高速環道幾何線形設計與舒適度評價
2020-07-08 07:02:56林巧飛
山西交通科技 2020年2期
林巧飛
(上海市政工程設計研究總院(集團)有限公司,上海 200092)
高速環道是汽車試驗場的核心試驗道路,其幾何線形研究一直是設計師重點關注的問題。平面線形大都由直線、圓曲線和緩和曲線組成。高速環道的幾何線形研究需要從平縱橫三方面進行綜合設計,有機組合。最后,應檢驗高速環道的舒適度指標,進行舒適度評價,必要時予以修正。
1 高速環道幾何線形設計
在高速環道直線和平曲線幾何設計中,緩和曲線的幾何設計是高速環道建設成敗的關鍵。常用有回旋線設計法、布勞斯設計法和麥克康奈爾設計法3種,其差異在于其緩和曲線設計方法的不同。
麥克康奈爾曲線直接以人體對運動的敏感度作為道路的幾何設計準則,并從車輛在緩和曲線上高速行駛時的允許最大側擺加速度變化率出發,推導出緩和曲線設計的系列公式。因麥克康奈爾曲線以敏感閾限為標準,進行平面緩和曲線與豎曲線設計,更多地考慮了人體的舒適度,在國內眾多汽車試驗場高速環道中得到廣泛應用。
1.1 平面設計
高速環道平面設計流程如下:
a)步驟1 根據場地大小、試驗速度要求和路面最大超高值等確定一個合理的圓曲線半徑值。依據平衡速度的概念,假定路面橫向摩阻力為零,由力學平衡條件i=v2/gr可以計算得出圓曲線半徑。
b)步驟2 根據場地大小和試驗要求確定合理的直線段長度,直線段長度應保證一定的連續長度。
c)步驟3 最后設計一條連接直線和圓曲線的緩和曲線。緩和曲線的設計重點是推導出一條從直線到曲線含超高的螺旋緩和曲線,使人體感覺不到所包含的角運動和線運動的存在。
d)步驟4 計算緩和曲線上各點的側擺角,求出緩和曲線各樁號點的路面橫向超高和橫坡,得出相應的曲率半徑。利用支距法求出緩和曲線各點的平面坐標和偏角,編制程序計算和繪圖,完成緩和曲線設計[1]。
圖1是國內已建汽車試驗場的高速環道,呈長橢圓狀,由兩段直線段、兩段圓曲線和四段緩和曲線組成,總長9.036 km,圓曲線半徑為670 m,設計車速為220 km/h。緩和曲線設計采用麥克康奈爾設計法,按照側擺角加速度變化率2°/s進行反算緩和曲線長度,確定緩和曲線長度為480 m。高環平面線形設計以第四車道中心線為設計基準線。
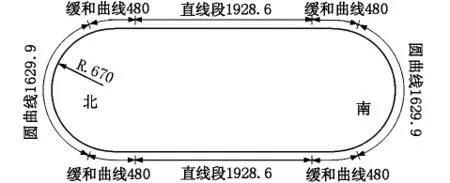
圖1 高速環道平面布置示意圖(單位:m)
1.2 橫斷面設計
高速環道曲線段橫斷面通常采用曲線型式,使橫坡可以連續變化,適應不同位置的平衡速度要求,滿足多車道不同車速要求。
在該試驗場工程實例中,采用三次拋物線路面+直線段安全帶的組合斷面形式。橫斷面圖見圖2和圖3。
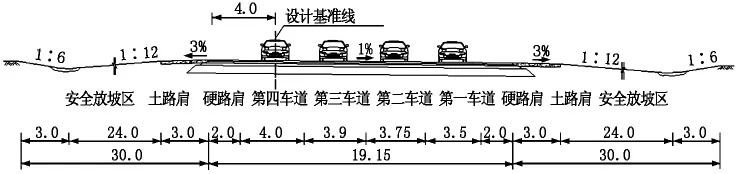
圖2 高速環道直線段橫斷面
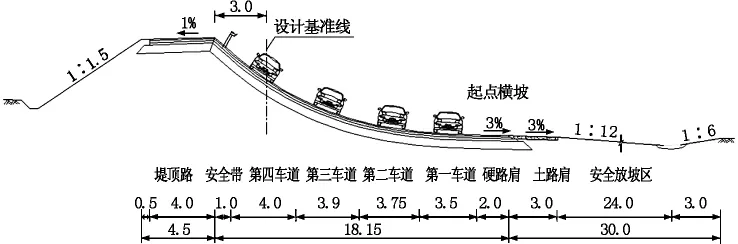
圖3 高速環道曲線段橫斷面
1.3 縱斷面設計
縱斷面設計基線的選擇,通常做法是路面內側邊緣保持固定,各車道行車線沿著緩和曲線逐漸爬升,利用橫斷面曲線方程求解橫斷面上各點高程。
在該汽車試驗場高速環道縱斷面設計中,根據場地“南低北高”的特點,直線段采用0.5%的縱坡,北端曲線段采用疊加0.5%縱坡的方案,南端曲線段在進入緩和曲線段之前由0.5%的縱坡變為0%,如圖4和圖5。

圖4 北端緩和曲線縱斷面設計線(內側車道邊緣為基準線)

圖5 南端緩和曲線縱斷面設計線(第三車道中心線為基準線)
2 行車舒適度指標分析
2.1 高速環道幾何設計方法的評價指標
高速環道幾何設計是為使用者提供一個安全、可靠和舒適的道路條件。以車輛行駛過程中乘員的舒適性指標作為高速環道幾何設計的評價指標。
當車輛在小半徑曲線上高速行駛時,它的6個運動自由度(即縱、橫、豎3個方向的直線運動和偏向、側擺、縱擺3個角度的旋轉運動)都處在不斷的變化之中,并直接影響到乘員的行駛安全性和舒適性。研究表明,只有當這些力或力的變化達到人體感覺開始極限值時,人體才會感覺到。麥克康奈爾通過大量試驗找出了人體對各個運動自由度的感覺開始極限值,表1是指人體產生感覺的限度[2]。
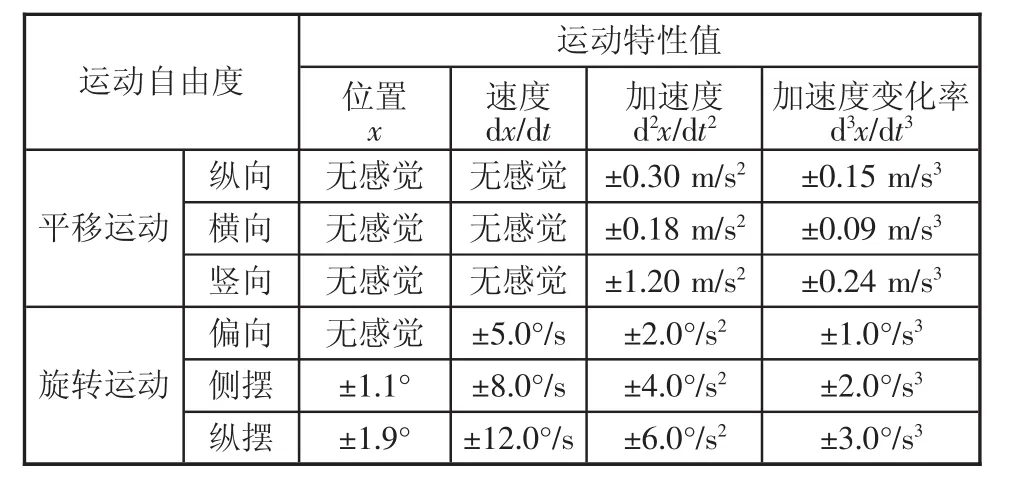
表1 人體對運動的感覺開始極限值
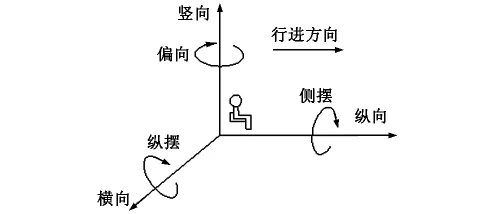
圖6 6個運動自由度示意圖
因此,高速環道幾何設計時,如果能使各個運動自由度的特性值都控制在人體對運動的感覺開始極限值以內,則車輛的行駛舒適性良好。
6個運動自由度中,以對側擺運動的變化最為敏感。目前汽車試驗場高速環道設計通常將側擺加速度變化率作為設計控制指標,其他自由度則作為驗算指標。
2.2 高速環道幾何設計的舒適度評價
假定行駛車輛沿道路設計基準線勻速行駛,設計車速220 km/h,則橫向和縱向運動特征值可以不予考慮。應著重分析側擺、偏向和豎向運動特征。
2.2.1 側擺運動特性分析
麥克康奈爾認為:如果在進行高速環道的幾何設計時將側擺運動的特性值控制在人體對運動的感覺開始極限值內,則其他各運動自由度也能保持在感覺開始極限值以內,從而不會影響行車舒適性。
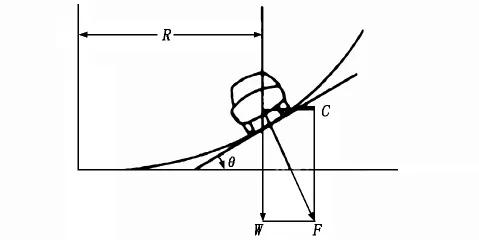
圖7 車輛在曲線斷面受力示意圖
車輛在緩和曲線上行駛時,隨著設計線超高角不斷變大,其側擺角相應改變,超高角的變化即為側擺角的變化。該試驗場高速環道緩和曲線段橫斷面起點橫坡由直線段的1%漸變至圓曲線段的3%,漸變段為整個緩和曲線段,長度480 m。計算相應側擺特征值時應考慮起點橫坡的變化。
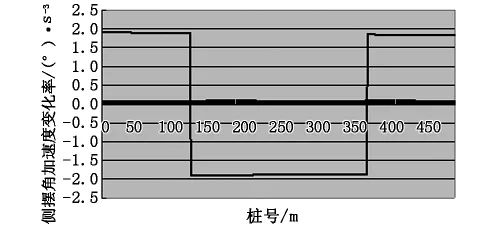
圖8 側擺角加速度變化率分布
由于橫斷面初始橫坡的變化,側擺角加速度變化率J并不為恒定值,其最大值為1.92。由圖8可知,側擺角加速度變化率J的變化范圍很小,小于麥克康奈爾提出的側擺加速度變化率控制指標2°/s。因此,側擺運動指標滿足設計要求。
2.2.2 偏向運動特性分析
式中:dθ/dt=dφ/dt=ω為麥克康奈爾曲線的側擺角速度。
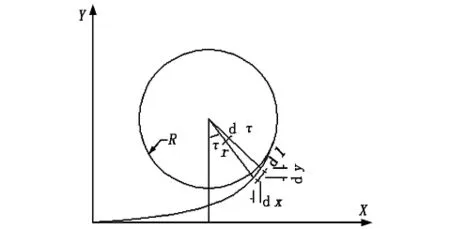
圖9 車輛在緩和曲線平面位置變化示意圖
計算得到的偏向角速度小于±5.0°/s,偏向角加速度小于±2.0°/s2,舒適度指標滿足設計要求,如圖10和圖11。
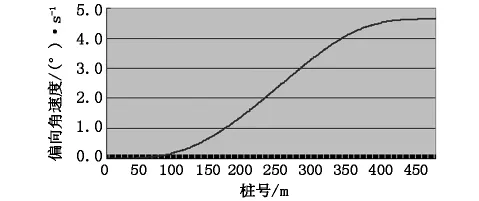
圖10 偏向角速度分布
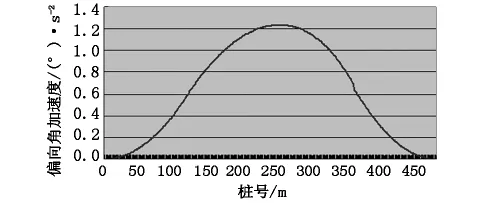
圖11 偏向角加速度分布
2.2.3 豎向運動特性分析
2.2.3.1 北端緩和曲線
高速環道北端緩和曲線以路面內側邊緣線為標高設計基準線,北端緩和曲線疊加了0.5%縱坡,因此內側邊緣線縱向坡度為0.5%,其余車道設計線沿橫斷面逐漸抬高。
北端緩和曲線以第四車道中心線為設計線,設計高程沿緩和曲線縱向抬高值為5.314 m,其中包括0.5%縱坡疊加的部分和緩和曲線自然抬高部分。經檢驗豎向加速度變化率峰值為0.257 m/s3,略大于0.24 m/s3的運動開始感覺極限值。考慮到峰值出現范圍僅120 m,占緩和曲線全長的1/4,而其余部分特征值均小于0.24 m/s3。因此,北端緩和曲線的豎向運動指標滿足麥克康奈爾設計法要求。
2.2.3.2 南端緩和曲線
高速環道南端緩和曲線以第三車道中心線為標高設計基準線,緩和曲線段標高設計基準線上縱坡為0,道路設計基準線為第四車道中心線,橫斷面上第三車道外側標高沿橫向逐漸上升,內側標高沿橫向逐漸下降。第四車道中心線標高是根據各橫斷面相應高程銜接而成,南端緩和曲線第四車道中心線標高的連續性經檢驗出現“跳躍點”。由于南端緩和曲線以第三車道中心線為設計基準線,第四車道中心線與第三車道中心線高差相對值不變。因此第四車道縱斷面自然形成產生一定“扭曲”,需要對其進行修正,如圖12。
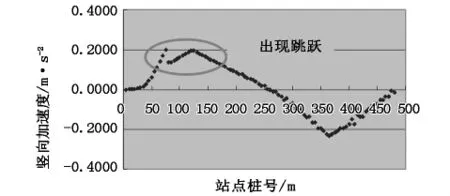
圖12 南端緩和曲線第四車道中心線豎向加速度
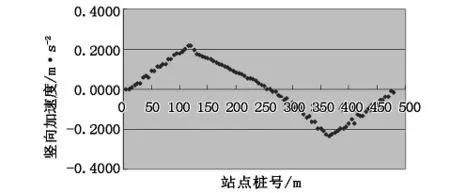
圖13 南端緩和曲線第四車道中心線豎向加速度(修正后)
緩和曲線數據調整思路為改變縱斷面和橫斷面設計順序,先在擬合的縱斷面曲線上進行緩和曲線縱斷面設計,再將各個站點的橫斷面放在縱斷面設計線上,對設計線舒適度指標進行驗證,并對橫斷面上其他車道的縱斷面設計線進行數據驗證。
修正后南端緩和曲線第四車道中心線豎向加速度分布較修正前連續性得到提高,如圖13。
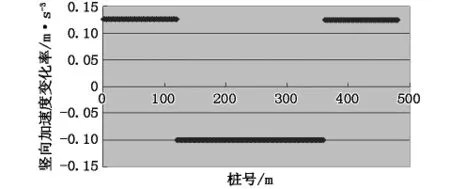
圖14 南端緩和曲線第四車道中心線豎向加速度變化率(修正后)
修正后南端緩和曲線第四車道中心線豎向加速度變化率峰值為0.127 m/s3,小于0.24 m/s3的運動開始感覺極限值,如圖14。因此,修正后的南端緩和曲線的豎向運動指標滿足麥克康奈爾設計法的要求。
3 結語
本文通過汽車試驗場工程實例,介紹了高速環道幾何線形設計的方法和步驟。在此基礎上,提出高速環道幾何線形評價指標,并進行檢驗。若某項指標超出閾限值,行車舒適度不滿足要求,則予以修正。
本工程實例緩和曲線設計經檢驗,行車舒適度主要控制指標側擺角加速度變化率J<2,能夠滿足麥克康奈爾緩和曲線設計法的要求。南端緩和曲線豎向運動指標在進行相應修正設計后亦滿足麥克康奈爾緩和曲線舒適度指標的要求。
猜你喜歡
建材發展導向(2022年3期)2022-04-19 12:51:06
紡織科學研究(2021年9期)2021-10-14 08:52:12
鐵道通信信號(2020年1期)2020-09-21 08:55:16
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
成都信息工程大學學報(2018年3期)2018-08-29 01:08:52
藝術啟蒙(2018年7期)2018-08-23 09:14:18
浙江工業大學學報(2017年5期)2018-01-22 02:03:36
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16