探測深海富鈷結殼厚度的參量陣聲吶系統關鍵技術研究
2020-07-07 06:26:36馮海泓任曉寰黃敏燕楊震亞
聲學技術 2020年3期
馮海泓,任曉寰,2,黃敏燕,楊震亞
(1.中國科學院聲學研究所東海研究站,上海201815;2.中國科學院大學,北京100049)
0 引 言
富鈷結殼又稱鈷結殼、鐵錳結殼,是生長在深海海山上的殼狀礦床。礦石中鈷的品位最高達1.2%,是多金屬結殼中鈷含量的4倍,高出陸地原生鈷礦幾十倍[1],因而名為富鈷結殼;同時含有鈦、鈰、鎳、鋯和稀土等多種金屬元素,是一種開發價值較大的戰略資源。然而,結殼的分布十分不均勻,厚度通常在10~250 mm之間變化[2]。到目前為止,測量結殼厚度最準確的方法是通過巖心取樣。這種方式雖然可靠性好,但單個點采樣效率低,不利于對結殼區厚度進行大范圍探測。
目前,淺地層剖面儀、測深側掃系統、多波束系統、三維(3D)海底成像系統等聲學探測系統已經成功應用于富鈷結殼資源的探測和識別,但是尚未開展結殼厚度測量研究。對于結殼厚度的測量問題,常規探測系統對于較薄的結殼層來說分辨率欠佳[3],針對該問題,本文提出了一種對富鈷結殼進行聲學原位探測的測量系統。該系統利用參量陣技術發射探測信號,通過對結殼上下表面的回波到達時刻進行估計,實現了結殼厚度的估計。
1 探測系統原理
由聲學原理可知,在介質聲阻抗發生改變的邊界處存在聲反射現象。鈷結殼的聲阻抗在5.6×106kg·m-2·s-1左右;基巖的類型較多,主要以玄武巖為主,聲阻抗約為16.6×106kg·m-2·s-1[2],可見,結殼的聲阻抗與基巖存在明顯差異。因此,如果結殼內部的聲速已知,那么結殼-水界面和結殼-基巖界面處會發生聲反射,通過測量結殼上下表面反射波的到達時間,可以計算出結殼的厚度。
參量陣聲吶設備體積小、指向性高,而且差頻聲束無旁瓣,能夠避免引入虛假地層,多用于全海域地形地貌測量[4]。Westervelt最早提出了參量陣理論[5],他僅考慮兩個單頻信號共軸發射的情況,產生的差頻波只有一個頻率成分,通常稱為雙頻參量陣。Berktay等在其基礎上研究了輸入信號為寬帶信號的情況,提出幅度調制的方法,使得參量陣技術進一步得到了發展[6]。
寬帶參量陣理論中,假設發射信號為

式中:p0是原頻波的振幅;E(t)是原頻的包絡,通常是一個寬帶信號,則遠場聲軸上的差頻聲壓為[3]

式中:ρ0是介質的密度;β是非線性系數;t為時間;α0是原頻的吸收系數;c0是介質中的聲速;R是場點到聲源的距離;s為發射換能器的面積。式(2)表明,經過介質的自解調后,寬帶聲參量陣得到的差頻波的聲壓和原頻包絡平方的兩次微分成正比。
參量陣體積小,指向性好,但存在轉換效率低的問題。參量陣的轉換效率與差頻波和原頻波的頻率比、原頻的輻射功率、傳輸介質特性[7]以及包絡調制方式[8]等因素有關,通常只有1%左右[9]。因此入射到結殼內部的差頻波的聲壓級較小,而且,由于結殼表面粗糙,引起聲波的散射和折射,故結殼與基巖界面的回波很容易淹沒在噪聲中難以提取。
為了減少噪聲和干擾對回波的影響,系統在兩個接收通道分別加入6階巴特沃斯型濾波器。濾波器的中心頻率分別為1 MHz和100 kHz,通帶帶寬分別為200 kHz和20 kHz,阻帶衰減為80 dB,以減少噪聲和干擾對回波信號的影響。
1.1 回波多脈沖疊加
當系統搭載平臺定點作業或運動速度較慢時,多個周期的回波可以認為是某點的多次測量結果,將某一時間段內的多個回波脈沖信號進行疊加,利用信號之間的相關性和噪聲之間的不相關性,可以增加信號的強度[10],使得淹沒在噪聲里的回波信號凸顯出來,從而提高信噪比。
假設在某次定點探測中,換能器接收的回波信號為

對N個周期的回波信號進行疊加后的結果為

式中,n(t)為噪聲,s(t)為信號。假設輸入信號功率為,輸入噪聲方差為,且各個噪聲之間是相互獨立的,則N次疊加后的噪聲方差為,由于信號是相關的,則疊加后的信號功率是。因此,理想情況下疊加后的信噪比為

由此可見,理想情況下N個回波信號疊加后的信噪比相比單個脈沖情況下提高了 10lgNdB。故疊加脈沖數越多,信噪比提高得越多。這在定點測試中是比較容易實現的,測量設備處于靜止狀態,可以將多個周期的回波信號進行疊加。但在走航式作業情況下,測量平臺快速航行或者處于運動狀態下,多個脈沖可能來自不同的探測位置,多個反射波之間的相關性有所減弱,該方法則不適用。
下面給出某次定點探測實驗中,回波多脈沖疊加的結果。將10幀信號進行疊加,單次回波信號和疊加后的信號如圖1所示。經計算多脈沖疊加后的原頻信號信噪比相對單幀信號平均提高了6.2 dB,多脈沖疊加后的差頻信號信噪比相對單幀信號平均提高了6.8 dB。
1.2 雙頻時延估計
假設結殼中的聲速已知,對水-結殼界面和結殼基巖界面的回波到達時間分別進行估計,通過計算兩者的時延差可以計算出此處結殼的厚度。信號的包絡包含了到達時間的信息,利用包絡信號來估計到達時間已成功應用于目標的定位和測量中[11],故對疊加后的回波信號取包絡信號,再利用包絡信號估計回波的到達時刻。
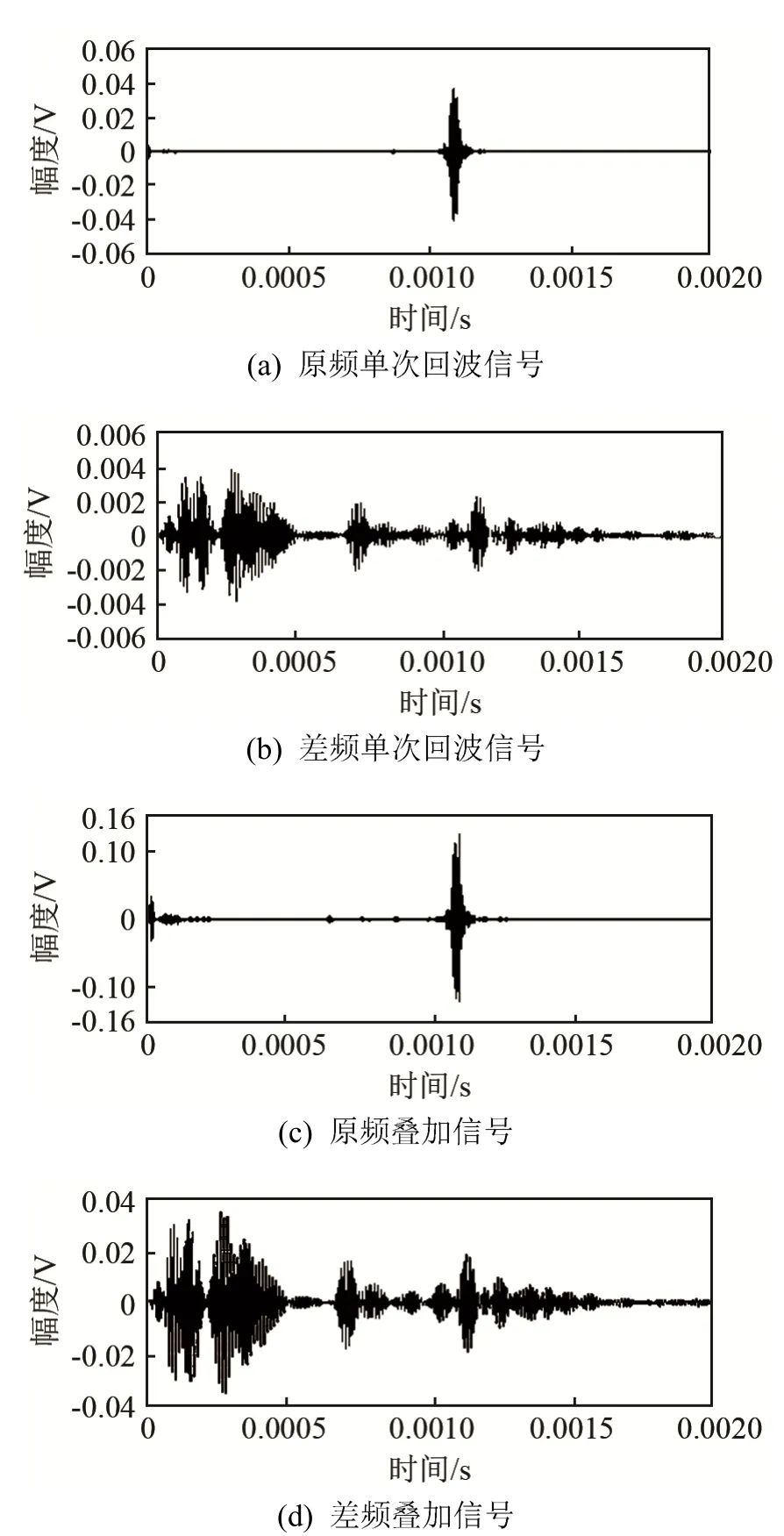
圖1 單次回波信號和疊加10次后的回波信號對比圖Fig.1 Comparison of single echo signal and the echo signal after 10 times superposition
探測系統發射的信號為大功率原頻波,由于是在近距離(距離結殼層0.5~1 m處)對結殼進行測量,而且水中原頻波的吸收系數比較小(約為0.26 dB·m-1),故原頻波的回波幅度較大。相關研究指出[2],結殼層中的聲吸收系數約為(6.37±1.8) dB·MHz-1·cm-1,由于結殼層的衰減效應,結殼-基巖界面的原頻反射波已經難以被接收端檢測到。考慮差頻波入射的情況,由于頻率較低,差頻波在結殼層中的衰減要小于原頻波,能夠穿透結殼層[2]反射回接收端,但是受到轉換效率低的制約,回波幅度較小。原頻和差頻的回波信號如圖2所示。
從圖2中可見,結殼上表面的回波信號到達接收機大約在0.001 1 s左右,從原頻回波信號中比較容易確定這一點,但是差頻回波信號受到外界干擾的影響,難以直接從信號包絡中確定結殼上表面以及下表面的回波到達時間(見圖2(b))。故借鑒超聲雙頻組合利用[12]的思想,提出一種雙頻延時估計方法。該方法首先利用幅度較大的原頻波確定結殼上表面回波的到達時刻,然后利用穿透性較好的差頻波確定結殼下表面的回波到達時刻,通過計算兩個回波到達的時延差,從而估計出結殼層厚度。
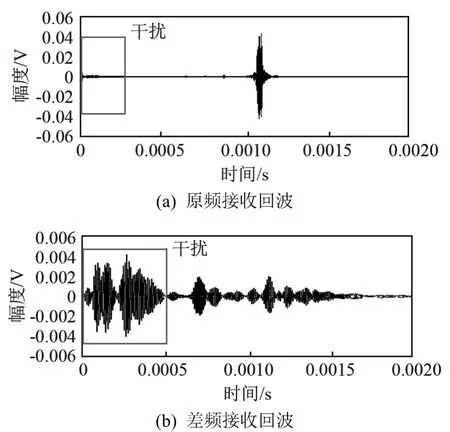
圖2 原頻和差頻的回波信號Fig.2 Primary frequency and difference frequency echo signals
采用雙通道延時估計方法測量結殼厚度的軟件流程圖如圖3所示。在接收差頻回波的同時,系統接收原頻波的反射回波,根據原頻波的包絡信號可以確定結殼上表面回波的到達時刻,結殼-基巖層界面回波的到達時刻可以通過對差頻回波信號進行處理,采用峰值檢測的方法進行確定。

圖3 結殼厚度測量流程圖Fig.3 Flow chart of crust thickness measurement
2 探測系統組成
系統基陣采用球形凹面陣設計。陣面曲率半徑為750 mm,球缺底面直徑為230 mm,陣面環形排布24個發射通道,發射采用幅度調制方式,原頻波頻率為 1 MHz,差頻波頻率為 100 kHz,發射聲壓級為220 dB,陣元瞬時功率可達250 W,產生的差頻波聲壓級約為186 dB。陣面中心位置安裝兩個接收通道,分別接收原頻回波和差頻回波,采樣率分別為5 MHz和500 kHz。
系統硬件系統由主控板、信號調理采集板、功放板和底板組成。主控板是基于NI公司SbRio-9607采集模塊開發的,實現系統遠程控制及數據傳輸、發射信號相控以及信號發射和接收。
系統軟件分為顯控軟件模塊和水下控制軟件模塊顯控軟件模塊為操作者進行聲學測量提供參數輸入窗口,實時顯示設備的工作狀態,以及測量過程中的波形圖、趨勢圖等;水下控制軟件模塊主要負責數據采集控制和數據轉換功能,和主控計算機之間的通信選用傳輸控制(transmission control protocol, TCP)協議,以保證數據傳輸的安全性和可靠性。
系統軟件采用客戶機-服務器的模式。水下控制軟件作為服務器方,負責創建通信端口,并偵聽請求;當客戶端(主控機)提出連接請求時,服務器端響應連接,建立起安全可靠的連接。
3 系統性能測試及應用
系統完整的工作流程為:載體下潛過程中打開噪聲采集模塊,采集海洋環境噪聲。到達海底探測區域后,主控計算機發出控制指令,啟動聲波發射采集模塊工作;聲波發射模塊中的功放板生成設計好的脈沖波形,將信號放大并發送給發射換能器;發射換能器產生周期性的探測脈沖。聲波采集模塊同步開始工作,接收和處理來自接收換能器的信號,并把波形和計算結果實時顯示在主控計算機上。
圖4給出了系統探測過程中某一站點顯控軟件的部分結果圖。圖4(a)、4(b)給出了高頻通道和低頻通道接收回波多脈沖疊加后的原始波形,圖4(c)、4(d)是對應的包絡信號,圖4(e)、4(f)給出了結殼厚度和離底高度的估計值。
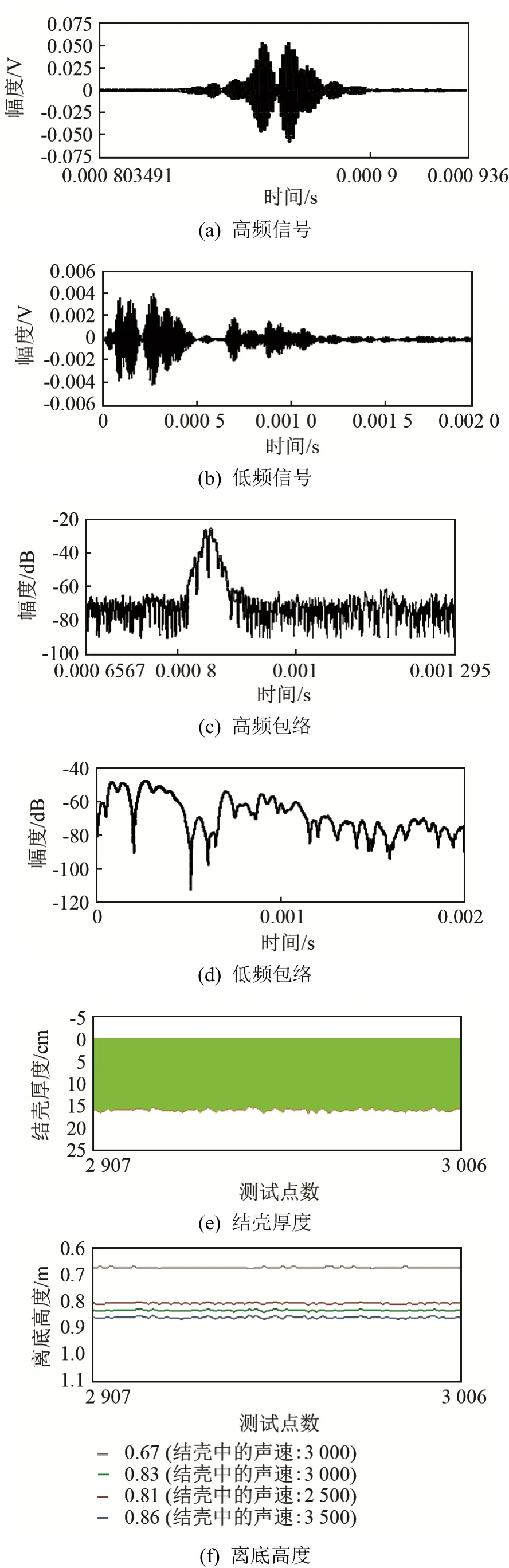
圖4 探測系統顯控軟件結果圖Fig.4 Processing results of display-control software of detection system
經分析可知,0~0.000 5 s(圖 4(b))的信號是外界的干擾信號,從圖4(b)中可以看出,雖然引入了回波多脈沖疊加技術抑制噪聲,相對原頻回波信號,差頻回波的幅度仍小于干擾信號的幅度,若直接對包絡信號進行峰值檢測,會得到錯誤的結果。而采用雙通道延時估計方法,可以從原頻回波的到達時刻確定差頻波的直達回波到達時刻,從而避開之前干擾信號的影響,準確地確定前表面和后表面的回波到達時刻。假設結殼聲速均勻不變的前提下,系統可以給出結殼的厚度變化趨勢。
對于結殼層厚度的計算,系統中選取的結殼中的聲速為2 500 m·s-1,相應地計算得到該站點的結殼厚度為14 cm。潛器搭載有遙控無人潛水器鉆機,在該站位成功地鉆取到巖芯樣品,揭示了探查站位點富鈷結殼的真實厚度,此站點的結殼厚度約為15 cm。通過與巖心樣品測量結果比對,厚度測試結果較為接近,說明本系統時延估計精度較高,對富鈷結殼的厚度計算結果是準確的。
4 結 論
本文研究和分析了富鈷結殼原位探測系統的探測原理,對系統架構和主要模塊進行了介紹,并著重分析了富鈷結殼厚度原位探測過程中的關鍵技術。探測系統搭載潛器進行了出海試驗。試驗期間系統工作正常,性能較為穩定。試驗結果驗證了測厚算法的性能,對富鈷結殼探測設備的研發具有一定的參考價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
