關于降低雨天TEDS故障自動識別誤報警的研究
2020-07-12 11:45:53李卓亮
運輸經理世界 2020年7期
文/李卓亮
1 前言
動車組運行故障動態圖像檢測系統(TEDS)在對動車組行駛安全方面及其重要,是不可或缺的一種輔助設備。它是利用軌邊的高清攝像機拍攝動車的各個部分,通過圖像自動識別技術盡早發現異常情況,避免危險情況發生。研究發現TEDS 監控設備在雨天氣候下誤報警急劇增加,主要原因為圖像的質量問題,具體表現在圖像中存在較多的“橫道子”。本文研究的主要內容便是去除“橫道子”,修復圖像。
2 方法設計
2.1 總體流程
本文采用了多種圖像處理算法組合的方法修復圖像。
圖1 為圖像修復的總體算法流程:
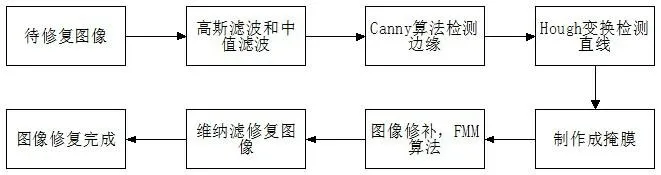
圖1 圖像修復的總體流程
2.2 具體方法
2.2.1 采用Canny算法得到邊緣圖像。Canny算法具有較好的信噪比和較高的定位性能,此算法分為以下幾個步驟:高斯模糊去除噪聲、計算圖像梯度并得到幅值和方向、非極大值抑制保留灰度變化最大區域以及雙閾值篩選出強的邊緣點。
當使用高斯濾波平滑圖像時,本文加入了亮度控制函數,令Sbright(x,y)表示亮度函數,f(x,y)表示輸入圖像,G(x,y)表示二維高斯函數,fs(x,y)為卷積平滑后的圖像,Vpixel(x,y)表示圖像某點的灰度值,x和y分別為二維圖像的橫縱坐標。得到如下式:
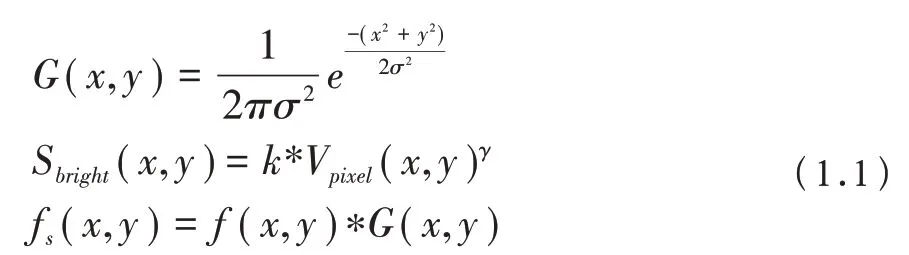
其中,σ高斯函數的標準差,k和γ為常數。
2.2.2 采用霍夫變換檢測直線,去除圖中“橫道子”,霍夫變換就是把圖像空間中的直線變換到參數空間中的點,通過統計來解決檢測問題。然后篩選水平直線,用白色線條標記檢測,做成掩膜以便于后續使用。如圖2 所示,霍夫檢測到的直線圖像(左)和掩膜圖像(右)。
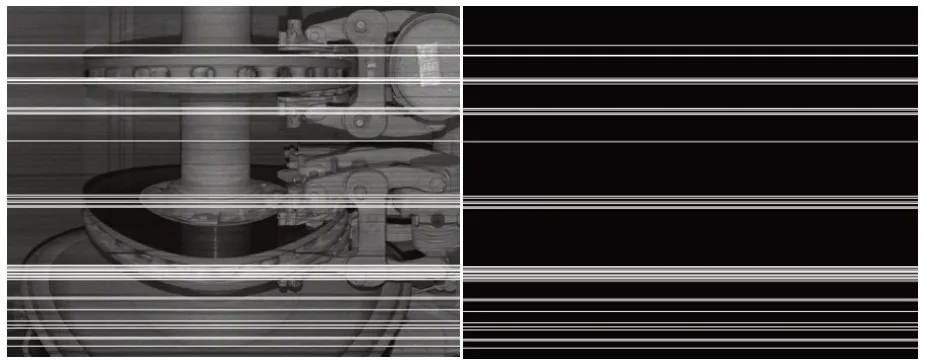
圖2 霍夫檢測直線圖像
2.2.3 圖像修復就是對圖像上信息缺損區域進行信息填充的過程,為了對有信息缺損的圖像進行復原,使觀察者無法察覺到圖像曾經缺損或者已經修復[1]。本文采用基于圖像分解的修復方法,利用圖像中“橫道子”的邊緣信息去修復圖像。
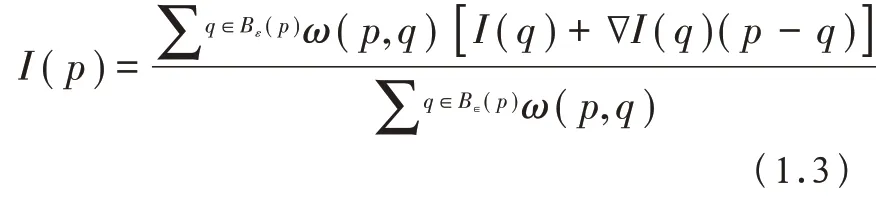
假設待修復區域的某點p是我們要修復的像素,以p為中心選取一個ε大小鄰域表示為B(ε),q為鄰域B(ε)中的一點,其像素值為I(q),梯度值為?I(q)都是已知的,根據鄰域B(ε)內部的像素值近似得到p點的一階估計I(p),表示為如下式:

則點p的像素值需要用鄰域中的所有點來計算,則新的灰度值表示為如下式:
其中ω(p,q)是權值函數,它是用來限定鄰域中像素貢獻大小的。貢獻大的像素值要得到保留,小的要去除。權值函數可以用如下式子表示:

其中dir(p,q)為方向因子,保證了該像素點的主要貢獻在于接近法線的方向上;dst(p,q)為幾何距離,將距離像素點p的幾何距離較遠的點賦予較小的值;lev(p,q)為水平集距離,保證了離經p的待修復區域的輪廓線越近的已知像素點對點p的貢獻越大。分別用如下式子表示:
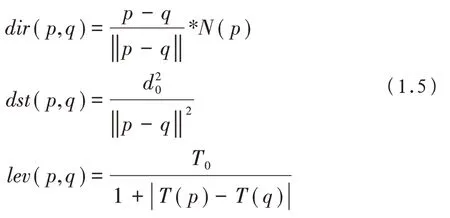
其中N(p)的數值為:當p點位于鄰域內置為1,否則為0;d0和T0為常數,通常設置為1;T(p)和T(q)是根據FMM 算法得出來的,分別表示p點和q點到待修復邊界的距離。
通過上述算法得到初步修復圖像,再進行維納濾波,它是一種自適應最小均方差濾波器,對于有噪聲的圖像和運動模糊的圖像可以很好地解決。圖3 為最終的修復圖像。
2.3 結果分析
對比修復前后圖像可知,圖像修復后細小的部件,例如圖中的開口銷部件很好的還原,“橫道子”已經被算法處理掉。本文采用3 種方法來評價圖像質量:峰值信噪比(PSNR)、均值方差(MSE)和結構相似性(SSIM)[2]。經計算可得:修復前圖像的PSNR 值為16db,均值方差(MSE)為2.6,結構相似性(SSIM)為0.2;修復后圖像PSNR 值為39db,均值方差(MSE)為0.1,結構相似性(SSIM)為0.85。結果顯示經本算法修復后的圖像質量比較好,說明此修復算法不會導致圖像信息丟失,對部件自動識別沒有影響。圖4 為開口銷部件修復前后的細節比較。
3 實驗與結論
選取廣州鐵路局的某個過車較多且經常下雨的路段進行試驗,獲取100 輛雨天氣候中的底部圖像,保證本算法的多樣性,分別統計修復圖像前所有報警數和修復后的報警數。
經統計,100 輛車圖像未經過修復前底部報警數為2932 個,平均每輛車報警數約為30 個;經過本算法修復后報警數為512 個,平均每輛車報警約為5 個。故本算法產生的報警數相比之前減少六倍之多,證明本算法能有效減少雨天氣候中因圖像問題而產生的大量誤報警。
4 結語
本文通過對降雨天氣時自動識別系統所產生的大量誤報警分析,其主要來源是圖像的干擾問題,這種形式的干擾不光導致識別的誤報警激增,也影響了個別細小部件的真實報警[3]。為了解決誤報警增多的問題,保證動車組的行車安全,本文提出一種基于圖像處理的修復圖像方法。
經試驗證明,本文提出的方法能在不影響TEDS系統真實報警的前提下,有效降低誤報警個數,提高準確率,減輕檢車人員的負擔,為實現故障識別系統的完全自動化提供一些依據。在圖像處理的基礎上,加入深度學習算法繼續完成對圖像的修復工作。
猜你喜歡
中國自動識別技術(2023年6期)2024-01-12 08:13:22
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
水上消防(2019年3期)2019-08-20 05:46:08
特別健康(2018年3期)2018-07-04 00:40:18
發明與創新(2016年26期)2016-08-22 03:23:28
海峽科技與產業(2016年3期)2016-05-17 04:32:12
