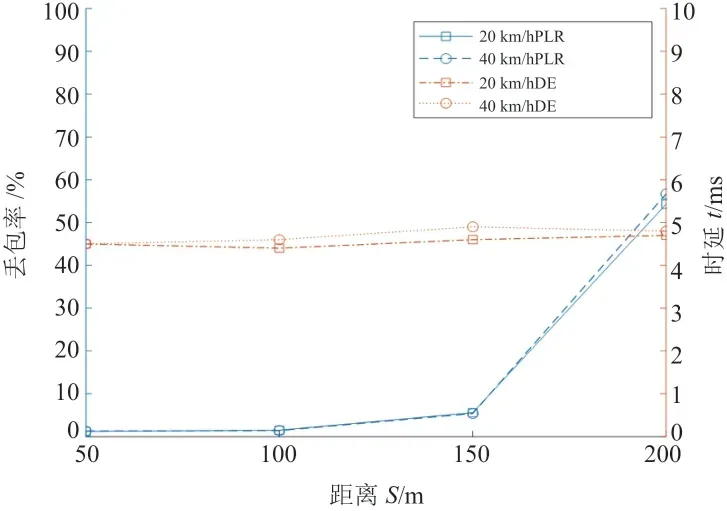
圖 14 會車場景下車車通信的丟包率和時延
通過分析V2V 通信的試驗結果,靜態條件下,PLR 隨著兩車距離的增大而增大,700 m 以內增長較慢,大于700 m 時,增長較快。DE 也隨著距離增大而增大,但是變化幅度很小,集中在5 ms 左右,因此,距離對DE 的影響不大。非視距條件下,PLR和DE 更大,但DE 增加不明顯。在動態條件下的車輛跟馳場景中,車速增大,PLR 和DE 都變大,但是變化幅度很小,因此,在車輛跟馳場景中,低于80 km/h 的車速對V2V 通信質量影響很小。而在動態條件下的車輛交叉口會車場景中,距離變大,PLR 增大,在兩車到路口的距離小于150 m 時,增大程度較小,大于150 m 時,PLR 明顯變大,車速低于40 km/h 時,車速變快,PLR 也會增大,但是增大程度不明顯,DE 受車速和距離的影響較小,維持在5 ms 左右。綜上所述,在本文的測試場景中,影響V2V 通信質量的主要因素是通信距離和遮蔽物。
3.3 數據包長度對DSRC 通信的影響
數據包長度變化條件下,視距內距離100 m的車路通信和車車通信的PLR 與DE 如圖15 所示。隨著數據包長度的變大,PLR 在0.6%左右,時間DE 在5 ms 左右,由此可見數據包長度小于2 048 bytes 時,數據包長度的變化對DSRC 通信的PLR 和DE 影響很小。
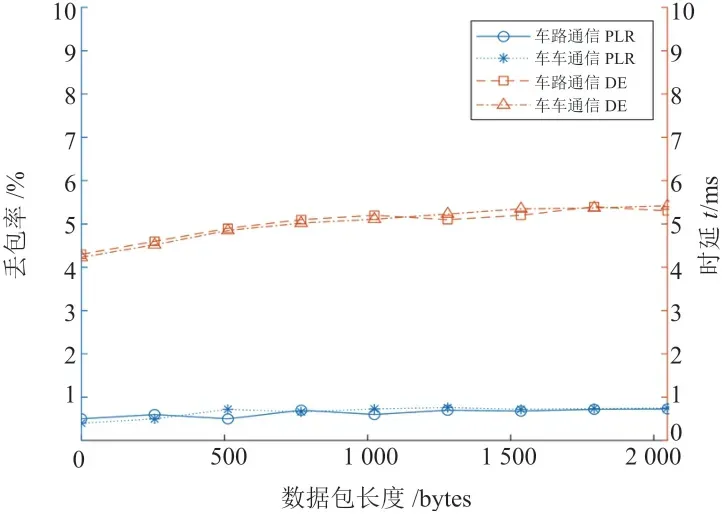
圖15 數據包長度變化條件下的丟包率和時延
3.3 通信性能下降原因分析
在該測試場景中,影響DSRC 通信質量的主要因素是通信距離和遮蔽物。通信距離會影響通信質量的主要原因是自由空間的路徑損耗。
式中:GT為發射天線的增益;GR為接收天線的增益;2λ為波長;d為通信距離。DSRC 通信的工作頻段在5.9 GHz 左右,所以根據波長的計算公式為:
可得2λ值很小,大約在5.08 cm左右,屬于超短波。
隨著d的增大路徑損耗也會增大,所以通信距離增大造成PLR 升高。
遮蔽物影響通信性能的主要原因是由于繞射損耗導致的。根據文獻[22]可以得到繞射損耗:
式中:β為障礙物每一道墻體引起的衰減;n為墻體層數;dγ為障礙物的單位厚度引起的衰減,所以障礙物的存在會引起傳輸功率的降低,從而造成PLR的增高。
4 結論
本文針對目前DSRC 性能評估理論研究較多,而實際測試較少的情況,對幾個具有代表性的DSRC 通信場景進行了實車測試,主要是通過DE和PLR 對DSRC 的通信性能進行評估,并對造成試驗結果的原因進行了分析。通過實車測試發現,在真實場景中,影響DSRC 通信性能的主要因素是通信距離和遮蔽物的存在。在本文的測試場景中,DSRC 的通信DE 低于10 ms,完全滿足主動安全應用對通信DE 的要求。但是在城市道路條件下,綠化帶和建筑會增加DSRC 的PLR,導致在非視距情況下,安全信息可能無法完全傳輸,因此,下一步研究可以針對如何提高復雜環境下DSRC 的通信性能,例如可以在關鍵地段或者路口設置RSU,通過RSU 轉發OBU 的信息來減少遮蔽物的影響。