基于SMC的六相雙Y移30°PMSM直接轉矩容錯控制
2020-07-04 02:13:18赫雪萍朱建光梁晨
電腦知識與技術 2020年13期
赫雪萍 朱建光 梁晨

摘要:該文以雙Y移30°六相PMSM為研究對象,針對電機斷相故障,提出了直接轉矩容錯控制算法;為增強系統的魯棒性能和動態性能,設計了滑模控制系統代替在轉速環上的傳統PI控制器,仿真驗證了基于滑模轉速調節的直接轉矩容錯控制的可行性。
關鍵詞:PMSM;直接轉矩容錯控制;PI控制;滑模控制
中圖分類號:TP273.5 文獻標識碼:A
文章編號:1009-3044(2020)13-0239-03
1引言
文獻[2]提出了PR控制器的矢量解耦容錯控制算法,經驗證,該容錯控制算法能夠大幅降低兩相不對稱故障所帶來的轉矩脈動,算法能有效提高電驅動系統的可靠性。文獻提出了基于修正變量的任意兩相開相的直接轉矩控制容錯策略,仿真結果驗證了該容錯策略具有良好的響應速度和穩定性。文獻[6]設計了簡化控制集的模型預測電流控制,實驗驗證了該控制策略可以減輕計算的工作量,提高容錯驅動器的瞬態和穩態性能。
該文實現了基于滑模轉速調節的六相雙Y移30°PMSM直接轉矩容錯控制,通過切換開關表容錯算法,使電機恢復相對正常的運轉。此外,本文設計了一種新型趨近律下的滑模控制系統來替換傳統PI控制器,使得電機的動態性能與魯棒性能得到優化。
2直接轉矩容錯控制原理
直接轉矩容錯控制的思想概括為,在電機發生斷相故障后,原本電機所選擇的空間電壓矢量已經不再適合當前電機剩余健康相所形成的扇區,因此,為了實現電機的容錯控制,需要利用剩余健康相重新建立空間電壓矢量以適應剩余健康相所形成的扇區,最終使得電機磁鏈恢復為平滑的圓形,使缺相運行的電機恢復至相對正常的工作狀態。
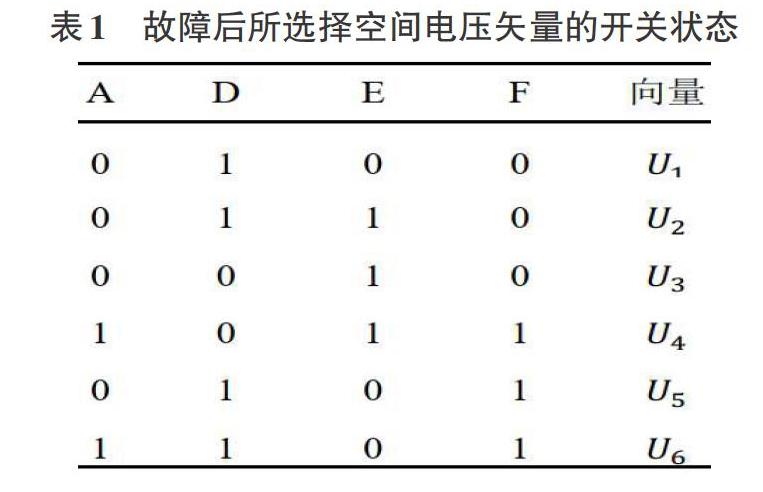
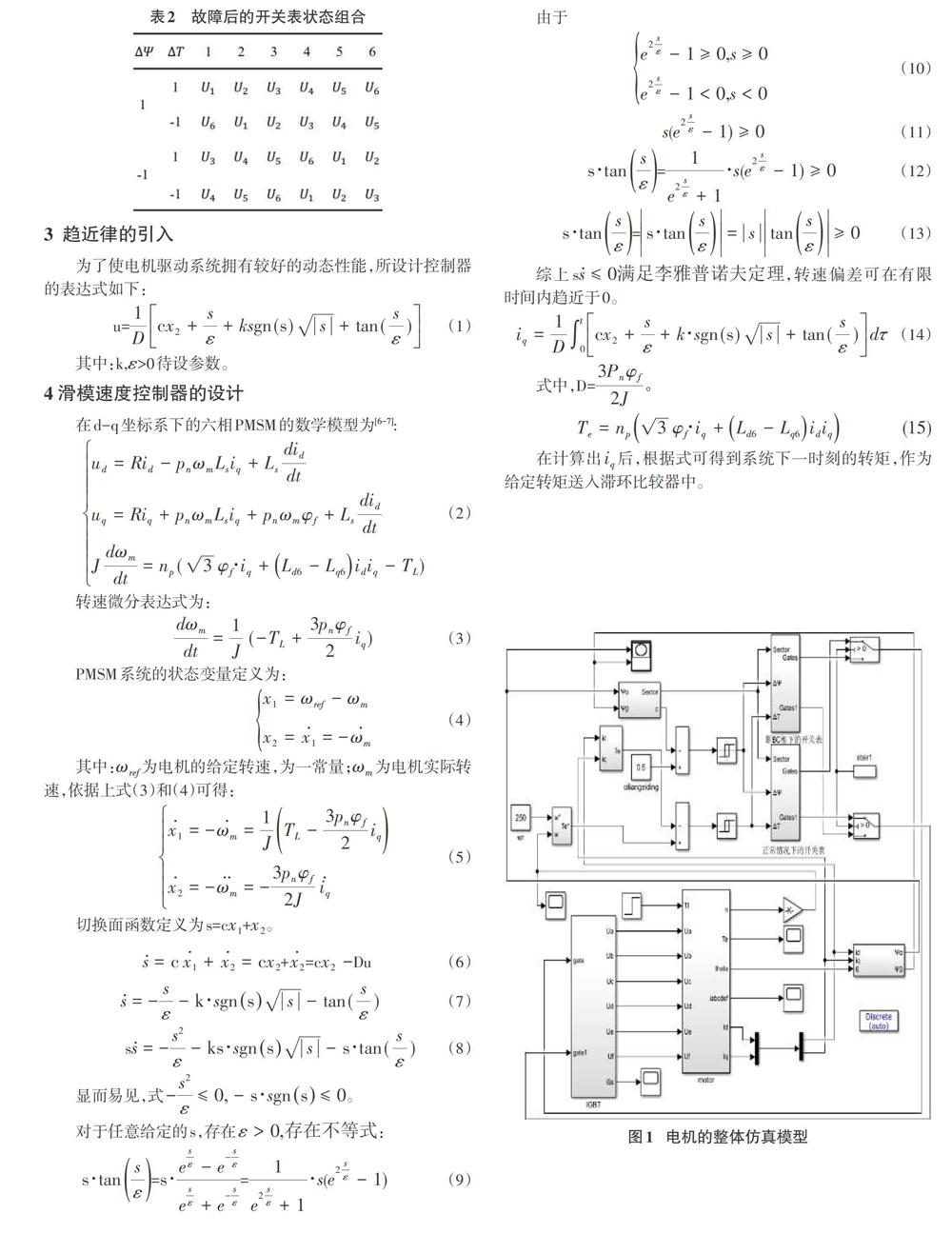
在BC相發生開路故障后,A、D、E、F相為電機的剩余健康相,共有16(24)個空間電壓矢量可選擇,因此,將整個工作扇區分切為6個扇區,在16個空間電壓矢量中,擇選出6個適合當前故障下的健康相,使電機恢復至相對正常的控制狀態。切換容錯算法后的空間電壓矢量開關選擇狀態如表1所示,實現容錯控制的內部開關表狀態組合如表2所示,表中的1,2,3,4,5,6表示為系統工作扇區。
圖3和圖4分別為電機在PI和SMC控制器作用下的整體轉速與轉矩對比分析圖,控制系統在0.2s增加一個25N.m的負載轉距,在0.3s發生斷相故障,在0.4s切換至容錯算法。
通過滑模控制器調節后的轉速的超調量控制的較小,當電機突加25N·m負載轉矩后,在滑模控制下的轉速下降幅度較小,且恢復至給定轉速的時間較短;容錯后的電機轉速超調較小,且轉速調節時間較短。通過滑模控制器調節后的電機驅動系統,經切換容錯算法后的轉矩相對快速地達到穩定且轉矩波動小。
6結論
通過上述仿真圖像對比可知,將轉速環上的PI控制器更換成滑模控制器后,電機各個輸出參數可達到很好的優化,可克服電機參數變化對實際控制的影響,增強電機控制系統的抗干擾能力,電機響應速度得到很大程度的提升。
