雙軸精密離心機反轉臺精密姿態調節機構的設計與分析
2020-09-09 00:35:18趙世鵬
導航與控制 2020年3期
呂 磊,趙世鵬,舒 楊
(中國工程物理研究院總體工程研究所,綿陽621900)
0 引言
高精度的精密離心機主要用于對慣性設備的標定,例如加速度計、陀螺等儀器儀表[1]。國內對線加速度計的校準主要是靜態校準,例如離心試驗、重力場試驗等;動態校準主要是以線振動臺為主進行的校準[2-3]。然而隨著技術的發展,我國精密離心機正朝著更精確的加速度不確定度水平、大負載、多軸、溫度試驗等方向發展,測試對象也從單一的加速度計擴展到慣性平臺及捷聯慣組[4]。因此,國內相關單位逐步開展了雙軸精密離心機的研發工作,以期填補相關技術空白。
楊亞飛[5]研究認為,被測試加速度計在離心機上的安裝姿態誤差和精密離心機主軸姿態誤差是影響加速度計測試和標定準確度的重要因素。任順清等[6]則研究了精密離心機主軸回轉誤差中以此諧波對離心機瞬時工作半徑的影響。王洪波等[7]則對單軸精密離心機結構誤差對其運動精度所造成的影響開展了深入分析,并指出主軸回轉系統半徑誤差、傾角誤差隨主軸鉛垂度誤差的增加而線性增加。綜合上述研究及相關資料,雙軸精密離心機中,工作在離心場中的從軸(或稱為反轉臺)其自身運動軸線的鉛垂度是整機實現較高加速度不確定度的重要環節。對雙軸精密離心機,國外公開發表的研究較少且相關內容的敘述模糊不清[8-9],而國內的相關研究則主要集中在反轉平臺的動態平衡[10-12]等問題上,缺乏相關姿態調節功能,暫未在公開發表資料中見到相關研究內容。
因此,本文針對臂式雙軸精密離心機的從軸反轉臺在靜態下的軸線鉛垂度精密姿態調節開展研究,對雙軸精密離心機所采用的精密姿態調節機構開展了設計與分析,創新地提出了一種具備可多方向精密調節的鉛垂度姿態調節機構,并對其精度、受力、變形等方面進行了計算分析與討論。
1 雙軸精密離心機反轉臺精密姿態調節的功能需求
1.1 雙軸精密離心機工作原理
雙軸精密離心機的構成如圖1所示。在離心機主機中心,具有一套安裝在地面的精密旋轉主軸,支承離心機轉臂/轉盤及其上的附屬機構。在轉臂/轉盤末端,安裝有一套精密、平行于中心主軸的從軸。隨主軸旋轉時,從軸在轉臂上同時旋轉,因其旋轉方向通常與軸承方向相反,故從軸轉臺也稱作反轉臺。當反轉臺轉速大小與主軸相同、方向相反時,可為反轉臺上安裝的被測試件提供 “0”梯度的加速度場。
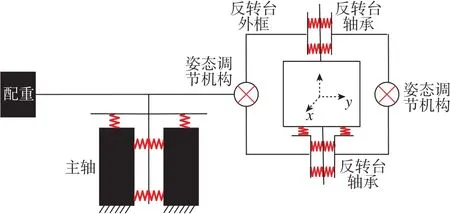
圖1 雙軸精密離心機反轉臺示意圖Fig.1 Schematic diagram of the counter-rotating table in double axis precision centrifuge
1.2 雙軸精密離心機反轉臺功能需求與分析
雙軸精密離心機的反轉臺工作在高g值(g為標準重力加速度)離心場下,為實現反轉臺旋轉軸線與離心機地面主軸的平行度要求,以達到足夠高的離心場梯度精度,必須實現反轉臺整體在鉛垂方向上具備調節精度達到鉛垂度±10′范圍以內,從而在由于某些因素導致從軸與主軸平行度較差時,可以實現從軸鉛垂度的調節,恢復主軸、從軸之間的平行度關系。同時,由于反轉臺需要搭載20kg質量的試件,抵抗50g的離心場作用,該姿態調節機構還需滿足足夠的受力與變形要求。
結合圖1所示,離心機轉臂末端為反轉臺系統,反轉臺內部由軸承、內框、外框以及兩套姿態調節機構組成。分析可知,為保證反轉臺系統可實現姿態調節,應使得反轉臺系統整體相對轉臂是 “浮動”的,并且可在非鎖緊狀態下實現對反轉臺軸線的微動調節。在鎖緊狀態下,可承載反轉臺在50g離心場作用下的受力。從空間上講,主軸與從軸需滿足空間平行度要求,故反轉臺應實現空間姿態的調節。姿態調節機構中的固定件與轉臂固定連接,運動件與反轉臺的外框固定連接,從而保證反轉臺整體隨外框在調節機構的限定范圍內進行繞x軸和y軸方位上角度的微小精密調整,實現鉛垂度±10′(俯仰角、偏擺角)的要求。
初步分析,反轉臺姿態鉛垂度±10′可通過合理設計具有空間3個方向旋轉自由度的機構實現,避免在±10′結構件之間發生干涉即可。從受力上看,估算反轉臺整體質量約1t,在50g離心場下對姿態調節機構形成約50000N的作用力,方向沿離心場方向,合理選擇材料、設計,保證結構件足夠強度,即可滿足所需的受力條件。因此,初步分析認為,所涉及的指標要求是可實現的。
2 姿態調節機構的設計
2.1 球面調整定位
為實現反轉臺框體整體角度在圖1所示的x和y方向上同時調節,設計的姿態調節機構主要由精密配合的球運動副(凸、凹球面)組成。相比萬向節,相互配合的球面之間在保證充分潤滑的前提下,具有更高的角度調整靈敏度、更小的摩擦力,可實現角度的精密、微力、微量調節。另一方面,由于本文中的反轉臺工作在高g值的離心場下,在工作中將受到離心場作用,沿離心場方向受力顯著放大。而采用球面配合,增大了受力接觸面積,提高了姿態調節機構的承載能力,避免了受力后的大變形對精度的影響,如圖2所示。

設計中,采用了左右對稱各布置一套配合球面的方案。理想地,在調整過程中,以反轉臺內框架幾何中心位置為調整中心,則要求兩套配合球面的球心均為該中心,以實現兩個球面的同時、配合移動。結合反轉臺安裝等其他方面的要求,設計球運動副直徑為2000mm,球心位于框體中心。因此,由于球心與框體中心重合,理論上反轉臺框體可實現保持中心位置不發生各方向位移的前提下進行球坐標系下的角度調節。

圖2 反轉臺姿態調整用球運動副機構三維模型及其示意圖Fig.2 3D model of counter-rotating table and schematic diagram of the attitude adjusting sphere joint
如圖3所示,反轉臺框體與凸球面固定連接,且凸球面上有一根較長的調整桿沿球面法向向外延伸。凹球面與轉臂固定連接(轉臂未在圖中示出),凹球面中心有孔,凸球面調整桿從其中穿過。安裝完成后,左右2套配合球面均密切貼合。工作時,通過對調整桿在各個不同的方向上施加作用,使反轉臺框體在球面定位下進行旋轉姿態的調節。
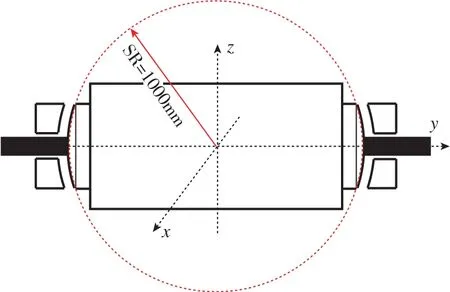
圖3 兩組球運動副組成的角度姿態調節能力示意圖Fig.3 Schematic diagram of the attitude adjusting sphere joint
事實上,為保證±10′的角度調節行程要求,結合球面直徑2000mm,只需保證接觸球面中固定凹球面的中心角比凸球面的中心角大±10′即可。但是,為保證球副之間有足夠的接觸面積,應增大凹球面面積和體積以適當提高強度、減小變形和應力集中,故本方案中采用凹球面的中心角比凸球面的中心角大±1°的設計。
2.2 萬向節精密螺桿
凸球面延伸穿過凹球面中心孔直至外部的調整桿是用于對反轉臺框體施加作用,使其在球面內發生相對旋轉運動的作用點。如圖4所示,萬向節精密螺桿組件包含:精密螺桿、鎖緊螺母、萬向節以及從凸球面延伸出來的調整桿。
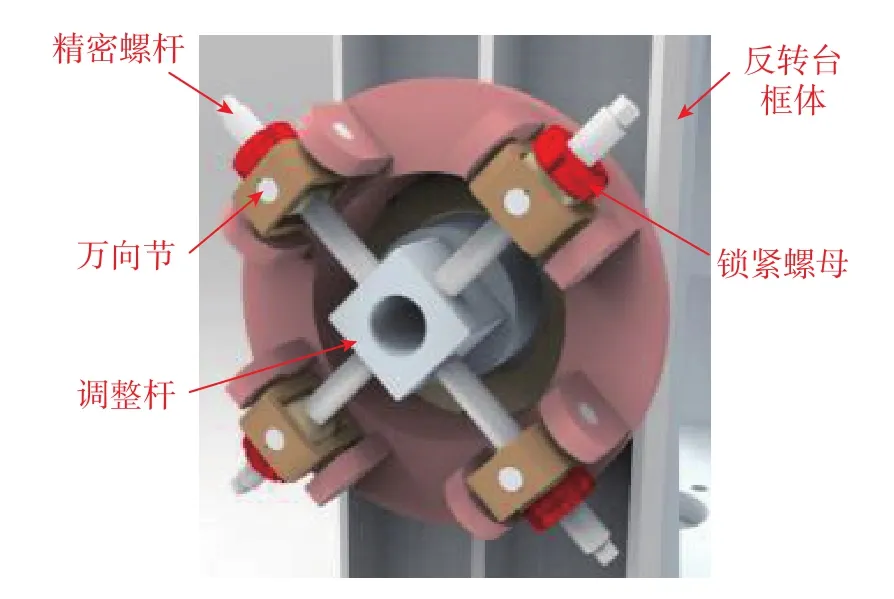
圖4 姿態調節精密螺桿組件示意圖Fig.4 Schematic diagram of the attitude adjusting precise screw bar components
如圖4所示,本文研究中,調整桿截面設計為正方形,直角邊與鉛垂線成45°夾角。精密螺桿頭端面成規則平面,理想情況下與調整桿的四方平面實現完全的面接觸。4組精密調節的螺桿沿調整桿周向4個平面均勻布置,也與鉛垂線成45°夾角,互相之間成90°夾角。精密螺桿與萬向節通過螺紋連接,螺桿可沿萬向節內的螺紋方向旋轉伸縮移動。精密螺桿頭端的平面與調整桿的四方平面完全面接觸,且可以產生平面內的相對移動,螺桿與調整桿之間的作用力沿接觸平面的法向方向。
反轉臺調整其O-xz平面內(即繞y軸)鉛垂度如圖5所示,調整桿初始位置為圖5中的黑色實線。調整過程為:首先將4組精密螺桿旋松,調整桿在O-xz平面內旋轉(即繞y軸旋轉),調整至合適角度后,將4組精密螺桿依次旋緊,使得螺桿頭端平面與調整桿四方平面完全接觸,且相互之間不再發生相對運動,調整后的位置為圖5中的黑色虛線。由于螺桿安裝在萬向節上,螺桿隨調整桿角度變化而變化的同時保持良好接觸和受力,即螺桿可始終與調整桿的相應接觸面保持垂直,但此時螺桿與調整桿的接觸位置產生了微小平移。
反轉臺框體在O-yz平面內角度調整的簡化模型示意圖如圖6所示,初始位置時的反轉臺框體、螺桿位置為圖6中的實線。松開所有精密螺桿與調整桿的接觸,通過精密螺桿調整反轉臺框體在球運動副內的相對位置,達到所需的角度值θ,依照一定次序旋緊所有精密螺桿。由于萬向節的作用,可以保證在調整過程中精密螺桿的頭端平面與調整桿的四方平面始終保持良好的平面接觸,但仍可在接觸面內產生相對滑移。
基于兩組同直徑、共球心的配合球面接觸作用,可以較大程度地保持反轉臺框體作為一個整體在球運動副內進行全向的旋轉運動,進行相對角度關系和姿態的調節。兩套共8組精密螺桿配合萬向節,實現多方向角度變化下螺桿對調整桿的有效接觸與支承。
為實現球面接觸良好的相對運動,在凹球面(相對轉臂固定的球面)上開設有氣體靜壓節流小孔,在運動時可采用對凹球面供給具有一定壓力的潔凈氣體,在配合球面上形成氣體靜壓軸承原理的氣膜,實現配合球面的低摩擦球面運動,從而提高反轉臺框體對運動響應的靈敏度,實現螺桿驅動下的全向角度精密調整。
精密配合的球面是實現反轉臺旋轉的核心,而精密螺桿的調節能力是反轉臺姿態精度調節的核心問題。已知本方案中的球面半徑為SR=1000mm,當一套(共4組)精密螺桿在O-xz平面內成垂直布置,假定實際工程中,操作螺桿完整地旋轉一圈是操作調整過程中較為容易實現的,工程中實際可控的精密調節步長為δ,即精密螺桿螺距為δ。已知球面半徑,當螺距取值δ=1.5mm時,有

實際工程中,操作控制精密螺桿每次旋轉半圈,則螺桿可有效準確控制旋轉半圈(180°),則螺桿調整精度約為2.578′,即當旋轉精密螺桿半圈時,臺面鉛垂度可產生2.578′的角度變化。通過一系列逐步精密調整,可實現鉛垂度10′以內的精度要求。
3 姿態調節機構的受力分析與討論
機構調節的目的最終都是把反轉臺調節到了鉛垂度要求較高(±10′)的范圍內,實際上對機構的受力分析只需要校核最大誤差情況下的受力就可以了,其余條件下的受力必然滿足要求。
3.1 球運動副組件受力的有限元分析
球運動副組件采用38CrMoAlA軸承鋼,材料具有較好的剛性、強度和穩定性,在調質和表面滲氮后具有良好的表面耐磨性。由于反轉臺外框承載整個反轉臺軸承、臺面、被測試件等部組件,而姿態調節機構承擔調整個反轉臺外框并實現其精密調節姿態。因此,總質量為1t的反轉臺在50g離心場作用下產生的作用力將全部作用在轉臂遠端的一對球運動副上,如圖7所示。

圖7 球運動副的配合球面組件示意圖Fig.7 Schematic diagram of the sphere joint components
球運動副設計直徑為2m,假設最差情況下(即最大角度調整時),凸球面與凹球面之間將達到最大的角度差(即10′),如圖8所示。此時,理論上講,凹球面上的受力是不均勻的,且受力面不再對稱,但是受力面積未發生變化,這可理解為作用在凹球面上的作用力在法向方向發生了一點變化,即產生了一個分量

Fx僅為總受力F的0.29%,故在球運動副組件的受力有限元分析中,可以不考慮角度偏差對球運動副受力造成的影響,按照作用力為垂直的法向方向進行分析即可。
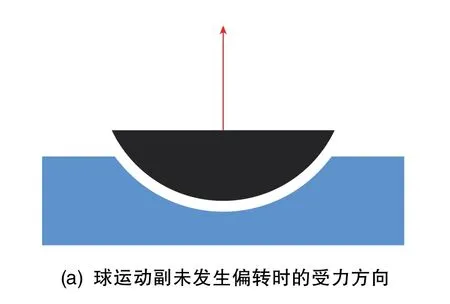
圖9為球運動副受力的有限元計算結果。圖9(a)中,最大應力發生在凹球面內圓孔倒角處,應力值為50.73MPa。圖9(b)中,最大變形發生在凸球面組件的安裝面(即受力面)上,變形量約為6.24μm,由于變形量非常小,故變形對姿態精度等的影響可以忽略不計。

圖8 球運動副受力方向示意圖Fig.8 Schematic diagram of the sphere joint in the forced direction

圖9 球運動副受力有限元分析Fig.9 FEM analysis of the sphere joint
3.2 精密螺桿的受力計算分析
理想情況(即反轉臺姿態誤差為0,無需進行任何調整)下,在正常運行過程中,反轉臺外框體與轉臂方向一致,如圖10所示。假設凹球面與凸球面嚴密、良好配合,則反轉臺在重力方向和離心場方向上的絕大部分受力都是由球運動副來承擔的,包括反轉臺的重力和離心場作用力。此時,反轉臺調姿用精密螺桿是不受力的,僅在離心機啟動、轉速變化、停止的過程中,精密螺桿需向反轉臺框體提供作用力,使反轉臺隨轉臂整體運動。
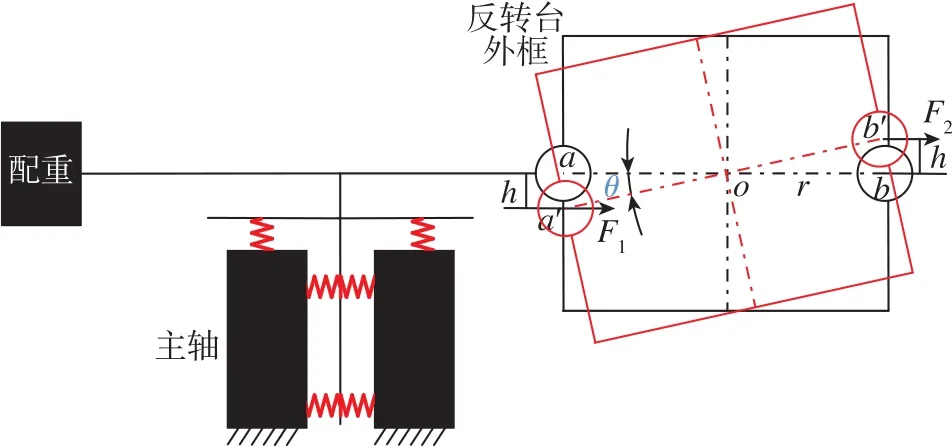
圖10 最大誤差θ=10′時的調節機構受力分析示意圖Fig.10 Schematic diagram of load analysis with maximum error θ=10′
如圖10所示,理想情況下,反轉臺外框與水平方向的夾角為0°(圖10中右側的黑色實線框),此時反轉臺鉛垂度為理想的0°。假設反轉臺經過調整后,鉛垂度剛好調節至θ=10′的情況(符合要求的最差情況,圖10中右側的紅色實線框),此時反轉臺外框與水平方向的夾角為θ=10′, 由于離心場對反轉臺左右兩部分的作用力不再共線,而是與水平線形成偏移距離h,由于反轉臺框體尺寸較大(約2m),其離心場梯度不可忽略。根據受力分析,容易得到:F1<F2、M1<M2, 因為球運動副無法產生相應的平衡力矩,所以需要由精密螺桿提供。
已知反轉臺中心點o與主軸的距離為6m,該位置處的離心場為50g,反轉臺半徑為0.65m,則得到反轉臺的離心場近點a和遠點b所處位置的離心場分別為41.67g和58.33g。忽略反轉臺調整角度誤差(θ=10′)對離心場梯度的影響,反轉臺的離心場近點a′和遠點b′的離心場仍為 41.67g和58.33g。假設反轉臺左右兩部分的集中質量均為1t,則有
則精密螺桿需提供的作用力Ft為

由計算結果可知,此時的精密螺桿受力較小。考慮最壞的情況,即只有最外側的調節機構受力,而該單側的調節機構全部作用力又都集中在其中1根精密螺桿上,此時調節機構在Ft作用下的變形云圖如圖11所示。

圖11 精密螺桿有限元分析云圖Fig.11 FEM analysis of the precise screw bar
此時,帶萬向節的精密螺桿變形最大約為0.47μm,最大應力為1.1561MPa。因此,本設計中姿態調節的精密螺桿受力良好,工程上易于實現。
4 結論
本文探討了利用兩組同直徑的球運動副進而實現反轉臺在空間上多個角度的運動調節能力,再利用帶有萬向節的4組精密螺桿,配合反轉臺在球運動副內的微小角度調節,從而實現雙軸精密離心機所需的反轉臺鉛垂度精度。
經過受力分析可知,反轉臺在離心場方向和重力場方向上的受力主要由配合球運動副承受。當反轉臺鉛垂度調節至最大允許誤差(10′)時,由于離心場作用而形成的力矩由精密螺桿來平衡。經過受力分析,可知該工況下精密螺桿受力較小,狀況良好。綜上所述,本文所分析的姿態調節機構可以滿足雙軸精密離心機的反轉臺姿態精密調節的設計要求。
文中沒有對球運動副的受力開展分析。實際上,由于在離心機的設計中,球運動副的設計沒有受到尺寸以及重量方面的嚴格限制,故在合理選擇球運動副的材料,完成結構形式以及尺寸等重要參數的合理設計和優化之后,可以實現球運動副在變形和應力集中方面的良好設計結果。