基于波前編碼的彈載相控陣探測器凝視高分辨成像
2020-07-21 09:43:56程呈高敏周曉東紀(jì)永祥宗竹林
兵工學(xué)報(bào) 2020年6期
程呈,高敏,周曉東,紀(jì)永祥,宗竹林
(1.陸軍工程大學(xué)石家莊校區(qū) 導(dǎo)彈工程系,河北 石家莊 050003; 2.32180部隊(duì),北京 100072;3.陸軍工程大學(xué)石家莊校區(qū) 彈藥工程系,河北 石家莊 050003; 4.中國華陰兵器試驗(yàn)中心,陜西 華陰 714200;5.電子科技大學(xué) 電子科學(xué)技術(shù)研究所,四川 成都 611731)
0 引言
新型箱式遠(yuǎn)程制導(dǎo)火箭彈搭載相控陣探測器,用于對前視目標(biāo)區(qū)域進(jìn)行高分辨探測,形成目標(biāo)區(qū)域高分辨距離像。對載彈平臺而言,要求探測器信號處理過程盡可能耗時(shí)較少并且高效,同時(shí)需要保證一定的預(yù)設(shè)精度。又由于彈載探測器對地探測過程中,載彈與目標(biāo)平面之間的相對運(yùn)動轉(zhuǎn)角很小,傳統(tǒng)意義上運(yùn)用基于層析和距離- 多普勒原理,并結(jié)合目標(biāo)與探測器之間相對運(yùn)動形成的目標(biāo)區(qū)域圖像[1],無法滿足彈載平臺的探測需求。因此,對于彈載探測器前視成像的研究,能夠歸結(jié)為彈載探測器的凝視成像問題。
目前,隨著信號處理技術(shù)與相關(guān)元器件的飛速發(fā)展,針對凝視成像問題的一系列信號處理算法與波形設(shè)計(jì)策略隨之提出,同時(shí)有相當(dāng)一部分已經(jīng)用于成像系統(tǒng)中。2009年,英國利物浦大學(xué)公開報(bào)道了基于壓縮感知的太赫茲脈沖分光成像系統(tǒng)[2],該系統(tǒng)利用時(shí)域光譜技術(shù)原理探測回波,通過優(yōu)化的隨機(jī)掩膜板進(jìn)一步降低了采樣次數(shù),提升了成像效率。2016年,Pan等[3]提出了采用可平移的掩膜板實(shí)現(xiàn)孔徑編碼,與美國萊斯大學(xué)所提出的成像方法類似。2014年,美國國防高級研究計(jì)劃局發(fā)布了成像雷達(dá)先進(jìn)掃描技術(shù)的研究局項(xiàng)目[4],意在研究一種不依賴合成孔徑雷達(dá)(SAR)成像和逆合成孔徑雷達(dá)(ISAR)成像過程中目標(biāo)與探測器系統(tǒng)之間相對運(yùn)動的先進(jìn)雷達(dá)成像技術(shù),且成像系統(tǒng)擁有比相控陣?yán)走_(dá)系統(tǒng)更低的復(fù)雜程度。從上述研究成果來看,為解決目標(biāo)與平臺相對運(yùn)動較小的凝視成像問題,無論在光學(xué)領(lǐng)域或電子領(lǐng)域,都在探測信號前端采用編碼技術(shù)處理,以通過編碼處理有效提升探測信號的模式與自由度。因此,由目標(biāo)反射得到的回波信號中,攜帶的目標(biāo)信息越豐富,越有利于前視高分辨成像。
本文以彈載探測器前視高分辨成像問題為研究對象,對探測波束進(jìn)行編碼,以改變探測波束方向圖以及波前空間調(diào)制。由于目標(biāo)回波是目標(biāo)區(qū)域散射系數(shù)分布與輻射方向圖的廣義卷積,探測區(qū)域內(nèi)方向圖的非相關(guān)性越強(qiáng),前視目標(biāo)區(qū)域內(nèi)強(qiáng)散射點(diǎn)的分辨效果就會越好[5]。因此,本文提出一種基于波前編碼的前視成像算法,利用隨機(jī)編碼矩陣改變每一陣元探測波束的初始相位,使得探測波束實(shí)現(xiàn)波前編碼。相對于傳統(tǒng)探測信號的平面波前,這種波前編碼探測波形能夠進(jìn)一步放大目標(biāo)回波信號的差異性,有利于彈載探測器發(fā)現(xiàn)目標(biāo)、分辨目標(biāo)。同時(shí),在后續(xù)的信號處理過程中,利用回波信號對同一距離維內(nèi)的單脈沖響應(yīng)曲線(MRC)進(jìn)行迭代優(yōu)化,使得方位向測角結(jié)果實(shí)現(xiàn)聚焦。
1 前視成像模型
根據(jù)平面波分解定理可知:一種照射模式能夠被視為若干個不同幅度、頻率、初相和入射角的均勻平面波的疊加[2]。因此,探測波束的自由度越高,由目標(biāo)區(qū)域回波信號中所攜帶的目標(biāo)強(qiáng)散射點(diǎn)信息就會越豐富,才可以在凝視條件下實(shí)現(xiàn)高分辨探測。解決凝視成像的高分辨探測研究主要集中在波前編碼、信號處理等方面,其基本思想就是增大探測波束模式的多樣性,即實(shí)現(xiàn)波前的非平面化。利用波前編碼技術(shù),單一收發(fā)通道就可以產(chǎn)生不同的電磁波照射模式,探測波束波前為非平面波前[6]。
1.1 波前編碼原理
相比于傳統(tǒng)的雷達(dá)探測系統(tǒng),波前編碼思想為照射模式提供了更多樣性的照射模式,極大地提升了雷達(dá)系統(tǒng)高分辨成像能力[7]。同時(shí),探測系統(tǒng)的收發(fā)鏈路也較為簡單,易實(shí)現(xiàn)小型化;電控陣列天線也為波前編碼提供了硬件支撐[8]。非平面波前實(shí)現(xiàn)高分辨探測模式如圖1所示。

圖1 波前編碼高分辨探測示意圖Fig.1 Schematic diagram of high-resolution detection based on wavefront coding
由圖1可見,傳統(tǒng)雷達(dá)探測系統(tǒng)向目標(biāo)區(qū)域輻射平面波前(見圖1(a)),當(dāng)強(qiáng)散射點(diǎn)1與強(qiáng)散射點(diǎn)2方位信息不同、距離信息相同時(shí),到達(dá)兩強(qiáng)散射點(diǎn)的探測信號差異較小,因此對于兩散射點(diǎn)的回波信號中具有較小的方位信息,很難對兩散射點(diǎn)進(jìn)行方位向分辨。而非平面波前使同一波前實(shí)現(xiàn)幅度或者相位信息的隨機(jī)起伏(見圖1(b)),由于探測波束的模式較大,兩強(qiáng)散射點(diǎn)處的回波信號更大概率產(chǎn)生差異,更有利于實(shí)現(xiàn)前視高分辨探測。
非平面波前在前視成像的過程中對相控陣各陣元的發(fā)射信號方向圖進(jìn)行調(diào)制,使得相控陣探測器總體方向圖的波前為非平面波前,且調(diào)制矩陣已知,在回波信號處理的過程中,綜合利用回波信號與調(diào)制矩陣增大了輻射場內(nèi)非時(shí)空相關(guān)性。傳統(tǒng)探測運(yùn)用平面波束探測示意如圖2所示。

圖2 相控陣探測回波平面波前Fig.2 Planar wavefront of echo signal detected by phased array detector
由目標(biāo)區(qū)域強(qiáng)散射點(diǎn)形成的回波信號被相控陣陣元截獲,且截獲的回波信號由發(fā)射信號與目標(biāo)區(qū)域強(qiáng)散射點(diǎn)的散射系數(shù)共同決定。當(dāng)考慮接受噪聲時(shí),相控陣陣元截獲目標(biāo)區(qū)域回波信號可以表示為
Sr=S·σ+Nr,
(1)
式中:Sr表示回波信號向量,
(2)
Sr(tN)表示在tN時(shí)刻(N為信號到達(dá)目標(biāo)區(qū)域的不同時(shí)刻)發(fā)射信號在目標(biāo)區(qū)域形成的回波信號,(t1,t2,…,tN)表示發(fā)射信號到達(dá)每一距離網(wǎng)格的時(shí)刻;S表示發(fā)射信號向量,
(3)
K為探測器天線到目標(biāo)區(qū)域之間距離的第K網(wǎng)格,(r1,r2,…,rK)表示成像網(wǎng)格中心的位置向量,作為每一距離網(wǎng)格的標(biāo)識,S(tN,rK)表示發(fā)射信號中tN時(shí)刻位于rK網(wǎng)格處的信號,
(4)
M為發(fā)射天線陣元數(shù)量,Sm表示第m個編碼陣元的發(fā)射信號,Rm表示第m個發(fā)射陣元的位置向量;σ表示目標(biāo)區(qū)域強(qiáng)散射點(diǎn)散射系數(shù)向量,
(5)
(σ1,σ2,…,σK)表示目標(biāo)區(qū)域不同位置的散射系數(shù);Nr表示接收噪聲向量,
(6)
(N(t1),N(t2),…,N(tN))表示不同時(shí)刻由目標(biāo)區(qū)域產(chǎn)生的噪聲及雜波。根據(jù)推導(dǎo),相控陣探測器前視高分辨成像即變成求解(1)式的解。理想情況下,(3)式的發(fā)射信號矩陣中各行各列相互獨(dú)立,在無噪聲情況下通過(1)式可以精確解算,獲得目標(biāo)區(qū)域散射系數(shù)向量σ. 但是在現(xiàn)實(shí)探測過程中,由于信號帶寬、調(diào)相范圍等因素的影響,發(fā)射信號矩陣中必定會存在一定的相關(guān)性,因此對于最終散射系數(shù)向量的求解必定受到影響。
1.2 求解目標(biāo)區(qū)域散射矩陣
對于傳統(tǒng)的前視波束掃描而言,由目標(biāo)區(qū)域各散射點(diǎn)(以2個散射點(diǎn)為例)反射得到的回波信號可以表示為
(7)
式中:S(t)~S(tN)表示不同時(shí)刻到達(dá)目標(biāo)區(qū)域的探測信號。
顯然,由(7)式無法得到目標(biāo)區(qū)域σ的精確解,信號處理結(jié)果會產(chǎn)生較大的角度誤差,進(jìn)而導(dǎo)致前視成像分辨率較低。而經(jīng)過波束調(diào)制后的非平面波前所獲得的回波信號可以表示為
(8)
式中:S1(t1)~S1(tN)和S2(t1)~S2(tN)分別表示不同時(shí)刻到達(dá)兩目標(biāo)的調(diào)制信號。
由于對發(fā)射波束進(jìn)行了調(diào)制,輻射到不同的散射點(diǎn)的信號之間存在差異,從而為方位向分辨帶來了可能。推廣至多散射點(diǎn)情況,(1)式中發(fā)射信號矩陣S的行、列相關(guān)性成為對前視多散射點(diǎn)方位向分辨的基礎(chǔ),為求取σ的精確解,需對信號矩陣的秩進(jìn)行討論。通常情況下,相控陣陣元比目標(biāo)區(qū)域的強(qiáng)散射點(diǎn)多:
1)當(dāng)rank(S)≥K時(shí),求解σ時(shí)的有效方程組數(shù)大于待求解未知數(shù),可以通過求解可逆矩陣等方式,對向量σ中的各元素進(jìn)行精確求解。
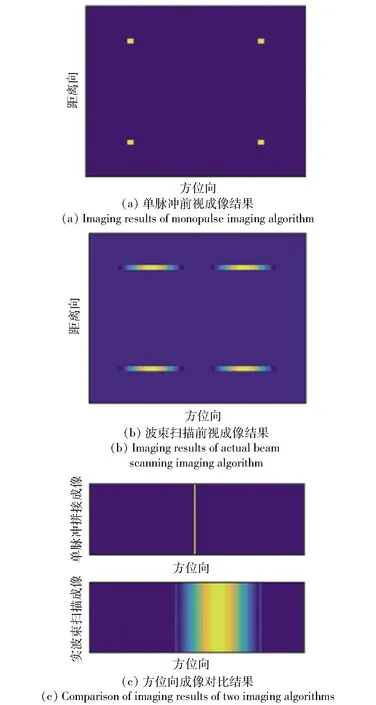
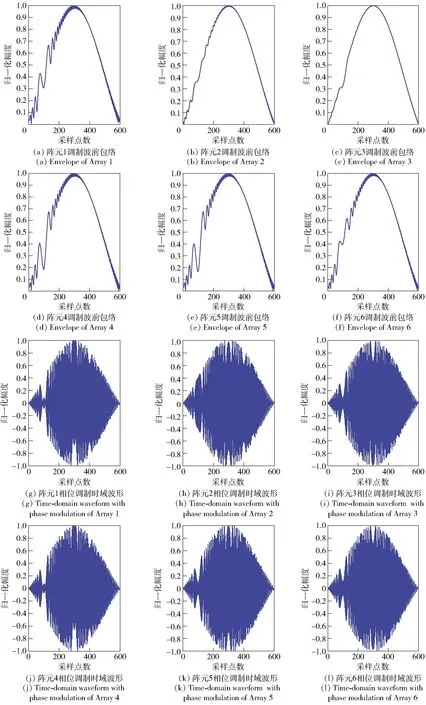
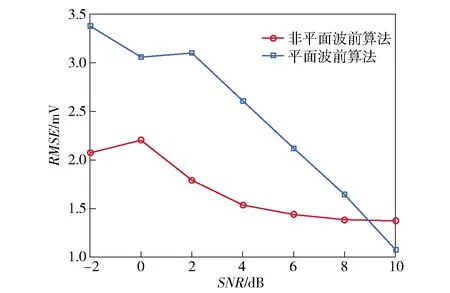
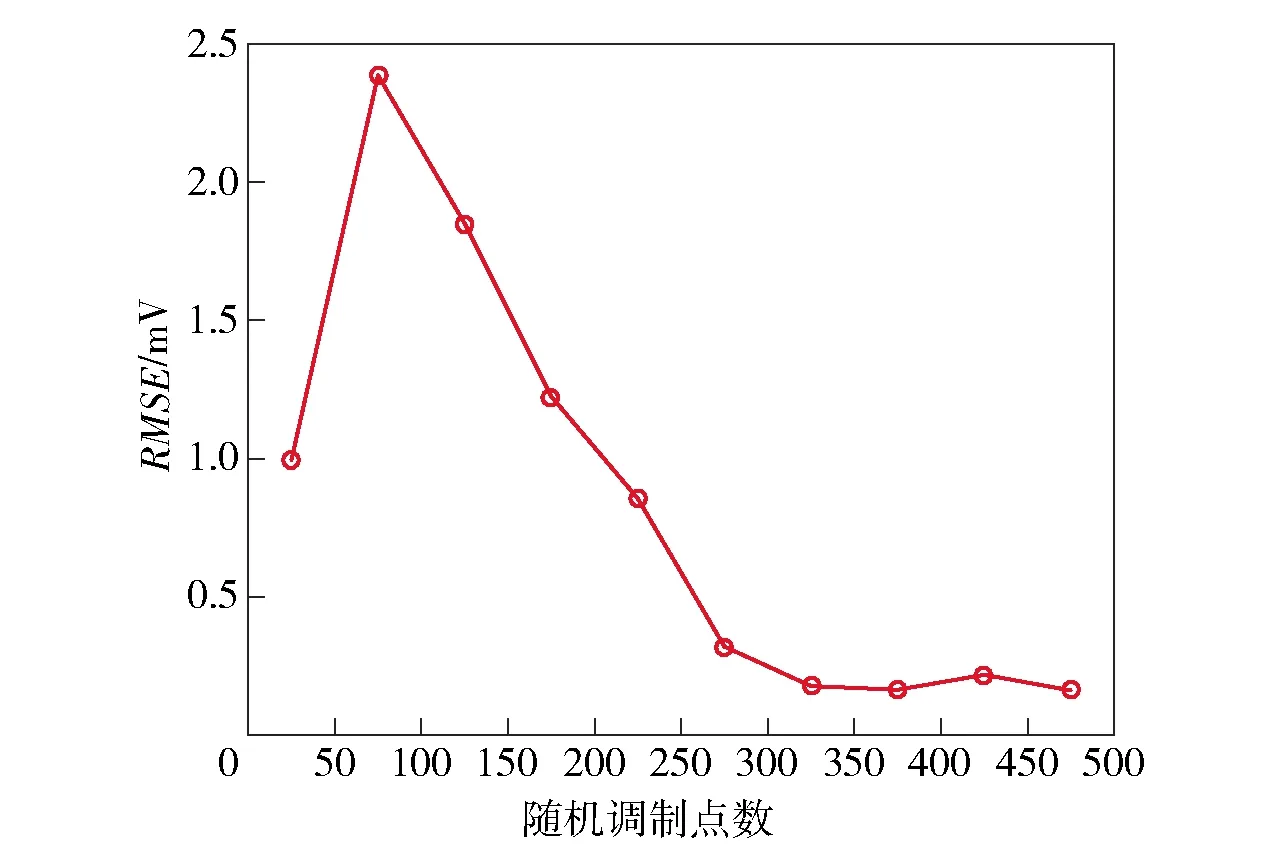
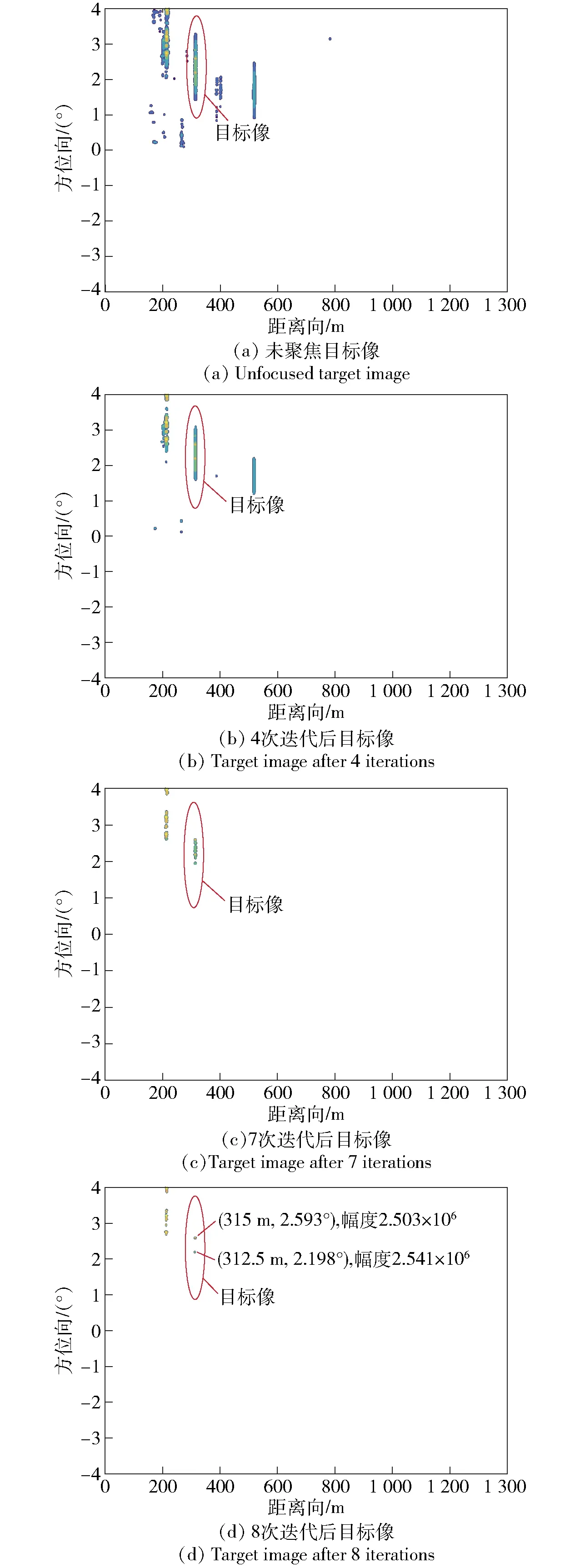
2)當(dāng)rank(S) 綜上所述,將前視目標(biāo)強(qiáng)散射點(diǎn)探測問題劃歸為判定發(fā)射信號矩陣的相關(guān)性問題,當(dāng)發(fā)射信號矩陣各行、列的非相關(guān)性最大時(shí),能夠精確求解前視目標(biāo)區(qū)域內(nèi)的強(qiáng)散射點(diǎn)散射系數(shù)向量。因此利用波前編碼技術(shù)盡可能增強(qiáng)(3)式矩陣中各元素之間的非相關(guān)性[10]。下面對前視探測分辨率與空間、時(shí)間相關(guān)性之間的關(guān)系進(jìn)行分析,將(3)式化為列原子形式,得 (9) 式中:sk表示S的第k個列向量, (10) 為便于理論推導(dǎo),將(4)式進(jìn)行簡化, (11) τmk表示第m個發(fā)射信號到達(dá)第k個目標(biāo)區(qū)域網(wǎng)格形成回波產(chǎn)生的時(shí)間延遲。令γsp表示(9)式中各元素之間的空間相關(guān)性函數(shù),可得 γsp=〈si,sj〉, (12) 式中:〈〉表示取相關(guān)函數(shù);i、j分別表示成像單元。將(12)式展開,得 (13) (14) 式中:tx、ty分別對應(yīng)行原子的快時(shí)間,x、y分別表示方位向與距離向的位置。與空間相關(guān)性類似,當(dāng)γti=0時(shí),元素之間的時(shí)間非相關(guān)性越大。 彈載相控陣探測器前視高分辨成像,利用線性調(diào)頻子脈沖頻率步進(jìn)信號實(shí)現(xiàn)寬帶信號,結(jié)合彈載相控陣探測器的發(fā)射信號波形,對其空間相關(guān)性與時(shí)間相關(guān)性進(jìn)行具體推導(dǎo)。設(shè)探測器某一陣元的初始發(fā)射信號[11]可以表示為 (15) 式中:a為發(fā)射信號幅度;fc為發(fā)射信號載頻;q為發(fā)射波束的調(diào)制頻率;t為時(shí)間變量。則經(jīng)過波束隨機(jī)調(diào)制后,由目標(biāo)區(qū)域強(qiáng)散射點(diǎn)反射被接收天線截獲得到的回波信號可以表示為 (16) 式中:τm表示第m個陣元的時(shí)間延遲;ω為回波信號的調(diào)制頻率;φ(t,m)表示波束調(diào)制隨機(jī)相位因子。從而利用隨機(jī)相位因子即可實(shí)現(xiàn)每一陣元發(fā)射信號的波前編碼,進(jìn)而實(shí)現(xiàn)非平面波前: (17) (18) 式中:φf=π[fc+k(nts-τ0)],ts為相鄰陣元發(fā)射信號的時(shí)間間隔,τ0為初始時(shí)間差,是一個常數(shù);φc=2π[fc+k(2τ0-tx-ty)2];Δτji為第一陣元到達(dá)第i個和第j個成像單元的時(shí)間延遲差;d為相鄰陣元之間的距離;φ(tx,m)為方位向波束調(diào)制隨機(jī)相位因子;φ(ty,m)為距離向波束調(diào)制隨機(jī)相位因子。 由(17)式與(18)式可知:隨機(jī)調(diào)相的范圍越大,隨機(jī)性越強(qiáng),發(fā)射信號之間的非相關(guān)性越大,越有利于實(shí)現(xiàn)高分辨成像。由推導(dǎo)可知,編碼天線的隨機(jī)相位范圍越大,各陣元產(chǎn)生的探測波束之間的非相關(guān)性越強(qiáng)[12]。在實(shí)際探測過程中,對每一陣元發(fā)射波束進(jìn)行隨機(jī)相位加權(quán),用于形成非平面波前進(jìn)行目標(biāo)區(qū)域的探測,如圖3所示。 圖3 調(diào)制相位實(shí)現(xiàn)非平面波前Fig.3 Phase-modulated planar wavefront 如圖3所示,為了實(shí)現(xiàn)前視高分辨成像,采用一定范圍內(nèi)的相位波前編碼,使陣元與陣元之間的探測信號具有已知調(diào)制模式的隨機(jī)調(diào)制相位,增加不同陣元發(fā)射波束之間的差異程度,在凝視成像條件下,最大程度地?cái)y帶更多的目標(biāo)區(qū)域有效信息,從而有利于高分辨成像[13-14]。 當(dāng)相控陣探測器天線截獲得到目標(biāo)區(qū)域的回波信號后,需要利用相關(guān)高效的正則化重構(gòu)算法,對目標(biāo)回波中的強(qiáng)散射元素進(jìn)行精確重構(gòu)。本文在稀疏度自適應(yīng)匹配追蹤(SAMP)算法的基礎(chǔ)上改進(jìn)初始稀疏度估計(jì)原則,同時(shí)對步長進(jìn)行自適應(yīng)處理,建立Modified-SAMP(MSAMP)算法。 利用單脈沖測角技術(shù)對探測區(qū)域內(nèi)同一距離維下的不同方位向單元進(jìn)行自適應(yīng)MRC,實(shí)現(xiàn)角度高分辨。單脈沖方位向測角是利用探測區(qū)域回波形成和波束Σ(θ)、差波束Δ(θ)的比值進(jìn)行角度分辨的。在傳統(tǒng)角度分辨過程中,和波束、差波束的關(guān)系[15]可以表示為 Δ(θ)=Σ(θ)tan (Rπθ)j, (19) 式中:θ為目標(biāo)偏離探測波束中心角度;R為常系數(shù)。因此,將tan (Rπθ)視為差波束與和波束比值的虛部,則θ可以表示為 (20) 式中:[]imag表示取虛部函數(shù)。由(20)式可以看出,決定角度分辨率的重要因素為和波束、差波束。傳統(tǒng)意義上的單脈沖測角將探測范圍內(nèi)的全部回波數(shù)據(jù)用于形成和波束、差波束,從而進(jìn)行角度解算,使方位向角度分辨率較低,難以實(shí)現(xiàn)高分辨測量。究其原因,是因?yàn)閠an (Rπθ)曲線的尖銳程度直接影響了角度分辨率。為此,尋找最優(yōu)的MRC就成為實(shí)現(xiàn)方位向高分辨測角的關(guān)鍵。 僅考慮方位向,設(shè)t0時(shí)刻發(fā)現(xiàn)波束覆蓋范圍內(nèi)的點(diǎn)目標(biāo),由于雷達(dá)回波數(shù)據(jù)可視為目標(biāo)表面散射系數(shù)與天線方向圖的卷積,和波束、差波束可以表示為 (21) 式中:A為目標(biāo)表面散射系數(shù);θt為點(diǎn)目標(biāo)與波束軸線夾角;Sum為和波束;Diff為差波束。則由目標(biāo)回波數(shù)據(jù)之比,得到實(shí)際MRC可表示為 (22) 在探測過程中,最強(qiáng)散射點(diǎn)所反映的回波強(qiáng)度最大,當(dāng)方位向測角分辨率達(dá)到最優(yōu)時(shí),該點(diǎn)處的回波響應(yīng)應(yīng)該無限趨于沖激響應(yīng)函數(shù)[16-17]。受此啟發(fā),利用同一距離維下最強(qiáng)散射點(diǎn)相鄰范圍內(nèi)的回波數(shù)據(jù)為參考數(shù)據(jù),并設(shè)定評估閾值,通過不斷迭代計(jì)算、修正并縮小相鄰數(shù)據(jù)范圍。從而獲得最強(qiáng)散射點(diǎn)回波信號范圍內(nèi)的MRC,并認(rèn)為該曲線是該距離維下的最優(yōu)MRC. 用該曲線數(shù)據(jù)進(jìn)行同一距離維下的方位向測角,必然能夠提升測角精度。利用迭代求解最優(yōu)MRC的具體步驟如下: 步驟1獲取回波數(shù)據(jù)。 設(shè)回波經(jīng)脈壓后的和、差通道回波信號分別為Sum(r,t)、Diff(r,t),其中r表示第r個距離維。當(dāng)進(jìn)行方位向測角時(shí),設(shè)測角結(jié)果中最大幅度對應(yīng)的時(shí)間為tmax,則該時(shí)刻對應(yīng)的是r距離維內(nèi)的最大散射目標(biāo)點(diǎn)。但是由于此時(shí)獲得的目標(biāo)角度信息應(yīng)用的是(20)式所示的MRC,測量時(shí)間與實(shí)際對應(yīng)時(shí)間存在誤差,記為Δtmax. 步驟2設(shè)定數(shù)據(jù)范圍。 取tmax相鄰時(shí)間范圍,記為Tu,其中u表示迭代次數(shù),則Tu可以表示為 Tu={t|tmax-tδu≤t≤tmax+tδu}, (23) 式中:tδu為第u次迭代時(shí)所取的時(shí)間范圍;Tu的寬度為2tδu,且tδu的取值范圍不超過天線掃過單個波束主瓣寬度的時(shí)間。則更新后的區(qū)域回波和波束、差波束可以表示為 (24) 步驟3求解MRC. 每一次迭代時(shí)的方位向MRC可表示為 (25) 式中:*表示取共軛。(25)式所示即為r距離維、第u次迭代后得到的MRC. 當(dāng)?shù)螖?shù)逐漸增加時(shí),MRC也會趨于最優(yōu),因此還需要對其進(jìn)行評估,判斷曲線是否滿足預(yù)設(shè)需求。 步驟4更新迭代條件。 最優(yōu)的MRC在距離維最強(qiáng)散射點(diǎn)處呈現(xiàn)趨近于類似沖激響應(yīng)的時(shí)域圖形,因此利用能量占比確定其是否達(dá)到最優(yōu)。設(shè)最強(qiáng)散射點(diǎn)處的能量為EP(r,Tu),其他區(qū)域能量為EPr(r,Tu),閾值為Th(r),則有 (26) 當(dāng)且僅當(dāng)H1事件(能量比大于或等于預(yù)設(shè)閾值)發(fā)生時(shí),即認(rèn)為tanr(Rπθ)是r距離維下的最優(yōu)MRC;當(dāng)H0事件(能量比小于預(yù)設(shè)閾值)發(fā)生時(shí),需要更新時(shí)間范圍tδu,并進(jìn)行第u+1次迭代。迭代的約束條件應(yīng)該以滿足預(yù)設(shè)分辨率為宜,過多追求分辨率精度會導(dǎo)致冗余計(jì)算。因此增加約束條件,一旦當(dāng)tδu/tδ1≤λ(λ為預(yù)設(shè)分辨率),即可停止迭代計(jì)算,并認(rèn)為此時(shí)MRC最優(yōu),且迭代次數(shù)最少。 步驟5修正中心位置。 (27) 在進(jìn)入下一次迭代計(jì)算時(shí),需要修正最強(qiáng)散射點(diǎn)回波的中心時(shí)間,利用tmax|re代替tmax,進(jìn)行新一輪迭代計(jì)算。 步驟6測量方位角度。 設(shè)經(jīng)過迭代計(jì)算得到r距離維下的最優(yōu)MRC為tanr(Roπθ),Ro表示常數(shù),利用tanr(Roπθ)對r距離維內(nèi)的目標(biāo)散射點(diǎn)進(jìn)行角度估計(jì),對其進(jìn)行幅度和相位檢測。獲取該距離維內(nèi)的所有目標(biāo)角度集合θr后,即可根據(jù)(r,θr)確定目標(biāo)位置。 圖4 數(shù)據(jù)存儲過程示意圖Fig.4 Schematic diagram of data storing process 前視目標(biāo)區(qū)域的高分辨成像基于高分辨測角以及測距基礎(chǔ),利用和、差通道回波數(shù)據(jù),經(jīng)過距離向的脈沖壓縮處理,得到方位向測角數(shù)據(jù)。為了提升目標(biāo)區(qū)域成像的精度,需利用單脈沖技術(shù)將每一存儲回波數(shù)據(jù)單元在方位向進(jìn)行重新精確定位。首先,將數(shù)據(jù)區(qū)域的每一回波存儲單元的方位分為L等分,數(shù)據(jù)區(qū)域劃分的過程可以視為將方位分辨單元減小為原來的1/L. 然后,針對每一存儲單元的和、差回波信號對到達(dá)角(DOA)進(jìn)行解算,根據(jù)目標(biāo)處各強(qiáng)散射點(diǎn)對應(yīng)的方位角將其重新定位于新的回波數(shù)據(jù)存儲單元,從而每一回波信號存儲單元的信號在方位向經(jīng)歷一次重新精確定位處理。數(shù)據(jù)存儲過程如圖4所示。 如圖4所示,回波數(shù)據(jù)存儲在數(shù)據(jù)單元內(nèi),當(dāng)處理至(x,y)個數(shù)據(jù)單元時(shí),結(jié)合回波信號的強(qiáng)散射點(diǎn)DOA信息,將信號數(shù)據(jù)進(jìn)一步壓縮與重新定位,因此在(x,y)內(nèi)的強(qiáng)散射點(diǎn)回波數(shù)據(jù)僅在該存儲單元的第l列(見圖4)。直觀上看,原始數(shù)據(jù)由(x,y)單元精確定位至(x,yl)單元,將每一回波數(shù)據(jù)都進(jìn)行上述處理,目標(biāo)強(qiáng)散射點(diǎn)位置就會進(jìn)一步精確定位,自然地,前視探測分辨率也會隨之提高。前視成像具體步驟如圖5所示。 圖5 前視成像具體步驟Fig.5 Specific steps of forward-looking imaging 由圖5可見,彈載探測器前視成像具體步驟包括距離像脈沖壓縮以及目標(biāo)區(qū)域強(qiáng)散射點(diǎn)方位向定位。相比于傳統(tǒng)的目標(biāo)高分辨距離像(HRRP)探測技術(shù)[18-19],彈載平臺具有更高的實(shí)時(shí)性要求,因此彈載相控陣探測器前視成像更趨近于凝視成像。這就要求探測信號具備更多的調(diào)制信息,目標(biāo)區(qū)域的強(qiáng)散射點(diǎn)形成的回波信號才能在短時(shí)間內(nèi)囊括更多的目標(biāo)信息,使彈載相控陣探測器具有前視高分辨成像潛力[19]。結(jié)合波前編碼相關(guān)理論以及該技術(shù)在光學(xué)與微波領(lǐng)域的應(yīng)用,在前視成像過程中對相控陣各陣元的發(fā)射信號方向圖進(jìn)行調(diào)制,使相控陣探測器總體方向圖的波前為非平面波前且調(diào)制矩陣已知;在回波信號處理的過程中,綜合利用回波信號與調(diào)制矩陣增大輻射場內(nèi)非時(shí)空相關(guān)性,為凝視條件下實(shí)現(xiàn)前視高分辨成像奠定了基礎(chǔ)。 非平面波前相對于平面波前而言,在回波信號到達(dá)相控陣元處的波前為曲線,這是因?yàn)橄嗫仃囸佋蛲廨椛潆姶挪〞r(shí)在前端進(jìn)行了波前編碼,導(dǎo)致各陣元的發(fā)射天線方向圖之間存在差異。根據(jù)波前差異性,獲取更多來自目標(biāo)區(qū)域強(qiáng)散射點(diǎn)的位置與角度信息,有利于獲得前視HRRP. 由于彈載相控陣探測器的諸多限制,導(dǎo)致前視成像過程不應(yīng)具有較復(fù)雜的計(jì)算[20]。本文提出的前視成像算法并沒有較復(fù)雜的信號處理運(yùn)算,因此能夠最大程度地保證整個相控陣探測器的響應(yīng)實(shí)時(shí)性。總體的前視探測算法如圖6所示。 由圖6可知,彈載相控陣探測器前視探測總體包括三部分:一是利用前視高分辨測角算法實(shí)現(xiàn)目標(biāo)區(qū)域的精確測角;二是利用前視高精度測距技術(shù)實(shí)現(xiàn)對目標(biāo)區(qū)域的精確測距;三是結(jié)合測角與測距數(shù)據(jù)形成前視探測區(qū)域的高分辨像。 方位向的高分辨測角算法迭代次數(shù)對于整體響應(yīng)耗時(shí)的影響更加直接,實(shí)現(xiàn)方位向的聚焦主要通過回波信號處理過程中的迭代算法,通過迭代不斷修正同一距離維內(nèi)的MRC. 本文在不同迭代次數(shù)條件下進(jìn)行Monte Carlo仿真分析,探究迭代次數(shù)與響應(yīng)耗時(shí)的關(guān)系,仿真結(jié)果如圖7所示。 利用3次、5次與8次迭代的方位向高分辨測角算法進(jìn)行仿真實(shí)驗(yàn)。首先在不同信噪比(SNR)條件下探究迭代次數(shù)與測角算法響應(yīng)耗時(shí)的影響。與理論推導(dǎo)相符,當(dāng)?shù)螖?shù)增加時(shí)不同SNR下的測角算法響應(yīng)耗時(shí)增加,如圖7(a)所示;當(dāng)?shù)螖?shù)達(dá)到8次時(shí),算法的平均響應(yīng)耗時(shí)最大;當(dāng)SNR較大逐漸增大時(shí),算法響應(yīng)耗時(shí)穩(wěn)定在2 ms. 如圖7(b)所示,當(dāng)?shù)螖?shù)增加時(shí),方位向誤差逐漸降低,經(jīng)過8次迭代,方位向誤差穩(wěn)定在0.6 m. 利用一系列仿真實(shí)驗(yàn)驗(yàn)證本文提出的高分辨成像算法。首先對仿真實(shí)驗(yàn)參數(shù)進(jìn)行約束,相關(guān)參數(shù)如表1所示。 如表1所示,分別利用Taylor加權(quán)與Bayliss加權(quán)實(shí)現(xiàn)和波束、差波束方向圖,并求解獲得理想的MRC,如圖8所示。 根據(jù)仿真參數(shù),規(guī)定目標(biāo)區(qū)域的散射點(diǎn)數(shù)量,并對每一散射點(diǎn)的散射系數(shù)進(jìn)行設(shè)置。設(shè)在同一距離維中存在101個散射點(diǎn),為驗(yàn)證本文成像算法的可行性,設(shè)目標(biāo)區(qū)域內(nèi)的101個散射點(diǎn)僅有一個強(qiáng)散射點(diǎn)(方位向?yàn)?°處),而其余散射點(diǎn)與強(qiáng)散射點(diǎn)的散射系數(shù)相差兩個數(shù)量級,利用實(shí)波束掃描成像方法與本文所提成像方法進(jìn)行成像,仿真結(jié)果如圖9所示。 圖6 彈載相控陣探測器前視探測總體流程Fig.6 Overall flow chart of forward-looking detection for missile-borne phased array detector 圖7 不同迭代次數(shù)的測角耗時(shí)與方位向誤差Fig.7 Time-consuming and error of azimuth angle measurement with different iterations 表1 仿真參數(shù)Tab.1 Simulation parameters 圖8 30陣元線性陣列的和、差方向圖以及MRCFig.8 Sum and difference direction patterns and MRC of 30-element linear array 圖9 實(shí)波束與單脈沖對單一目標(biāo)成像結(jié)果Fig.9 Single target imaging results of actual beam scanning and monopulse 由圖9可見,兩種成像方法針對單一目標(biāo)的前視成像結(jié)果在方位向的聚焦程度有較大的差距。利用實(shí)波束掃描對目標(biāo)成像時(shí),由于探測信號寬度、掃描速率等因素,在成像過程中會產(chǎn)生很嚴(yán)重的拖尾現(xiàn)象,導(dǎo)致方位向的較大覆蓋,同時(shí)對于目標(biāo)的方位向DOA估計(jì)也會造成一定誤差。若實(shí)波束寬度很小,則前視成像結(jié)果也可以有所提升。但是在實(shí)際應(yīng)用過程中,探測器的波束寬度無法實(shí)現(xiàn)極窄波束,因此在硬件方面進(jìn)行的相關(guān)改進(jìn)十分困難。一般地,利用實(shí)波束前視成像的過程必須伴隨著一系列補(bǔ)償算法,用以消除由于波束寬度造成的各種誤差,但同時(shí)會帶來由波束掃描產(chǎn)生的方位向成像拓展,不利于高分辨成像。 本文利用單脈沖拼接成像模式,能夠準(zhǔn)確獲得前視強(qiáng)散射點(diǎn)的DOA,同時(shí)在成像結(jié)果上更接近沖激響應(yīng)函數(shù)。將目標(biāo)區(qū)域擴(kuò)展成為101×101的二維平面,在目標(biāo)區(qū)域內(nèi)設(shè)置4個強(qiáng)散射點(diǎn),依舊利用實(shí)波束掃描以及單脈沖兩種成像方式進(jìn)行成像,結(jié)果如圖10所示。 圖10 二維目標(biāo)區(qū)域內(nèi)的實(shí)波束掃描結(jié)果與單脈沖成像結(jié)果Fig.10 Imaging results of actual beam scanning and monopulse imaging algorithms in 2-D target area 由圖10可見,對于二維多目標(biāo)的成像結(jié)論與單一目標(biāo)成像類似,實(shí)波束掃描成像的方位向分辨率較低,對于高分辨成像可以通過單脈沖成像技術(shù)實(shí)現(xiàn)。結(jié)合本文所提基于波前編碼與自適應(yīng)MRC的彈載相控陣探測器凝視高分辨成像算法,先對波前編碼方式以及編碼范圍對前視成像結(jié)果的影響進(jìn)行研究,再根據(jù)獲得的自適應(yīng)MRC進(jìn)一步優(yōu)化方位向成像結(jié)果。非平面波前探測信號對成像質(zhì)量的影響,主要表現(xiàn)在信號的隨機(jī)調(diào)相范圍、線性調(diào)頻系數(shù)、時(shí)間采樣間隔、時(shí)間采樣次數(shù)和載頻。本文所關(guān)注的重點(diǎn)為隨機(jī)調(diào)相范圍,因此在探測信號設(shè)計(jì)過程中,應(yīng)保證剩余的影響因素保持一致。 設(shè)一維線陣包括6個陣元,利用隨機(jī)調(diào)相的非平面波前探測波束的包絡(luò)與時(shí)域波形如圖11所示。 由圖11可見,經(jīng)過波前隨機(jī)調(diào)制后得到波前包絡(luò),利用6陣元標(biāo)準(zhǔn)線性陣列天線探測器對建立的目標(biāo)成像區(qū)域進(jìn)行探測,可以獲得目標(biāo)區(qū)域強(qiáng)散射點(diǎn)的位置信息以及方位信息。將本文所提基于波前編碼的前視成像算法與傳統(tǒng)非調(diào)制(平面波前)前視成像算法成像結(jié)果進(jìn)行對比,通過誤差分析表明了兩種典型成像算法的優(yōu)勢與劣勢;同時(shí)對兩種不同算法的成像效率進(jìn)行對比,利用相同成像環(huán)境求解獲得兩種算法的整體效率,利用整體耗時(shí)來衡量成像效率,可以表明不同算法的整體效率。 在不同信噪比條件下對比兩種成像算法的仿真誤差,設(shè)置SNR參數(shù)從-2~10 dB,遞增步長為2 dB,每一信噪比條件下進(jìn)行100次Monte Carlo仿真計(jì)算,得到仿真結(jié)果如圖12所示。 由圖12可見:在SNR較低階段,平面波前算法誤差處于高值,隨著SNR的逐漸增加,該算法的均方根誤差(RMSE)逐漸降低;非平面波前算法的RMSE一直處于較低的狀態(tài)。與前文推導(dǎo)相符,由于平面波前在不同強(qiáng)散射點(diǎn)處的波形差異較小,得到的成像誤差會隨著SNR的改變影響較大;相比而言,非平面波前能夠很好地克服由于SNR變化較大引起的誤差較大波動。 在上述目標(biāo)環(huán)境條件設(shè)置不變的條件下,改變隨機(jī)調(diào)制點(diǎn)數(shù)且保持相鄰兩調(diào)制點(diǎn)之間的距離不變,令隨機(jī)調(diào)制點(diǎn)數(shù)在25~475范圍內(nèi)遞增,增量步長為50,每一調(diào)制點(diǎn)數(shù)條件下進(jìn)行100次Monte Carlo仿真實(shí)驗(yàn),可得隨機(jī)調(diào)制步長與成像誤差之間的關(guān)系曲線如圖13所示。 由圖13可見,隨著隨機(jī)波前調(diào)制范圍的增加,本文所提成像算法的成像誤差逐漸降低,最終能夠達(dá)到基本穩(wěn)定的低值。與前文理論推導(dǎo)相符,探測信號的隨機(jī)性越強(qiáng),對于回波信號中目標(biāo)強(qiáng)散射點(diǎn)的方位與距離信息求解越準(zhǔn)確。因此在實(shí)際應(yīng)用過程中,應(yīng)根據(jù)要求適當(dāng)增加隨機(jī)調(diào)制范圍,以保證較高的成像精度。 在仿真實(shí)驗(yàn)基礎(chǔ)上,依托相控陣探測器樣機(jī)進(jìn)行實(shí)測試驗(yàn),以驗(yàn)證算法在實(shí)際工作環(huán)境下的成像能力。 選擇可通視的普通地貌環(huán)境,環(huán)境狀態(tài)不復(fù)雜且在探測器波束覆蓋范圍內(nèi)沒有高大地物以及較強(qiáng)的金屬反射體。測試當(dāng)天小雨、無風(fēng),因此試驗(yàn)過程不計(jì)其他干擾因素。將探測器樣機(jī)置于高處,使探測波束與待測區(qū)域產(chǎn)生一定的俯仰角,利用激光測距機(jī)可準(zhǔn)確測量該角度。具體測試環(huán)境如圖14所示。 由圖14可見,在地面設(shè)置探測陣面與支架,同時(shí)在前視某一距離維內(nèi)放置角反射器,作為此次數(shù)據(jù)采集的目標(biāo)點(diǎn)(強(qiáng)散射點(diǎn))。共采集到3類、共8組數(shù)據(jù),包括單一角反射器目標(biāo)區(qū)域回波(掃描速度不同分別測量2組)、2個角反射器目標(biāo)區(qū)域回波、無角反射器目標(biāo)區(qū)域回波,回波數(shù)據(jù)通過網(wǎng)線傳輸至終端軟件并存儲,試驗(yàn)方案如表2所示。 圖11 波前編碼后的信號包絡(luò)與時(shí)域波形Fig.11 Envelope and time-domain waveform of signal after wavefront coding 圖12 不同SNR條件下兩種算法的RMSE對比Fig.12 Comparison of RMSEs of two algorithms at different SNRs 圖13 隨機(jī)調(diào)制點(diǎn)數(shù)與RMSE之間的關(guān)系Fig.13 Relationship between random modulation points and RMSE 圖14 實(shí)際測量環(huán)境Fig.14 Actual testing environment 在3種不同目標(biāo)設(shè)置方案條件下采集目標(biāo)區(qū)域回波,每種條件進(jìn)行多次掃描采集。 以表2中方案1為例對目標(biāo)區(qū)域進(jìn)行高分辨成像,取-6°~6°的探測范圍回波數(shù)據(jù)進(jìn)行成像,成像結(jié)果如圖15所示。 表2 回波數(shù)據(jù)采集方案Tab.2 Echo data acquisition scheme 圖15 實(shí)測目標(biāo)區(qū)域的強(qiáng)散射點(diǎn)方位- 距離成像結(jié)果(方案1)Fig.15 Azimuth-range imaging results of strong scattering points in measured target area (Scheme 1) 對目標(biāo)區(qū)域回波信號進(jìn)行高分辨處理,圖15(a)為傳統(tǒng)成像結(jié)果,圖15(b)為方位向高分辨處理后的成像結(jié)果。對比二者可以直觀地看出,經(jīng)過方位向自聚焦處理后,目標(biāo)像覆蓋范圍更小,更有利于對強(qiáng)散射目標(biāo)的準(zhǔn)確定位。近距離處成像是由于探測波束旁瓣能量泄露,距離探測器較近的地物反射電磁波導(dǎo)致的成像。這是因?yàn)榫嚯x探測器天線較近,探測信號經(jīng)地物反射后形成的回波能量較強(qiáng),被天線截獲,造成在最終的方位- 距離像內(nèi)出現(xiàn)強(qiáng)回波信號。 對比圖15(a)與圖15(b)可知,由于進(jìn)行了自聚焦處理,目標(biāo)像在方位向的分辨率得到有效提升,方位向角度覆蓋能夠達(dá)到傳統(tǒng)掃描成像時(shí)的1/3,距離向探測結(jié)果為313.94 m,測距誤差為1.06 m滿足預(yù)設(shè)探測精度,在一定程度上表明了基于自聚焦成像算法的可行性與優(yōu)越性。根據(jù)表2方案,增設(shè)2個角反射器的目標(biāo)區(qū)域設(shè)置,進(jìn)一步探究基于自聚焦的高分辨成像算法應(yīng)用的邊界條件,即方位向分辨最小距離。按照試驗(yàn)方案2對目標(biāo)區(qū)域進(jìn)行實(shí)際探測,經(jīng)過相同的信號處理過程,遍歷-4°~4°的探測器掃描范圍,得到最終成像結(jié)果如圖16所示。 按照目標(biāo)設(shè)置規(guī)則,在目標(biāo)區(qū)域放置兩個角反射器,利用探測器對目標(biāo)區(qū)域進(jìn)行覆蓋掃描,獲得目標(biāo)像(見圖16),與1個角反射器目標(biāo)區(qū)域探測結(jié)果類似,經(jīng)過回波自聚焦處理后,目標(biāo)像在方位向上可分辨。由圖16(d)可知,經(jīng)過多次迭代后,2個角反射器距離像聚焦后能夠在方位向有效分辨,且目標(biāo)距離維315 m處兩目標(biāo)方位向之間的間隔2.75 m. 進(jìn)一步驗(yàn)證算法的適用范圍,將試驗(yàn)方案3的回波信號數(shù)據(jù)用于成像算法的優(yōu)越性。對目標(biāo)區(qū)域進(jìn)行實(shí)際探測后,經(jīng)過相同的信號處理過程,遍歷-4°~4°的探測器掃描范圍,在不同迭代次數(shù)條件下對目標(biāo)區(qū)域強(qiáng)散射點(diǎn)的成像結(jié)果進(jìn)行分析。結(jié)果表明,經(jīng)過的迭代次數(shù)越多,目標(biāo)區(qū)域內(nèi)的強(qiáng)散射點(diǎn)方位向覆蓋逐漸減小,從而能夠達(dá)到區(qū)分強(qiáng)散射目標(biāo)的目的。得到最終成像結(jié)果如圖17所示。 由圖17可見:與理論推導(dǎo)相符,經(jīng)過多次迭代后,強(qiáng)散射點(diǎn)與目標(biāo)區(qū)域內(nèi)較強(qiáng)散射點(diǎn)的回波信號在方位向覆蓋區(qū)域逐漸減小,對比圖17(a)與圖17(d)可以明顯看出;目標(biāo)像最終可以達(dá)到方位向可區(qū)分;距離向探測結(jié)果誤差約為2.50 m,方位向誤差約為2.35 m,能夠滿足彈載相控陣探測器的二維探測精度。 圖16 2個角反射器在目標(biāo)區(qū)域的強(qiáng)散射點(diǎn)方位- 距離成像結(jié)果(方案2)Fig.16 Azimuth-range imaging of strong scattering points in target area in which 2 angular reflectors are placed (Scheme 2) 圖17 2個角反射器在目標(biāo)區(qū)域的方位- 距離成像結(jié)果(方案3)Fig.17 Azimuth-range imaging of strong scattering points in target area in which 2 angular reflectors are placed (Scheme 3) 通過3種方案的目標(biāo)區(qū)域設(shè)置,可以反映出成像算法針對多目標(biāo)的方位向可區(qū)分能力,增加2個角反射器的目標(biāo)區(qū)域進(jìn)行成像的結(jié)果,驗(yàn)證基于自聚焦的彈載相控陣探測器高分辨成像算法對于目標(biāo)方位向分辨能力,表明了高分辨成像算法的可行性與優(yōu)越性。 為解決彈載探測器的前視高分辨凝視成像問題,本文提出一種基于波前編碼的成像算法,有效提升了凝視條件下探測波束之間的非相關(guān)性,使得能夠在更短時(shí)間內(nèi)獲得更豐富目標(biāo)區(qū)域強(qiáng)散射點(diǎn)的有效信息,從而具備高分辨成像的潛力。在截獲目標(biāo)回波信號后的信號處理部分,利用基于最優(yōu)MRC的角分辨算法提升目標(biāo)區(qū)域強(qiáng)散射點(diǎn)的方位向分辨率。通過理論推導(dǎo)發(fā)現(xiàn),調(diào)制范圍與SNR是影響成像精度的主要因素,從后續(xù)的仿真實(shí)驗(yàn)結(jié)果中也得到了與理論推導(dǎo)一致的結(jié)論。綜上所述,在實(shí)際探測過程中,適當(dāng)擴(kuò)大隨機(jī)調(diào)制范圍以及隨機(jī)性,可以使算法適應(yīng)更多的目標(biāo)散射點(diǎn)成像,同時(shí)也可以抑制因SNR帶來的成像誤差。 下一步將主要從不同雜波對算法的影響方面入手,研究地雜波、樹雜波、草雜波等對算法穩(wěn)定性的影響;進(jìn)而根據(jù)這些影響因素對隨機(jī)調(diào)制范圍的邊界條件進(jìn)一步約束,進(jìn)一步提升算法效率、規(guī)范算法在應(yīng)用過程中的參數(shù)設(shè)置。


2 自適應(yīng)MRC實(shí)現(xiàn)角度高分辨

3 彈載探測器凝視高分辨成像

4 仿真實(shí)驗(yàn)和試驗(yàn)驗(yàn)證
4.1 仿真實(shí)驗(yàn)驗(yàn)證




4.2 外場實(shí)測試驗(yàn)驗(yàn)證




5 結(jié)論
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
電測與儀表(2015年5期)2015-04-09 11:30:52