橋門式起重機作業人員實操考試自動評分系統實現方法的研究
2020-08-28 09:04:30林健民
中國設備工程 2020年16期
關鍵詞:系統
林健民
(福建省勞安設備技術開發中心,福建 福州 350003)
隨著全國各地起重機械設備數量的激增,特種設備考核機構與作業人員的人機比例矛盾越發突出。目前,特種設備作業人員實行網上報名,利用計算機準確迅速地對作業人員的專業知識進行無紙化考試并自動批改試卷,但是,實操考試卻缺少有效的自動化解決方案。本文針對橋門式起重機無人化考評提出三種實現方式進行研究與討論。
1 橋門式起重機實際操作考試模式介紹
1.1 考試用具介紹
如圖1所示,圖中圓柱體為考試中所需要使用的載物,該圓柱體是一個直徑50cm高60cm,重量約為50kg的金屬鐵桶。初始位置擺放在A圓的最內圓處,掛進吊鉤。
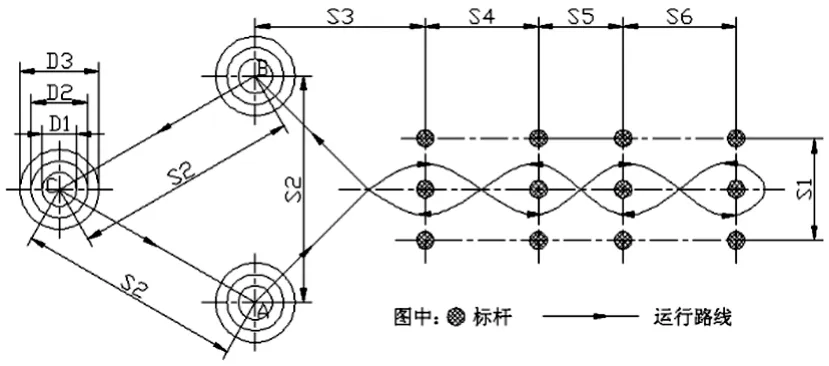
圖1
A、B、C為畫在地面作為定點停放的標識,每個標識的圓圈直徑從內到外別為60cm、70cm、80cm的。
12個標桿規格完全相同的,主要考察學員的穩鉤能力與吊運載物過程中的精確性與穩定性,每個標桿高170cm,直徑2.5cm,標桿底部為20cm×20cm×1cm的正方形底座,底座不固定,排列成3×4的方陣式。
考試場地中各考核點放置距離如表1所示。

表1(單位cm)
1.2 考試過程介紹
考試由現場考評員發號開始考試指令,學員將水桶A調離地面100~150cm,進入標桿方陣,按照箭頭所示方向繞樁行駛,出標桿方陣后,學員需要將鐵桶抬升至200cm以上高度,運行到B圓準確放下,再以相同方式吊運至C圓、A圓,整個考試過程結束,考評員通過記錄學員吊運過程中放置精確度,碰桿、倒桿情況,以及司機室內現場操作能力進行記錄、打分。
1.3 考試評分標準
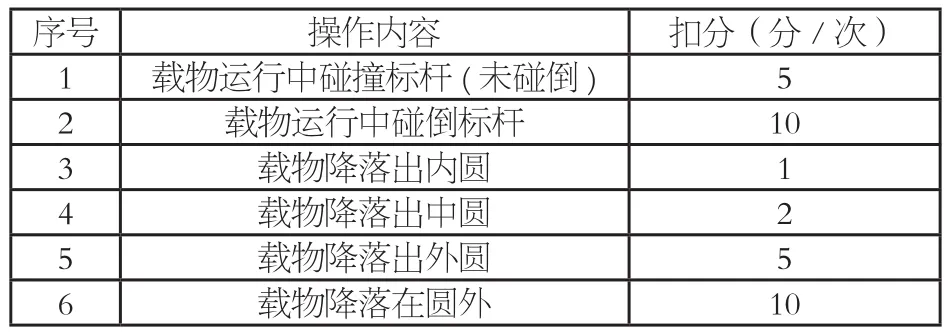
表2
2 無人化考評方法實現模式探究
2.1 激光雷達
激光雷達具有激光雷達具有高精度、高分辨率的優勢,同時,結構簡單,測距速度快、系統穩定可靠。本系統中地面平坦,所有障礙物又都垂直于地面, 采用兩個2D激光測距雷達分別在指定的分別監測定點停放以及吊物的繞桿情況,利用激光測距雷達掃面的平面形成坐標系,確定定點停放位置與標桿坐標,兩個雷達測量出吊物此時的坐標位置,使其和地標原點進行對比。
得出的值就可以判斷吊物禁止于地面狀態時所處的位置。同時,在吊物底部安裝超聲傳感器,判斷吊物的起升高度高度,以判斷吊物是否按要求完成指定操作,是否達到指定起升高度以及是否運行在激光雷達的監測范圍,同時,通過激光雷達數據判此分數。
2.2 視覺分析技術
利用雙目視覺識別原理,在場地布置中預先將定點停放點、標桿、吊物預設為對比度反差較大的顏色,同時,利用工業攝像機拍攝考試現場,采用位置法和圖像法。此類方法是基于位置控制方案是一種高精度的伺服控制方法,其將視覺信息進行數字化,將整個考場物體設置在三維坐標中定義相關的誤差數據,在進行數據識別時,根據吊物在運行、停放、過桿的過程中,構造的幾何數學模型推斷出定點、標桿、吊物等目標點與雙目攝像頭之間的位置,從而將整個過程中的目標運動均通過相對坐標來定制或傳達到上位機,通過上位機采樣分析計算得出考試結果。
2.3 傳感器技術
系統采用壓力傳感器、傾角傳感器、光柵傳感器作為現場采集用設備,在定點停放位置分別放置3組圓形的壓力電纜,用于檢測定點停放的精確度。在標桿中分別安裝傾角傳感器用于判斷是否碰桿或碰倒桿。在行進路線與場地邊界布置光柵傳感器,判斷吊物在繞桿過程中是否通過正確的路線以及整個考試過程中是否超出邊界。將各個節點通過Zigbee無線通信傳輸模式構成無線傳感器網絡,將各傳感器信號傳輸至上位機模塊,監測考試情況以及考試結果。
3 利弊分析
3.1 激光雷達
由于3D激光測距雷達存在價格昂貴、體積大而笨重,尤其是成像速度慢的弱點在很大程度上制約了它的進一步應用,故本次研究主要采用2D激光測距雷達,但是,2D激光雷達只能對指定二維平面進行掃描,無法完成普通陣面掃描雷達的三維深度視覺功能,此問題導致吊物必須精準地運行在檢測面中,對檢測平面布置的精確性有較高的要求,同時,要求根據超聲傳感器的測距情況對激光雷達接收的多組數據進行篩選取出正確的考試數據判斷得分。本系統硬件價格較為昂貴,場地布置與程序編寫難度適中,對場地要求低,布置得當,精確度最高。
3.2 視覺識別技術
視頻拍攝出的畫面能更加直觀地表現出吊物與地標圓形的距離,視頻拍攝技術所體現的距離遠不如激光雷達來的精確,分析圖像所需要的程序編寫較為困難,需要對圖像進行深入的分析,對上位機的硬件配置有較高的要求。上位機配置不足的情況下會導致系統卡頓、分析速度慢等情況。同時,對于現場的場地與物體顏色區分有要求,需要對場地內所有物件進行顏色定制,以便呈現最佳視覺效果,避免物體干涉,同時,在鏡頭布置的過程中,需要防止現拍攝角度被場地內其他物體遮擋的可能性。本系統硬件價格低廉,軟件開發投入最高,由于涉及硬件少,系統更新迭代較為簡易。現場布置簡易,精確度相對較低。
3.3 傳感器技術
近半個多世紀以來,傳感器技術突飛猛進,傳感器技術的應用已經十分普及,同時,技術成熟,本系統各類傳感器原件原理結構以及造價也相對低廉。在本系統應用中,需要對所有的物件進行改造,加設傳感器以及信號發送設備。對考試過程還原基于傳感器的信號接收實現,無法真實還原考試現場,同時,由于系統中涉及的元器件較多,并且在運行過程中存在按壓、碰撞等情況,其中任何一個元器件出現損壞,就將導致系統無法正常運行,需要專人對系統內的元器件進行定期的檢測、維護、保養。現場布置較為復雜,需要對所有定點停放點、標桿等器件進行改造以及布線等工作。本系統硬件價格適中,軟件簡易,現場布置相對復雜,對后期維護保養的要求較高,由于涉及的元器件較多,系統不易更新。
4 結語
本文針對橋門式起重機實際操作考試和流程入手,根據考試規則要求,提出三種不同無人化考評實現方式,以及初步的設計方案與利弊分析,相關的測試以及論證工作正在進一步展開。上述研究對橋門式起重機考試無人化實操考試系統在考試中有重要意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
