基于RGB顏色空間的機場跑道膠痕自動識別系統(tǒng)
2020-07-23 08:54:49劉曉琳李卓
現(xiàn)代電子技術 2020年14期
劉曉琳 李卓
摘? 要: 針對機場跑道膠痕識別過程中出現(xiàn)的殘留狀態(tài)不易檢測的問題,設計了一套具有機器視覺功能的膠痕自動識別系統(tǒng)的硬件平臺和軟件平臺。根據(jù)機場跑道識別區(qū)的區(qū)域特征和顏色特征,提出基于RGB顏色空間的圖像識別算法,不僅為膠痕的殘留狀態(tài)提供了識別方法,而且克服了機場跑道環(huán)境的條件限制。實物測試結果表明:該系統(tǒng)對于機場跑道的重度膠痕區(qū)域、輕度膠痕區(qū)域、無膠痕區(qū)域和異物具有較好的識別能力,完全能夠達到膠痕識別性能指標的要求,具有較高的工程實踐價值。
關鍵詞: 機場跑道; 膠痕識別; RGB顏色空間; 機器視覺; 特征提取; 圖像識別
中圖分類號: TN830.1?34; TP391.4? ? ? ? ? ? ? 文獻標識碼: A? ? ? ? ? ? ? ? ? ? ? 文章編號: 1004?373X(2020)14?0004?04
Airport runway rubber?mark automatic identification system based on RGB color space
LIU Xiaolin, LI Zhuo
(College of Electric Information and Automation, Civil Aviation University of China, Tianjin 300300, China)
Abstract: In allusion to the problem that the residual state arising in the identification process of rubber?mark on the airport runway is hard to detect, the hardware platform and software platform of the rubber?mark automatic identification system with the machine vision function are designed. An image recognition algorithm based on RGB color space is proposed according to the regional features and color features in an identification area on the airport runway. It not only provides an identification method for the residual state, but also overcomes the conditional restrictions of the airport runway environment. The physical testing results show that the system has excellent recognition ability for the heavy rubber?mark area, light rubber?mark area, area without any rubber?mark and foreign matters on the airport runway, fully meets the requirements of the rubber?mark recognition performance index, and has higher engineering practical value.
Keywords: airport runway; rubber mark; RGB color space; machine vision; feature extraction; image identification
0? 引? 言
隨著民航運輸業(yè)的快速發(fā)展,機場跑道上飛機起降變得日益密集,使得跑道著陸區(qū)路面上附著的黑色膠痕逐漸增厚。這些黑色膠痕會降低飛機輪胎與跑道之間的摩擦系數(shù),從而嚴重影響飛機起降安全[1]。為此,國內(nèi)外部分大型機場使用高壓清洗機、地面銑刨機、移動式拋丸機等[2]特種設備進行機場跑道除膠。這類設備需要工作人員先用肉眼找到跑道上的膠痕,再利用高壓水沖洗、機械刷打磨、化學藥劑清洗等方法對膠痕進行清除[3]。由于上述除膠方法受到人力因素限制,不僅影響了機場跑道除膠的工作效率,而且與當前特種設備無人化、智能化等高新技術[4?5]的發(fā)展方向不符,因此有必要利用當前的先進技術,尋找一種自動化程度高、工作效率高的膠痕識別方法。
本文根據(jù)機場跑道識別區(qū)圖像的顏色特征,采用基于RGB顏色空間的膠痕識別算法,利用單片機和攝像頭等硬件設備設計了一套具有機器視覺功能的膠痕自動識別系統(tǒng),并通過實驗研究驗證自動識別算法的可行性和有效性。
1? 機場跑道膠痕自動識別系統(tǒng)方案設計
1.1? 系統(tǒng)硬件設計
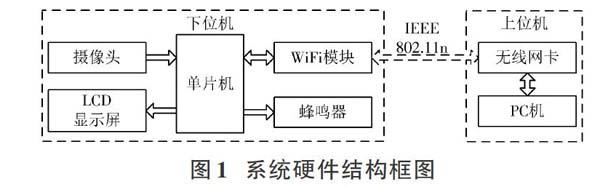
機場跑道膠痕自動識別系統(tǒng)的硬件結構分為上位機和下位機兩部分,如圖1所示。上位機是一臺自帶無線網(wǎng)卡的PC機。下位機由單片機、OV7670攝像頭、WiFi模塊、蜂鳴器、LCD顯示屏等組成。在主函數(shù)的運行管理下,自動識別系統(tǒng)完成對系統(tǒng)硬件電路的控制,通過下位機與上位機的通信,完成跑道膠痕圖像信息的獲取,圖像數(shù)據(jù)的處理、傳輸及識別等工作。
其中,單片機是自動識別系統(tǒng)的控制核心;圖像采集模塊用于采集跑道膠痕圖像;LCD顯示屏用于實時顯示圖像識別結果;蜂鳴器用于語音提示當前所采集膠痕的識別結果。自動識別系統(tǒng)中上位機與下位機通過WiFi模塊和無線網(wǎng)卡之間的IEEE 802.11n協(xié)議進行通信。
1.2? 系統(tǒng)軟件設計
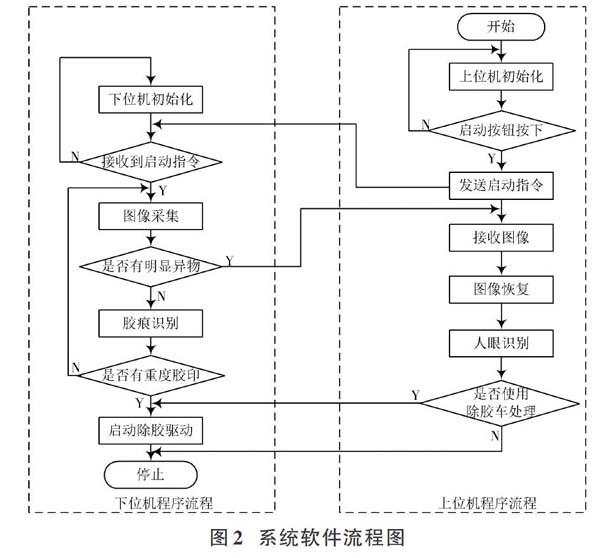
機場跑道膠痕自動識別系統(tǒng)的軟件流程如圖2所示,其工作過程描述如下。
首先,自動識別系統(tǒng)上位機和下位機進行初始化設置。然后,上位機通過無線通信向下位機發(fā)送啟動指令,之后下位機調(diào)用圖像采集子函數(shù)和異物判別子函數(shù)運行。下位機根據(jù)攝像頭采集到的圖像,判斷圖像中是否存在顏色鮮明的異物。若被檢測區(qū)域存在除膠痕以外的顏色鮮明的異物時,則將圖像發(fā)送回上位機,進行圖像恢復,并由工作人員選擇是否使用除膠車進行處理;若被檢測區(qū)域不存在除膠痕以外的異物時,則下位機進行膠痕識別。最后,下位機根據(jù)膠痕識別結果進行判斷,若被檢測區(qū)域存在重度膠痕,則啟動除膠程序;若被檢測區(qū)域存在輕度膠痕,則不需要進行除膠。
2? 機場跑道膠痕自動識別算法研究
2.1? 機場跑道識別區(qū)的區(qū)域特征分析
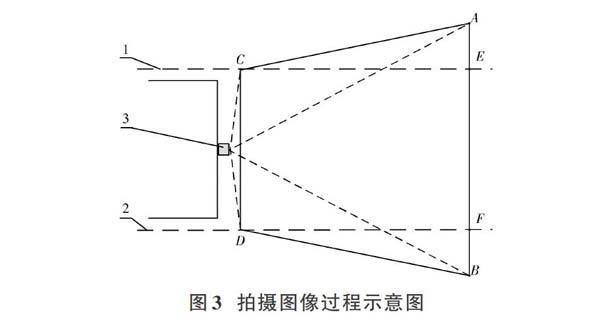
機場跑道自動識別系統(tǒng)利用攝像頭采集機場跑道膠痕圖像,其工作過程示意圖如圖3所示。
攝像頭根據(jù)小孔成像原理進行圖像檢測,所檢測到的范圍與攝像頭的角度、焦距等參數(shù)相關。在圖3中顯示了系統(tǒng)中攝像頭所檢測到的范圍,圖中虛線1和虛線2之間是機場跑道的有效識別區(qū)域即機場跑道的區(qū)域。圖中裝置3是攝像頭,四邊形ABCD區(qū)域是攝像頭所檢測到的視覺范圍。由于攝像頭檢測到的范圍是梯形區(qū)域,因此除了機場跑道的范圍之外,還會有一部分冗余信息,為了減少計算量和存儲量,并且提高計算效率,在計算機處理過程中將圖3中ACE和BDF區(qū)域所代表的冗余部分信息剪切掉。
2.2? 機場跑道識別區(qū)的顏色特征分析
目前,各大機場跑道普遍使用混凝土材質(zhì),跑道表面除了與飛機輪胎相摩擦留下的膠痕以外,還有人工標記的白色標志線[6],該標志通常用來注明跑道名稱、中心線和入口位置等。
本文采用RGB顏色空間,也稱為RGB立方體模型,則可以將機場跑道上所存在的顏色表示出來[7?8],RGB顏色空間如圖4所示。
根據(jù)圖4所示顏色空間可以發(fā)現(xiàn),RGB立方體模型中原點O(0,0,0)的顏色是純黑色,頂點N(255,255,255)的顏色是純白色,從原點O到頂點N的連線即為標準灰度線[9],它的顏色從黑色到白色漸變。灰度空間可以近似定義為以這條標準灰度線為軸線,選取某一距離p為半徑作一圓柱體中的顏色空間。由于標準灰度線是由黑色到白色漸變,所以灰度空間原點O附近可以看作黑色區(qū)域,頂點N附近可以看作白色區(qū)域,中間部分則可以看作灰色區(qū)域。
機場跑道上的標志線是純白色,原則上對應灰度空間中頂點N的位置。然而,在實際拍攝過程中需要考慮光線、拍攝角度、環(huán)境等各種因素,使得攝像頭采集到的標志線的RGB值并不是純白色(255,255,255)。所以,在確定標志線位置時需要選取一定范圍的RGB值,將色彩范圍擴展到純白色和灰白色之間的白色區(qū)域,從而增強算法的泛化能力。
同理可得,機場跑道的膠痕是純黑色,對應灰度空間中的黑色區(qū)域,而無膠痕區(qū)域?qū)叶瓤臻g中的灰色區(qū)域,異物則在灰色空間之外。
2.3? 基于RGB顏色空間的圖像識別算法設計
本文根據(jù)機場跑道路面上鮮明的顏色特征,采用抗噪性能好、識別速度快、識別精度高的RGB顏色空間識別方法[10?11]進行黑色膠痕的識別。
RGB立方體模型中的任意一點M到體對角線ON的距離r為:
[r=133R2+G2+B2+R+G+B2] (1)
根據(jù)RGB顏色空間模型中的顏色分布,可知機場跑道上物體的顏色以灰黑白三色為主,顏色較為單薄。當RGB立方體空間中任意一點M在圓柱體內(nèi)部,即灰度空間內(nèi)時,可以近似將其視為機場跑道上的正常物體;反之,視為異物。
當像素點的RGB顏色空間在以p為半徑的圓柱內(nèi)時,該像素點代表跑道上的正常顏色,即可能表示黑色膠痕、白色標志線或者灰白色混凝土。因此,為了避免將黑色膠痕和其他物體相混淆,引入一個閾值K,取K為R,G,B的算術平均值,即:
[K=meanR,G,B] (2)
在實際識別系統(tǒng)中,攝像頭采集的機場跑道膠痕圖像是RGB565格式,該格式下圖像數(shù)據(jù)與RGB顏色空間中的數(shù)據(jù)之間存在如下轉(zhuǎn)換關系,即:
[RGB=800040008·R′G′B′] (3)
式中,[R′,G′,B′]為攝像頭采集的實際數(shù)據(jù),且[R′,G′,B′]的取值范圍分別為0~36,0~63,0~36。實際采集的數(shù)據(jù)必須經(jīng)過矩陣轉(zhuǎn)換才能映射到RGB立方體模型中,因此本文所使用的實際采集數(shù)據(jù)在RGB立方體模型中是不連續(xù)的。
考慮到機場跑道白色標志線和灰色地面的顏色變化范圍比較單一,則可以根據(jù)像素點在RGB顏色空間中距離OM對角線的距離來劃分閾值[12]。
由式(1)~式(3)易得,機場跑道膠痕自動識別算法可以表示為:
[r>p?跑道異物r≤p?0≤K 式中p,p1和p2均是閾值。閾值p將RGB顏色空間中的圓柱體灰度空間以外的區(qū)域劃分為異物;閾值p1和p2將RGB顏色空間中的灰度空間劃分為重度膠痕區(qū)域、輕度膠痕區(qū)域和無膠痕區(qū)域三部分。 3? 實驗驗證與結果分析 為了驗證基于RGB顏色空間的圖像識別算法的可行性和有效性,本文設計了一套機場跑道膠痕自動識別系統(tǒng)進行實物測試。為了方便對比實驗結果,設置機場跑道的重度膠痕區(qū)域為RGB顏色空間中的白點(255,255,255)、輕度膠痕區(qū)域為灰點(125,125,125)、無膠痕區(qū)域為黑點(0,0,0),以及異物為紅點(255,0,0)。 3.1? 不同參數(shù)設置下的實驗結果 在0~255之間分別設置閾值p,p1,p2,進行三組機場跑道膠痕識別實驗,結果如圖5所示。 由圖5分析可知,設置p1和p2取值為定值,當p的取值越大,機場跑道上的異物越不容易被識別。設置p1和p取值固定,當p2的取值越小,黑色膠痕越容易被識別為輕度膠痕;設置p2和p取值固定,當p1的取值越大,黑色膠痕越容易被識別為重度膠痕。因此,為了提高識別精度,設置系統(tǒng)參數(shù)分別為p=36,p1=120,p2=135。 3.2? 不同圖像識別算法的實驗結果 在初始圖像中加入紅顏色符號“*”之后,分別采用傳統(tǒng)的圖像識別算法和基于RGB顏色空間的自動識別算法對形成的新圖像進行對比實驗,實驗結果如圖6所示。 由圖6分析可知,傳統(tǒng)識別算法將除膠設備無法觸及的區(qū)域也進行了圖像識別,不僅出現(xiàn)了冗余信息,而且將紅色符號“*”誤判為膠痕;基于RGB顏色空間的自動識別算法對待識別區(qū)域進行了有效裁剪,從而減少了計算時間和存儲時間,并且將紅色符號“*”準確地判斷為異物。實驗結果表明,基于RGB顏色空間的圖像識別算法提高了系統(tǒng)的識別精度及響應速度,改善了機場跑道膠痕的識別效果。 4? 結? 語 本文根據(jù)機場跑道膠痕識別的工作需要,設計了以單片機為控制核心的膠痕自動識別系統(tǒng),具有結構簡單、容易實現(xiàn)的優(yōu)點。在此基礎上,提出了基于RGB顏色空間的圖像識別算法,不僅為膠痕的殘留狀態(tài)提供了識別方法,而且克服了機場跑道環(huán)境的條件限制。實物測試結果表明,本文所設計的系統(tǒng)能夠?qū)τ跈C場跑道的重度膠痕區(qū)域、輕度膠痕區(qū)域、無膠痕區(qū)域和異物實現(xiàn)快速、準確的識別。并且所設計的實驗裝置可以用來檢測機場跑道路面狀況,達到降低工作強度、提高除膠效率的目的,從而保證飛機起降的安全性。 參考文獻 [1] 董城,周輪,陳麗萍,等.基于不同行駛狀態(tài)下輪胎?路面接觸應力響應研究[J].公路工程,2018,43(6):146?150. [2] 王寶帥,蘭竹,李正杰,等.毫米波雷達機場跑道異物分層檢測算法[J].電子與信息學報,2018,40(11):2676?2683. [3] 高宏偉,王慧科,李卓.一種改進的機場跑道異物檢測算法研究[J].計算機科學,2015,42(z1):205?208. [4] WU Xiaobiao, LUO Muyang, SUN Hemin, et al. Demonstration of airport runway FOD detection system based on vehicle SAR [J]. IOP conference series: materials science and engineering, 2018, 452: 1?9. [5] 胡勝,黃妙華,陳毅.基于二次閾值分割和車道寬度匹配的車道線檢測算法[J].汽車技術,2019(4):1?6. [6] 袁斌.基于圖像處理技術的火災識別方法的應用與研究[J].現(xiàn)代電子技術,2018,41(13):43?46. [7] 劉國奇,鄧銘,李晨靜.融合RGB顏色空間的植物圖像分割模型[J].鄭州大學學報(理學版),2019,51(1):18?23. [8] GAI Shan, ZHONG Yong, YANG Cihui, et al. Color monogenic wavelet transform for multichannel image denoising [J]. Multidimensional systems and signal processing, 2017, 28(4): 1463?1480. [9] 顧明,鄭林濤,尤政.基于顏色空間轉(zhuǎn)換的交通圖像增強算法[J].儀器儀表學報,2015,36(8):1901?1907. [10] 鄭晶晶,賈宇飛,周明亮.圖像采集系統(tǒng)的研究與設計[J].現(xiàn)代電子技術,2015,38(4):94?97. [11] 耿蒲龍,宋建成,劉旭飛,等.基于RGB顏色空間的礦井運動目標檢測及跟蹤方法[J].太原理工大學學報,2017,48(6):963?968. [12] ZHANG Qian, LAFFONT Pierre?Yves, SIM Terence. Lighting transfer across multiple views through local color transforms [J]. Computational visual media, 2017, 3(4): 13?22.
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年11期)2017-04-04 02:52:58
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
