夾指鏈式殘膜回收機脫膜裝置設計與試驗
2020-08-12 13:41:00唐永飛趙永滿王吉奎
農業工程學報 2020年13期
關鍵詞:作業
唐永飛,趙永滿,2,王吉奎,2,王 征
夾指鏈式殘膜回收機脫膜裝置設計與試驗
唐永飛1,趙永滿1,2※,王吉奎1,2,王 征1
(1.石河子大學機械電氣工程學院,石河子 832003;2. 農業農村部西北農業裝備重點實驗室,石河子 832003)
針對現有殘膜回收機脫膜困難的問題,該研究設計了一種夾指鏈式殘膜回收機脫膜裝置,主要由刮板總成、曲柄搖桿機構和膜雜分離機構等組成,可一次性完成脫膜、膜雜分離和輸膜作業。為增加夾指隨夾指鏈轉過上收膜輪的過程中與刮板接觸的次數,將刮板總成中的刮板設為雙層,并通過作業過程分析對其結構參數進行設計;使用ADAMS軟件對刮板末端運動軌跡進行仿真分析,并根據仿真結果對曲柄搖桿機構的桿件長度及安裝角進行設計;通過對殘膜受力情況的分析,確定了曲柄搖桿機構的安裝位置;通過運動學分析獲得了夾指不被漏刮時上收膜輪角速度與曲柄角速度比的最大值;為實現輸膜與膜雜分離,設計了往復擺動式膜雜分離機構,并通過作業機理分析及性能試驗對相關部件的結構參數進行設計。田間試驗結果表明,當機具作業速度為4.5 km/h、刮板寬度為100 mm、曲柄回轉中心與上收膜輪中心間的水平安裝距離為290 mm、豎直安裝距離為200 mm、上收膜輪角速度與曲柄角速度比為0.5、輸膜篩相鄰棒條間的安裝距離為50 mm時,殘膜回收率為93.12%,脫膜率為98.2%,含雜率為16.08%,能夠滿足殘膜回收機田間作業要求。研究成果可為相關裝置的設計提供參考。
農業機械;設計;殘膜回收;脫膜裝置;曲柄搖桿機構
0 引 言
地膜覆蓋栽培技術具有增加地表積溫、保證農田土壤墑情、抑制雜草生長等多種作用,可有效改善作物生長環境,顯著提高農業生產經濟效益[1-4]。但由于使用后的地膜無法得到有效回收,且在自然條件下極難自行降解,致使土壤中廢舊地膜的殘留量逐年增加,對作物的生長發育造成了嚴重影響[5-9]。因此,回收農田土壤中的殘留地膜已成為目前亟需解決的問題之一。
殘膜回收方法主要有人工回收與機械回收,人工回收作業效率低、用工成本高,且組織困難;而機械回收作業效率高、成本低,是目前治理殘膜污染問題的重要手段之一[10-13]。為解決殘膜污染問題,國內學者已研制出多種類型的殘膜回收機,這些殘膜回收機主要由起膜裝置、收膜裝置和脫膜裝置等作業部件組成[14-18]。因殘膜具有質地柔軟、靜電吸附性強等特點,一旦作業過程中脫膜環節出現問題,便會引發殘膜纏繞,影響整機作業效果,因此脫膜裝置的設計是殘膜回收機研制的關鍵環節之一。現有殘膜回收機的脫膜裝置主要采用氣力脫膜、伸縮桿齒脫膜和刮板脫膜等結構[19-24]。氣力脫膜裝置結構簡單、效率高,但極易引發二次纏繞;伸縮桿齒脫膜裝置結構復雜、制造成本較高,且作業過程中桿齒易形變,影響脫膜效果;刮板脫膜裝置結構簡單可靠,應用前景較好。但現有刮板脫膜裝置大多采用滾筒式結構,作業時刮板做回轉運動,脫下的殘膜在刮板產生的氣流作用力及靜電吸附力作用下很容易二次纏繞在脫膜裝置上。
課題組前期設計了一種夾指鏈式殘膜回收機,該機采用夾持原理進行收膜,作業時對殘膜的完整性與力學性能要求較低,且具有作業速度快、所需農機動力小等優點[25-26]。針對該機的脫膜環節,本文在對傳統滾筒式刮板脫膜裝置進行技術改進的基礎上,設計了一種由曲柄搖桿機構驅動的脫膜裝置,預期可實現脫膜、輸膜與膜雜分離作業,具有結構簡單、脫膜效果好、不易二次纏繞等優點。通過理論分析與試驗研究確定脫膜裝置的合理結構與作業參數,以期為提高機械化殘膜回收技術水平提供參考。
1 整機結構與工作原理
1.1 整機結構
夾指鏈式殘膜回收機主要由機架、秸稈粉碎裝置、秸稈輸送裝置、收膜裝置、脫膜裝置、集膜箱和傳動系統組成,其結構示意圖如圖1所示。
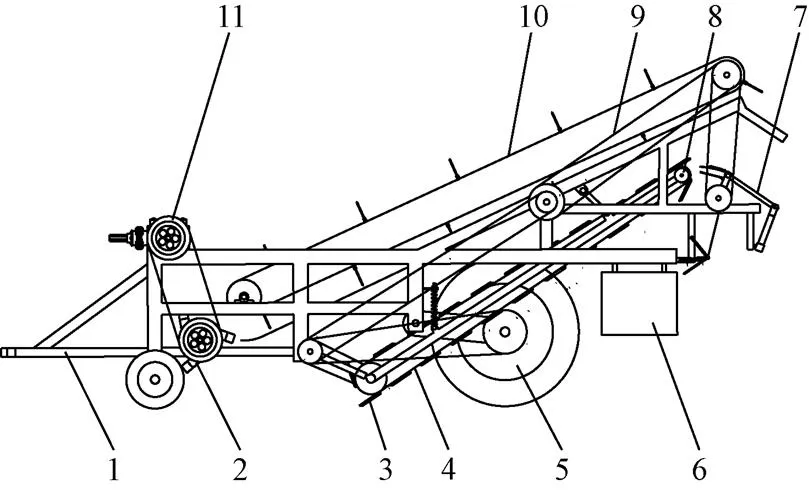
1.機架 2.秸稈粉碎裝置 3.夾指 4.夾指鏈 5.地輪 6.集膜箱 7.脫膜裝置 8.上收膜輪 9.傳動系統 10.秸稈輸送裝置 11.變速箱
1.2 工作原理
作業時,殘膜回收機在拖拉機的牽引下沿棉行前進,拖拉機動力輸出軸通過變速箱將動力傳遞至秸稈粉碎裝置,地輪通過傳動系統將動力傳輸至收膜裝置、脫膜裝置和秸稈輸送裝置,秸稈粉碎裝置將棉行表面的棉桿粉碎,并通過秸稈輸送裝置將粉碎后的棉桿、鈴殼等混合物拋灑至機具后方。隨后,收膜裝置中的夾指及夾指鏈將地表的殘膜夾起并向上輸送。當殘膜被夾持輸送至上收膜輪處時,夾指在轉過上收膜輪的過程中逐漸張開,部分殘膜在重力作用下自行脫落。隨著脫膜裝置的往復運動,刮板與夾指及夾指鏈接觸,將未脫落的殘膜刮落并推送至集膜箱上方。夾指鏈式殘膜回收機具體收膜過程參見文獻[25-26]。
1.3 主要技術參數
根據新疆地區棉花種植模式及殘膜回收機國家標準GB/T 25412-2010[27],夾指鏈式殘膜回收機主要技術參數如表1所示。
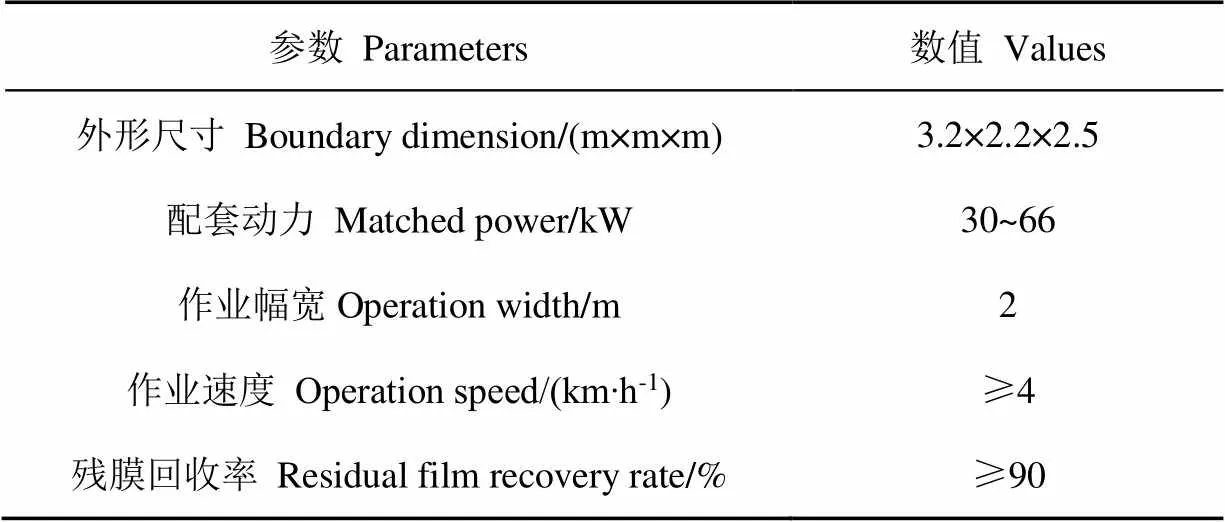
表1 夾指鏈式殘膜回收機主要技術參數
2 脫膜裝置設計與分析
脫膜裝置是殘膜回收機的重要組成部分之一,針對傳統滾筒式刮板脫膜裝置作業過程中脫下的殘膜易在刮板產生的氣流作用力及靜電吸附力作用下二次纏繞脫膜裝置的問題,本文從改變刮板運動狀態的角度出發,設計一種由曲柄搖桿機構驅動的脫膜裝置,主要由刮板總成、曲柄搖桿機構和膜雜分離機構組成,其結構示意圖如圖2所示。
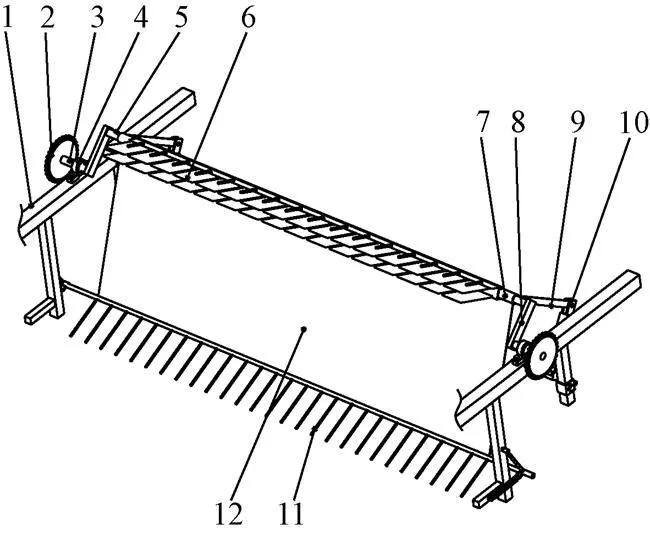
1.機架 2.傳動鏈輪 3.傳動軸 4.軸承座 5.曲柄軸 6.刮板總成 7.曲柄軸軸套 8.曲柄 9.連桿 10.搖桿 11.膜雜分離機構 12.擋膜簾
其中,曲柄搖桿機構中的曲柄通過傳動軸上的軸承座對稱安裝在機架兩側,兩曲柄內側連接有曲柄軸,曲柄軸外安裝有曲柄軸軸套,連桿焊接在曲柄軸軸套上,通過曲柄軸軸套與曲柄軸鉸接,搖桿鉸接在機架與連桿之間,傳動鏈輪位于兩側傳動軸端部。刮板總成安裝在曲柄軸軸套上,膜雜分離機構通過擋膜簾聯接曲柄軸軸套。
機組作業時,傳動系統通過兩側傳動鏈輪帶動刮板總成隨曲柄搖桿機構運動,同時曲柄搖桿機構通過擋膜簾帶動膜雜分離機構往復擺動。在曲柄搖桿機構的驅動下,刮板總成在上收膜輪處向下平移,與夾指及夾指鏈接觸并發生相對運動,而后再回抽復位,在此過程中,粘附在夾指與夾指鏈間的殘膜被刮落至膜雜分離機構,在膜雜分離機構的作用下,殘膜表面的土壤和秸稈等雜質掉落,含有少量雜質的殘膜被推送至集膜箱上方,從而實現脫膜、輸膜與膜雜分離作業。
2.1 刮板總成設計
作業時,刮板總成固定安裝在曲柄搖桿機構的前端,在曲柄搖桿機構的驅動下往復運動,當刮板運動至上收膜輪處時,從夾指后側將粘附在夾指與夾指鏈間的殘膜刮落。與滾筒式刮板脫膜裝置相比,在轉速相同的條件下,由曲柄搖桿機構驅動的刮板與夾指及夾指鏈接觸的頻率降低,這會對脫膜效果產生影響,僅提高曲柄轉速以增加接觸頻率又會產生殘膜撕裂、機具振動等問題,因此從增加刮板層數的角度對刮板總成進行設計。隨著刮板層數的增加,單個夾指隨夾指鏈轉過上收膜輪的過程中受刮板作用的次數增加,強化脫膜效果,但刮板層數過多會導致殘膜與刮板分離困難,且整機動力消耗增加。綜合考慮后將刮板設為雙層排列結構,其結構示意圖如圖3所示。
刮板總成主要由安裝架、刮板和加強筋等組成。刮板有2層,每層18片,由撓性與耐磨性較好的普通平帶制成,均布于安裝架上下兩側,上下層刮板間的安裝間隙1為50 mm,刮板軸向安裝距離1為120 mm。相鄰刮板間預留有安裝間隙,作業過程中分別與夾指及夾指鏈相對,安裝間隙1的大小對脫膜效果有直接影響,1過小時,夾指及夾指鏈通過性降低,導致整機動力消耗增加,刮板磨損加快,此外還會夾帶殘膜;1過大時,刮板無法有效接觸到夾指及夾指鏈,影響脫膜效果。綜合考慮脫膜效果及通過性,相鄰刮板間的安裝間隙1取20 mm,則可計算出刮板寬度2為100 mm。刮板的長度對脫膜效果也有一定影響,由于脫膜時夾指繞上收膜輪做回轉運動,當刮板長度過小時,無法從夾指根部開始脫膜。夾指末端回轉半徑約為180 mm,上收膜輪半徑為50 mm,因此刮板長度應不小于130 mm[25-26]。此外作業過程中受空氣作用力與慣性力影響,刮板會發生形變,刮板過長,會導致刮板脫膜過程中的形變增大,影響脫膜性能。前期樣機試驗表明,刮板長度1取150 mm時可以順利作用至夾指根部,且作業過程中刮板形變較小。加強筋固定在安裝架上,由直徑6 mm的45 #圓鋼制成,長度2為100 mm,可有效延長刮板使用壽命,減小刮板與夾指及夾指鏈接觸時的形變,保證脫膜效果。
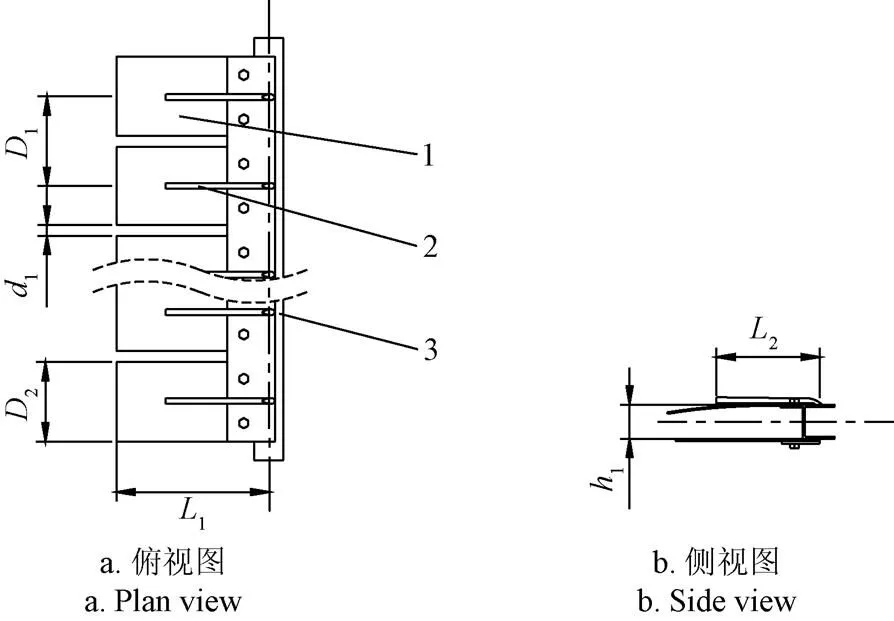
1.刮板 2.加強筋 3.安裝架
1.Scraper 2.Stiffener 3.Mounting frame
注:1為刮板軸向安裝距離,mm;2為刮板寬度,mm;1為相鄰刮板間的安裝間隙,mm;1為刮板長度,mm;2為加強筋長度,mm;1為上下層刮板間的安裝間隙,mm。
Note:1is the axial mounting distance of scraper, mm;2is the width of scraper, mm;1is the mounting clearance between adjacent scraper, mm;1is the length of scraper, mm;2is the length of stiffener, mm;1is the mounting clearance between upper and lower layer scrapers, mm.
圖3 刮板總成結構簡圖
Fig.3 Structure diagram of scraper assembly
2.2 曲柄搖桿機構設計
由于曲柄搖桿機構能夠實現復雜的運動,且具有結構簡單、加工方便、從動件運動規律可調性好等優點,因此選用曲柄搖桿機構作為脫膜裝置的驅動機構。其結構示意圖如圖4所示,其中為曲柄,為連桿,為搖桿,為機架,為連桿的延長部分,代表刮板。作業時,曲柄搖桿機構在傳動系統帶動下往復運動,從而使得部分的刮板在特殊的運動軌跡下與運動至上收膜輪處的夾指及夾指鏈接觸,將殘膜刮落。曲柄搖桿機構的結構與作業參數對脫膜效果有直接影響,本文對其進行具體分析。
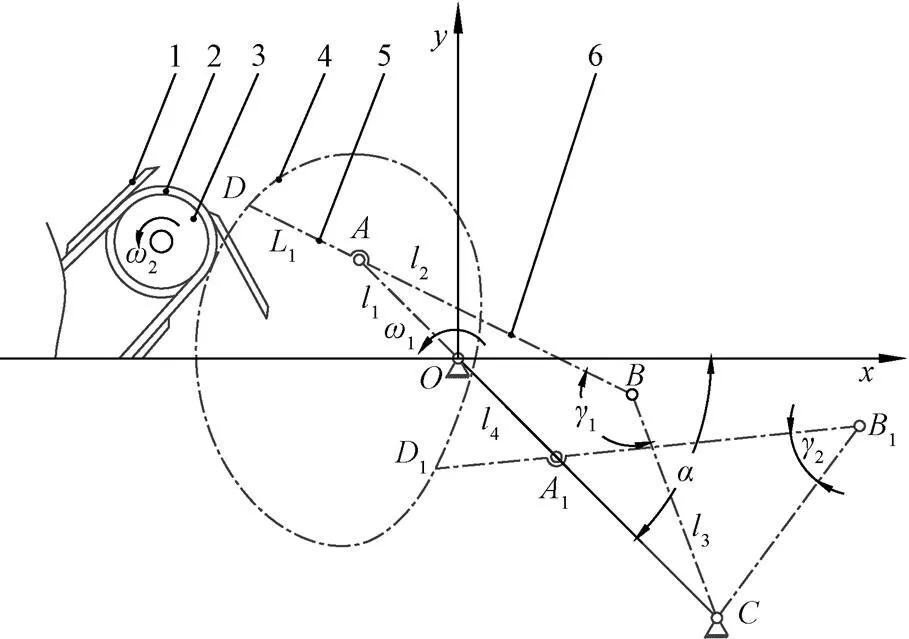
1.夾指 2.夾指鏈 3.上收膜輪 4.刮板末端運動軌跡 5.刮板 6.曲柄搖桿機構
1.Clamping finger 2.Clamping finger-chain 3.Upper film collecting wheel 4.Motion trajectory of scraper endpoint 5.Scraper 6.Crank-rocker mechanism
注:為曲柄的回轉中心;為曲柄與連桿的鉸接點;為連桿與搖桿的鉸接點;為搖桿與機架的鉸接點;為刮板的末端;1為刮板的長度,mm;1為曲柄的長度,mm;2為連桿的長度,mm;3為搖桿的長度,mm;4為機架的長度,mm;1為曲柄的角速度,rad·s-1;2為上收膜輪的角速度,rad·s-1;為曲柄搖桿機構的安裝角,(°);與111分別為曲柄與機架共線時各桿的位置;1與2分別為曲柄與機架共線時的傳動角,(°)。
Note:is the rotation center of crank;is the hinge point of crankand connecting rod;is the hinge point of connecting rodand rocker;is the hinge point of rockerand frame;is the endpoint of scraper;1is the length of scraper, mm;1is the length of crank, mm;2is the length of connecting rod, mm;3is the length of rocker, mm;4is the length of frame, mm;1is the angular speed of crank, rad·s-1;2is the angular speed of upper film collecting wheel, rad·s-1;is the mounting angle of crank-rocker mechanism, (°);and111are the positions of each rod respectively when crankand frameare collinear;1and2are the transmission angles when crankand frameare collinear, (°).
圖4 曲柄搖桿機構示意圖
Fig.4 Schematic diagram of crank-rocker mechanism
2.2.1 桿長與安裝角確定
以圖4中曲柄回轉中心點為原點,曲柄同軸正方向重合時的位置作為位移和時間的起始相位,則刮板端點在任意時刻的位置可表示為[28]
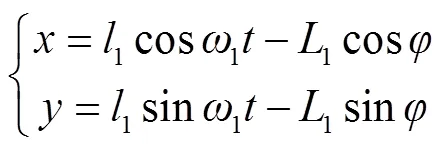
其中
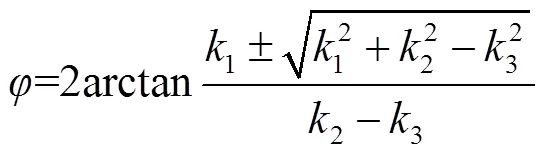


對于式(2),當0≤(1+)<π時為正值,當π≤(1+)<2π時為負值。
與滾筒式刮板脫膜裝置相比,由曲柄搖桿機構驅動的刮板與夾指及夾指鏈接觸的頻率較低,因此為保證脫膜效果,需要刮板在單個回轉周期內盡可能多地與夾指及夾指鏈重合,且重合過程中夾指呈張開狀態,由圖4中夾指及夾指鏈的分布情況可知,脫膜過程中刮板末端運動軌跡相對于軸正方向需有一定前傾,且軌跡曲線應整體平滑。由式(1)~(5)可知,刮板末端運動軌跡的形狀主要與曲柄搖桿機構中的各桿件長度及安裝角有關。
受機架空間結構和脫膜裝置的安裝位置的限制[29-30],初步確定曲柄長度1=170 mm,連桿長度2=370 mm,搖桿長度3=290 mm。根據曲柄搖桿機構中曲柄存在的條件,圖4中各桿件長度應滿足
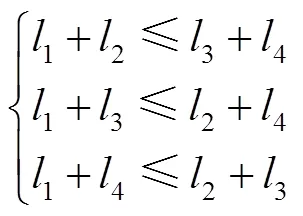
此外,為保證驅動機構的傳力性能,還應滿足[31]

將1、2與3的值代入式(6)~(7)后計算可得機架長度4的取值范圍為250~446.2 mm。
將圖4中搖桿與機架鉸接點的位置設為變量,使用ADAMS軟件仿真得出點在不同位置時刮板末端相對于機架的運動軌跡,并依此分析機架長度4及安裝角對刮板末端運動軌跡及脫膜效果的影響,確定其取值。經過大量試驗對比,選取5組較具代表性的刮板末端運動軌跡,如圖5所示,表2為各軌跡曲線對應的曲柄搖桿機構的結構參數。
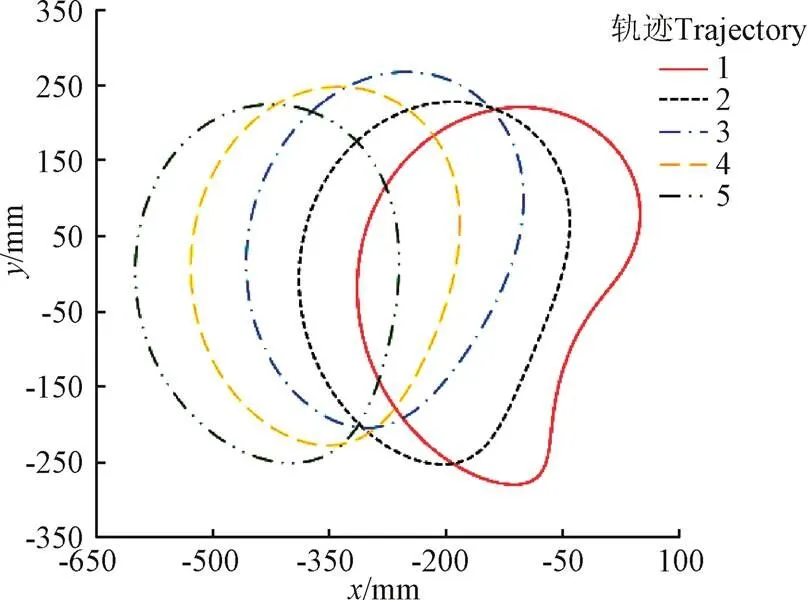
注:x為刮板末端水平方向位移,mm;y為刮板末端豎直方向位移,mm。
對圖5中軌跡1、軌跡2與軌跡4分析后發現,在安裝角不變的情況下,隨著機架長度4的增加,軌跡中需與夾指及夾指鏈接觸部分的形狀變化不明顯,但軌跡整體逐漸由不規則的“凸輪”狀轉變為較圓滑的“橢圓”狀,曲柄搖桿機構運動過程中的穩定性得到改善,綜合考慮,確定機架長度4=445 mm。
對軌跡3、軌跡4與軌跡5分析后發現,在機架長度4一定的情況下,隨著安裝角的減小,軌跡曲線整體呈逆時針旋轉的變化趨勢,致使軌跡曲線中與夾指及夾指鏈接觸的部分相對于軸正方向的前傾程度不斷減小,降低了刮板運動過程中與夾指及夾指鏈之間的重合度。此外在仿真過程中發現,除刮板末端運動軌跡的形狀外,安裝角對刮板在脫膜過程中的姿態也有直接影響。在其他條件一定的情況下,安裝角越大,刮板運動至脫膜位置時與豎直方向的夾角越小,這會導致刮板與夾指及夾指鏈的接觸時的形變增大,影響脫膜效果。綜合考慮后,確定安裝角=45°。
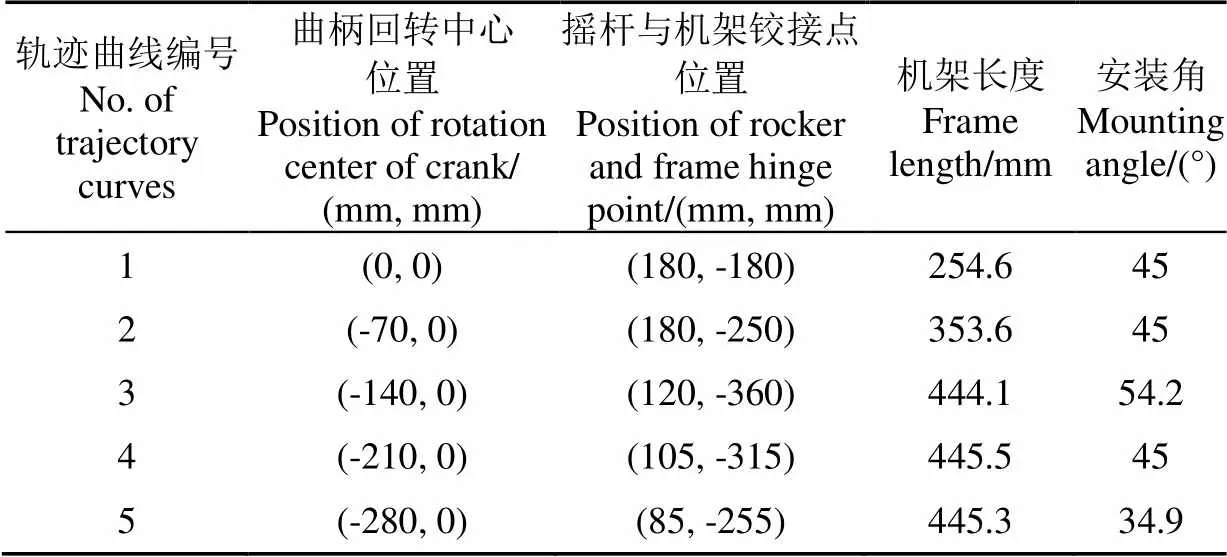
表2 各軌跡曲線對應的曲柄搖桿機構位置與參數
2.2.2 曲柄搖桿機構安裝位置確定
曲柄搖桿機構與上收膜輪相對位置關系如圖6所示,作業時刮板末端運動軌跡與上收膜輪外圓相切,使得刮板可在不與上收膜輪干涉的情況下盡可能多地與夾指及夾指鏈重合。
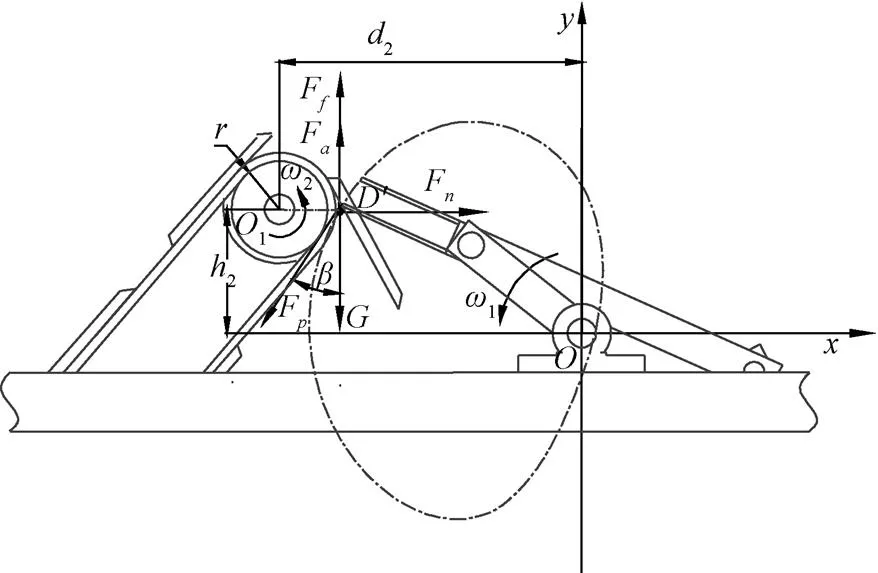
注:O1為上收膜輪中心;為刮板末端運動軌跡與上收膜輪的切點;Fn為夾指鏈對殘膜的支持力,N;Fp為刮板對殘膜的作用力,N;Ff為殘膜所受摩擦力,N;Fa為殘膜所受的粘附力,N;G為殘膜的重力,N;β為刮板對殘膜的作用力與豎直向下方向的夾角,(°);r為上收膜輪半徑,mm;d2為曲柄回轉中心與上收膜輪中心間的水平安裝距離,mm;h2為曲柄回轉中心與上收膜輪中心間的豎直安裝距離,mm。


其中
式中為殘膜與夾指鏈之間的摩擦系數。
將式(10)~(11)代入式(9)可得


2.2.3 曲柄角速度確定
由圖6可知,作業過程中曲柄與上收膜輪回轉方向相同,因此為避免脫膜過程中出現單夾指與夾指鏈間的殘膜被刮板漏刮的情況,刮板復位過程中夾指鏈沿上收膜輪轉過的長度應小于等于夾指在夾指鏈上的安裝間距,即

將安裝間距?=180 mm,上收膜輪半徑=50 mm代入式(13),計算可得2/1≤0.57。分析可知,上收膜輪角速度與曲柄角速度的比值越小,刮板復位過程中夾指鏈轉過上收膜輪的距離越短,脫膜效果越好,但比值過小,會導致機具正常作業時的穩定性降低。綜合考慮后,取2/1=0.5。為保證機具作業效率及運行的穩定性,經過多次試驗論證,得到機具作業最大作業速度為4.5 km/h,因此取機具作業速度=1.25 m/s,根據文獻[25-26]取=2,計算可得上收膜輪角速度2=12.5 rad/s,則曲柄角速度1=25 rad/s。
2.3 膜雜分離機構設計
機具作業過程中,脫下后的殘膜受氣流作用力的影響很難準確落入機架下方的集膜箱中,此外回收后殘膜中的土壤和秸稈含量較高。針對該問題,本文設計了一種膜雜分離機構,主要由擋膜簾、輸膜篩、擺桿和復位彈簧組成,其結構如圖7a所示。擋膜簾由長度為1 900 mm、寬度為600mm的滌綸纖維帆布制成,其長邊的一側聯接曲柄軸軸套,另一側聯接輸膜篩篩架,作用是防止脫膜過程中殘膜在刮板產生的氣流作用力及靜電吸附力作用下纏繞脫膜裝置。輸膜篩通過擺桿鉸接在機架上,回位彈簧聯接輸膜篩與機架,作業時輸膜篩在擋膜簾帶動下往復擺動,進行輸膜與膜雜分離作業。
由于殘膜與雜質外形尺寸相差較大,因此輸膜篩在擺動過程中可通過其端部將殘膜向前推送至集膜箱上方,而土壤和秸稈穿過輸膜篩篩面掉落至地表,從而實現輸膜與膜雜分離。這就要求輸膜篩端部對殘膜有一定支撐度,且擺動過程中易與殘膜分離,不會纏繞與回帶殘膜,經前期對比試驗發現棒條狀篩面相對符合要求,因此輸膜篩選用棒條結構,如圖7b所示。

1.擋膜簾 2.擺桿 3.復位彈簧 4.機架 5.雜質 6.輸膜篩 7.殘膜 8.篩架 9.篩面
1.Curtain of separating film 2.Swing rod 3.Reset spring 4.Frame 5.Impurities 6.Film transport sieve 7.Residual film 8.Sieve frame 9.Sieve surface
注:2為擺桿與機架的鉸接點;3為曲柄回轉中心與鉸接點間的水平距離,mm;3為曲柄回轉中心與鉸接點間的豎直距離,mm;3為擺桿長度,mm;為擺桿擺角,(°)。
Note:2is the hinge point of swing rod and frame;3is the horizontal distance between rotation center of crank and hinge point, mm;3is the vertical distance between rotation center of crank and hinge point, mm;3is the length of swing rod, mm;is the swing angular of swing rod, (°).
圖7 膜雜分離機構及輸膜篩示意圖
Fig.7 Schematic diagram of film-impurity separation mechanism and film transport sieve
輸膜篩篩面中的棒條由直徑5 mm的45 #圓鋼切割制成,通過焊接均勻固定在篩架上,篩面總長為1 900 mm。相鄰棒條間的安裝距離與棒條長度對輸膜與膜雜分離效果有直接影響,相鄰棒條間的安裝距離越大,土壤和秸稈越不容易壅堵在篩面上,但安裝距離過大,會導致輸膜篩端部對殘膜的支撐效果降低,弱化輸膜效果。棒條長度越長,殘膜相對于土壤和秸稈被向前推送的距離越長,膜雜分離效果越好,但長度過長會導致長條狀殘膜進入相鄰棒條間空隙后難以與輸膜篩分離,影響輸膜效果。前期樣機田間試驗結果表明,輸膜篩相鄰棒條間的安裝距離為50 mm,棒條長度為200 mm時,輸膜與膜雜分離效果較好。
擺角的大小對輸膜與膜雜分離效果也有影響,擺角過小時,輸膜篩擺動過程中與殘膜分離不徹底,導致殘膜堆積在輸膜篩篩面上,影響輸膜與膜雜分離效果,而擺角過大時,會降低整機作業性能,加快擋膜簾與復位彈簧損耗。前期樣機試驗表明,當3=200 mm,3=300 mm,3=170 mm時,輸膜與膜雜分離效果較好,由圖7a中的幾何關系可計算出此時擺角的值約為40°。
3 田間試驗
3.1 試驗條件
為檢驗夾指鏈式殘膜回收機脫膜裝置的實際作業性能,2019年10月在新疆兵團農六師新湖農場22連收獲后的棉田中進行田間作業性能試驗,試驗裝置安裝在夾指鏈式殘膜回收機的機架后側,如圖8所示。試驗棉田為黏性土壤,平均含水率為17%(0~50 mm),平均土壤堅實度為2.7 kPa,地面整體情況良好,土地平整。田間地膜幅寬為2050 mm,厚度為0.008 mm,覆膜時間約為180 d,膜下滴灌帶已回收,地膜表面有少量破損,且留有覆土及作物莖葉,地表秸稈余留高度為800~900 mm。試驗選用約翰迪爾904型輪式拖拉機作為動力單元,此外配有皮尺(0~100 m)、電子臺秤(型號:TCS-100,量程100 kg,精度1 g)、土壤水分速測儀(型號:MS-10,精度0.1%)等設備。考慮作業質量與經濟效益,機組作業速度設定為4.5 km/h。

1.脫膜裝置 2.秸稈輸送裝置 3.收膜裝置 4.拖拉機
3.2 試驗方法
良好的收膜、脫膜與清雜效果是保證殘膜回收機連續作業的必要條件,因此結合實際情況,試驗過程中選取殘膜回收率、脫膜率及含雜率作為夾指鏈式殘膜回收機的性能評價指標。試驗田內隨機選取1個膜幅進行5次重復驗證試驗,單次試驗的測試區長度為100 m。每次試驗結束后分別對集膜箱內的膜雜混合物與纏繞在收膜裝置上的殘膜進行收集與處理。各指標的計算如下[32-34]

式中1為殘膜回收率,%;2為脫膜率,%;3為含雜率,%;0為100 m長的同等型號新地膜的質量,g;1為集膜箱內膜雜混合物的總質量,g;2為集膜箱內殘膜的質量,g;3為纏繞在收膜裝置上的殘膜質量,g。
3.3 試驗結果與分析
夾指鏈式殘膜回收機田間試驗結果如表3所示。
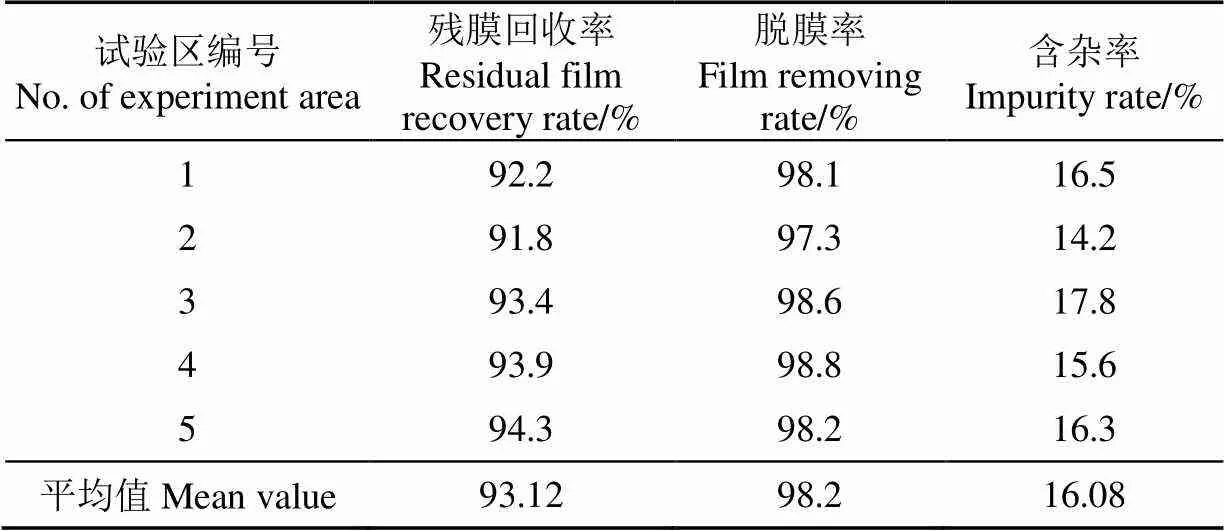
表3 田間試驗結果
由表3可以看出,當機具作業速度為4.5 km/h、刮板寬度為100 mm、曲柄回轉中心與上收膜輪中心間的水平安裝距離為290 mm,豎直安裝距離為200 mm、上收膜輪角速度與曲柄角速度比為0.5、輸膜篩相鄰棒條間的安裝距離為50 mm時,夾指鏈式殘膜回收機作業時的平均殘膜回收率為93.12%,脫膜率為98.2%,含雜率為16.08%,能夠滿足殘膜回收機田間作業性能要求。機具連續進行過程中狀況良好,刮板在曲柄搖桿機構的驅動下可順利將粘附在夾指與夾指鏈間的殘膜刮落,未出現殘膜二次纏繞的現象,膜雜分離機構可將脫下的殘膜順利推送至集膜箱上方,并在此過程中完成膜雜分離,減少了集膜箱內土壤和秸稈的質量,各部件功能與作業效果達到了設計的預期。
試驗過程中發現,當機具作業速度為4.5 km/h,上收膜輪角速度與曲柄的角速度比為0.5時,機具作業效果與整機狀況良好。當機具作業速度加快或上收膜輪角速度與曲柄角速度的比值減小時,機具作業效果依然良好,但整機出現振動現象。這是因為脫膜裝置中曲柄搖桿機構的質量分布不平衡,隨著作業速度的增加,由質量不平衡產生的系統慣性力不平衡現象加劇,導致整機產生振動。因此在今后的研究中還需對曲柄搖桿機構中各桿件的質量分布情況進行優化改進,提高機具在較高作業速度下的穩定性。受試驗環境與時間的限制,本次試驗只在現有的結構及作業參數下對樣機進行了性能驗證試驗,未深入探究脫膜裝置在不同結構與作業參數組合下的作業效果,因此在后續的研究中還需進行脫膜裝置結構與作業參數的優化試驗,進一步提高夾指鏈式殘膜回收機脫膜裝置及整機的作業效果。
4 結 論
1)本文針對現有殘膜回收機脫膜困難的問題,結合夾指鏈式殘膜回收機設計了一種脫膜裝置,主要包括刮板總成、曲柄搖桿機構和膜雜分離機構,利用曲柄搖桿機構驅動刮板以特定的軌跡完成脫膜作業,并使用棒條狀輸膜篩完成輸膜和膜雜分離作業。
2)為增加夾指隨夾指鏈轉過上收膜輪的過程中與刮板接觸的次數,將刮板總成中的刮板設為雙層,并通過作業過程分析對其結構參數進行設計;使用ADAMS軟件對刮板末端運動軌跡進行仿真分析,并根據仿真結果對曲柄搖桿機構的桿件長度及安裝角進行設計;通過對殘膜受力情況的分析,確定了曲柄搖桿機構的安裝位置;通過運動學分析獲得了夾指不被漏刮時上收膜輪角速度與曲柄角速度比的最大值;為實現輸膜與膜雜分離,設計了往復擺動式膜雜分離機構,并通過作業機理分析及性能試驗對相關部件的結構參數進行設計。
3)田間試驗表明,當機具作業速度為4.5 km/h、刮板寬度為100 mm、曲柄回轉中心與上收膜輪中心間的水平安裝距離為290 mm、豎直安裝距離為200 mm、上收膜輪角速度與曲柄角速度比為0.5、輸膜篩相鄰棒條間的安裝距離為50 mm時,殘膜回收率為93.12%,脫膜率為98.2%,含雜率為16.08%,機具連續作業過程中未出現殘膜二次纏繞的問題,能夠滿足殘膜回收機作業要求。
[1] 嚴昌榮,梅旭榮,何文清,等. 農用地膜殘留污染的現狀與防治[J]. 農業工程學報,2006,22(11):269-272.
Yan Changrong, Mei Xurong, He Wenqing, et al. Present situation of residue pollution of mulching plastic film and controlling measures[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(11): 269-272. (in Chinese with English abstract)
[2] 李元橋,何文清,嚴昌榮,等. 點源供水條件下殘膜對土壤水分運移的影響[J]. 農業工程學報,2015,31(6):145-149.
Li Yuanqiao, He Wenqing, Yan Changrong, et al. Effect of residual film on soil infiltration under drip irrigation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(6): 145-149. (in Chinese with English abstract)
[3] 溫浩軍,牛琪,紀超. 地膜機械化技術現狀及分析[J]. 中國農業大學學報,2017,22(3):145-153.
Wen Haojun, Niu Qi, Ji Chao. Current status and analysis of plastic film on the mechanical technology[J]. Journal of China Agricultural University, 2017, 22(3): 145-153. (in Chinese with English abstract)
[4] 畢繼業,王秀芬,朱道林. 地膜覆蓋對農作物產量的影響[J]. 農業工程學報,2008,24(11):172-175.
Bi Jiye, Wang Xiufen, Zhu Daolin. Influence of film mulching on crop chain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2008, 24(11): 172-175. (in Chinese with English abstract)
[5] 劉建國,李彥斌,張偉,等. 綠洲棉田長期連作下殘膜分布及對棉花生長的影響[J]. 農業環境科學學報,2010,29(2):246-250.
Liu Jianguo, Li Yanbin, Zhang Wei, et al. Distribution of residual film under long-term continuous cropping in oasis cotton field and its effect on cotton growth[J]. Journal of Agro-Environment Science, 2010, 29(2): 246-250. (in Chinese with English abstract)
[6] 董合干,劉彤,李勇冠,等. 新疆棉田地膜殘留對棉花產量及土壤理化性質的影響[J]. 農業工程學報,2013,29(8):91-99.
Dong Hegan, Liu Tong, Li Yongguan, et al. Effects of plastic film residue on cotton yield and soil physical and chemical properties in Xinjiang[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 91-99. (in Chinese with English abstract)
[7] 王志超,李仙岳,史海濱,等. 含殘膜土壤水分特征曲線模型構建[J]. 農業工程學報,2016,32(14):103-109.
Wang Zhichao, Li Xianyue, Shi Haibin, et al. Water characteristic curve model for soil with residual plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(14): 103-109. (in Chinese with English abstract)
[8] 解紅娥,李永山,楊淑巧,等. 農田殘膜對土壤環境及作物生長發育的影響研究[J]. 農業環境科學學報,2007,26(S1):153-156.
Xie Honge, Li Yongshan, Yang Shuqiao, et al. Influence of residual plastic film on soil structure, crop growth and development in field[J]. Journal of Agro-Environment Science, 2007, 26(S1): 153-156. (in Chinese with English abstract)
[9] 王志超,李仙岳,史海濱,等. 農膜殘留對土壤水動力參數及土壤結構的影響[J]. 農業機械學報,2015,46(5):101-106,140.
Wang Zhichao, Li Xianyue, Shai Haibin, et al. Effects of residual plastic film on soil hydrodynamic parameters and soil structure[J]. Transaction of the Chinese Society for Agricultural Machinery, 2015, 46(5): 101-106, 140. (in Chinese with English abstract)
[10] 曹肆林,王序儉,沈從舉,等. 殘膜回收機械化技術的專利分析研究[J]. 中國農機化,2009(4):48-50.
Cao Silin, Wang Xujian, Shen Congju, et al. Patent analysis on mechanization technology of retrieving the used plastic film[J]. Chinese Agricultural Mechanization, 2009(4): 48-50. (in Chinese with English abstract)
[11] 嚴昌榮,劉恩科,舒帆,等. 我國地膜覆蓋和殘留污染特點與防控技術[J]. 農業資源與環境學報,2014,31(2):95-102.
Yan Changrong, Liu Enke, Shu Fan, et al. Review of agricultural plastic mulching and its residual pollution and prevention measures in China[J]. Journal of Agricultural Resources and Environment, 2014, 31(2): 95-102. (in Chinese with English abstract)
[12] 趙巖,陳學庚,溫浩軍,等. 農田殘膜污染治理技術研究現狀與展望[J]. 農業機械學報,2017,48(6):1-14.
Zhao Yan, Chen Xuegeng, Wen Haojun, et al. Research status and prospect of control technology for residual plastic film pollution in farmland[J]. Transaction of the Chinese Society for Agricultural Machinery, 2017, 48(6): 1-14. (in Chinese with English abstract)
[13] 何文清,嚴昌榮,趙彩霞,等. 我國地膜應用污染現狀及其防治途徑研究[J]. 農業環境科學學報,2009,28(3):533-538.
He Wenqing, Yan Changrong, Zhao Caixia, et al. Study on the pollution by plastic mulch film and its counter measures in China[J]. Journal of Agro-Environment Science, 2009, 28(3): 533-538. (in Chinese with English abstract)
[14] 張慧明,陳學庚,顏利民,等. 隨動式秸稈還田與殘膜回收聯合作業機設計與試驗[J]. 農業工程學報,2019,35(19):11-19.
Zhang Huiming, Chen Xuegeng, Yan Limin, et al. Design and test of master-slave straw returning and residual film recycling combine machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(19): 11-19. (in Chinese with English abstract)
[15] 王旭峰,胡燦,魯兵,等. 拋膜鏈齒輸送式殘膜回收機設計與試驗[J]. 農業機械學報,2018,49(3):122-129.
Wang Xufeng, Hu Can, Lu Bing, et al. Design and experiment of sprocket conveying residual film recycling machine of casting film[J]. Transaction of the Chinese Society for Agricultural Machinery, 2018, 49(3): 122-129. (in Chinese with English abstract)
[16] 康建明,彭強吉,王士國,等. 彈齒式殘膜回收機撿拾裝置改進設計與試驗[J]. 農業機械學報,2018,49(S1):295-303.
Kang Jianming, Peng Qiangji, Wang Shiguo, et al. Improved design and experiment on pickup unit of spring-tooth residual plastic film collector[J]. Transaction of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 295-303. (in Chinese with English abstract)
[17] 劉旋峰,石鑫,郭兆峰,等. 滾筒式殘膜回收機的性能試驗研究[J]. 農業工程學報,2017,33(16):26-31.
Liu Xuanfeng, Shi Xin, Guo Zhaofeng, et al. Performance test on roller type residual film recycling machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(16): 26-31. (in Chinese with English abstract)
[18] 王科杰,胡斌,羅昕,等. 殘膜回收機單組仿形摟膜機構的設計與試驗[J]. 農業工程學報,2017,33(8):12-20.
Wang Kejie, Hu Bin, Luo Xin, et al. Design and experiment of monomer profiling raking-film mechanism of residual plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 12-20. (in Chinese with English abstract)
[19] 明光,畢新勝,王曉東,等. 夾持輸送式殘膜撿拾機氣力脫膜機理研究[J]. 中國農機化學報,2016,37(7):1-5.
Ming Guang, Bi Xinsheng, Wang Xiaodong, et al. Research on mechanism of air force separating residual film from gripping and delivering residual plastic film collector[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(7): 1-5. (in Chinese with English abstract)
[20] 由佳翰,張本華,溫浩軍,等. 鏟齒組合式殘膜撿拾裝置設計與試驗優化[J]. 農業機械學報,2017,48(11):97-104.
You Jiahan, Zhang Benhua, Wen Haojun, et al. Design and test optimization on spade and tine combined residual plastic film device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(11): 97-104. (in Chinese with English abstract)
[21] 劉進寶,鄭炫,趙巖,等. 殘膜撿拾壓縮車及其作業工藝設計與試驗[J]. 農業工程學報,2017,33(19):17-26.
Liu Jinbao, Zheng Xuan, Zhao Yan, et al. Design and experiment of operation process for collecting residual film compacted truck[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(19): 17-26. (in Chinese with English abstract)
[22] 靳偉,張學軍,鄢金山,等. 曲軸式棉田地表殘膜回收機撿膜特性分析及工作參數優化[J]. 農業工程學報,2018,34(16):10-18.
Jin Wei, Zhang Xuejun, Yan Jishan, et al. Characteristic analysis and working parameter optimization of crankshaft type cotton field surface residual film collecting machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(16): 10-18. (in Chinese with English abstract)
[23] 牛琪,紀超,趙巖,等. 集條殘膜打包機撿拾清理裝置設計與試驗[J]. 農業機械學報,2017,48(5):101-107.
Niu Qi, Ji Chao, Zhao Yan, et al. Design and experiment on collecting and separating device for strip plastic film baler[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(5): 101-107. (in Chinese with English abstract)
[24] 謝建華,張鳳賢,陳學庚,等. 弧形齒滾扎式殘膜回收機的設計及參數優化[J]. 農業工程學報,2019,35(11):26-37.
Xie Jianhua, Zhang Fengxian, Chen Xuegeng, et al. Design and parameter optimization of arc tooth and rolling bundle type plastic film residue collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(11): 26-37. (in Chinese with English abstract)
[25] 羅威,王吉奎,羅新豫,等. 夾指鏈式殘膜回收裝置仿形及收膜機構的改進設計與試驗[J]. 農業工程學報,2017,33(22):27-35.
Luo Wei, Wang Jikui, Luo Xinyu, et al. Improved design and experiment of profiling and recycling plastic film mechanism for clamping finger-chain type device of recycling residual plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(22): 27-35. (in Chinese with English abstract)
[26] 段文獻,王吉奎,李陽,等. 夾指鏈式殘膜回收裝置的設計及試驗[J]. 農業工程學報,2016,32(19):35-42.
Duan Wenxian, Wang Jikui, Li Yang, et al. Design and test of clamping finger-chain type device for recycling agricultural plastic film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 35-42. (in Chinese with English abstract)
[27] 中國機械工業聯合會. 殘地膜回收機標準:GB/T 25412- 2010[S]. 北京:中國標準出版社,2011
[28] 謝建華. 壟作殘膜撿拾及脫卸裝置的研究[D]. 北京:中國農業大學,2014.
Xie Jianhua. Study on Pick-up and Unloading Device for Residual Plastic Film of Bed Planting[D]. Beijing: China Agricultural University, 2014. (in Chinese with English abstract)
[29] 羅威,王吉奎,牛海龍,等. 夾指鏈式殘膜回收機清雜裝置的設計與試驗[J]. 農機化研究,2018,40(2):75-79.
Luo Wei, Wang Jikui, Niu Hailong, et al. Design and test on debris clean-up device of clamping finger-chain type device for recycling agricultural plastic film[J]. Journal of Agricultural Mechanization Research, 2018, 40(2): 75-79. (in Chinese with English abstract)
[30] 謝建華,段威林,張鳳賢,等. 桿齒式卸膜機構的設計及高速攝像試驗[J]. 機械設計,2019,36(5):60-64.
Xie Jianhua, Duan Weilin, Zhang Fengxian, et al. Design and high-speed photography test of pole-tooth film-unloading mechanism[J]. Journal of Machine Design, 2019, 36(5): 60-64. (in Chinese with English abstract)
[31] 孫桓. 機械原理[M]. 北京:高等教育出版社,2013:130-135.
[32] 施麗莉,胡志超,顧峰瑋,等. 耙齒式殘膜回收機自動脫膜機構設計[J]. 農業工程學報,2017,33(18):11-18.
Shi Lili, Hu Zhichao, Gu Fengwei, et al. Design on automatic unloading mechanism for teeth type residue plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(18): 11-18. (in Chinese with English abstract)
[33] 謝建華,唐煒,張學軍,等. 擺桿驅動式殘膜回收機的設計與參數優化[J]. 農業工程學報,2019,35(4):56-63.
Xie Jianhua, Tang Wei, Zhang Xuejun, et al. Design and parameter optimization of swing rod driven residual plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(4): 56-63. (in Chinese with English abstract)
[34] 謝建華,唐煒,曹肆林,等. 齒鏈復合式殘膜回收機設計與試驗[J]. 農業工程學報,2020,36(1):11-19.
Xie Jianhua, Tang Wei, Cao Silin, et al. Design and experiment of tooth chain compound residual film recovery machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(1): 11-19. (in Chinese with English abstract)
Design and experiment of film removing device for clamping finger-chain type residual film collector
Tang Yongfei1, Zhao Yongman1,2※, Wang Jikui1,2, Wang Zheng1
(1,,832003,;2,,832003,)
Film-mulching cultivation technology could significantly improve the growth condition of crops and increase the economic benefits of agricultural production. However, the residual film in soil is very difficult to degrade, and there is no effective recovery method, resulting in the amount of residual film in farmland soil gradually increased. The residual film currently has a serious impact on the ecological environment of farmland soil. To solve this problem, domestic scholars have devised a variety of residual film collectors. The design of film removing device was one of the key points in the development of the residual film collector. However, the existing residual film collectors mainly adopts the structure of pneumatic, telescopic rod tooth and rotary scraper, which could easily cause secondary winding of residual film during the film removing process. Thus, a film removing device of clamping finger-chain type for residual film collection was designed in this study. The device was consisted of scraper assembly, crank-rocker mechanism and film-impurity separation mechanism, which could complete the work of film removing, film-impurity separation, and film transport at one time. In order to increase the contact times between the finger and the scraper when the clamping finger-chain moved upward, a double-layer arrangement structure of scraper was adopted in the scraper assembly, and the structural parameters were designed through the analysis of the operation process. The ADAMS software was used to simulate and analyze the motion trajectory of the endpoint of the scraper, and the length of each rod and the mounting angle of the crank-rocker mechanism were designed. Through the force analysis of residual film, the mounting position of the crank-rocker mechanism was determined. Through the kinematics analysis, the maximum value of the angular speed ratio between the upper film collecting wheel and the crank when the fingers were not scratched was obtained. In order to achieve the film-impurity separation and film transport, a film-impurity separation mechanism with reciprocating swing type was designed, and the structural parameters of related components were designed based on the operation mechanism analysis and performance tests. The field experiments results showed that the residual film recovery rate was 93.12%, the film removing rate was 98.2%, and the impurity rate was 16.08%, when the travel speed of the collector was 4.5 km/h, the width of scraper was 100 mm, the horizontal mounting distance between the rotation center of crank and the center of upper film collecting wheel was 290 mm, the vertical mounting distance between the rotation center of crank and the center of upper film collecting wheel was 200 mm, the angular speed ratio between the upper film collecting wheel and the crank was 0.5, and the mounting distance of the bar in film transport sieve was 50 mm, The results indicated that the film removing device could meet the field operation requirements of the residual film collector. The research can provide the basis and reference for the development of relevant residual film collector.
agricultural machinery; design; residual film recovery; film removing device; crank-rocker mechanism
唐永飛,趙永滿,王吉奎,等. 夾指鏈式殘膜回收機脫膜裝置設計與試驗[J]. 農業工程學報,2020,36(13):11-19.doi:10.11975/j.issn.1002-6819.2020.13.002 http://www.tcsae.org
Tang Yongfei, Zhao Yongman, Wang Jikui, et al. Design and experiment of film removing device for clamping finger-chain type residual film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(13): 11-19. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.13.002 http://www.tcsae.org
2020-03-18
2020-06-10
國家自然科學基金資助項目(51765057)
唐永飛,主要從事農業機械設計及理論分析研究。Email:1074437968@qq.com
趙永滿,教授,博士,主要從事農業機械化工程研究。Email:zhrym@163.com
10.11975/j.issn.1002-6819.2020.13.002
S223.5
A
1002-6819(2020)-13-0011-09
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
