基于傾斜攝影測量的佛山某鎮房產測繪研究
2020-08-13 06:54:30萬銀錢
科技創新導報 2020年16期
萬銀錢

摘 ? 要:本文概述了傾斜攝影數據的獲取,像控點的布設及測量的具體要求,內業通過空中三角測量,對影像數據進行匹配,自動快速地建立三維模型,再利用繪圖軟件,對實景三維模型數據進行采集編輯,從而獲取房產調查的線劃圖。最后,通過對外業檢測點數據與內業采集的房產線劃圖數據進行精度對比,說明了傾斜攝影測量技術完全可以應用在城鎮房產調查領域。
關鍵詞:傾斜攝影測量 ?房產測繪 ?像控測量 ?三維模型
中圖分類號:P231 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1674-098X(2020)06(a)-0035-02
城鎮房產調查工作,由于時間緊任務重,利用傳統外業測繪方法遠遠不能滿足需求,考慮到航空攝影測量的優勢,本文利用航空攝影測量來進行該項工作的方法。傳統的航空攝影測量方法是從垂直角度獲取影像數據的,無法滿足房產調查的精度要求;而傾斜攝影測量是近年發展起來的一種全新技術,可以快速生成三維模型,既直觀又靈活,并能準確獲取房屋的權屬界線。
1 ?傾斜攝影
1.1 航攝儀
本文使用DM-402H 旋翼無人機, 搭載五鏡頭DM5-3600 航攝儀, 進行同步多視角傾斜攝影來獲取影像數據。
1.2 航線設計
佛山市某鎮房產調查面積6.65km2,17000多宗地,根據其形狀和范圍進行傾斜攝影的航線規劃,航線通常要求按東西向敷設,考慮到本項目的區域位置獨特,本次按照了南北方向敷設航線,共布設了113條航線,飛行31個架次,航片總數109810張。
1.3 參數設計
1.3.1 航攝高度的確定
根據項目區的特點,通過對該鎮建筑物高度及相關障礙物的情況進行現場分析,最終確定傾斜攝影測量的飛行相對高度為100m。由于地面分辨率和飛行高度存在以下幾何關系:
根據式(1)可以得出,同步獲取五個方向的影像地面分辨率分別是:垂直方向影像為1.4cm,前視、后視、左視、右視4個方向影像為1.0cm。
1.3.2 航攝重疊度的設置
根據任務的精度要求,設置航向重疊度為70%~80%,旁向重疊度為60%~70%。
1.3.3 區域覆蓋設計
航攝區域要覆蓋整個項目區域,考慮到區域邊緣地物的建模效果及精度,航攝時需要超出項目區域范圍線外3-4 條航線。
2 ?像控點及空中三角測量
2.1 像控點測量
2.1.1 像控點布設
像控點布設采用航攝前主動布設方式,考慮測區形狀、攝影航線,按照150m左右網格間距進行布控,點位選擇不同于傳統布點方式,本次點位宜選道路中間、視線開闊的空地上等,主要考慮地物的遮擋,盡量保證各個鏡頭的影像可見,共布設了247個點,像控點布設位置, 如圖1所示。
像控點的布設,具體點位視現場而定,一般利用制作好的模具進行現場布設標志,標志為“白色十字”,中心點位是圓黑點直徑為5 cm。
布設完像控點標志后應在現場拍攝2-3 張不同角度的照片,照片中要有明顯的參照物,這樣內業做空三加密比較方便快捷,節約找點時間。
2.1.2 像控點測量
像控點測量利用河北省衛星定位綜合服務系統(HBCORS)進行施測,按照GNSS RTK圖根級精度要求采用網絡RTK測量方式,點位中誤差不大于5cm,觀測兩測回。
進行網絡RTK 測量時,盡量保持衛星截至高度角15°以上,衛星個數不少于6,PDOP值小于4,觀測前要設置平面收斂閾值不超過2cm,高程收斂閾值不大于3cm。圖根控制點觀測兩測回,測回間要對儀器進行初始化,測回間的時間間隔要超過60s,每測回觀測值要在得到RTK 固定解且收斂穩定后開始記錄,測回間的平面坐標分量較差不大于2cm,垂直坐標分量較差不大于3cm。兩測回結果取平均值作為像控點測量最終成果。
2.2 空中三角測量
進行空中三角測量應分區計算,根據電腦配置、相片數量及控制點位置等因素進行分區,利用ContextCapture 軟件進行原始影像、相機參數、POS文件導入,軟件自動進行關鍵點提取、像對選擇、初始化外方位元素、自動連接點匹配、控制點參與光束法平差、色彩均衡等步驟來完成空中三角測量。通過空中三角測量計算,得到平均地面分辨率(Average ground resolution)為1.24cm,平差后像控點的誤差均值均為0.53個像素(pixels),都在1個像素內,空三加密成果均符合項目精度要求。
3 ?三維模型建立
三維模型的建立是利用河北省地質測繪院三維計算中心多臺服務器進行集群并算,自動化程度較高,可以24h不間斷運行。利用ContextCapture軟件,在空三加密成果的基礎上,提交三維重建,然后通過軟件自動密集影像匹配、三維TIN格網構建、白體三維模型的創建、自動紋理映射、紋理地圖集打包、細節層次生成等過程,生成實景三維模型成果,格式為OSGB。
4 ?數據采集
內業采用EPS 3D Survey 三維測圖系統軟件,將項目區內實景三維模型(OSGB)導入測圖系統,作業員根據實景三維模型數據進行房屋等要素的采集, 采集時采用正射影像與三維模型窗口聯動模式,圖2左圖為正射影像窗口,圖2右圖為實景三維模型窗口。
圖3是通過人工內業采集后,形成的房產數據圖,圖中的房屋結構、層數都表示得比較清楚,彌補了傳統航測不能實現的缺陷,這樣的數據成果可以大大提高農村集體土地使用權城鎮部分房產調查項目的生產效率。
5 ?精度分析
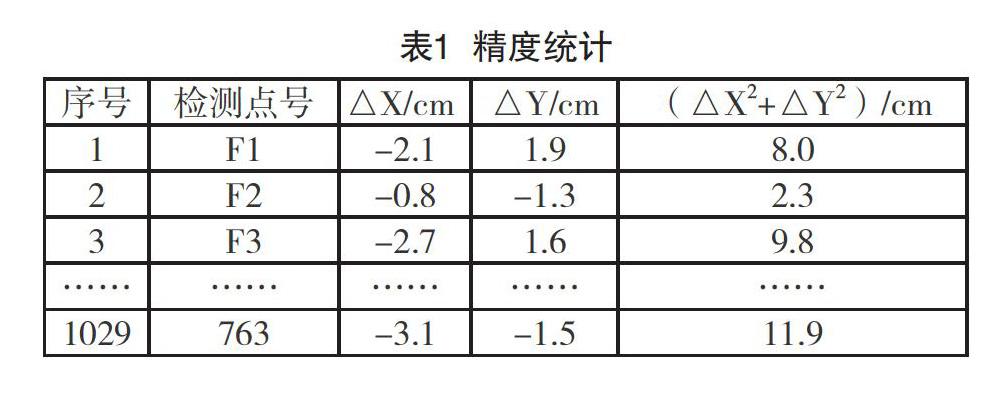
外業采用GPS-RTK和全站儀,主要對房角點、圍墻拐點等特征點進行了全野外平面坐標采集, 共采集外業檢測點1029個,與內業采集數據坐標進行了精度對比統計,精度統計情況如表1所示。
根據同精度檢測時,中誤差計算公式為:
式中:n為檢測點總數;為較差。
根據表1檢測點的情況,n=1029個,Σ總=23608.6cm,計算結果最終檢測點中誤差為3.4cm,滿足城鎮房產調查精度5.0cm的要求。
6 ?結語
目前,低空傾斜攝影測量技術在不動產房屋調查項目中處于起步階段,如此高分辨率影像數據的獲取是其他方法難以獲取的,傾斜攝影測量技術在相關工程項目中有一定的推廣應用價值。
參考文獻
[1] 路兵兵.房產測繪技術與測繪質量的控制[J].江西測繪,2014(9):66-68.
[2] 王盼攀.房產測繪大師GIS系統在房產測量中的應用[J].測繪技術裝備,2015(6):99-101.
[3] 郭嵐.無像控無人機傾斜攝影測量在農村地籍測量中的應用[J].測繪與空間地理信息,2019(4):55-58.
