地面靜電加速度計的位移檢測電路設計
2020-09-09 00:34:58賀曉霞鄭崢嶸韓豐田劉云峰
導航與控制 2020年3期
賀曉霞,鄭崢嶸,韓豐田,劉云峰,張 嶸
(清華大學精密儀器系導航技術工程中心,北京100084)
0 引言
靜電懸浮加速度計(Electrostatically Suspended Accelerometer,ESA)是一種利用靜電力實現檢驗質量多自由度支承、利用力平衡原理實現加速度測量的高精度慣性儀表,可作為海空重力測量儀器的核心傳感器。它的基本工作原理為:敏感質量被靜電懸浮于其閉環零位處,當受到外界加速度作用時,敏感質量產生位移,通過位移檢測系統測出敏感質量位移引起的微電容變化,并通過反饋電壓產生的靜電力平衡敏感質量上的慣性力,使敏感質量穩定在零位位置,反饋電壓的幅值和極性即反映了輸入加速度的變化。其顯著特點為量程小、靈敏度高、噪聲低,在地球重力場測量[1]、 物理學基礎理論驗證[2]、 衛星拖曳[3]等空間領域有著廣泛的應用。法國的ONERA從20世紀70年代起陸續研制了CACTUS、ASTRE和GRADIO等系列加速度計,用于大氣阻力實驗、無阻力飛行試驗和空間準穩態非重力的測量等[4];美國研制的MESA加速度計進行了敏感探頭從圓筒型到立方體的改進,應用到重力衛星及多種航天器上[5];歐洲航天局在空間引力波探測計劃中針對小于1Hz超低帶寬的應用場景,采用兩只靜電加速度計進行驗證[6];中國空間研究院蘭州物理研究所針對微重力測量,研制了靜電懸浮加速度計樣機,并通過高壓懸浮進行地面實驗驗證[7];華中科技大學物理系對懸絲懸掛法、高電壓懸浮法、自由落體法三種地面測試方法進行了比較[8]。這些靜電加速度計都是針對微重力環境進行設計,目前尚未有針對地面應用的靜電懸浮加速度計的研究報道。相比于空間應用,地面應用的靜電懸浮加速度計需要更高帶寬、更大量程,即需要高的懸浮電壓,這會引入較大的電路噪聲,從而限制了儀表的測量精度。
在位移檢測方面,常用的方法包括二極管檢測[9]、 調頻式檢 測[10]、 電橋 差分檢 測[11]、 變壓 器檢測[12]等。二極管檢測法信噪比高,解調方便且功耗低,但無法屏蔽引線的對地寄生電容;調頻式檢測法抗電磁干擾能力強,易于數字化,但不適合有高壓反饋的檢測場合;電橋差分放大檢測法結構簡單,能夠屏蔽引線的對地寄生電容,但在抑制共模誤差方面不如變壓器檢測法;變壓器檢測法具有抗干擾能力強、靈敏度高的特點,是空間靜電加速度計最成熟的解決方案。基于高帶寬、大量程的需求,對變壓器檢測電路進行改良,是解決靜電加速度計地面應用的關鍵。
本文面向靜電懸浮加速度計的地面應用需求,采用一種中心固定有一薄法蘭盤的空心薄壁圓筒敏感質量、圓筒內外側與法蘭盤兩側布置檢測和加力電極的方案。該結構具有較大的表面積質量比,能夠減小起支電壓、預載與控制電壓,從而減小由高壓加力電路引入的噪聲,預期能在不超過350V的支承電壓下滿足預期過載。本文以此種大表面積質量比的敏感探頭結構為測量對象,設計了基于差動電容的位移檢測系統,建立了電容檢測電路的數學模型,對系統各部分電路參數進行了設計、仿真并對電路誤差來源進行了分析,對電路的噪聲、線性度、靈敏度及對高壓隔離的效果進行了實驗。
1 大表面積質量比的敏感探頭結構
敏感探頭結構及電極分布如圖1所示,包括敏感質量、上/下電極幄、圓筒內/外電極,其平面電極板、圓柱內外電極板的定義如圖2所示。
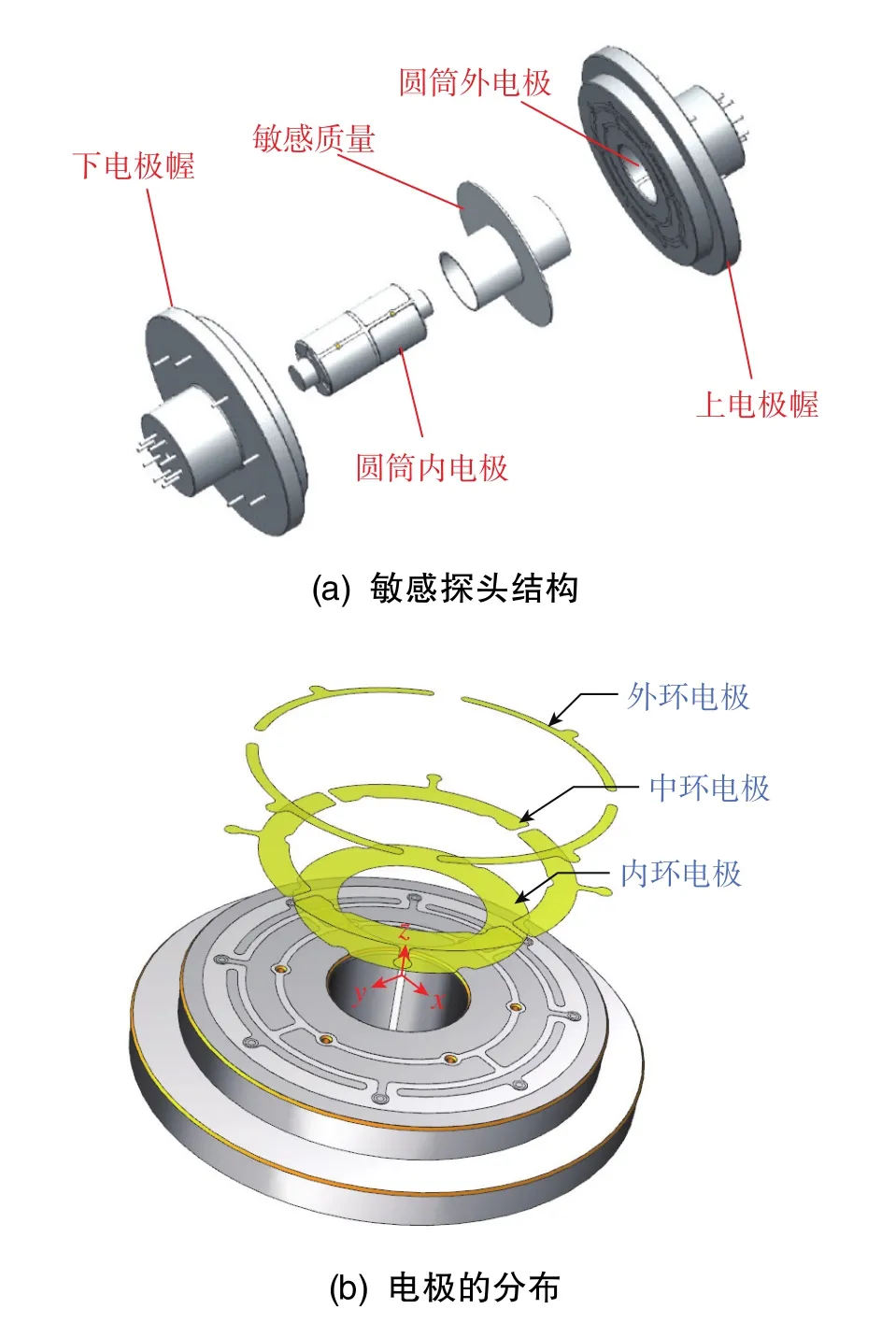
圖1 敏感質量結構及其電極分布Fig.1 Structure of proof mass and its electrode distribution

圖2 電極板的定義Fig.2 Definition of electrode plate on the plane and cylinder
五個自由度的位移檢測及高壓加力電極分配如表1所示。其中,圓筒內外電極負責控制敏感探頭在X、Y、θ、φ自由度的位移并同時復用為檢測信號的注入電極,盤面的中、內環電極負責控制Z軸;在5個自由度的位移和姿態檢測方面,外環電極用變面積式位移檢測法對X軸、Y軸的位移進行檢測,中環電極用變間隙式檢測法對θ、φ軸作位移檢測,內環電極用變間隙式檢測法對Z軸作位移檢測。各組電極板面積及電容設計值如表2所示。
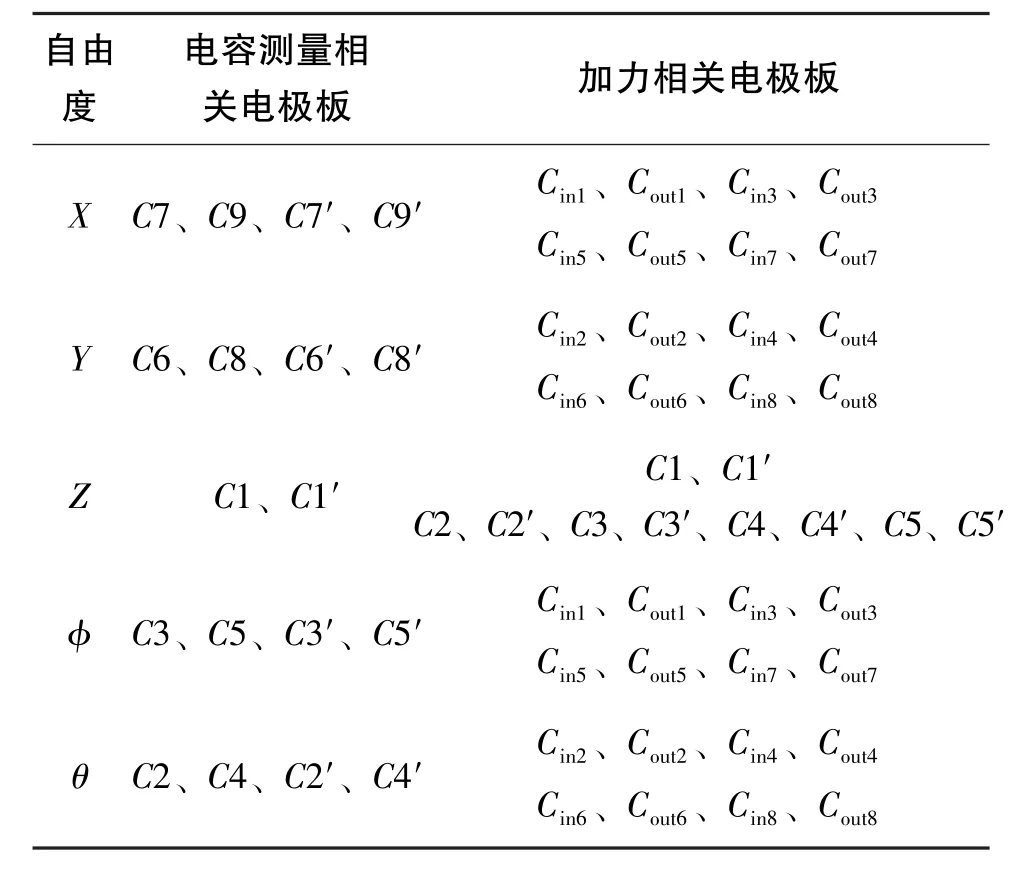
表1 各自由度的電極分配Table 1 Distribution of electrodes for five degrees of freedom
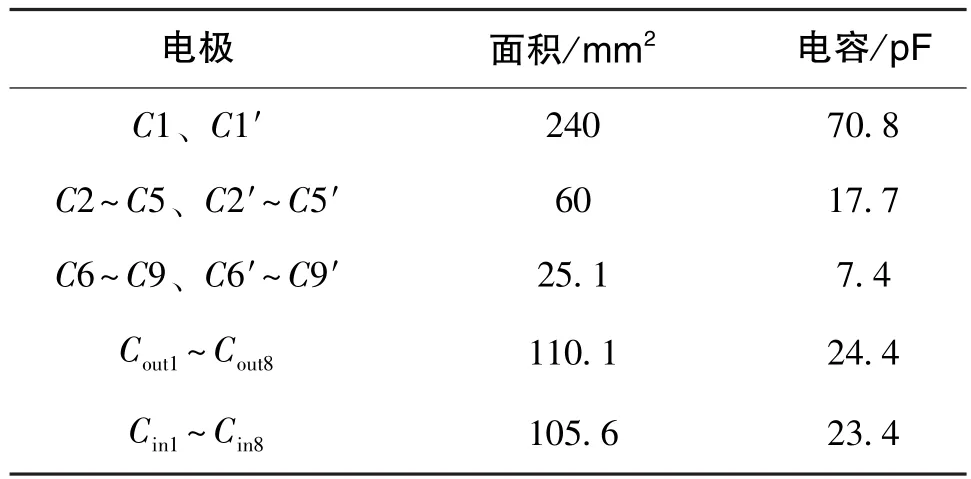
表2 電極面積及電容設計值Table 2 Values of electrode area and electrode capacitance
圖3(a)為敏感結構的相關組件,包括敏感探頭、中心環、定距環、內電極圓柱、電極幄。其中,敏感探頭由鈹材料加工而成,盤面直徑34mm、壁厚 0.5mm,圓柱直徑 14mm、長度22.5mm、壁厚0.4mm,質量1.417g,盤面與電極板間隙30μm,柱面與電極板間隙40μm。圖3(b)為裝配完成的整體結構,離子泵用于維持腔內真空,有利于降低因板間殘余氣體導致的噪聲和阻尼干擾。
基于此敏感結構的設計,以C1-C1′電極的位移測量為例,下文給出了位移檢測電路的設計原理、數學模型、仿真及實驗結果。

圖3 敏感結構的裝配Fig.3 Assembly of proof mass and electrodes
2 位移檢測電路的設計
位移檢測電路的組成如圖4所示,包含了變壓器式的電容檢測電路、差分放大電路、帶通濾波、相敏解調電路及高頻載波信號源。
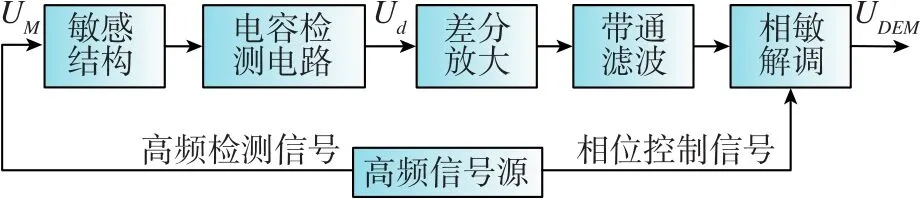
圖4 位移檢測電路示意圖Fig.4 Diagram of displacement detection circuit
設電極C1、C1′與敏感質量的間隙電容分別為C1、C2,差動電容ΔC=C1-C2。當外界輸入加速度時,敏感結構發生偏移,ΔC發生變化,并對UM進行調幅,調制后的UM經由變壓器式電容檢測電路、差分放大電路、帶通濾波后再通過相敏解調電路,得到與ΔC呈近似線性關系的位移檢測信號UDEM,輸出給后續模/數轉換電路。 其中,UM為電路中的載波信號,ΔC的變化可認為是調幅信號。
2.1 電容檢測電路的數學模型
變壓器式電容檢測原理如圖5所示。L1、L2、L3為變壓器的電感,Cp為調諧電容,用于調整電路的諧振頻率。通常有Cp?C1, 以穩定電路增益,屏蔽寄生電容的影響。

圖5 變壓器式電容檢測電路原理圖Fig.5 Schematic diagram of transformer-based capacitance detection circuit
不同于空間應用,地面加速度計的帶寬更寬、量程更大,因此需對圖5所示電路進行優化。為有效隔離高頻載波信號與高壓反饋信號,減小高壓影響,需設計高壓隔離網絡;由于ΔC引起的信號變化幅度很小,變壓器副邊應設計高增益、低噪聲的信號放大結構。優化后的電容檢測電路如圖6所示。
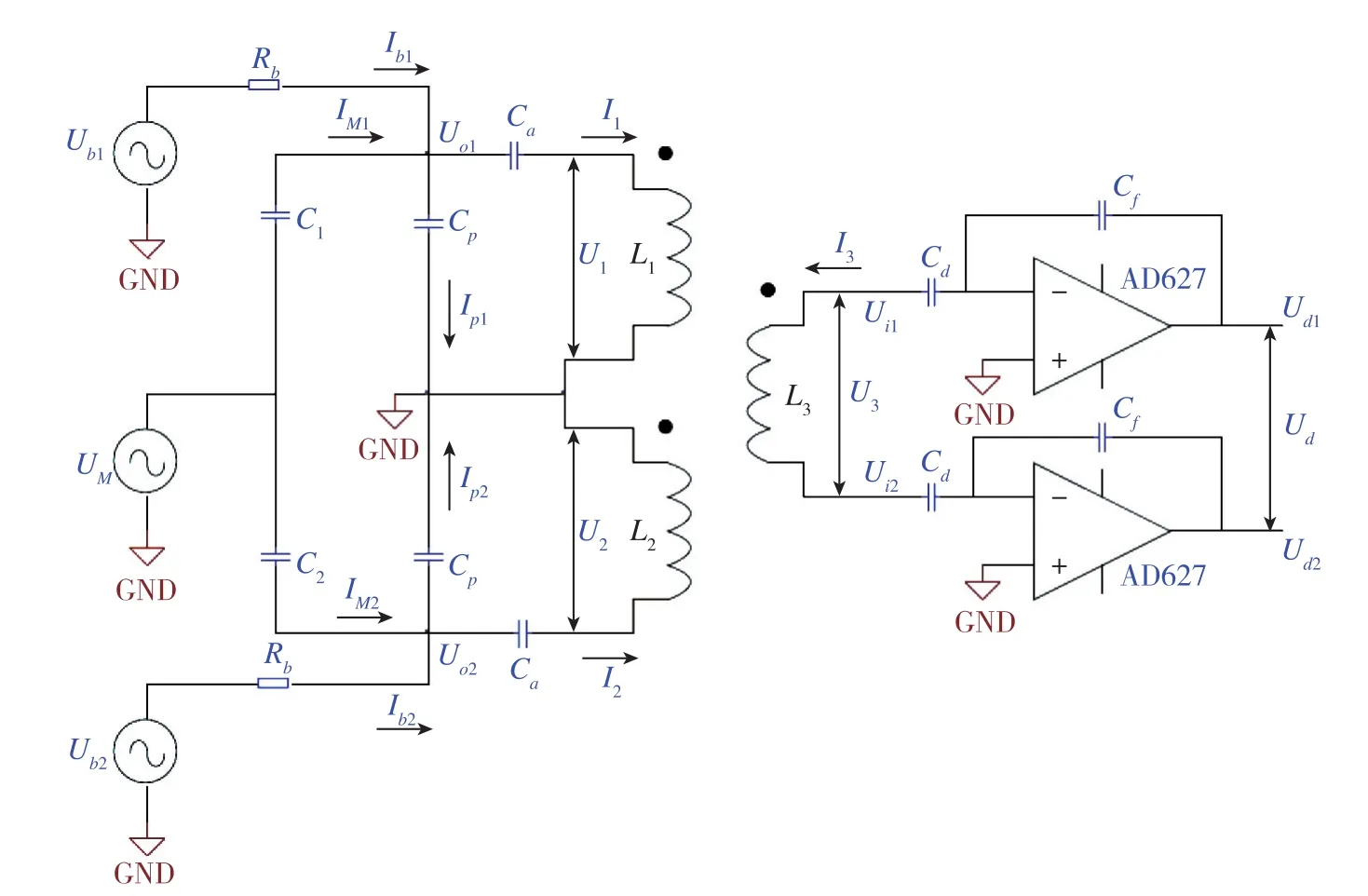
圖6 實際電容檢測電路原理圖Fig.6 Schematic diagram of actual transformer-based capacitance detection circuit
Ub1、Ub2為交流高壓控制信號,Cf為運算放大器的反饋電容;解耦電容Cd能夠將電流信號轉化為電壓信號,用于后續放大;Ca為隔離電容,用于衰減懸浮高壓引起的干擾。高壓隔離電路利用電容在不同頻率下阻抗的差異實現信號隔離,如高壓控制信號頻率取1kHz~10kHz、載波信號頻率取500kHz~1MHz時,能夠將二者有效隔離,避免高壓控制信號影響后續檢測電路。下面對電路的傳遞函數和增益進行分析。
假設電流源、電壓源、電感、運算放大器均是理想的,考慮UM引起的變壓器副邊輸出。將信號源±Ub做短路處理,根據疊加定理,對于副邊電路,有
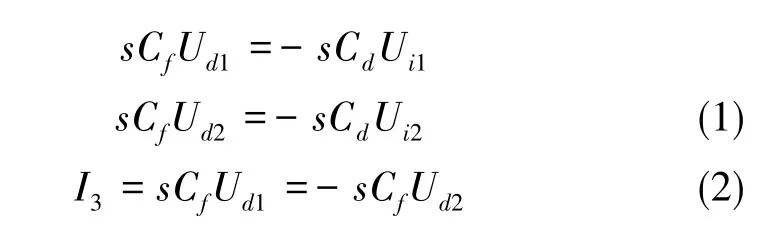
從而,U3、I3與Ud的關系式可表示為

根據Kirchhoff定律,變壓器原邊的電流為

式(5)中,

Uo1、Uo2可以表示為
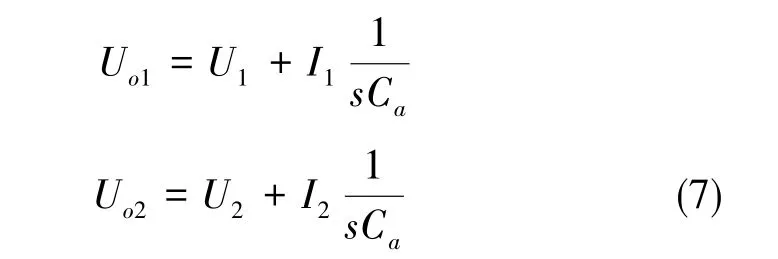
將式(7)代入式(5)中, 得到

式(8)中,

因為Cp遠大于C1和C2,從而Zp≈Zp1≈Zp2,α1≈α2。 根據變壓器性質,有

式(10)中,n1、n2為變壓器原邊匝數,n3為變壓器副邊匝數,M13、M23為變壓器的互感系數,其表達式為

式(11)中,L1、L2、L3為變壓器的電感值,K13、K23為耦合系數。理想狀態下,K13=K23=1,取n1=n2=n3,L1=L2=L3=L,則

將式(4)、 式(8)、 式(13)代入式(12)中, 得到U3與UM的關系式
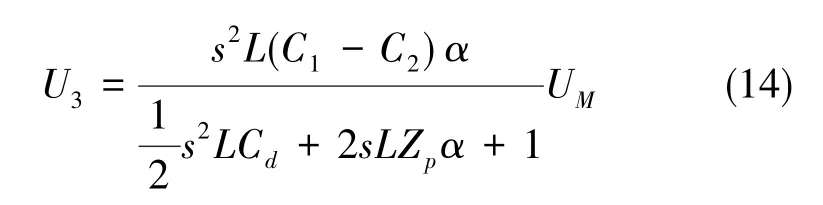

設載波信號UM的頻率為500kHz,Vd為Ud的幅值,VM為UM的幅值。經過帶通濾波、調制解調,輸出信號Vd與ΔC、VM的關系式可表示為

式(16)中,

Kcu=即為電容檢測增益,代表輸出電壓與電容的靈敏度。由式(16)可知,在理想狀態下,輸出信號Vd與差動電容ΔC成線性相關。
要保證實際電路趨于理想狀況,應注意電路布線應盡量對稱以避免寄生電容、變壓器三端電感值相等以及Cp遠大于C1和C2,以保證Kcu的穩定。
2.2 高壓反饋信號的設計
在地面測試中,靜電加速度計的反饋電壓通常為直流形式[13-14],有利于降低控制電壓幅值。但直流放大電路存在零位漂移、噪聲大的現象,限制了加速度計的測量精度。而交流控制可實現不同自由度間的分頻控制,減小軸間耦合,易于獲得低噪聲和高零偏穩定性[15]。因此,懸浮控制信號采用交流調幅形式。
為避免高壓信號對變壓器的損壞,高壓信號需要通過隔離電路施加。對隔離電路的要求是盡量小的壓降和足夠的噪聲隔離水平,以期減小其對位移檢測電路的影響。
首先,計算施加在電極上的電壓值Uo1、Uo2來評估壓降。地面應用中,控制信號的頻率一般小于10kHz, 由于Ca在皮法(pF)量級,L在毫亨(mH)量級, 有,因此L的分壓可忽略不計。僅考慮由高壓控制電壓產生的Uo1、Uo2, 根據圖6的電路,有

由式(18)可知,要使壓降小,即Uo1≈Ub,應有sRbCp?1且Cp應選擇為具有耐高壓特性的電容。
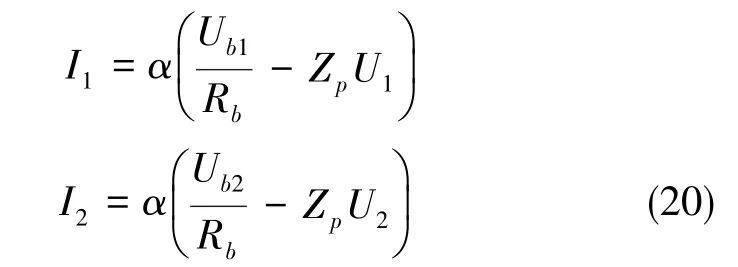
下面推導Ub對Ud的影響,以評估高壓對位移檢測電路的影響。根據 Kirchhoff定律,在Uo1、Uo2處,有

將式(7)、 式(9)代入式(19)中, 得到
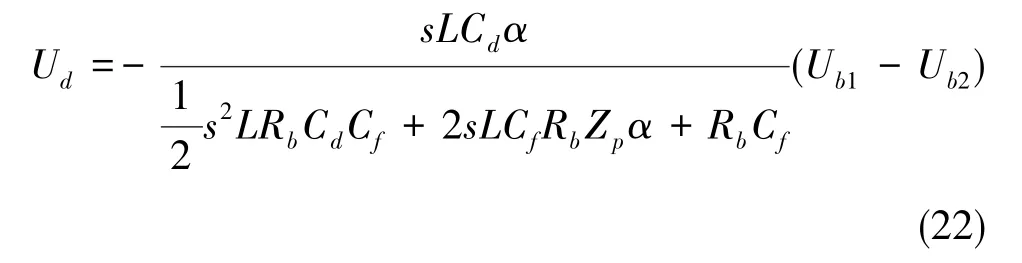
將式(4)、 式(13)、 式(20)代入式(12)中, 得到

將式(3)代入式(21)中, 最終得到Ud與Ub1、Ub2的關系式
對于電容檢測電路的輸出Vd,設10kHz控制信號引入的誤差為Vd-error,則Vd-error與Ub1、Ub2的關系式為

式(23)中,

Kb(s)稱之為高壓信號的誤差增益。綜合式 (16)和式 (23),電容檢測電路的輸出信號表示為

要減小反饋控制信號對輸出的影響,一是后續電路要有足夠的濾波能力,二是通過增大電阻Rb來減小,從而降低控制信號引起的誤差。但應注意的是,若Rb太大,根據式(18)壓降會增大;Rb太小, 則會降低電容檢測增益。 因此,Rb取值應根據實際情況折中設置。
3 仿真與實驗驗證
3.1 電路幅頻、相頻響應特性的仿真
位移測量電路在零位附近可近似成線性系統,但在離零位較遠處,敏感質量的位移與差動電容變化呈現非線性。另外,電路設計不對稱、寄生電容等會影響電容檢測增益,從而增加其測量非線性。要提高儀器的測量精度,就要提高系統線性度,保證模擬電路的增益穩定。以Z軸的差動電容檢測為例,檢測電路的相關參數取值如表3所示。
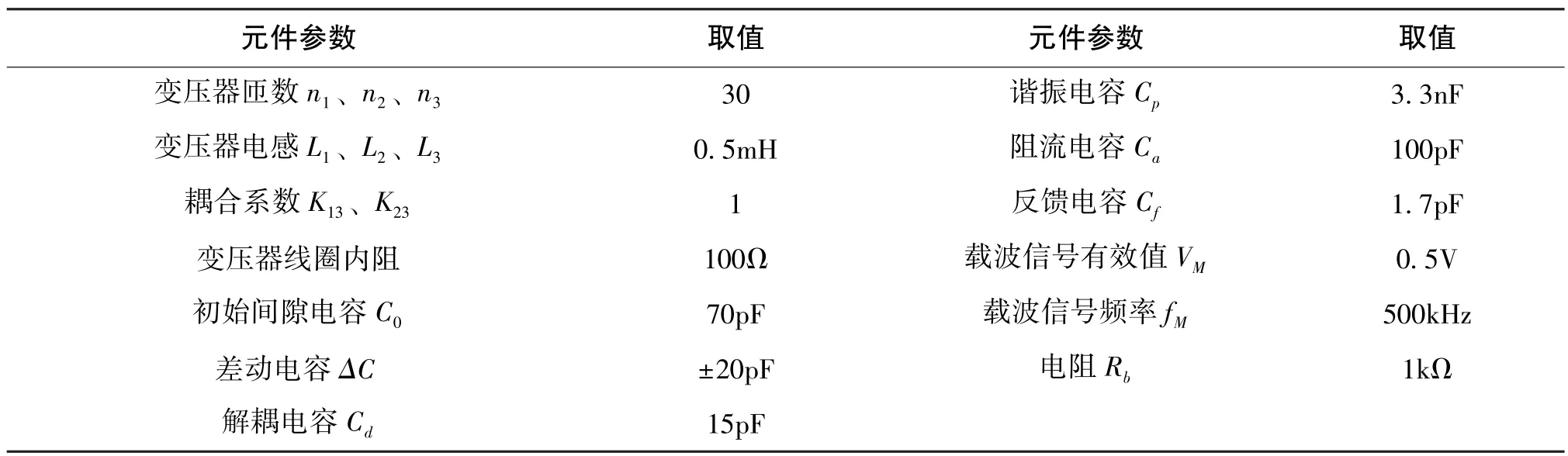
表3 電路相關參數取值Table 3 Values of circuit related parameters
其中,載波信號的頻率設為500kHz。若選取的載波頻率過低,則隔離網絡無法充分衰減低頻控制信號并提取高頻載波信號;若選取的載波頻率過高,則會增大變壓器的寄生電容和鐵芯磁損,不利于電路的長期穩定。綜上考慮,選取載波頻率為500kHz。
對于電路諧振頻率和載波頻率的選擇有兩種做法:1)選擇載波頻率遠離諧振點,使相位變化平緩,但信號靈敏度和信噪比較差;2)選擇載波頻率在諧振點附近,這樣能獲得較理想的靈敏度和信噪比,但相移劇烈。為獲得較理想的靈敏度和信噪比,選擇載波頻率在電路諧振點附近,并通過設置變壓器Q值保證相位變化引起的增益變化在可控范圍內。根據此原則,設計了表3所示的參數,計算得到電容檢測電路的幅頻響應特性,在ΔC=20pF時,電容檢測電路的幅頻和相頻響應特性如圖7所示。其中,電路諧振頻率約為495.8kHz。
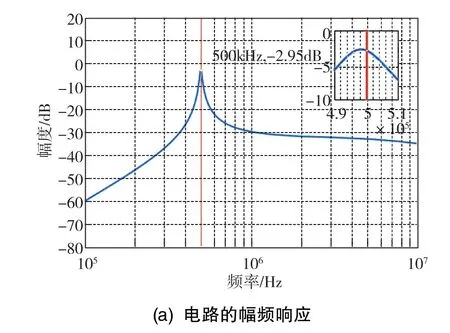

圖7 電容檢測電路的頻率響應Fig.7 Frequency response of capacitance detection circuit
相移最終會影響位移檢測電路的增益變化,增益變化對力平衡式加速度計的影響主要體現在動態標度因數和控制系統的穩定性上。原理上,增益變化不影響力平衡式加速度計的零位和靜態標度因數。本文設計的加速度計重點關注零位和靜態標度因數性能,故相移不超過控制系統的動態性能和穩定性要求所規定的范圍即可,即位移測量電路增益在10kHz帶寬內變化不應超過20%。表4列出了500kHz±5kHz范圍內ΔC改變時電路的相位響應。
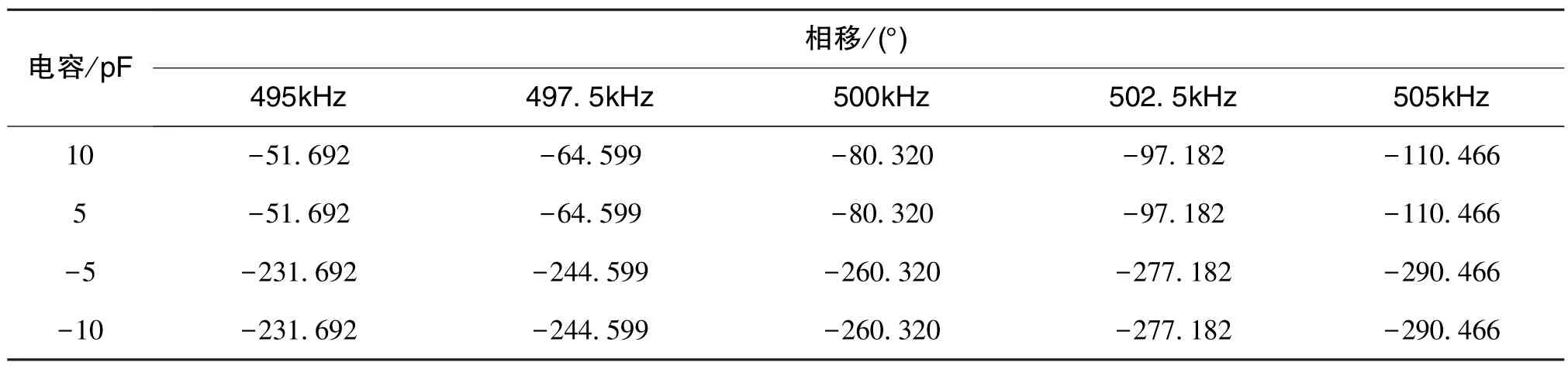
表4 電容檢測電路相移隨差動電容、頻率的變化關系Table 4 Relationship between phase shift of capacitance detection circuit and differential capacitance and frequency

式(26)中,λa為差分放大、帶通濾波電路的增益。其中,二次諧波經后續低通濾去,不影響解調結果,故帶寬內相位變化引起的增益變化最大為1-cosΔφmax=0.132, 即增益波動約為13%,滿足加速度計控制系統穩定性要求。
另外,為抑制溫漂導致的幅頻、相頻變化,除了采用差分結構、設置變壓器Q值之外,還可采用溫度性能優異的電容(如C0G材料[16])、極低零漂運算放大器(如采用AD8629芯片斬波調零)、數字系統線性化控制(如DSP解算[17])及搭建溫控系統,這些措施都能夠提高增益、相位的穩定性。
3.2 電容檢測電路的誤差分析
電路的誤差主要來源于兩部分:一是電路設信號的表達式為[14]計原理上的非線性誤差,即Cp?C0,從而認為Kcu近似為常值——對于力平衡式加速度計,由于檢驗值始終穩定在零位附近,檢測電路的非線性、靈敏度變化等對加速度計的精度影響不大;二是高壓反饋信號引入的誤差,這需要充分抑制,但由于地面加速度計的懸浮回路帶寬較高,載波和懸浮電壓之間的頻率分離只有2~3個數量級,抑制效果受限。
首先分析原理誤差,由式(14)有

代入表3的參數,得到Vd與ΔC的關系,如圖8所示。
在ΔC∈(-80pF,80pF)的范圍內,輸出電壓Vd與差動電容ΔC可近似為線性關系。由于加速度計工作在零點位置,即ΔC→0。當ΔC∈(-0.5pF,0.5pF)時,電容檢測電路的非線性誤差為

圖8 輸出電壓Vd與差動電容ΔC的關系曲線Fig.8 Curves of output voltage Vdand differential capacitance ΔC

其非線性誤差小于1×10-6,能夠滿足系統的精度要求。
下面討論高壓引入的誤差,將表3的參數代入式(24)中,可得到高壓信號增益Kb

設Ub1、Ub2是頻率為10kHz、幅值為350V的正余弦信號,則為700V, 從而Vd-error最大為1.19V。而差分放大電路、帶通濾波電路在 10kHz處的幅頻響應分別為-123dB、-73dB,能夠將Vd-error降低至1.19×10-10V以下,即高壓信號引入的誤差為10-10量級,可忽略不計。
綜上,電容檢測電路的誤差能夠滿足加速度計的精度要求。
3.3 電路線性度測試
本文制作的位移檢測電路測試板如圖9所示,包括了電容檢測電路、差分放大電路、帶通濾波電路、相敏解調電路。

圖9 位移檢測電路測試模塊Fig.9 Test module of displacement detection circuit
根據式(16),解調電路輸出信號VDEM可以表示為

式(30)中,λ為除電容檢測電路外其他電路的總增益,理論值λ=3.49。電容檢測電路的增益Kcu理論值為0.0178V/pF。
電路線性度決定了加速度計控制的復雜度及加速度計最終輸出模型的復雜度,故需對其進行摸底測試。先使用RCL測量儀對可變電容器進行標定,再使用差分可變電容器作為電路的差分電容ΔC進行輸入。在室溫25℃下,測試結果如表5和圖10所示。
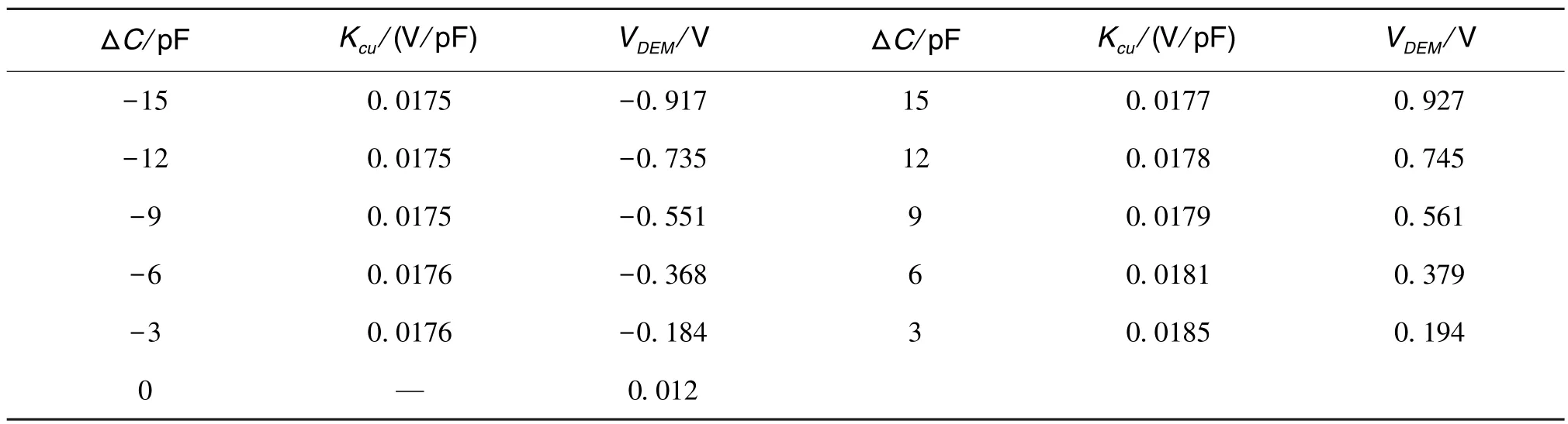
表5 差動電容、檢測電路增益、輸出電壓的關系Table 5 Relationship among differential capacitance,detection circuit gain and output voltage
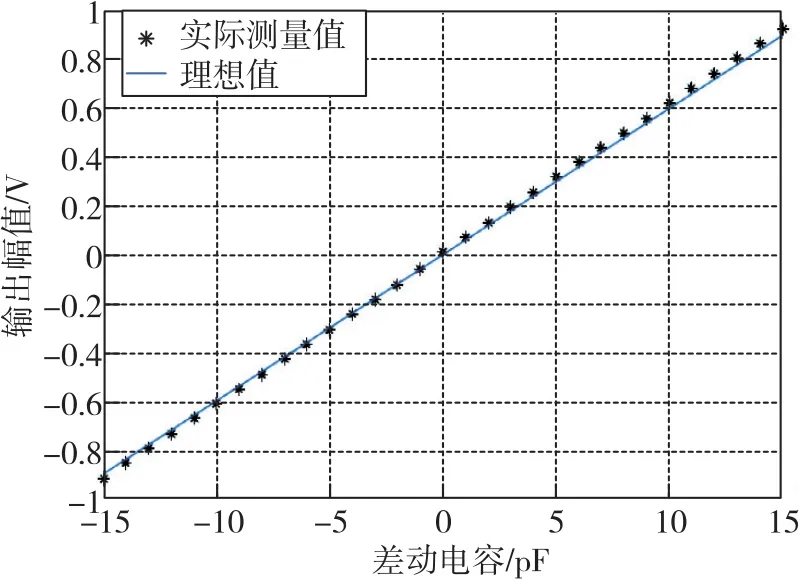
圖10 輸出電壓VDEM與差動電容ΔC的關系曲線Fig.10 Curves of output voltage VDEMand differential capacitance ΔC
由表5可知,在ΔC=0pF時,電路有零偏,這是由電容檢測電路的Cp不對稱、L1和L2不相等、導線引入的寄生電容等橋路不對稱因素造成的,可通過串聯調零電容或通過加速度計控制器中采用數字調零進行零位補償。扣去零偏值,通過計算,在±15pF變化范圍內,該測試電路的線性度為0.56%。
非線性的主要來源:1)用于標定可變電容的RCL測量儀精度所限(測量精度為0.1pF)以及可變電容的非線性造成的;2)位移測量系統的原理非線性。后期,擬設計專用標定裝置進行更精確的標定。最終在加速度計聯調測試中,可通過建模來補償掉此非線性誤差。
3.4 電路噪聲測試
測量帶寬內的電路噪聲決定了加速度計的分辨率,電路噪聲主要由電阻熱噪聲以及運算放大器的噪聲組成。由于靜電懸浮加速度計工作在零點附近,故可通過調節可變電容器使電路輸出為零,然后使用動態信號分析儀KeySight35670A測量電路輸出的噪聲幅度譜。
在帶寬20kHz范圍內,分別測量了高壓施加前和施加后的噪聲。高壓施加前的測量結果如圖11(a)所示,計算可得帶寬內噪聲的平均幅度譜為1.79×10-6V/Hz1/2。電容測量增益為0.0617V/pF,計算得電容分辨率為2.90×10-5pF/Hz1/2。由位移檢測電路引入的噪聲折算為加速度噪聲的計算公式為[15]

取加速度計敏感結構的設計參數如下:敏感質量m=1.417g,極板與法蘭盤標稱間隙d=30μm,UM的角頻率ωM=500kHz,變壓器的品質因數Q=15,代入式(31)中可計算得到, 滿足加速度計的設計要求。
在施加單路350V高壓控制信號條件下,位移測量電路的輸出噪聲幅度譜如圖11(b)所示。由圖11(b)可知,20kHz帶寬內噪聲平均幅度譜為1.82×10-6V/Hz1/2,和高壓施加前相比,由高壓電路引入的誤差為3×10-8V/Hz1/2,不是電路噪聲的主要來源。這與3.2節的分析相吻合,說明高壓隔離方案設計合理,高壓引入的誤差可忽略不計。

圖11 電路零位輸出的噪聲幅度譜Fig.11 Noise amplitude spectrum of circuit output at null position
3.5 增益的溫度穩定性測試
為測試增益的溫度敏感性,進行了25℃±1℃、ΔC=15pF條件下的增益穩定性測試,使用GraphTec GL 7000數據采集儀記錄了3h內電路總增益λ·Kcu的變化情況。根據采集的數據,每5min計算一次均值,其變化情況如圖12所示。

圖12 電路增益的穩定性測試Fig.12 Stability test of capacitance detection circuit gain
由圖12中的數據計算可得,電路的總增益初始測量值為0.061773V/pF,電路存在約1.079×10-5/h的漂移,這可能是由于電路溫漂、時漂導致諧振頻率漂移和放大電路的增益變化。后期,擬通過電路高低溫沖擊老煉、精密溫控或者模型補償進一步減小電路的漂移。
4 結論
本文針對靜電懸浮加速度計的地面應用需求,提出了一種基于大表面積質量比探頭結構的電容檢測方案,并設計了一套電容檢測電路。理論分析、仿真和初步測試結果表明,所設計的電容檢測系統具有噪聲低、線性度好、分辨率高的特點。此外,設計的隔離網絡能夠有效抑制高壓懸浮信號引入的干擾,提高電容檢測增益的穩定性和信噪比。在未來的工作中,將設計與之匹配的靜電懸浮控制系統,研究高精度和高穩定性的位移標定裝置,優化電路設計參數及懸浮控制算法,進行電路高低溫沖擊老煉,開展靜電懸浮加速度計的地面實驗研究與性能評估。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
通信電源技術(2018年3期)2018-06-26 06:33:30
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
海峽科技與產業(2016年3期)2016-05-17 04:32:12