極地船舶與海冰作用方式及冰載荷求解概況
2020-08-14 09:13:30曲自信王昌朔陶舒暢
科技視界 2020年22期
曲自信 王昌朔 蘇 桐 黃 山 陶舒暢
0 引言
北極地區蘊含著極為豐富的資源。近年來,北極地區的冰量越來越低,穿越北極最短航線的開通成為現實。許多極地附近的國家都加大了對極地航行船舶的研發設計工作,包括環境預報、極地船舶結構設計、總體性能等等。同時由于極地寒冷多冰的自然環境,對整個極地船舶系統的適應性和可靠性也提出了嚴格的要求[1]。
作為海洋大國和海洋裝備制造的強國,面對日趨激烈的國際能源競爭,中國越來越重視極地船舶包括破冰船的自主研發能力。我國對極地航道及極地船舶的研發需求2013 年才正式提出。相對于近極地國家,我國極地冰區船舶研究尚處在起步階段,急需開展冰區航行船的研究工作。本文針對極地船舶進行文獻調研,討論海冰對極地船舶的作用及其強度問題。
1 極地船舶的特點
在極地及極地周邊地區航行的船舶,由于低冷的自然環境,海面固結成海冰,使極地船舶在方案設計、結構特性、材料性能、運動方式等方面有著特殊的要求。總的來說,極地船舶要有堅固的船體,即高要求的船體強度、破冰能力強、防寒性能好、抗御超低溫惡劣環境、強大的后勤補給、強勁的動力設備,來御預期冰況、結冰、低氣溫、高緯度、極晝/極夜、極端、偏遠等環境風險[2]。
2 極地船舶的分類
2.1 按功能分類
極地船舶按功能可分為極地運輸船、極地科學考察船、極地海洋工程船、破冰船[3]。
極地科學考察船是在南北極海域進行考察和研究,具有破冰能力的綜合測量考察船,如中國的"雪龍"號。極地運輸船主要是為北極航線全年候運行海工模塊等。如Yamal LNG 極地運輸船。極地海洋工程船主要用來進行極地海上油氣開發和能源利用。專業破冰船的主要作用是壓碎冰層,開辟航道。
2.2 按冰級分類
極地船舶需要應對極地嚴酷環境的挑戰,尤其是海冰的存在,對極地船舶結構提出來更高的挑戰[4]。為了保障極地船舶航運安全,世界上主要船級社(如 ABS,BV,DNV,LR,GL,CCS,NK)都制定了各自的冰級規范。在IACS(國際船級社)頒布的《極地船舶分類規范》中將極地航行船舶分為7 個級別,如表1,用來規范指導極地船舶的設計建造。
3 極地船舶的破冰方法
極地船舶在極地地區航行,必然要面對冰雪堆積的海洋環境,這也是極地船舶與常規船舶最大的區別,如何在冰封的海面航行,對極地船舶提出了特別的挑戰,極地船舶常見的破冰方法見表2。
隨著全回轉推進器的出現,破冰船不僅能船首破冰航行,船尾也能破冰航行。破冰船可以首向正常航行;當遇到堅硬的冰脊和冰壩時,艉部朝前,利用船尾特殊的螺旋槳將冰脊下方的冰塊"掏空",實現破冰前行。
4 極地船舶與冰的作用
極地船舶遭遇的冰載荷取決于船-冰相互作用方式、船體幾何形狀、浮冰的特性和參數。IACS 極地冰級規范中,通過計算船舶與冰碰撞來計算冰載荷,碰撞過程中考慮了船速、浮冰厚度、冰的幾何形狀等參數[5]。極地船舶也可能碰到規范定義之外冰載荷,因此各個船級社給出的定義有所區別[3]。
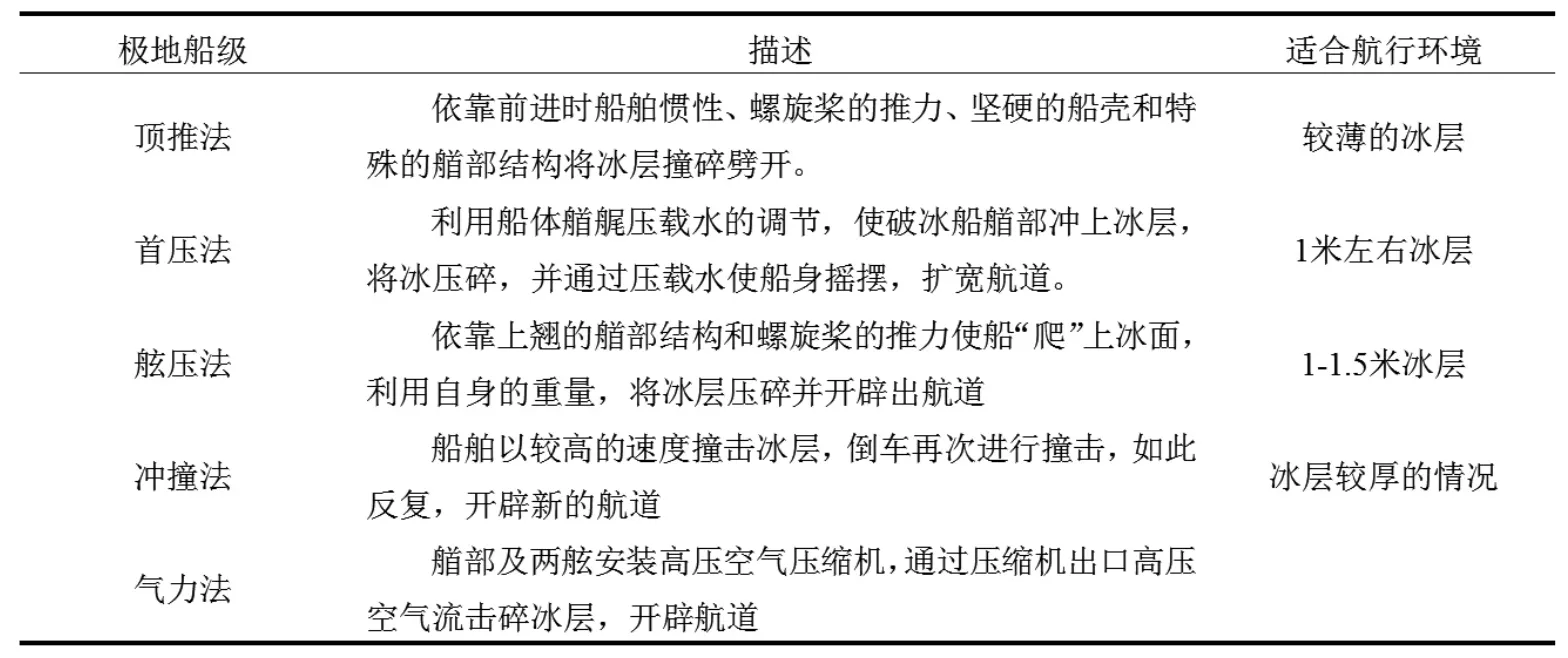
表 1 IACS 極地規范

表2 極地船舶破冰方法
研究船舶與冰相互作用并不是針對全船,而是通過研究船體區域的影響。極地船舶上有7 個區域可能會與冰發生作用[4]。分別為艏柱、艏部、肩部、舯部、舭部、底部和尾部,見圖1。
4.1 船體與層冰的作用
極地船舶破冰前進時。依靠螺旋槳推進力和特殊的艏部構造使船舶艏部駛上層冰,船頭駛上冰層之后會對冰層產生向下的壓力壓斷層冰。船體舷側及其他曲率較小結構和層冰互相擠壓,在接觸區域引起局部載荷,阻止船舶的運動。因此,需要重點研究冰區航行船舶舷側結構設計及強度分析。
4.2 船體與浮冰的作用
船舶航行區域的海冰不連續,各個離散,船體不同區域將與浮冰接觸。當浮冰在海流作用下發生較大運動時,船體與海冰作用將產生較大作用力。當沒有及時調整航向,舷側、船肩及艉部等區域與浮冰發生碰撞作用。船結構將受到很大局部載荷。
忽略浮冰與船體作用后碎裂,浮冰與船體作用可以簡化為剛體的運動方程:
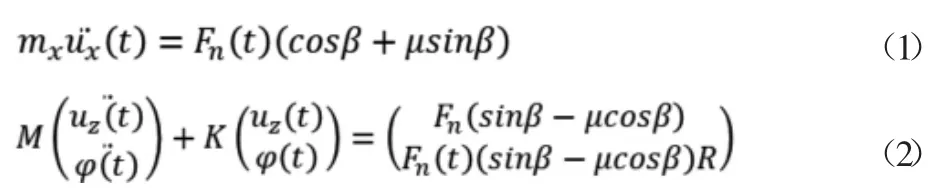
式中:M-浮體質量陣;K-浮體剛度陣;ux-浮冰重心水平運動速度;uz-浮冰重心垂直運動速度;β-浮冰傾斜角;R-冰緣的壓入深度。
4.3 船體與冰脊的作用
海冰受到風浪流的聯合作用,同時隨著溫度、結構的變化,在層冰表面會形成冰脊。由于形成機理的區別,其受力更為復雜。從結構上冰脊可分為由結構較為松散的上部帆高與下部的龍骨結構以及中間被壓實固結層。冰脊產生的冰載荷由固結層導致的結構載荷和帆高所產生摩擦阻力。
4.4 冰對船體的擠壓作用
由于風浪流的存在,冰以一定的速度在海面運動。如果冰層較為堅硬且與船有一定的相對速度,將會發生擠壓作用。擠壓力垂直作用在舷側,作用高度很小并分布于船長方向較長的區域。對船將產生很大的威脅。
4.5 冰對船體的碰撞作用

圖1 船舶與冰相互作用區域

圖2 船艏破冰過程示意圖

圖3 船艏與浮冰作用
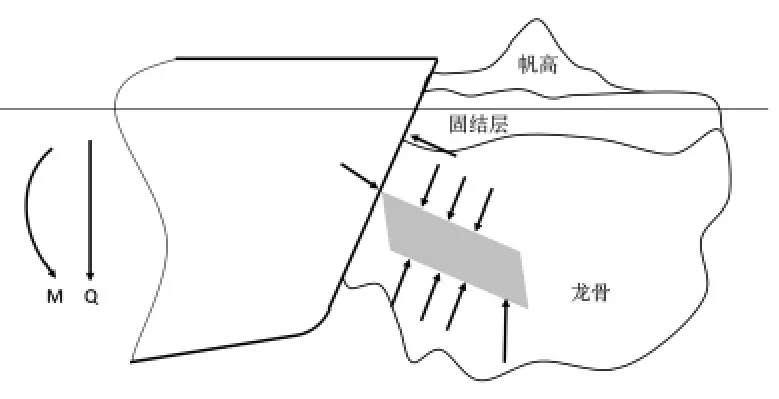
圖4 船艏與冰脊作用
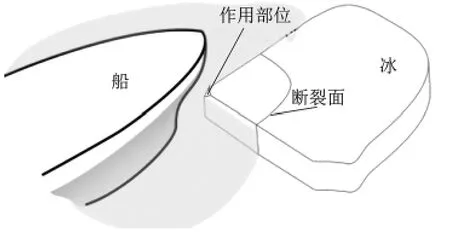
圖5 船舶與冰相互作用示意圖
極地航行區域環境復雜,極地船舶會遭受浮冰、碎等的撞擊。因此開展流動冰載荷下船冰碰撞動態響應研究十分必要。1982 年,芬蘭研究人員提出了細長結構與冰相互作用的數值仿真模型。后來在此基礎上開發了寬體結構非線性動態響應的計算程序(PSSII)。加拿大研究人員在1994 年對船與多年冰及冰山碰撞時的動態響應進行了研究,提出了考慮流固耦合的非線性船冰碰撞計算模型。
5 冰載荷理論計算方法
5.1 能量平衡原理
船體與海冰相互作用過程中,會產生產生能量傳遞,局部海冰將發生能量損耗[6]。船體與冰接觸后產生的能量損失由海冰的變形所吸收,通過研究兩者作用后海冰變形來計算船體所收到的冰載荷,就叫能量法。能量法假設:
(1)冰-船作用中海冰結構沒有破壞,但發生了變形。
(2)忽略船在海水中的能量損失。
(3)冰-船作用前海冰相對靜止。
(4)冰-船作用位置處于冰層的一個直端點處。
(5)冰層對船體的摩擦暫不考慮。
能量法通過碰撞來建立相應的冰載荷模型[7],得到冰載荷產生的壓力和作用范圍。計算中考慮了船速和浮冰特性(如浮冰強度、形狀和厚度等)[8-10]。通過建立能量法基本方程,求船體的海冰作用力。
5.2 冰力函數求解
求解能量方程需要知道船體和冰作用后的變形情況。加拿大紐芬蘭紀念大學Daley 教授在1999 年對Popov 的模型進行了拓展,建立的冰載荷模型適用于其他典型的船舶與冰相互作用工況,提出了修正能量方法,得到的計算結果更符合實際情況。當船舶通過壓碎與冰相互作用時,最大作用力公式如下[8]。

式中:fa與形狀有關,Vship、Mship是船的速度和排水量,PO是冰的厚度。
5.3 海冰動力學本構模型
目前為止,學者們提出了很多海冰動力學本構模型,如粘塑性模型、彈塑性模型、各向異性模型和粘彈塑性模型等。利用能量方程或加權殘量方程,用有限元法求解船舶或結構與海冰的作用力和力矩。Lau 等人分別采用二維和三維海冰相關問題的離散元法對一系列海冰-結構和海冰-船的碰撞問題進行了模擬。
根據極地船舶與冰的相對速度可以將冰載荷分為靜態響應與動態響應。冰載荷為隨機載荷,當不考慮冰載荷隨時間變化的特性時,海冰為靜載荷,此時船的響應為靜態響應。當考慮冰載荷的歷時過程時,船的響應為動態響應。極地船舶的動態響應包括受到動態冰載荷時的強度與振動問題,現有的設計規范無法準確預報極地船舶對動態冰載荷的響應。
6 結論
最近幾年,關于極地船舶結構強度分析問題的理論研究、數值模擬和實驗技術在不斷完善。國際船級社聯合會等制定了相關極地船舶的規范,為極地船舶的設計建造提供參考。但是,極地船舶與海冰的作用方式與強度計算方法還是沒有完美的解決,國內極地船舶的研究剛剛起步,缺乏建造經驗,極地船舶還沒有形成規范體系,需要在今后研究和建造中不斷積累和發展。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
海洋通報(2021年3期)2021-08-14 02:20:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子技術與軟件工程(2016年24期)2017-02-23 19:13:41
光學精密工程(2016年6期)2016-11-07 09:07:19
河北遙感(2014年4期)2014-07-10 13:54:59
