不確定環境下無人機區域目標搜索及載荷參數影響
2020-08-14 01:50:52吳岸平侯中喜魯亞飛
國防科技大學學報 2020年4期
關鍵詞:區域
吳岸平,郭 正,侯中喜,魯亞飛
(1. 國防科技大學 空天科學學院, 湖南 長沙 410073; 2. 中國空氣動力研究與發展中心 超高速空氣動力研究所, 四川 綿陽 621000)
無人機(Unmanned Aerial Vehicles, UAV)以其成本低、零人員傷亡、隱蔽性好等特點,在現代戰爭中被廣泛使用。偵察和搜索是目前無人機系統最主要的作戰任務,采用無人機對作戰區域進行目標搜索和情報偵察已經成為戰場信息獲取的重要手段[1-3]。
通常無人機在執行搜索任務之前,對任務區域的信息知之甚少,除給定的任務區域地理位置和區域大小外,對搜索目標的位置分布和數量信息并不確定,這就決定了無人機在搜索過程中必須根據實時的探測結果進行在線路徑決策。在無人機平臺確定的條件下,區域搜索能力的提升,一方面取決于搜索路徑決策,另一方面取決于機載光電載荷參數配置決策。無人機在搜索路徑上的探測收益越高,越有利于搜索效率的提升;機載光電載荷視場范圍越大,探測范圍越大,但相應的分辨率會降低,而視場范圍減小能提高分辨率,但相應減小探測范圍。
國內外學者針對這兩方面問題開展了大量研究。在搜索路徑決策方面,文獻[4-6]研究了基于模型預測控制理論的多無人機協同區域搜索算法。文獻[7]提出了一種基于協同進化算法的多無人機協同區域搜索算法,比遺傳算法具有更高的搜索效能。文獻[8]提出了一種使用未來路徑規劃和過去路徑分享的方法,提高了有通信距離限制下多無人機協同搜索移動目標時的效能。文獻[9]提出了一種基于改進概率圖的多無人機協同搜索策略,采用基于Agent的仿真模型分析了通信條件和目標特性對協同策略的影響。文獻[10]提出了一種帶信息素回訪機制的多無人機協同目標搜索方法,使用蒙特卡洛方法驗證了無人機數量、光電載荷探測靶面半徑、光電載荷性能對搜索效率的影響。文獻[11]設計了一種基于一致性的信息融合策略和基于多旅行商問題求解的搜索路徑規劃方法,提高了多機協同搜索的效率。文獻[12]采用改進快速擴展隨機樹(Rapid-exploring Random Tree, RRT)的UAV實時搜索航跡規劃算法,提高了航跡規劃效率。在機載光電載荷參數配置決策方面,文獻[13]構建了光電載荷對海面目標收容能力分析模型,給出了光電載荷的理論“搜參”范圍,并根據海面分辨力計算模型得到針對不同海面目標的實用“搜參”范圍。文獻[14]提出了紅外搜索與跟蹤(Infrared Search and Track, IRST)系統探測性能評定的方法,研究了目標發現概率與系統作用距離以及載機速度之間的關系。
國內外研究對不確定環境下的無人機協同搜索方法進行了積極探索,但針對機載光電載荷探測結果的不確定性對搜索效能的影響研究較少,如何選擇機載光電載荷視場范圍以提升搜索效能是亟待解決的實際問題。針對該問題,本文建立了基于概率網格地圖的無人機區域搜索模型,以發現目標和降低任務區域不確定度為搜索性能指標,采用粒子群算法對搜索路徑進行滾動優化以完成路徑決策;通過機載光電載荷視場范圍與探測概率關系模型,結合概率地圖更新機理,分析得到區域搜索最佳探測概率及對應的視場范圍,并使用蒙特卡洛方法進行了對比仿真驗證。
1 不確定環境下區域搜索建模
使用無人機對某一特定任務區域進行偵察搜索,任務想定如圖1所示,由于目標的位置分布和數量信息具有不確定性,光電載荷的探測結果也存在著隨機性,因此必須實時獲取和更新目標信息。采用合理的搜索決策方法和光電載荷參數配置,是保證無人機在盡可能短的時間內降低任務區域的不確定度,并發現盡可能多的目標的關鍵。
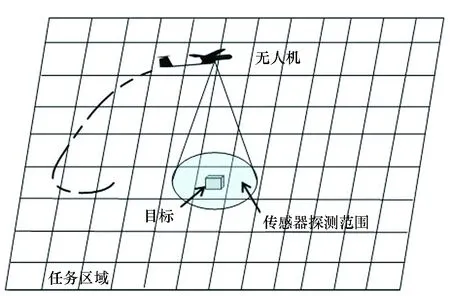
圖1 無人機區域搜索任務示意圖Fig.1 UAV area target search scenario
搜索問題建模是進行任務決策的基礎,概率圖模型是圖論和概率論按特定方式相結合的成果,是用來處理不確定性數據和知識的主流方法[15]。本文采用二維離散的網格概率地圖來描述無人機對當前目標和環境信息的認知,并通過實時更新來反映搜索的動態過程。
1.1 概率地圖建模與更新
將任務區域劃分為Lx×Ly的離散網格,并將網格按順序進行編號,ci,j表示任務區域中第i行第j列的網格。網格c中有沒有目標的客觀事實用ωc表示,1代表目標位于網格中,0代表目標不在網格中。無人機對網格c的探測結果用ξc表示,1代表在網格中發現目標,0代表在網格中未發現目標。
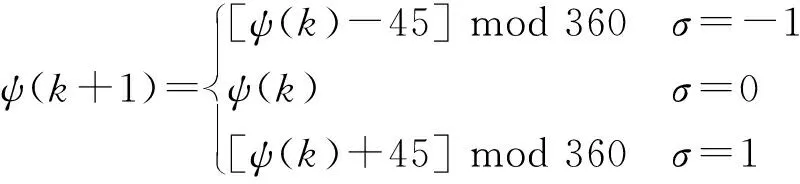
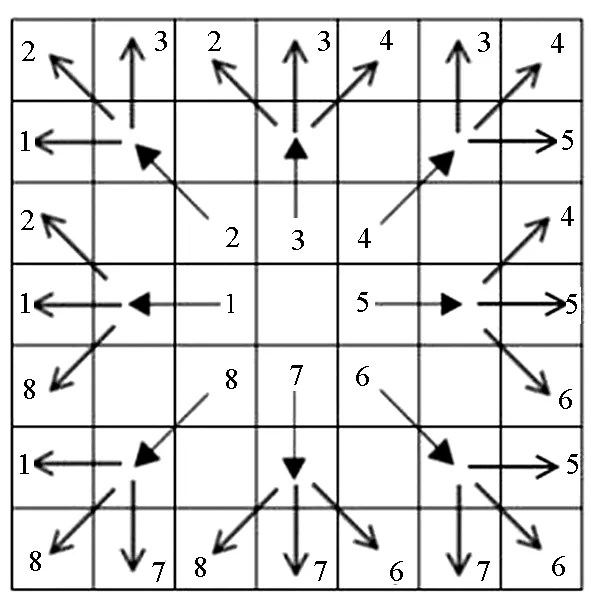
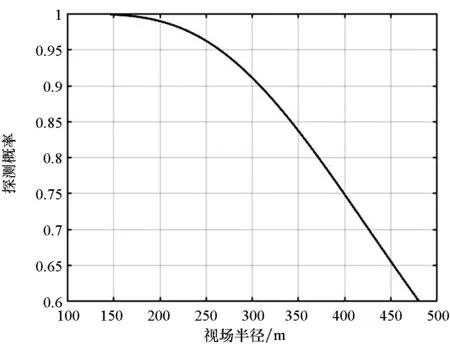
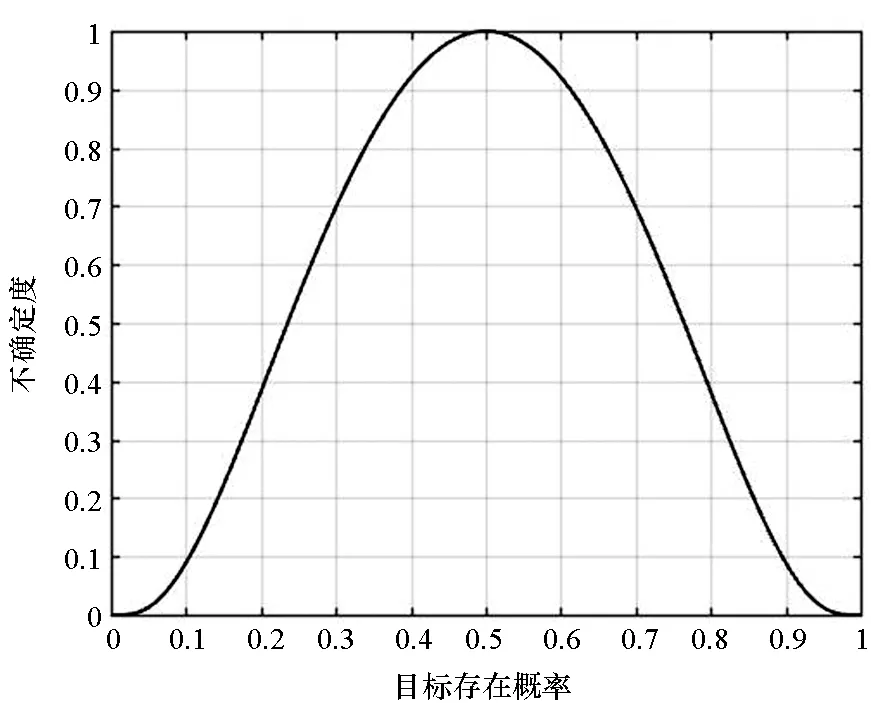
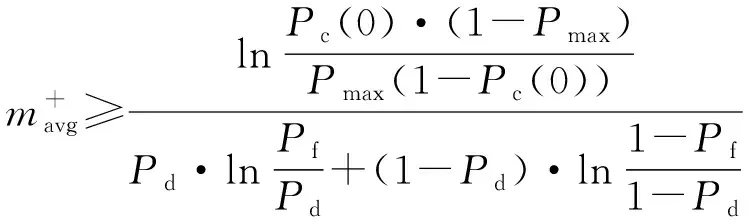
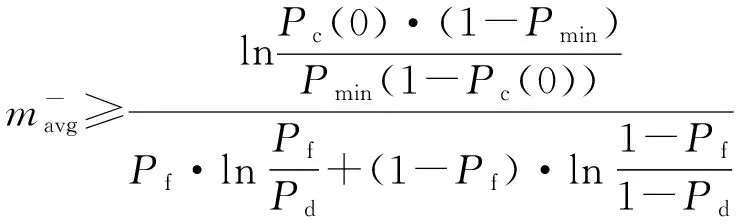
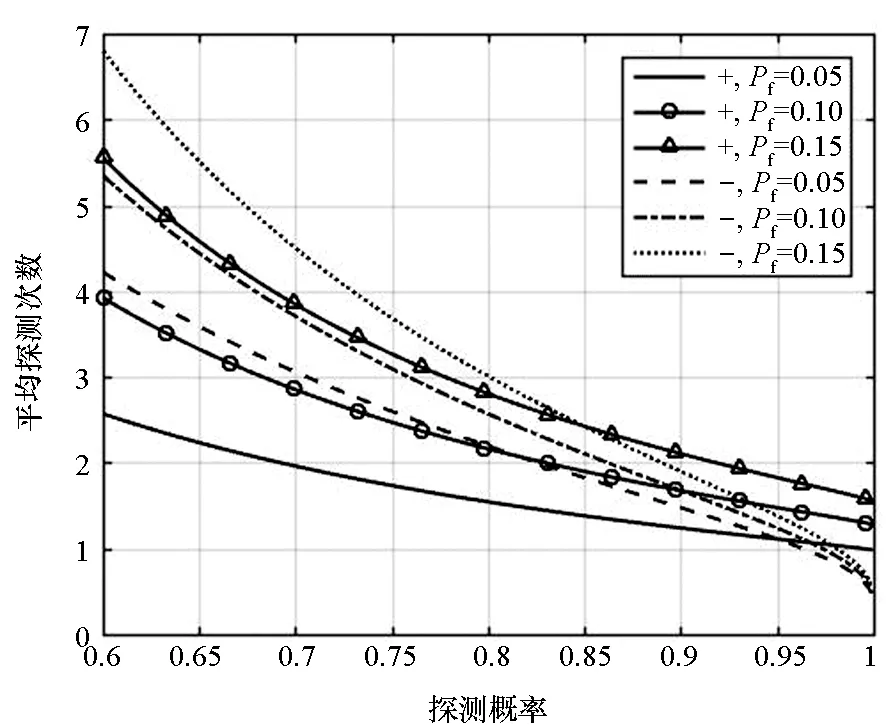
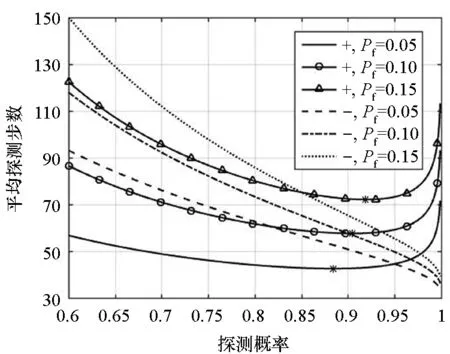
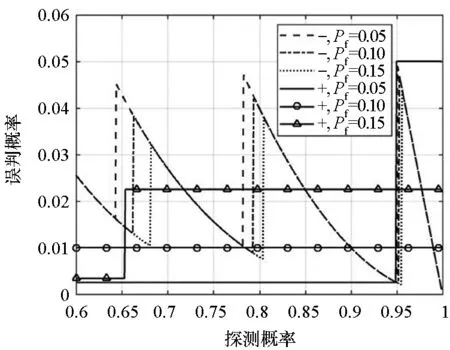
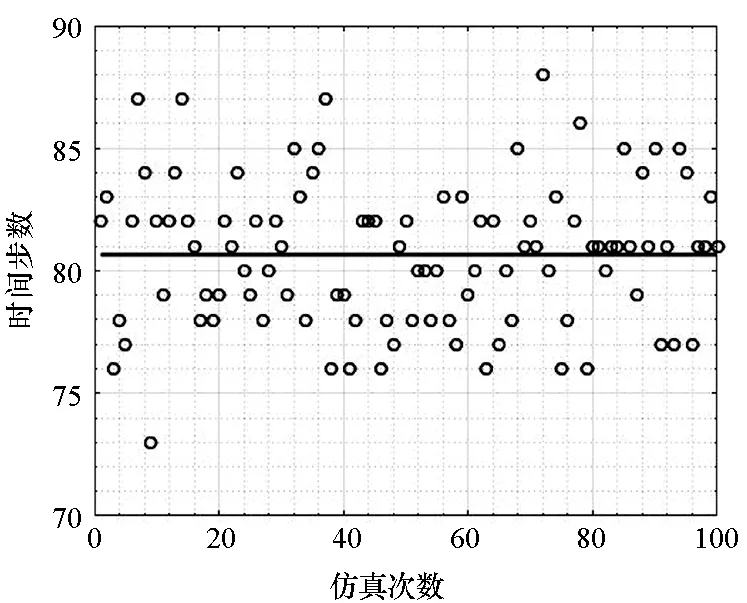
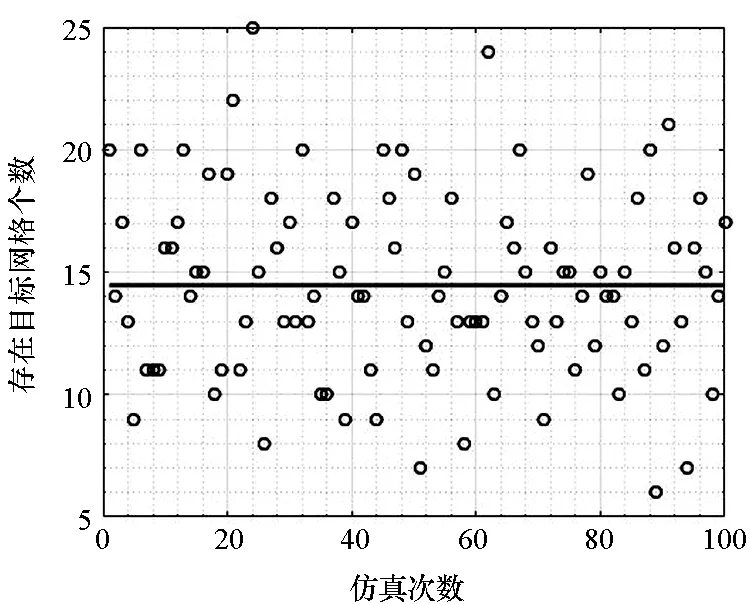
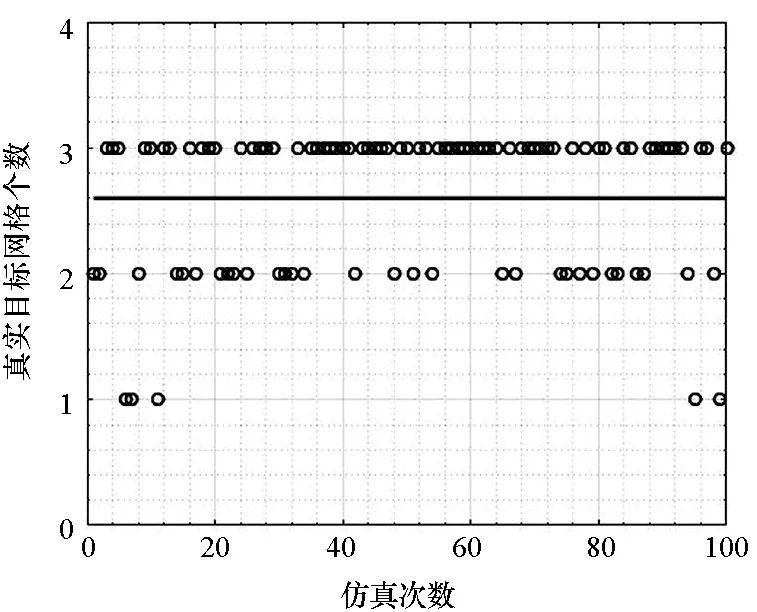
無人機載光電載荷的探測概率用Pd表示,即Pd=P(ξ=1|ω=1);虛警概率用Pf表示,即Pf=P(ξ=1|ω=0),且一般情況下探測概率與虛警概率滿足0 Pc(k)= (1) 無人機在執行偵察任務時,通常只考慮等高飛行的航跡問題,把無人機視作二維空間運動的質點,用網格編號和航向角的變化來反映無人機的運動過程,k時刻無人機的狀態為(i(k),j(k),ψ(k)),受無人機平臺的飛行性能約束,在k+1時刻無人機的航向只能在k時刻航向的基礎上左轉45°、直行或右轉45°,則無人機航向角滿足: (2) 無人機k+1時刻的位置變化可以根據航向角進行求解,8個航向角所對應的無人機位置變化如圖2所示,其中“→”為k時刻的航向,“→”為k+1時刻的航向。 圖2 無人機航向對應的位置變化圖Fig.2 Illustration of possible orientation and location 光電載荷探測模型描述了無人機對搜索目標的探測與發現關系,一般采用探測概率Pd、虛警概率Pf、探測范圍ds和探測距離Rs等來綜合表達。這里考慮豎直向下固定安裝的光電載荷,由光學成像原理可知,目標在機載光電載荷成像面上的成像大小δ為: (3) 式中,f為光電載荷焦距,dc為目標的特征尺寸。由此,可計算出目標在光電載荷成像靶面上覆蓋目標臨界尺寸的線對數N為: (4) 式中,b為光電載荷的靶面成像尺寸,βs為光電載荷垂直視場角,Ns為光電載荷的行掃描線數。 對于特定目標的識別,目前已建立了所需目標分辨率的經驗規則,最常用的是Johnson準則,它給出了特定目標在圖像中被發現、定向、識別和確認所需的經驗數據,根據數據表可以反向推導出目標傳遞概率函數的計算公式[16]。 (5) 取機載光電載荷行掃描線數Ns=1080,發現目標的最小維方向分辨率N50=1.0,則機載光電載荷針對特征尺寸為1 m的目標,視場范圍與探測概率之間的關系如圖3所示。 圖3 視場范圍與探測概率關系圖Fig.3 Relationship between field range and detection probability 為提高無人機的搜索效率,性能指標函數的建立和優化算法的選擇非常關鍵。引入不確定度概念,建立包含不確定度指標以及對探測結果為發現目標的網格重訪和網格探測次數控制的搜索性能指標函數,選擇優化效率較高的粒子群算法進行搜索航跡規劃,以提高搜索效率。 無人機在進行搜索探測時,網格內大概率存在目標和大概率不存在目標都是所期望的結果,而兩者概率相近時則需要繼續探測加以甄別。為描述這種探測需求,引入不確定度概念。 (6) 目標存在概率Pc(k)與不確定度Wc(k)的對應關系如圖4所示。當網格c內目標存在概率為0.5時,存在目標和不存在目標的可能性相等,不確定度最大;當網格c內目標存在概率為0或1時,目標是否存在的確定性最強,不確定度為0。 圖4 目標存在概率與不確定度對應關系Fig.4 Relationship between field range and detection probability 無人機進行搜索決策時主要考慮兩方面內容:一是盡可能探測不確定度較高的區域;二是當上一次探測結果為發現目標時盡可能進行重訪確認。因此,搜索性能指標函數定義為: (7) 針對無人機不確定環境下的區域搜索問題,搜索路徑的實時決策是解決問題的關鍵,這就要求搜索算法在保證效率的同時提高航路生成速率。粒子群算法是一種模擬鳥群捕食行為的生物進化算法,常用于解決復雜的非線性問題,具有簡單易實現、優化效果較好等優點,本文采用粒子群算法對搜索路徑進行優化。 根據1.2節所述的無人機運動模型,對每一步飛行決策進行編碼,構造解空間(0,1,-1,0,…),其中-1代表左轉,0代表直行,1代表右轉。粒子群進行位置和速度的更新后,新產生的解向量各分量可能不再是{-1,0,1},而是其他實數,需經式(8)所示關系對解進行規范化,將其轉化為合理解向量。 (8) 采用2.1節中所述的搜索性能指標函數對解向量進行評價,經迭代更新后得到最優搜索路徑,并根據探測結果對概率地圖進行更新,滾動優化直至任務區域不確定度達到指標要求。 合理的機載光電載荷參數配置能大大提高區域搜索效率,通過對單個網格內是否存在目標所需的平均探測次數估計、任務區域平均探測步數估計和誤判概率估計的分析,優化出最合理的光電載荷參數配置,以提升搜索效率。 (9) 無人機單次探測結果是獨立同分布的,根據大數定律,隨著探測次數mξ→+∞,若網格內存在目標,則探測結果為發現目標的次數為mξ·Pd,未發現目標的次數為mξ·(1-Pd)。由概率更新公式可得: (10) 當網格內目標存在概率大于Pmax時,可認為該網格內存在目標,所需的平均探測次數估計公式為: (11) 同理可得網格內不存在目標時,達到判斷標準所需的平均探測次數估計公式為: (12) 無人機對任務區域沒有先驗信息的條件下,Pc(0)=0.5,取Pmax=0.95,Pmin=0.05,得到機載光電載荷探測概率與單個網格平均探測次數之間的關系如圖5所示。隨著探測概率增加和虛警概率降低,所需的平均探測次數逐漸減少,且確認網格內存在目標所需的平均探測次數的減少速率小于不存在目標的平均探測次數。 圖5 探測概率與單個網格平均探測次數關系圖Fig.5 Relationship between detection probability and detection times of single grid (13) 取15 km×15 km任務區域為例,根據光電載荷視場范圍與探測概率之間的對應關系,可得探測概率與任務區域平均探測步數的關系如圖6所示。 圖6 探測概率與任務區域平均探測步數關系圖Fig.6 Relationship between detection probability and detection steps of search area 可以看出,隨著探測概率的增大,確認任務區域內目標存在所需的平均探測步數先減少后增加,存在一個最優的探測概率,且最優探測概率隨著虛警概率的減小而減小;確認任務區域內目標不存在所需的平均探測步數隨探測概率的增大而減小;降低光電載荷虛警概率有利于減少平均探測步數。 圖7 探測概率與誤判概率關系圖Fig.7 Relationship between detection probability and misjudgement probability 由圖7可知,隨著探測概率的增大,探測誤判概率呈周期性遞減,中間產生階躍的原因是探測概率增大導致形成誤判所需的探測次數減少,虛警概率的減小會增大探測誤判概率的極值;判斷網格內是否存在目標所需的探測次數相同時,虛警誤判概率隨虛警概率的增大而增大,探測概率過大時,所需探測步數減少,虛警誤判概率反而會增加。 取15 km×15 km任務區域,在其中設置3個目標,采用蒙特卡洛方法分別驗證采用最佳光電載荷參數配置時的目標搜索能力和探測概率、虛警概率對搜索效率的影響。 取機載光電載荷虛警概率Pf=0.1,綜合3.2節和3.3節分析結果,最優的探測概率Pd=0.90,此時對應的機載光電載荷視場范圍半徑為308 m,按照441 m×441 m規格將整個任務區域劃分為34×34個正方形網格,在此條件下無人機運動一個網格步長轉彎45°對應的轉彎半徑為1100 m左右,滿足小型無人機飛行的最小轉彎半徑要求。采用基于粒子群算法的搜索方法對搜索路徑進行優化,為便于后續對比,取每個時間步長內無人機運行34個網格,當任務區域平均不確定度小于0.1時結束搜索。 采用蒙特卡洛法的思想隨機生成目標所在的網格位置,進行100次仿真,將任務區域平均不確定度降低到0.1所需的時間步數如圖8所示,平均時間步數為81;探測結果為存在目標的網格個數如圖9所示,平均有14.6個網格探測結果為存在目標,扣除真實存在目標的網格,誤判率為1%;發現真實存在目標的網格個數如圖10所示,平均能發現2.6個真實目標,繼續降低結束搜索的不確定度約束,能進一步提升發現真實目標的個數。 圖8 最優探測概率對應的時間步數Fig.8 Detection steps under optimal detection probability 圖9 最優探測概率對應的存在目標網格個數Fig.9 Number of grids with detected target inside under optimal detection probability 圖10 最優探測概率對應的真實目標網格個數Fig.10 Number of grids with real target inside under optimal detection probability 作為對比,在相同虛警概率Pf=0.1條件下,分別取探測概率Pd=0.788、Pd=0.900和Pd=0.985進行100次蒙特卡洛仿真,Pd=0.900對應的任務區域網格個數和每個網格大小與4.1節描述相同;Pd=0.788對應的任務區域網格個數為28×28,每個網格大小為536 m×536 m;Pd=0.985對應的任務區域網格個數為50×50,每個網格大小為300 m×300 m。 圖11 不同探測概率搜索性能對比Fig.11 Effect of different detection probability on search efficiency 仿真結果如圖11所示。可以看出,Pd=0.900所對應的平均時間步數最少,即相同無人機平臺條件下機載光電載荷視場范圍半徑為308 m時搜索效率最高,平均時間步數隨探測概率增大而先減小后增大的趨勢符合3.2節任務區域平均探測次數估計;平均存在目標網格個數隨探測概率的增大而增加,但同時任務區域的網格總數也在增加,虛警誤判概率在1%附近波動,且隨探測概率的增大而減小。 為驗證虛警概率對搜索效率的影響,在相同探測概率Pd=0.900的條件下,分別取虛警概率Pf=0.05、Pf=0.10和Pf=0.15進行100次蒙特卡洛仿真,任務區域網格個數為34×34,每個網格大小為441 m×441 m。 仿真結果如圖12所示。可以看出,平均時間步數和平均存在目標網格個數都隨虛警概率的增大而增加,即在Pd=0.900條件下,搜索效率隨虛警概率的增加而降低,虛警誤判概率隨虛警概率的增加而增大,與3.2節和3.3節中的估計相符。 圖12 不同虛警概率搜索性能對比Fig.12 Effect of different false alarm probability on search efficiency 本文采用基于概率地圖的無人機區域搜索模型和基于粒子群算法的搜索路徑滾動優化方法,解決了無人機不確定環境下實時探測更新的區域搜索問題;通過對任務區域平均探測時間步數和誤判概率的估計分析和仿真驗證,得到了機載光電載荷參數優化配置策略,形成了如下結論: 1)無人機搜索效率隨虛警概率的減小而增加,但隨探測概率的增大而先降低后增加,存在最優探測概率及其對應的光電載荷視場范圍; 2)無人機搜索誤判概率在一定范圍內隨虛警概率的減小而減小,但隨著探測概率的增大會因所需的探測次數減少而產生向上躍升; 3)無人機機載光電載荷參數的合理配置能有效提高搜索效率和降低搜索誤判概率,經蒙特卡洛方法仿真驗證,所述策略能有效優化參數配置。
1.2 無人機運動模型
1.3 光電載荷探測模型
2 不確定環境下區域搜索方法
2.1 無人機搜索性能指標函數

2.2 基于粒子群算法的滾動搜索方法
3 光電載荷參數影響分析
3.1 單個網格平均探測次數估計

3.2 任務區域平均探測步數估計

3.3 誤判概率估計

4 仿真結果分析
4.1 目標搜索性能
4.2 探測概率影響

4.3 虛警概率影響

5 結論
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15