刮板輸送機鏈輪鏈環嚙合特性數值模擬分析
2020-07-31 12:20:12馮文軍
中國化工貿易·中旬刊 2020年4期
馮文軍
摘 要:為了解決刮板輸送機鏈輪及鏈條磨損嚴重造成的損壞,本文對鏈輪與鏈條的嚙合特性及受力情況進行分析,并利用數值模擬軟件對額定功率下圓環鏈、鏈環及鏈輪間的動力學特性進行模擬分析,給出了鏈輪及圓環鏈的應力及位移變化情況,為后續鏈輪及圓環鏈的優化作出一定的參考,為刮板輸送機的正常運行提供一定保障。
關鍵詞:數值模擬;刮板輸送機;圓環鏈;力學特性
1 前言
隨著礦山機械水平的不斷提升,刮板輸送機作為礦山主要的運輸設備,其工作性能直接關系著礦井的正常生產。刮板輸送機的鏈條與鏈輪間的嚙合特性是刮板輸送機傳動的核心問題。為了解決刮板輸送機鏈條及鏈輪受力不均造成的磨損,眾多學者對此進行過研究。本文利用數值模擬軟件對額定功率下鏈輪鏈條間的嚙合進行分析,給出了管輸送機鏈輪及鏈條的應力應變云圖,為刮板輸送機的安全運行作出一定的參考。
2 圓環鏈與鏈輪嚙合分析
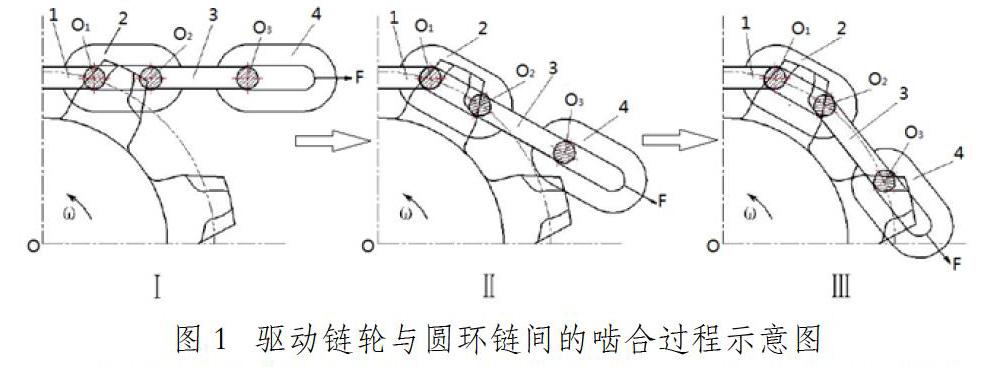
刮板輸送機在傳動過程中鏈輪及鏈齒的嚙合是一個多體動力學問題,考慮到刮板輸送機鏈輪鏈齒的形狀不規則性,所以鏈輪鏈齒間的受力問題較為復雜,所以為了分析鏈輪鏈齒嚙合間的受力情況,需要對其進行分步分析,首先需要對鏈輪與園鏈環及鏈環與圓鏈輪間的受力進行分析,后對嚙合的各個過程進行分析。驅動鏈輪與圓環鏈間的嚙合過程示意圖如圖1所示。
如驅動鏈輪與圓環鏈間的嚙合過程示意圖所示,其中點O為圓環鏈輪的中心,鏈條繞著O點進行轉動,且轉動的角速度為ω,將傳動過程進行分步,當傳動過程I時,此時平環1剛好處于鏈輪鏈窩的區域,此時平環與鏈窩進行嚙合,當圓環鏈條發生轉動時,此時的立環2及平環3等鏈環發生相對于O1點的轉動,轉動的方向為順時針方向,當傳動過程達到II時,此時立環4及平環3繞著O2發生相對的轉動,轉動的方向為順時針方向,當傳動過程達到III的位置時,此時的平環3與圓環鏈鏈窩的區域嚙合,完成了鏈輪及鏈環的嚙合過程,在刮板輸送機傳動的過程中,一直持續重復著上述運動。為了對驅動鏈輪與圓環鏈接觸的受力進行分析,以及為后續的數值模擬提供依據,對圓環鏈及圓環鏈輪間的受力進行分析,在進行嚙合過程中發現,鏈窩的長度需要大于圓環鏈的長度,這樣才能順利的嚙合。在鏈輪輪窩與鏈環嚙合過程中,由于相對的滑動極易造成鏈輪的失效,對鏈輪及鏈環間的接觸進行分析,如圖2所示。
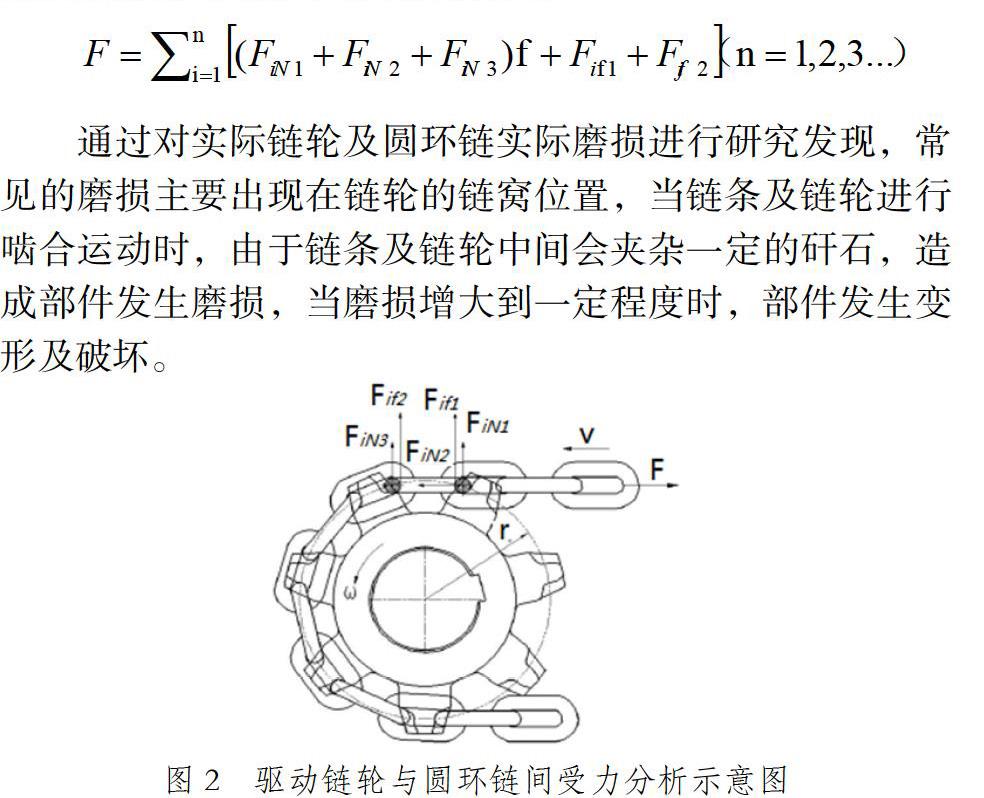
如圖2所示,其中FiN1和FiN3為有載側鏈窩底面對平環的應力;FiN2為有載側鏈窩側面對平環的應力;Fif1和Fif2為有載側平環和第一及第二個立環間的摩擦力;F為有載側的拉應力;r為鏈輪節的半徑。將平環和鏈窩間的摩擦系數設定為f,所以可以得到公式:
通過對實際鏈輪及圓環鏈實際磨損進行研究發現,常見的磨損主要出現在鏈輪的鏈窩位置,當鏈條及鏈輪進行嚙合運動時,由于鏈條及鏈輪中間會夾雜一定的矸石,造成部件發生磨損,當磨損增大到一定程度時,部件發生變形及破壞。
3 數值模擬計算分析
本文對圓環鏈和鏈輪間的接觸進行數值模擬,首先選擇abaqus數值模擬軟件,利用Catia軟件進行模型的建立,后導入abaqus中。對模型進行力學參數的設定,鏈輪的彈性模量206GPa、屈服極限230 MPa、密度7000 kg/m3;圓環鏈的彈性模量210GPa、屈服極限1170 MPa、密度7800 kg/m3。
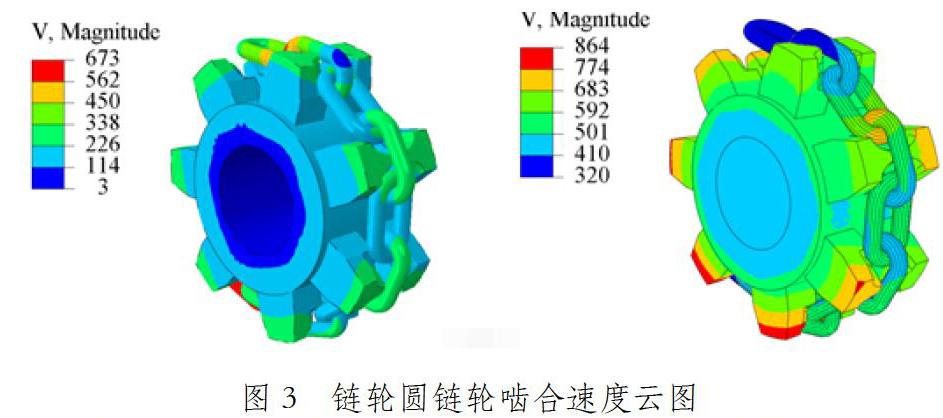
其中圓環鏈的材料選擇為23MnCrNiMo,鏈輪的材料選擇為30CrMnTi。完成模型參數設定后對模型進行網格劃分,在進行網格劃分時需要考慮計算精度及計算機的運行性能,網格劃分過細會大大加大計算機的運行時間,網格劃分過于粗疏會降低計算結果的精確實性,所以在進行網格劃分時需要在精度的基礎上降低網格的密度。對模型進行邊界設置,鏈條的拉應力設定為7.3kN,運行速度為0.78m/s,分析步設定為200,完成設定后對模型進行計算。試驗觀察可知,鏈輪的應力集中位置主要集中在鏈輪的鏈窩位置,即鏈輪與鏈環的接觸位置,同時由于鏈環在運動過程中受到波動載荷及鏈輪的多邊效應,所以使得鏈環受到的應力主要在鏈環的彎臂和直臂過渡的位置,在鏈輪的鏈窩位置出現應力集中,且應力集中最大值為524MPa,鏈窩位置的應力最大值是由于在鏈輪啟動瞬間帶動平環發生運動,瞬間產生較大的沖擊載荷,當啟動完成后,鏈輪在額定功率下逐步趨于平穩,此時鏈輪的鏈窩在接近立環的位置出現應力216MPa,鏈輪平穩運行。觀察應力集中位置,發現應力集中部位的面積較小,所以極易發生破損,當鏈輪持出現啟動停止的操作時,鏈輪發生磨損變形,且失效。對圓環鏈鏈輪嚙合的速度云圖進行分析如圖3所示。
從圖3可以看出,速度在鏈輪的輪齒部位出現應力集中,最大速度為嚙入鏈環的位置,最大的速度為0.86m/s,鏈輪圓鏈輪嚙合速度的最小值出現在嚙出端的鏈環部位,速度最小值為0.03m/s。鏈輪的速度與其位移分布規律幾乎類似,這是由于在鏈輪啟動瞬間時,鏈環的位移與其應變規律呈現正比例規律,在鏈輪帶動鏈環時,在鏈環嚙入位置出現最大的速度。對圓環鏈嚙合的應力進行分析,其主受力環為圓環鏈的左平環位置,在圓環鏈受到驅動時,鏈環彎臂位置出現圓環鏈的最大應力,且接觸面積較小,此時的左平環最大受力為782MPa,驅動瞬間產生主動運動的平環受到的集中應力更加明顯,但應力的最大值主要出現在被動運動的鏈環位置,且由于為被動運動,所以鏈環會受到一定的振動,從而導致在主動驅動與被動運動的接觸位置出現應力集中,反復如上的作用,使得刮板輸送機的圓環鏈發生磨損變形,從而發生接觸位置的斷裂,影響刮板輸送機的正常工作。
4 結論
①本文通過理論分析對刮板輸送機的圓環鏈間及鏈環與鏈輪間的嚙合過程進行分析,且對其接觸的受力情況進行分析,為后續的數值模擬研究建立基礎;②利用abaqus數值模擬軟件對鏈輪應力及速度云圖進行分析發現,應力的最大值為524MPa,鏈輪平穩運行時,鏈輪的鏈窩在接近立環的位置出現應力216MPa,鏈輪平穩運行。在嚙入端的鏈環位置出現速度的最大值為0.86m/s;③利用數值模擬軟件對圓環鏈應力云圖進行分析發現,在圓環鏈的左平環位置出現最大應力為782MPa,鏈環的接觸位置由于驅動沖擊,極易發生磨損變形。