基于有限和瞬時旋量理論的Exechon并聯(lián)機(jī)器人運(yùn)動學(xué)分析
2020-07-21 10:50:32連賓賓
工程設(shè)計學(xué)報 2020年3期
關(guān)鍵詞:模型
劉 卓,連賓賓,2,李 祺
(1.天津大學(xué)機(jī)械工程學(xué)院機(jī)構(gòu)理論與裝備設(shè)計教育部重點(diǎn)實(shí)驗(yàn)室,天津300354;2.天津大學(xué)仁愛學(xué)院機(jī)械工程系,天津301636;3.天津航天機(jī)電設(shè)備研究所,天津300301)
并聯(lián)機(jī)器人具有剛度與體積比大、精度高、結(jié)構(gòu)穩(wěn)定及便于模塊化設(shè)計等優(yōu)點(diǎn),廣泛應(yīng)用于航空航天裝備、衛(wèi)星跟蹤系統(tǒng)的加工制造等現(xiàn)代尖端技術(shù)領(lǐng)域[1-4]。其中,具有一平動兩轉(zhuǎn)動(1T2R)運(yùn)動形式的Exechon并聯(lián)機(jī)器人可通過串接二自由度轉(zhuǎn)頭組成五自由度混聯(lián)機(jī)器人,受到工業(yè)界和學(xué)術(shù)界的廣泛關(guān)注[5]。
目前,Sun等[11]提出一種用于機(jī)器人設(shè)計的有限和瞬時旋量理論(FIS理論):有限旋量可描述并聯(lián)機(jī)器人的有限運(yùn)動,即其位移;瞬時旋量用于表示并聯(lián)機(jī)器人的速度。有限旋量和瞬時旋量之間的微分映射可以有效地反映位移和速度的關(guān)系,基于此,可在統(tǒng)一數(shù)學(xué)框架下建立并聯(lián)機(jī)器人的拓?fù)淠P秃退俣饶P停瑸镋xechon并聯(lián)機(jī)器人的運(yùn)動學(xué)分析提供新方法。
在機(jī)器人運(yùn)動學(xué)分析中,首先在串聯(lián)機(jī)器人運(yùn)動學(xué)分析中引入雅克比矩陣的條件數(shù),隨后直接擴(kuò)展到并聯(lián)機(jī)器人,提出了局部條件數(shù)[12]、全局條件數(shù)[13]等一系列指標(biāo)。然而,當(dāng)采用這些指標(biāo)來評價Ex-echon并聯(lián)機(jī)器人的運(yùn)動學(xué)性能時,結(jié)果存在嚴(yán)重的不一致性,無法用于指導(dǎo)機(jī)器人的分析和設(shè)計。
針對上述問題,筆者基于FIS理論,對Exechon并聯(lián)機(jī)器人進(jìn)行運(yùn)動學(xué)分析,獲得該機(jī)器人的拓?fù)淠P秃退俣饶P停⒁詿o量綱的虛功率傳遞率作為性能指標(biāo)來評價Exechon并聯(lián)機(jī)器人的運(yùn)動學(xué)性能,最后利用MATLAB軟件分析Exechon并聯(lián)機(jī)器人的局部虛功率傳遞率分布情況。
1 有限和瞬時旋量理論
根據(jù)Chasles有限位移定理,剛體的有限運(yùn)動Sf可以表示為繞某一軸的轉(zhuǎn)動與平移[14-17]:

式中:sf和rf分別表示運(yùn)動軸線方向的單位向量和位置向量;θ和t分別表示剛體繞軸線的轉(zhuǎn)動角度與平移距離。
當(dāng)剛體實(shí)現(xiàn)2個連續(xù)的有限運(yùn)動時,其運(yùn)動可表示為:

式中:符號“△”表示旋量三角合成運(yùn)算;Sf,q和Sf,h表示前后2個連續(xù)的有限運(yùn)動。
基于Mozzi定理,剛體的任意瞬時運(yùn)動可表示為繞軸線的轉(zhuǎn)動角速度ω與平移速度v。則有限運(yùn)動和瞬時運(yùn)動之間的微分映射如下[18]:
式中:st和rt分別表示瞬時旋量軸線方向的單位向量和位置向量。
基于有限旋量和瞬時旋量及其微分映射關(guān)系,可以直接、簡便地建立并聯(lián)機(jī)構(gòu)的拓?fù)淠P秃退俣饶P停瑸榻C(jī)器人運(yùn)動學(xué)分析所用的雅克比矩陣提供了一種新的一體化方法。
2 Exechon并聯(lián)機(jī)器人位置逆解
Exechon并聯(lián)機(jī)器人由動平臺、靜平臺、2條對稱放置的UR支鏈和1條SR支鏈組成,其中3條支鏈均通過R副與動平臺連接,UR支鏈和SR支鏈分別通過U副、S副與靜平臺連接,其虛擬樣機(jī)模型和結(jié)構(gòu)示意圖如圖1所示。圖1(b)中:Ai點(diǎn)和Bi點(diǎn)(i=1,2,3)分別表示連接靜平臺的U副、S副中心和連接動平臺的R副中心;△A1A2A3和△B1B2B3均為等腰直角三角形,其外接圓半徑分別為a和b。以連線A1A3的中點(diǎn)為原點(diǎn),建立靜坐標(biāo)系O-xyz,連線OA3為x軸,z軸垂直于平面A1A2A3向下,y軸滿足右手定則;同理,以連線B1B3的中點(diǎn)為原點(diǎn),建立動坐標(biāo)系O′-x′y′z′,2個坐標(biāo)系原點(diǎn)O和O′的距離為l。
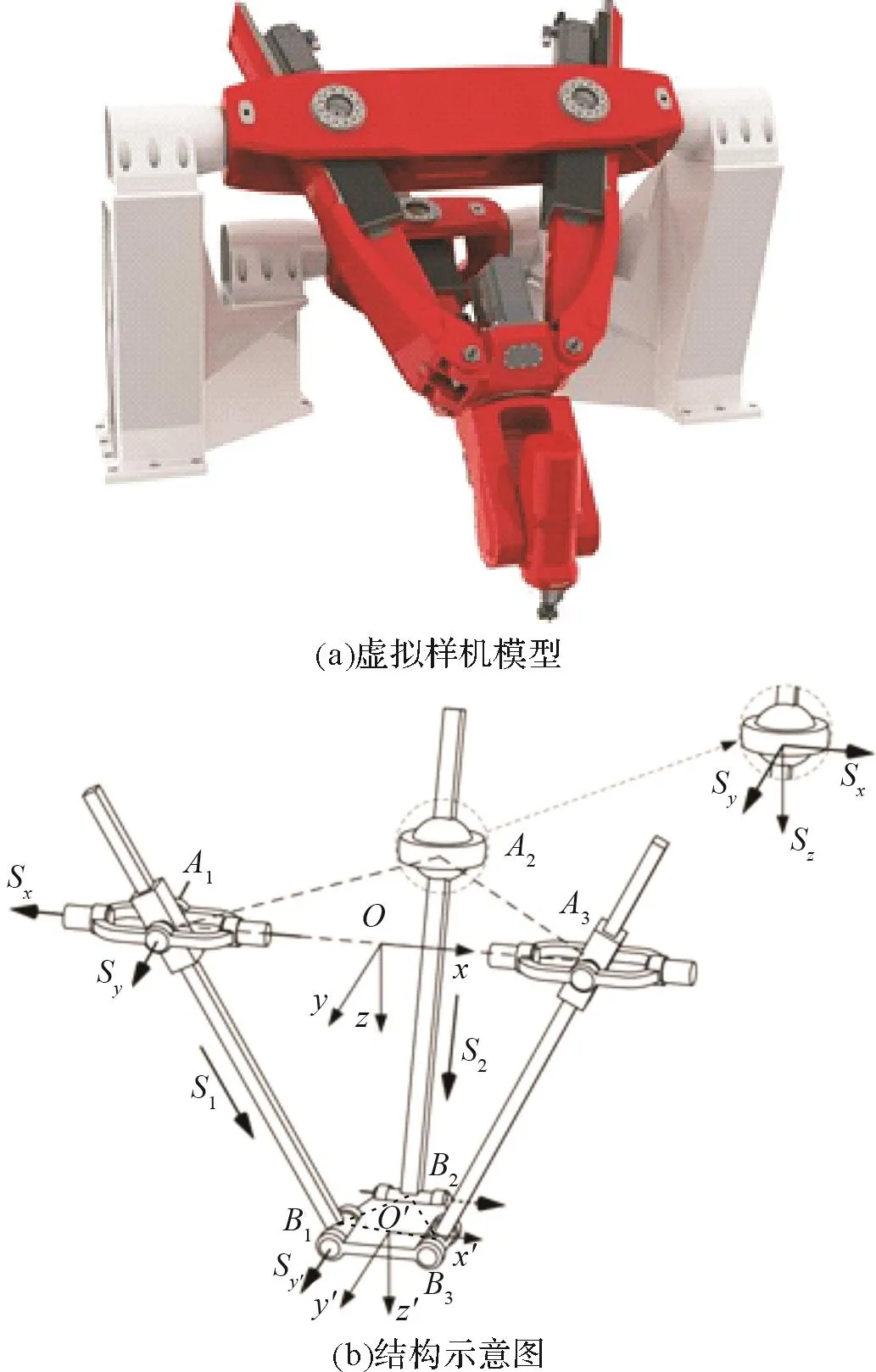
圖1 Exechon并聯(lián)機(jī)器人虛擬樣機(jī)模型和結(jié)構(gòu)示意圖Fig.1 Virtual prototype model and structure diagram of Ex-echon parallel robot
位置逆解求解是指在已知機(jī)構(gòu)動平臺位姿的情況下求得3條支鏈的桿長qi。當(dāng)機(jī)構(gòu)主動支鏈的長度發(fā)生變化后,動坐標(biāo)系O′-x′y′z′相對于靜坐標(biāo)系O-xyz的旋轉(zhuǎn)矩陣(繞x軸轉(zhuǎn)動α,繞y軸轉(zhuǎn)動β,繞z軸轉(zhuǎn)動γ)可表示為:
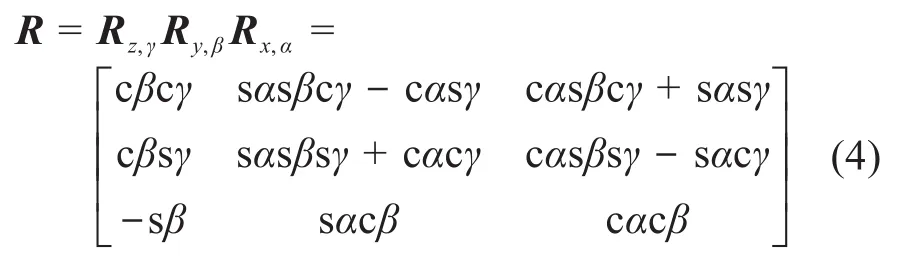
式中:s和c分別表示sin和cos。
O′點(diǎn)在靜坐標(biāo)系O-xyz中的位置向量為:

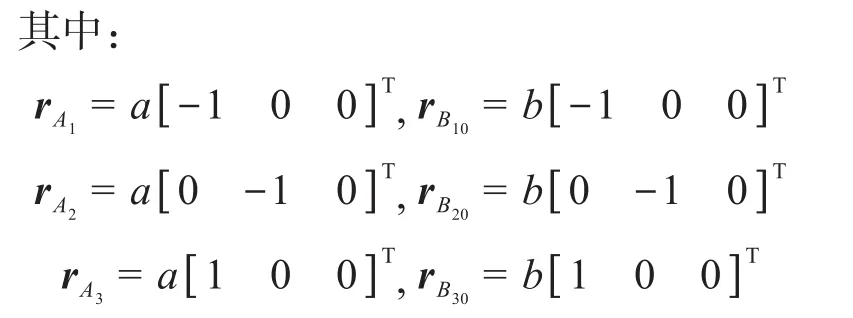
根據(jù)圖1(b),建立Exechon并聯(lián)機(jī)器人的閉環(huán)矢量方程:

式中:si為第i條支鏈移動副的單位向量;rAi和rBi分別表示Ai點(diǎn)和Bi點(diǎn)的位置向量,且。
在式(6)兩端點(diǎn)乘ci(ci為動平臺上第i個R副軸線方向的單位矢量,ci=Rci0),可得:

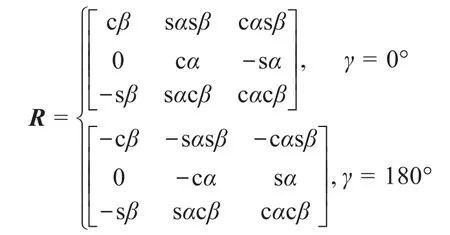
由式(7)可得sγ=0,即γ=0°或者γ=180°,則旋轉(zhuǎn)矩陣R可簡化為:
綜上,Exechon并聯(lián)機(jī)器人的位置逆解可表示為:

3 基于旋量理論的速度模型
基于Exechon并聯(lián)機(jī)器人的位置逆解,利用FIS理論構(gòu)建該機(jī)器人的速度模型。其中,連接靜平臺的S副可分解為3個方向不同的R副,U副可視作由2個R副組成。因此,根據(jù)式(2),UPR支鏈和SPR支鏈的有限運(yùn)動為:

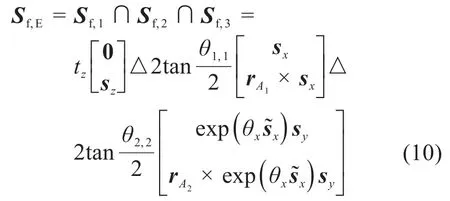
式中:Sf,i表示第i條支鏈的有限運(yùn)動;sx、sy和sz分別表示x、y和z軸方向的單位向量;θi,j和ti,j分別表示第i條支鏈第j個運(yùn)動副的轉(zhuǎn)動角度與平移距離。
Exechon并聯(lián)機(jī)器人動平臺的運(yùn)動為支鏈運(yùn)動的子集,滿足多條支鏈求交運(yùn)算,由式(9)可得Ex-echon并聯(lián)機(jī)器人的拓?fù)淠P停?/p>
根據(jù)式(3),對Exechon并聯(lián)機(jī)器人的拓?fù)淠P瓦M(jìn)行微分處理,可直接推導(dǎo)出該機(jī)器人的速度模型:

式中:Jl,E表示Exechon并聯(lián)機(jī)器人速度雅克比矩陣;vz表示動平臺沿sz方向的線速度;ωx和ωy分別表示動平臺繞sx和sy方向的角速度;St,i,k表示第i條支鏈第k個關(guān)節(jié)的瞬時運(yùn)動;t,i,k表示第i條支鏈第k個關(guān)節(jié)運(yùn)動軸線方向的單位向量;,k表示第i條支鏈第k個關(guān)節(jié)的速度幅值,Ji表示第i個關(guān)節(jié)的所有單位旋量構(gòu)成的矩陣。
根據(jù)速度旋量和力旋量之間的互易積關(guān)系,動平臺約束力fc,i的雅克比矩陣可表示為:

式中:fa,i為第i條支鏈?zhǔn)艿降尿?qū)動力。
將Exechon并聯(lián)機(jī)器人的驅(qū)動力旋量和速度旋量相乘,可得到其動平臺與3個驅(qū)動關(guān)節(jié)之間的速度關(guān)系為:
4 Exechon并聯(lián)機(jī)器人虛功率傳遞率分析
速度/力雅克比矩陣是反映機(jī)構(gòu)輸入輸出速度/力的映射矩陣,對于同時具有平動與轉(zhuǎn)動自由度的Exechon并聯(lián)機(jī)器人而言,其速度雅克比矩陣包含線速度與角速度的映射關(guān)系,力雅克比矩陣包含力與力矩的映射關(guān)系。在以往的評價方法中,通常選取雅克比矩陣的數(shù)學(xué)特征如矩陣行列式、條件數(shù)、最大或最小奇異值以及靈巧度[19-20]等作為評價指標(biāo)。采用這類指標(biāo)評價Exechon并聯(lián)機(jī)器人的運(yùn)動學(xué)性能時,存在因線速度與角速度、力與力矩的量綱不一致而導(dǎo)致指標(biāo)物理意義不明確的問題。針對此問題,定義虛功率傳遞率并將它作為性能評價指標(biāo),即通過求解力旋量與運(yùn)動旋量的互易積,得到驅(qū)動力在對應(yīng)的運(yùn)動方向上所做的瞬時功或功率。
對于Exechon并聯(lián)機(jī)器人,其第i條開環(huán)支鏈中運(yùn)動副的自由度f<6,Jw在規(guī)則的工作空間中滿秩,則其速度模型可表示為:
式中:p是rp的斜矩陣;[TOJw]-T中的每一列表示Ex-echon并聯(lián)機(jī)器人產(chǎn)生的許動或約束運(yùn)動螺旋,則的每一行表示作用于動平臺的對應(yīng)驅(qū)動力或約束力螺旋;表示速度旋量沿軸線方向的單位向量;表示該速度旋量的大小。
對式(15)兩邊取wa,i的廣義內(nèi)積,可得:

式中:Sw,EQSt,E為Exechon并聯(lián)機(jī)器人力螺旋與對應(yīng)運(yùn)動螺旋的瞬時功率,表征運(yùn)動及力的傳遞效率。
由式(16)可知,不論St,E是移動旋量還是轉(zhuǎn)動旋量,Sw,E是力旋量還是力偶旋量,Sw,EQSt,E的單位均為W,說明以瞬時功率評價Exechon并聯(lián)機(jī)器人的運(yùn)動學(xué)性能時量綱一致,它可表征支鏈運(yùn)動及力的傳遞效率,物理意義明確。
基于上文建立的速度模型,Exechon并聯(lián)機(jī)器人的虛功率傳遞率μi可表示為:
當(dāng)μi趨近于0時,Exechon并聯(lián)機(jī)器人的驅(qū)動力無法通過支鏈傳遞到動平臺,則機(jī)器人將失去部分運(yùn)動能力。為保證Exechon并聯(lián)機(jī)器人具有良好的運(yùn)動性能和驅(qū)動力傳遞性能,虛功率傳遞率應(yīng)越大越好。因此,本文以各支鏈的最小虛功率傳遞率作為Exechon并聯(lián)機(jī)器人的運(yùn)動學(xué)性能評價指標(biāo),即:

式中:νE表示Exechon并聯(lián)機(jī)器人的局部虛功率傳遞率。
由式(17)和式(18)可知,Exechon并聯(lián)機(jī)器人的運(yùn)動學(xué)性能隨機(jī)器人位姿的變化而變化。結(jié)合Ex-echon并聯(lián)機(jī)器人加工的工程需求,給出其尺寸參數(shù)和工作空間,如表1所示,其中:Dmax表示連桿之間允許的最大距離,θSmax和θUmax分別表示S副和U副的最大轉(zhuǎn)角,lmin和lmax分別表示P副的最小移動值和最大移動值。
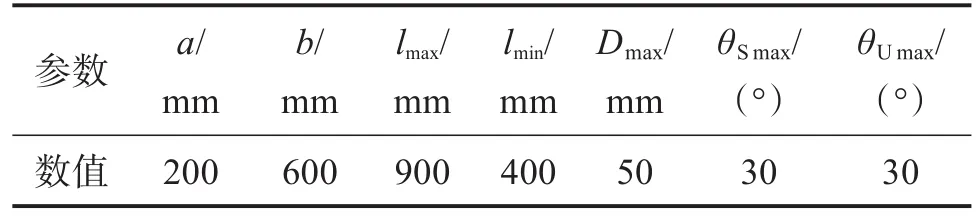
表1 Exechon并聯(lián)機(jī)器人的尺寸參數(shù)和工作空間Table 1 Dimensional parameters and geometric condi-tions of Exechon parallel robot
在可達(dá)工作空間內(nèi),選擇l=600,650,850 mm的3種位姿,利用MATLAB軟件仿真可得到Exechon并聯(lián)機(jī)器人的局部虛功率傳遞率的分布情況,如圖2所示。
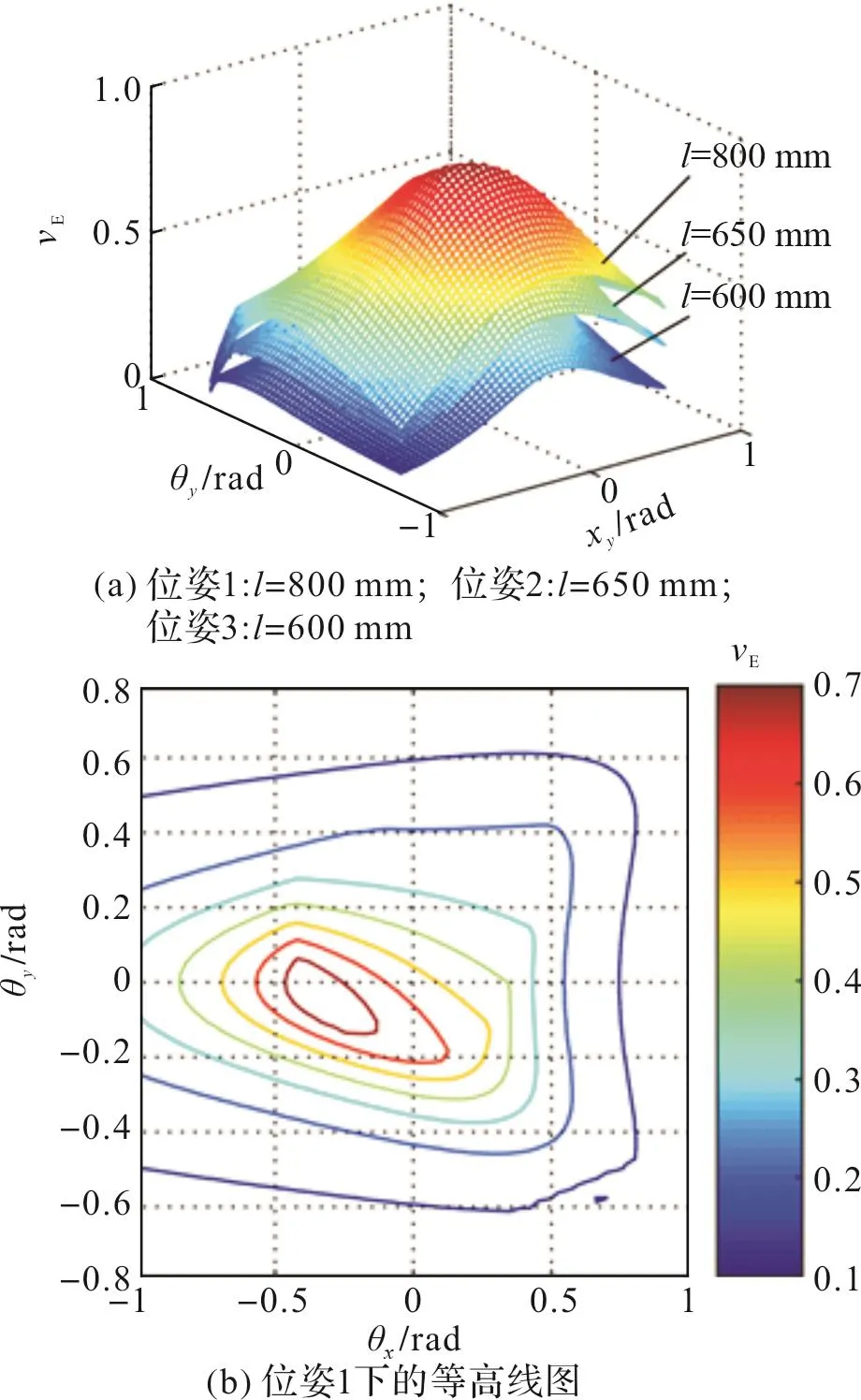
圖2 Exechon并聯(lián)機(jī)器人局部虛功率傳遞率的分布情況Fig.2 Distribution of local virtual power transmissibility of Exechon parallel robot
由圖2可知:νE隨l的增大而增大,且νE值均大于0,說明Exechon并聯(lián)機(jī)器人各支鏈的速度和力均可有效傳遞至動平臺,即該機(jī)器人在可達(dá)工作空間內(nèi)具有較好的運(yùn)動學(xué)性能,且不存在奇異位型;當(dāng)θx=θy=0rad時,νE值較大,表明Exechon并聯(lián)機(jī)器人的運(yùn)動學(xué)性能較好;隨著θx和θy的增大,νE值逐漸減小,即Exechon并聯(lián)機(jī)器人的運(yùn)動學(xué)性能隨之變差。
綜上可知,在一定的工作空間內(nèi),νE值可有效反映Exechon并聯(lián)機(jī)器人運(yùn)動學(xué)性能隨位姿的變化情況,說明該指標(biāo)可作為優(yōu)化目標(biāo)來指導(dǎo)Exechon并聯(lián)機(jī)器人的優(yōu)化設(shè)計。因此,結(jié)合工程經(jīng)驗(yàn)和實(shí)際加工條件,可制造具有良好運(yùn)動學(xué)性能的Exechon并聯(lián)機(jī)器人物理樣機(jī)。
5 結(jié)論
本文基于FIS理論對Exechon并聯(lián)機(jī)器人進(jìn)行了運(yùn)動學(xué)分析,得到的結(jié)論如下:
1)在統(tǒng)一數(shù)學(xué)框架下實(shí)現(xiàn)了Exechon并聯(lián)機(jī)器人拓?fù)淠P团c速度模型的構(gòu)建,并根據(jù)FIS理論的微分關(guān)系簡潔、直觀地建立了Exechon并聯(lián)機(jī)器人的速度/力雅克比矩陣。
2)針對Exechon并聯(lián)機(jī)器人具有平動與轉(zhuǎn)動自由度這一特點(diǎn),定義了虛功率傳遞率并用它來表征機(jī)器人運(yùn)動和力的傳遞效率,有效解決了平轉(zhuǎn)耦合機(jī)構(gòu)運(yùn)動學(xué)評價指標(biāo)量綱不統(tǒng)一的問題,為機(jī)器人機(jī)構(gòu)后續(xù)的優(yōu)化設(shè)計奠定了理論基礎(chǔ)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19