基于無人機攝影測量的大比例尺測圖研究
2020-08-13 06:54:30楊慶振
科技創新導報 2020年16期
關鍵詞:無人機
楊慶振
摘 ? 要:無人機技術與航空攝影測量相結合,使得無人機航攝系統成為航空攝影領域的一個新型重要方向。本文以無人機攝影測量系統為研究對象,結合工程實例,詳細闡述利用“天行”八旋翼無人機的航攝影像制作 1:500 大比例尺地形圖的工作流程。然后以臨沂市蘭陵縣測區得到的航測數據為例,具體研究并分析了無人機航測數字線劃圖能達到的精度。
關鍵詞:無人機 ?攝影測量 ?精度 ?大比例尺測圖
中圖分類號:P231 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1674-098X(2020)06(a)-0047-02
隨著遙感技術和計算機技術的不斷更新、無人機技術迅猛發展,無人機攝影測量技術也應運而生。無人機攝影測量系統相比較于傳統的航空攝影測量系統。其獨特的優勢在于:第一,平臺構建容易,維護方便,成本在大幅度的降低;第二,無人機攝影測量系統體積小、重量輕、操作方便,飛機在起飛降落時不需要專門的起降機場,且可用多種方式起飛和降落,機動靈活;第三,受天氣條件和地面地貌狀況影響較小,作業方式相對比較安全,人工在地面控制飛行,使得無人機可進入危險地帶開展作業,從而降低工作人員的在作業過程中的風險;第四,無人機在飛行時航高低于載人飛機,且搭載的是非量測數碼相機,能快速、有效的獲得分辨率較高的遙感影像圖,方便用于觀察小范圍內地表地貌的細節變化,從而進行大比例尺地形圖的制作;第五,獲取影像速度快,后期作業流程化,簡單化,縮短了整個作業的周期,能夠快速獲取所需地圖產品。正是無人機攝影測量系統的這些優點,使其成為補充傳統航天攝影測量的一種重要手段,逐步得到測繪、地理信息等領域的廣泛關注,并被普遍應用在天氣的監測和預報、國土資源環境的調查、城市管理、海事信息化的建設與動態管理、災害預報、災害監測與評估、國家海洋權益保障、農業監測、電力維修、水利勘察等各個領域。
1 ?無人機影像獲取流程和技術路線
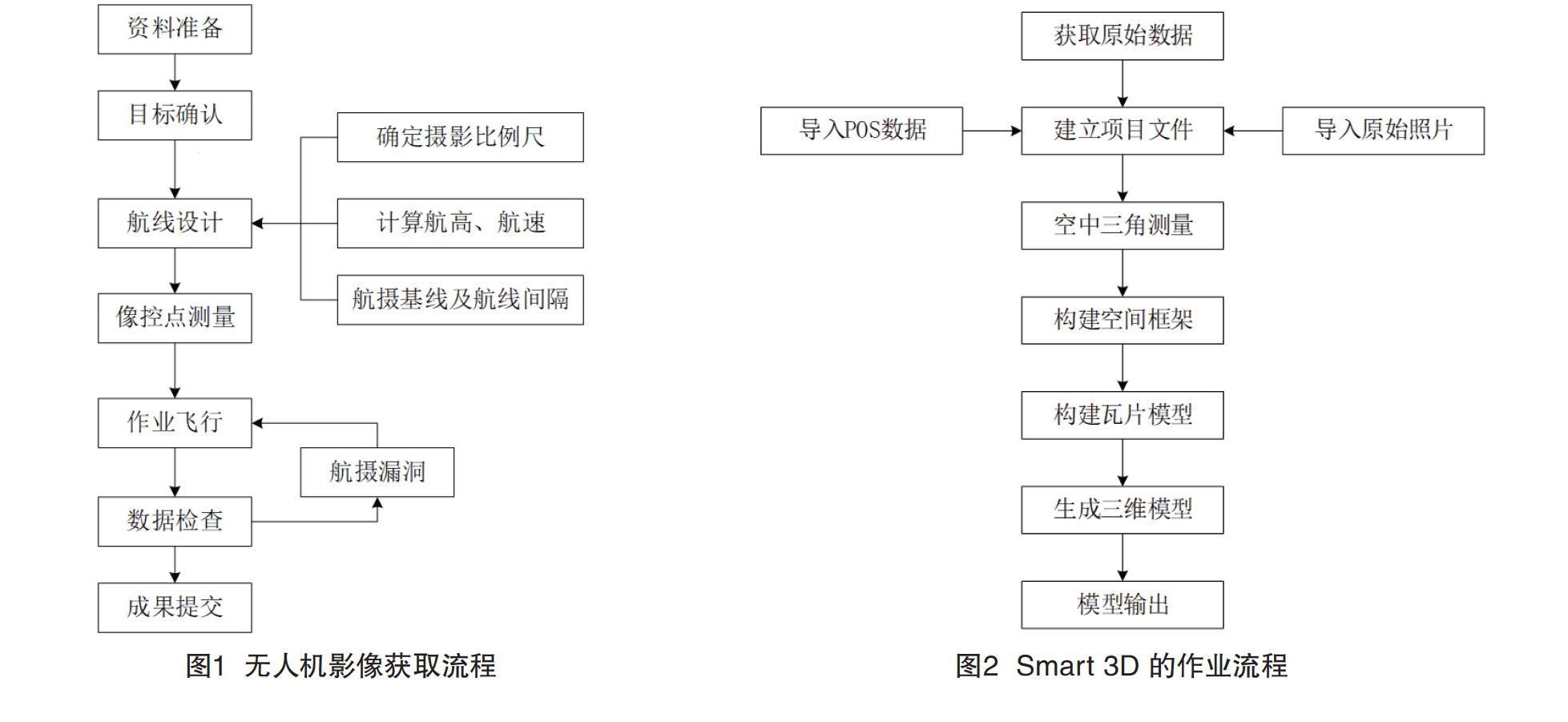
本文采用南方測繪“天行”八旋翼無人機搭載Sony RX1RM2數碼相機,在臨沂市蘭陵縣進行了生產作業,獲取無人機低空航攝遙感影像并完成1:500大比例尺地形圖的成圖。本次作業選用的數據處理軟件是Smart 3D三維實景建模軟件和清華山維EPS裸眼3D測圖軟件。無人機影像獲取流程如圖1所示。
1.1 測區概況
本次的作業區位于臨沂市蘭陵縣。測區屬于溫帶季風氣候,四季分明,春季干旱少雨,夏季溫熱多雨,秋季涼爽干燥,冬季寒冷少雪。本次作業任務是為了該地區前期的旅游開發項目做一個前期的勘察工作,項目面積約為3km2左右。
起飛前,需要對測區已有資料進行收集。本次作業測區的已有資料包括從相關部門收集到該地區已有三個控制點,可以作為布設像控點的起算點,本次作業控制點坐標系采用 1980年西安坐標系,1985高程基準。提前與甲方做好溝通并提供測區范圍線,并且告知地區的難度重點,以及最大的海拔高差等有關信息。
1.2 航線設計
航線設計確保無人機能夠按照預定軌道進行飛行作業,并保證飛行過程中的各種參數滿足相關軌跡。航線設計是否合理關乎最終成果,要嚴格按照相關規范進行設計,并做好復查工作,確保飛行過程的安全和飛行數據的可靠,本節主要是按照相關要求,計算出航線設計的所需參數。
1.3 外業像控點測量
為保證本次測量作業的精確,本次野外像控點的布設嚴格遵守野外像片控制點的布設原則,共布設了76個野外像控點,本次坐標系采用1980 年西安坐標系,1985 高程基準,中央子午線為 114°。其中三個已知控制點作為起算點,使用GPS-RTK結合溫州CORS 賬號進行平滑采集,計算結果平面、高程精度均滿足規范要求。
2 ?內業數據處理
得到的兩個測區的影像數據后,采用 Smart 3D 軟件進行內業數據處理,該軟件是一款集數據導入、空三加密、三維建模于一體的自動化航空影像處理軟件,該軟件自動化操作程度高,能夠生成應用于EPS裸眼3D測圖軟件的osgb瓦片格式的數據。通過該軟件生成的三維模型精度高、效果好,可以滿足大比例尺成圖所需要的模型的要求,Smart 3D軟件處理數據的流程見圖2。
2.1 航測原始數據的導入
首先將本次航測獲取到的記錄飛行姿態的POS數據、影像數據和像控點數據在數據導入界面導入到Smart 3D 中,完成航測數據的錄入工作。
2.2 空中三角測量
設置好像片的相關屬性后,選擇提交空中三角測量,可以設置空三的名稱,定位、參考方式以及其他設置等。如果對一次空三加密的計算結果不滿意,Smart 3D 可以進行多次提交空三加密,直到符合精度要求。本次試驗共進行了兩次空三加密。
2.3 構建三維模型
空三加密完成之后,開始進行三維模型的構建,Smart 3D 的三維模型構建高度自動化,本次構建需要生成的是OSGB 格式瓦片模型,為了加快生成模型的速度和精度,需要對整個測區的空間框架進行構建,選取生成的模型范圍。根據電腦性能和測區的實際情況,將整個測區共分為 49個瓦片。
隨后提交項目生產。Smart 3D可以生成三維網格、三維點云、正射影像和數字表面模型。根據不同生產項目的需要可以生產不同類型的數據。
2.4 數據成果
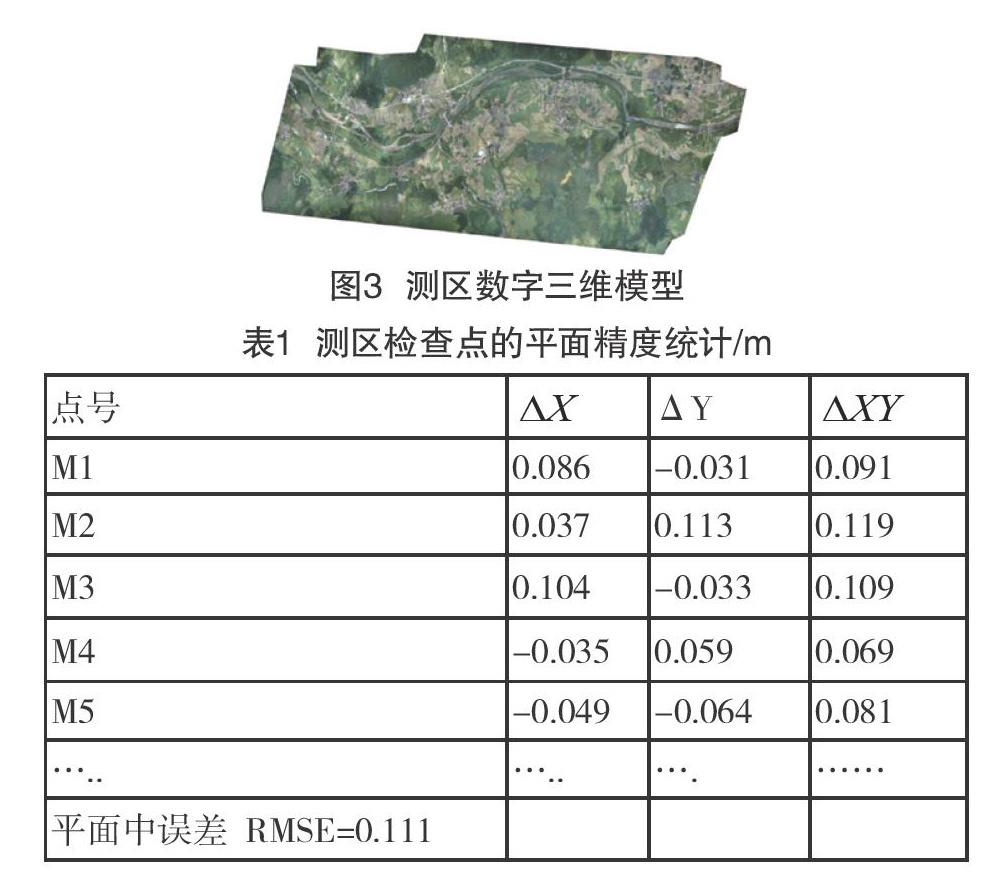
經過上述步驟,就完成了內業處理的整個步驟,再經過對后續成果整理和修飾,就可得到測區的數字三維模型。
3 ?精度分析
本文精度分析主要是利用GNSS-RTK 系統對測區內明顯的地物點實測其平面坐標和高程,然后在數字線劃圖上選取該點的圖上坐標和高程,最后利用中誤差計算公式計算其平面精度和高程精度。檢查點主要選取一些比較明顯、在像片上比較容易辨別的點,比如道路上斑馬線或者交通標志的垂直拐點、測區內平房的房屋拐點、硬化水泥路十字路口的交點等。
3.1 平面精度分析
利用GNSS-RTK 系統對測區內20個明顯的地物點實測其平面坐標和高程,然后在數字線劃圖上選取該點的圖上坐標和高程,最后利用中誤差計算公式計算其平面精度和高程精度,可以得到測區檢查點的平面精度統計結果如表1所示。
從上表可以得出測區平面精度統計結果:X方向中誤差為0.066m,最大誤差為-0.109m,Y方向中誤差為 0.089m,最大誤差為 0.155m,平面坐標中誤差為0.111m,最大誤差為0.199m,均滿足規范要求。
3.2 高程精度分析
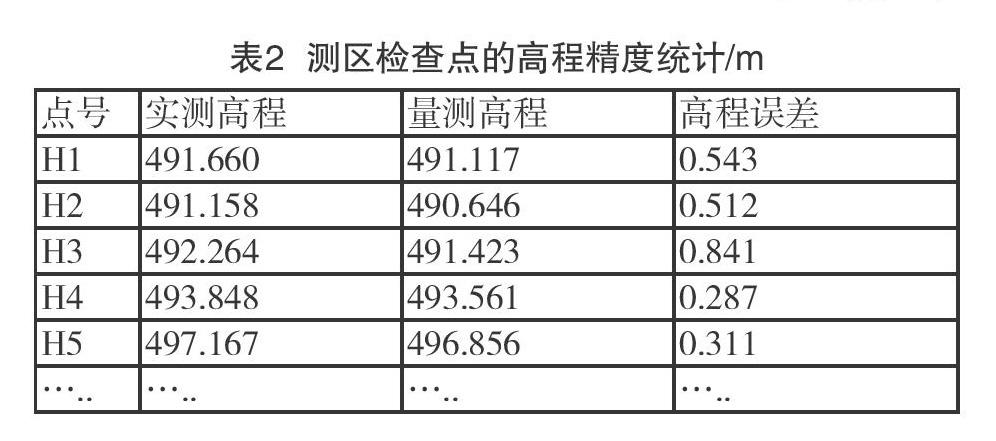
同樣可以算出測區的高程誤差和精度,如表2所示。
從表3可得,測區的高程中誤差為 0.275m,最大誤差為 0.439m,該測區地形起伏不大,大多屬于平地和丘陵地,滿足1:500 地形圖對高程精度要求。
4 ?結語
系統闡述了無人機攝影測量系統在大比例成圖中的完整流程,通過實例精度分析,可以得到結論:在控制好成圖過程誤差傳播,嚴格按照規范要求獲取影像數據,數據處理過程嚴格把關,無人機航測大比例尺地形圖可達到 1:500比例尺的成圖精度,尤其是在平原地區平面精度和高程精度都很高,可以在該地區應用于生產實踐。
參考文獻
[1] 吳勤書,趙卓文,張時智.新時代測繪地理信息服務于自然資源管理的思考[J].測繪通報,2019(S1):168-170.
[2] 穆增光,劉慧慧.大比例尺地理信息數據服務模式的研究[J].測繪與空間地理信息,2019,42(4):112-114.
[3] 張祖勛,陶鵬杰.談大數據時代的“云控制”攝影測量[J].測繪學報,2017,46(10):1238-1248.
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
