故障診斷算法的應用
2020-07-06 03:28:01高亞東周林
中國科技縱橫 2020年2期
高亞東 周林

摘 要:自動控制系統因設備故障發生故障停機時,將設備控制關聯各類控制信號出現的時間取出,該時間可以精確到PLC的某一個掃描周期,這樣在設備故障分析時,就能根據這些信號出現的先后順序判斷出設備故障是由哪個信號引起的,從而方便維護人員及時準確排除故障。
關鍵詞:停機;周期;時間順序;故障信號;聯鎖
中圖分類號:TP182 文獻標識碼:A 文章編號:1671-2064(2020)02-0020-20
0 引言
工業控制系統中,一條生產線有幾個甚至十幾個設備組成,每個設備有幾個聯鎖信號;如某個信號發生閃斷,可能造成整條生產線停機,有的還可能對其他生產線造成影響;信號的閃斷時間一般為毫秒級的,組態軟件采集周期為秒級的,很難采集到故障信息;而閃斷信號恢復正常后可正常啟動,很難找到故障點。如這種問題經常發生會給正常的生產造成很大影響,甚至嚴重影響生產指標的穩定。
一般的故障診斷方法為點檢人員巡回檢查,發現一些設備異常,這種方法受個人技術水平影響大,耗費人力,而且好多問題通過肉眼觀察不到;一些智能設備如變頻、軟啟只是測限幅,過載,接地等主回路故障,不能檢測控制回路信號故障;現在還沒有對整個生產線所有設備作為一個整體,考慮各設備間連鎖關系的故障檢測方法。
1 總體思路
通過實時采集設備信號,將信號動作時間鎖存,時間以“時-分-秒-周期”格式存儲。信號采集分三種形式:一是通過搭建邏輯屏蔽由于其他設備停機導致的本設備連鎖停機和工控畫面正常操作停機導致的信號動作,只記錄由于故障導致的信號動作,通過取出的信號動作時間先后順序判斷由于哪個信號導致的停機事故,信號的清除可以是手動清除也可以是到本班結束時清除,如不清除信號再次來不更新;二是只要設備信號動作就將動作時間記錄下來,新的代替舊的;三是設備信號動作時間記錄后十分鐘內(可根據實際情況設定)再次動作不更新,十分鐘后再次動作用新的信號動作時間代替舊的。
2 技術方案
如一個信號故障引起設備停機,則這個設備的其他信號如接觸器、抱閘接觸器吸合,變頻器運行等信號連鎖動作,而這些信號動作時間間隔在1秒以內,所以如果將動作時間精確到秒,不能分出動作的先后順序,所以必須將時間精度提高。
PLC是采用“循環掃描,順序執行”的工作方式。PLC的一個掃描周期分刷新輸入映像區、程序執行和刷新輸出映像區三個階段。在刷新輸入映像區時采集到的故障信號,在程序執行階段引起輸出的動作,而在刷新輸出影像區時引起的如變頻器,接觸器等外部控制設備的動作,動作的反饋信號必定在下一個或下幾個掃描周期后才能被采集,將時間精確到掃描周期必定能分出信號發生的先后順序,從而判斷設備停機的故障原因。
以每個設備為獨立單元,將這個設備所有信號采集,信號動作時將時間記錄下來,精確到掃描周期,通過比較動作時間順序,可快速確定停機原因,縮短故障處理時間。有時雖未發生停機事故,而發現程序采集到了故障信號,則這個信號的閃斷時間極短,未造成停機,這種情況在啟保停控制設備中時有發生;針對這種情況可以在停機時處理避免設備事故。
在連續生產線上一個設備的停機可能引起數十個設備的停機,如將所有停機設備的動作信號都記錄下來則記錄的信息可能有數百條,進行故障原因分析時增加了難度,延長了事故的處理時間。通過搭建邏輯屏蔽由于其他設備停機導致的本設備連鎖停機和工控畫面正常操作停機導致的信號動作,只記錄出問題設備信號動作,其上游設備由于本設備聯鎖停機,其信號動作時間不記實錄,這樣就將故障定位到某個設備的某個信號,定位精確、容易查找。如因操作人員誤操作停機,則只記錄操作信號的觸發時間,可通過和操作人員溝通確認停機原因,避免失誤再次發生,同時避免設備維護人員盲目查找故障原因付出的勞動。
搭建邏輯屏蔽由于其他設備停機導致本設備連鎖停機而引發的連鎖信號動作和正常操作停機引發的本設備信號動作通過如下方法實現。
當設備發生故障停機時首先時判斷:(1)由于其他設備停機導致的本設備連鎖動作停機;(2)操作人員正常操作停機導致本設備信號動作;(3)由于本設備有問題導致信號動作。
如原因1導致本設備連鎖停機則不做記錄,如因原因2導致的本設備停機則只記錄操作信號動作時間,如原因3導致設備停機則記錄故障信號動作時間和由于故障信號動作導致本設備的其它信號連鎖動作時間;其它由這個設備引起的停機屬于情況1。
3實例分析
下面是比較有代表性的事故案例,做一下詳細分析,圖中輸入、輸出名稱一一對應,如輸入KA1對應QKA1。
上圖1為設備Z11故障停機時程序截圖,Sel引腳為1屬于上述第二種形式,在信息清除,前新的故障停機信號不再檢測。Z11為傳送皮帶,其聯鎖信號由Z11KA1:遠程信號,Z11KM:接觸器吸合信號,Z11KMB:抱閘接觸器吸合信號,LATP:拉繩信號,Z11RQBT:軟起動器備妥信號,Z11RQGZ:軟起動器故障信號,Z11K:Z11設備啟動信號(為PLC軟點),NEXT:Z11皮帶下游設備運行信號,Z11K0:Z11啟動繼電器吸合信號;V_Work、Z11Lxk、V_Quit、V_STX為系統停機信號。從截圖信號動作時間順序分析,接觸器吸合信號QKM、軟啟動點QK釋放時間為02:55:13:005(凌晨兩點五十五分十三秒第5個掃描周期),兩個掃描周期后02:55:13:007繼電器觸點QJDQ1、抱閘觸點QKMB動作;由此分析為Z11接觸器輔助觸點故障導致的停機,輸入JDQ2接的為啟動繼電器反點,記錄繼電器吸合時間,02:55:38:002 QJDQ2、RQBT信號動作,說明在設備停機15秒2個周期后設備再次啟動。此圖是在03:07:42:010抓取的,即停機后的12分鐘查出的設備原因,中間包括操作人員和設備維護人員溝通和到主控室路上時間。
某一設備停機后已經啟動,維護人員還沒來得及調出程序再次發生故障停機,如沒有將原來信號動作時間信息清除,則無法就檢測到最新的故障信息;本方法的第二種形式為只要信號動作就用新的動作時間代替舊的,如果設備停機后,其聯鎖信號再動作則不記錄,只記錄停機過程中設備信號的聯鎖動作,防止停機后有其它操作導致信號不統一,給問題分析制造障礙。圖2為皮帶機S5故障停機時程序截圖,Sel引腳為2屬于第三種形式,22:15:13:006 S5拉繩接入PLC信號松動,2個周期后22:15:13:008啟動繼電器S5K0釋放,接觸器KM在同一個周期釋放。如為現場拉繩開關動作會導致S5控制回路斷電,則拉繩LATP、接觸器KM、遠程KA1、輸出軟點K同時動作,本次事故遠程信號沒動作,拉繩信號動作比接觸器、啟動繼電器早兩個周期,依此判斷為拉繩接入PLC信號松動導致的停機。
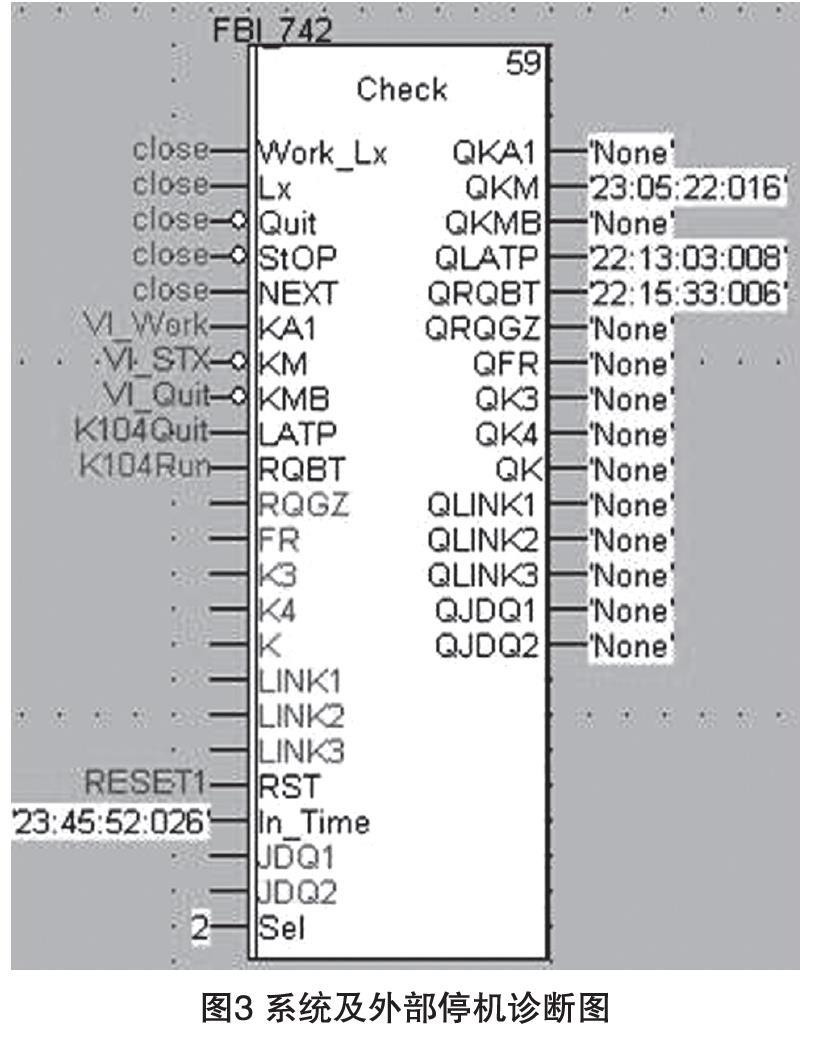
上圖3為檢測系統操作信號和外系統信號動作時間截圖,K104皮帶機為本系統下游設備,屬于另一控制系統設備,22:13:03:008 K104急停信號K104Quit觸發本系統上游設備停機,22:15:33:006 K104皮帶運行(K104Run),也就是說K104皮帶在停機2分30秒后啟動,本系統上游設備可啟動。23:05:22:016 VI_STX生產線順序停止,為操作人員根據工藝要求停止。如因操作人員誤操作引起的設備停機通過程序記錄的信息可以佐證。
通過這三套程序結合著看可以查出絕大部分故障問題。
4 結論
此方法在不增加硬件投資的情況下可快速定位設備故障點,縮短了故障排除時間,提高了生產效率,特別是在離散量控制領域值得推廣。
