基于車身傳感器的自主泊車建圖與定位功能實現
2020-09-10 04:37:23張潛
內燃機與配件 2020年23期
張潛

摘要:隨著科技水平的提升,汽車制造行業逐漸向著現代化、自動化、智能化的方向發展,汽車功能逐漸增加,其中就包括自動泊車功能,可以識別周邊環境精準定位,為駕駛者提供巨大的便利。本文主要以自主泊車為研究對象,圍繞于車身傳感器的自主泊車建圖與定位功能實現展開探討,先分析主流定位方案的利弊,接下來基于車身傳感器確定方案思路,最后研究建圖和定位系統的設計過程,測試實際的定位效果,希望為自動泊車系統今后的研發提供一定參考借鑒。
Abstract: With the improvement of the level of technology, the automobile manufacturing industry is gradually developing towards modernization, automation, and intelligence. The functions of automobiles are gradually increasing, including the automatic parking function, which can identify the surrounding environment and provide precise positioning for drivers. convenient. This article mainly takes autonomous parking as the research object, and discusses the realization of autonomous parking mapping and positioning functions of the body sensor. The pros and cons of mainstream positioning schemes are analyzed first, then the idea of the scheme is determined based on the body sensor, and finally the mapping and positioning are studied. The system design process, testing the actual positioning effect, hope to provide a certain reference for the future research and development of the automatic parking system.
關鍵詞:車身傳感器;自主泊車;建圖;定位;功能實現
Key words: body sensor;autonomous parking;mapping;positioning;function realization
中圖分類號:U463.6? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2020)23-0202-03
0? 引言
自動泊車主要是在停車位附近操作,通過控制系統自動泊車入位,而自主泊車則是在自動泊車基礎上增加無人駕駛功能,在地下車庫自動穿行尋找車位。目前,自動泊車技術趨于成熟,但是實現難度更是相對較高,基礎環境建設、車輛設施等都要達到一定條件,才能保證自主泊車的精準性。本文主要基于車身傳感器展開設計,實現自主泊車建圖及定位功能,才能保證自主泊車的精準性,推動自動泊車技術向著智能化、自動化的方向不斷發展進步。
1? 主流定位方案利弊
汽車需要清楚感知周邊環境,同時精準定位泊車位置,才能實現自動代客泊車,為了達到上述要求,首先要選擇適合的定位方案,現階段成熟的定位技術較多,都存在一定的利弊,下面介紹幾種主流的定位方案,重點研究定位方案的優缺點:
第一,慣性導航系統(INS)。該定位方案的進度較高,可以快速更新實時數據,但是在使用一段時間后,會累積大量的誤差。第二,全球導航衛星系統(GNSS)。GNSS是現階段最為成熟的一種定位技術,但是汽車的行駛環境比較復雜,在地下車庫、隧道等位置還是會出現定位問題,包括信號丟失、精度低、多路徑等問題。第三,差分GNSS和INS組合定位。這種組合定位的精度更高,可以達到厘米級定位,但是成本相對較高,同時對于GNSS依賴性更強,現階段被應用與無人駕駛車輛。第四,高精度地圖(HDMap)定位技術。該方法的定位精度較高,但是在正式應用之前,需要結合當地情況構建高精度地圖,購置專業的硬件設備,花費大量的費用處理數據。第五,激光雷達里程計算法。這種定位方案較為成熟,擁有精度高、實時性強等優勢,但是在實際應用過程中,激光雷達占地面積較大,為此一般用于制作離線HDMap。第六,視覺傳感器定位技術,這種定位方案可以感知車輛周邊的環境信息,基本不受到車輛打滑等情況的影響,同時占用空間較小,可以快速安裝在行駛車輛上,后續可以結合實際需求拓展各個功能,造價成本更低。但是單純的視覺里程計(VO)存在一定的不確定性,提供的定位信息精準度較低[1]。
2? 基于傳感器方案的思路分析
根據上述研究內容可知,現階段主流的定位技術較多,包括INS、GNSS等,都存在一定的優點和缺點,其中最適合自主泊車的是視覺定位技術,但是視覺里程計定位技術限制較多,如果單純利用該定位技術,可能在實際定位過程中,會出現尺度不確定等問題,無法提供精準的數據信息,考慮到該情況后,決定將視覺定位技術作為基礎,將車身傳感器作為建圖與定位系統的核心部件。
首先,要先確定建圖與定位系統需要的傳感器裝置,正常情況下,汽車擁有的傳感器設備較多,都擁有不同的功能,為此要考慮到實際的定位需求,選擇幾種核心的傳感器作為系統的數據收集裝置。考慮到汽車自主泊車需求,最終選定三種核心傳感器裝置:一是車輛轉速傳感器,該傳感器可以收集車輛的輪速脈沖,這也是控制自主泊車的關鍵數據信息。二是轉角傳感器,該傳感器可以收集車輛的轉角信息,一般設置在方向盤中間位置,與車輛脈沖轉速相似,都需要提供給定位系統。三是前視魚眼攝像頭,該傳感器可以獲取車輛周邊信息,這也是最重要的傳感設備,為后續的建圖定位提供充足的數據信息支持[2]。
接下來,確定傳感器裝置后,還要實現多傳感器數據融合,不同傳感器獲取的信息存在一定的差異。建圖與定位系統運行期間運用車輛里程計定位技術,主要獲取二維信息,而前視魚眼攝像頭獲取的則是三維信息,為了融合不同形態的數據信息,就要先約束車輛位姿,才能串聯其不同的點位信息,這時候就要根據實際的定位需求合理設計約束條件。
最后,確定傳感器和數據融合方案后,已經為車輛自主泊車定位奠定良好基礎,定位階段依靠視覺傳感器檢測特征點位,在利用檢測到的點位匹配三維路標點位即可,就可以實現精準定位,這種傳感器定位方案不會受到特殊場景的限制,在地下車庫、停車場等場合也可以正常運行。
3? 建圖與定位系統設計
在設計建圖與定位系統時,主要從三方面入手,首先要科學運用車身傳感器,主要利用各類傳感器收集需要的數據信息,這也是建圖和定位系統正常運行的前提條件,接下來要科學展開車輛位姿計算,通過科學的約束條件融合二維及三維數據信息,最后要實現平面定位,利用前視魚眼攝像頭獲得特殊點信息,合理匹配三維路標點位[3]。
3.1 車身傳感器
車身傳感器主要用于收集汽車運行中的工況信息,包括車速、介質溫度、發動機工況等,收集到信息后轉化為電信號,輸入計算機系統,實現對車身的精準控制。建圖和定位系統主要利用車身傳感器收集三種信息:第一,車輛輪速脈沖。車輛通過轉速傳感器收集到輪速脈沖,這些信息正常情況下用于控制VDC、ABS、ESP等系統,這也突出了轉速傳感器的重要地位,在建圖定位系統中,轉速傳感器負責傳輸車輛輪速脈沖,為車輛自主泊車提供數據支持。第二,車輛轉角信息。車輛行駛期間主要依靠轉角傳感器獲取轉角信息,通過轉角信號可以了解車輛轉動的方向、角度、速度等信息,一般將傳感器設置在方向盤中間位置上,在建圖與定位系統中轉角信息用于確定車輛泊車路線。第三,前視魚眼攝像頭。攝像頭主要用于獲取車輛附近的環境信息,魚眼鏡頭焦距較短,屬于廣角鏡頭的一種,可以最大化獲取周邊環境信息,避免車輛自主泊車時碰撞到周邊障礙物,同時也是建圖定位系統的核心裝置,提供絕大部分的建圖信息[4]。
在設計建圖與定位系統時,車身傳感器負責收集相關數據,同時還要融合到一起,實現多傳感器數據融合,其中最為關鍵的就是視覺傳感器及車輛里程計,融合后才能提供建圖與定位需要的數據信息。
3.2 車輛位姿計算
在通過車身傳感器收集需要的數據信息后,接下來要展開對車輛位姿的科學計算。正常情況下,車輛里程計只能得到二維平面信息,而視覺計算車輛位置則完全不同,可以得到單位信息,為了融合兩種不同的數據信息,這時候就要實現對車輛位姿的約束處理,將其限制在二維平面上,接下來要處理好擾動信息,將其作為噪聲項,集成到SE(2)-XYZ約束中,該約束可以順利串聯出二維及三維信息,主要利用圖像特征點檢測方法,將三維的特征云信息對應到二維的位姿信息上,形成一個穩定的融合狀態。最后,要科學利用約束條件,逐漸構建出常用圖優化結構,這樣就得到了穩定的定位和建圖系統,系統主要依靠視覺里程定位。
可以看出,車輛位姿計算也是建圖和定位系統的重要設計環節,重點是將二維及三維信息聯系到儀器,這就需要先約束車輛位姿,定位在二維平面上,就可以利用一定的約束條件及方法聯系二維位姿及三維特征點云信息,得到一個自動泊車的圖紙信息[5]。
3.3 平面定位實現
在完成車身傳感器數據融合及車輛位姿計算后,就可以進入到平面定位實現環節。在車輛定位過程中,主要依據視覺傳感器,前視魚眼攝像頭可以檢測當前環節,找到關鍵的特征點位,將這些點位上傳到建圖和定位系統,找到與之匹配的三維路標點位,在匹配過程中,要滿足兩大要求,一個就是保證匹配的精度,這也是順利完成自動泊車的前提條件,一旦匹配精度沒有達到要求,就可能出現定位不精準的現象,導致車輛碰撞到障礙物,引發一系列的問題。另一個就是保證系統的魯棒性,該特性是對Robust的音譯,主要是指特殊情況下系統的生存能力,在車輛自動泊車遇到一些特殊情況時,也要保證建圖及定位系統正常運行,才能保證車輛及駕駛者的安全性,在滿足上述兩大要求的基礎上,要保證車輛可以精準在平面環境下定位。建圖與定位系統可以在特定場景下穩定運行,例如地下停車庫、隧道等,精準發揮定位功能,為后續的自動泊車提供穩定技術支持。
通過合理的規劃研究,設計得到建圖與定位系統,主要基于車身傳感器完成設計工作,接下來還要展開合理的測試,重點測試定位效果,確認各項指標均達到設計要求后,才能進入到試運行階段。
4? 建圖和定位效果測試
在建圖與定位系統設計結束后,還要接受建圖和定位效果測試,選定一些特定場景,為驗證建圖精度,以RTK數據為真值,對比驗證建圖數據,來驗證建圖精度;為驗證定位效果,以地下車庫及停車場的真實尺寸來驗證定位精度,分別測試系統的定位效果。
定位效果測試過程如下:選擇相同的測試車輛,選擇正常路面、地下車庫、地下停車場以及實驗場地作為測試場景,各測試標準和結果將在下文展示。
4.1 驗證建圖精度
建圖精度指SLAM建圖階段車輛在地圖中的行駛路徑與車輛實際行駛路徑的重合程度,用絕對軌跡誤差和相對位姿誤差來衡量建圖精度。
①絕對軌跡誤差(ATE)。
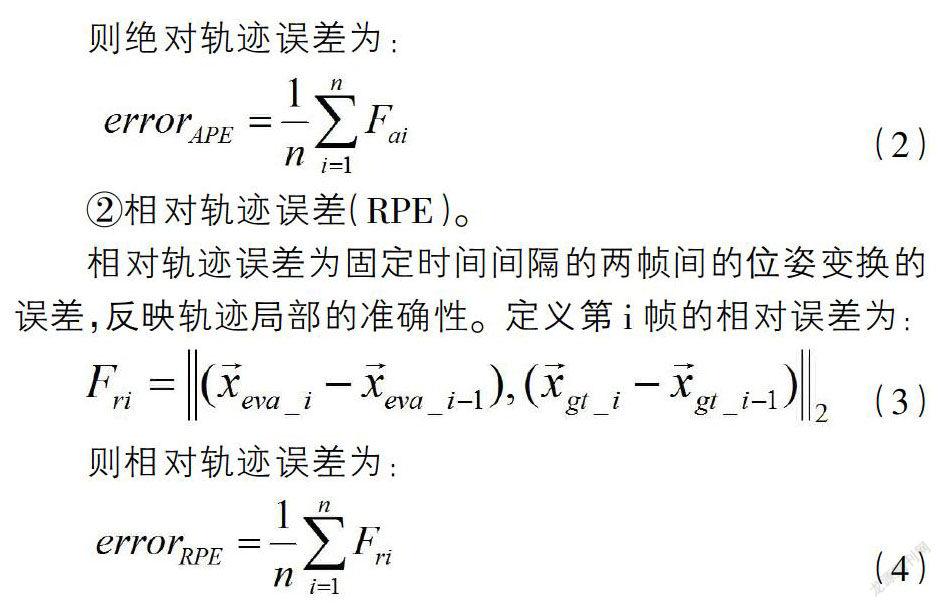
絕對軌跡誤差為建圖軌跡位姿與真實軌跡位姿的直接差值,直觀反映建圖精度、軌跡全局一致性。定義第i幀的絕對誤差為:
在所述測試環境下,開啟SLAM,車輛分別沿直線、直線加一次轉彎和直線加兩次轉彎形式的路線行駛50m左右,車輛行駛過程中同步保存RTK數據作為行駛軌跡的真值,車輛停止后,完成SLAM建圖。同步并對齊RTK軌跡和SLAM軌跡,使用式(1)和式(2)計算APE和RPE。
建圖精度:
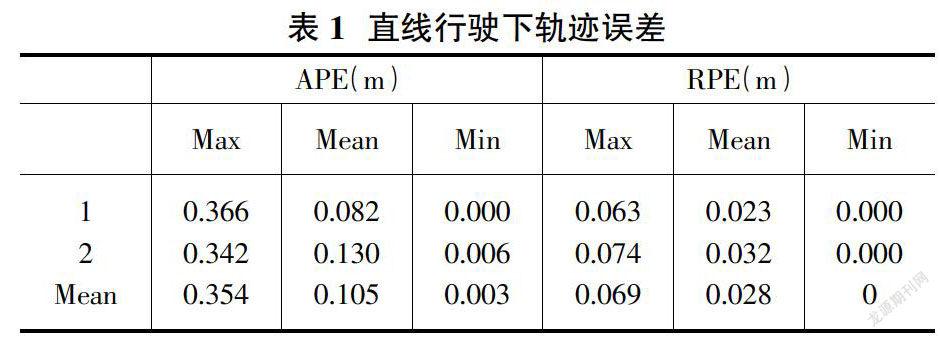
①直線行駛。
沿直線行駛,記錄SLAM和RTK數據,計算軌跡誤差,統計結果如表1。
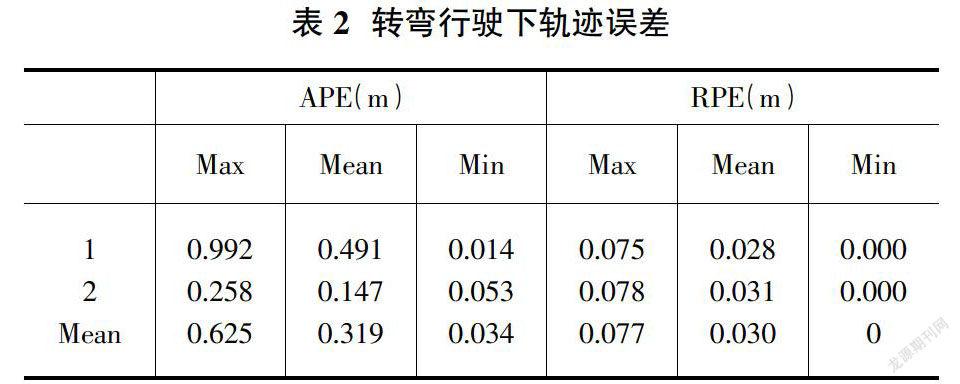
②一次轉彎。
行駛過程中進行一次轉彎,記錄SLAM和RTK數據,計算軌跡誤差,統計結果如表2。
4.2 定位精度
定位精度指SLAM定位階段車輛定位位置與車輛的實際位置的重合程度,用橫向誤差errorloc? x和縱向誤差errorloc? y來衡量定位的精度。用(xloc,yloc)和(xgt,ygt)來表示定位位置和真實位置,則誤差可表示為:
以兩種方式驗證定位精度:
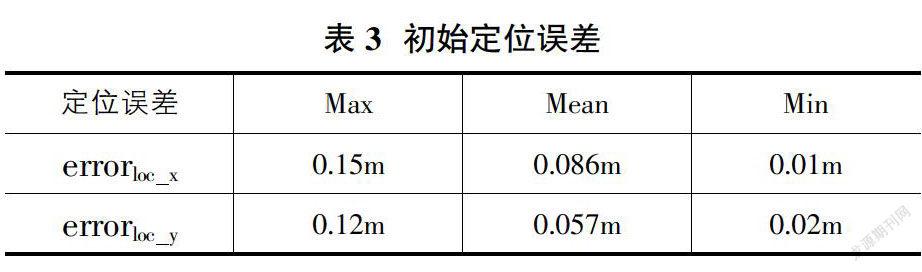
方式一:驗證車輛開啟定位誤差,車輛停在SLAM建圖路線上的任意位置(距離建圖軌跡橫向距離±50cm之內),并記錄該位置真實坐標,開啟SLAM定位模塊,得到SLAM定位結果,利用式(5)和式(6)計算定位誤差。結果如表3。
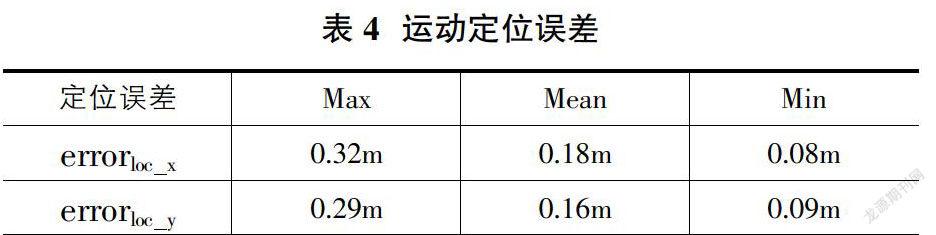
方式二:驗證車輛運動定位誤差,車輛停在SLAM建圖路線的任意位置(距離建圖軌跡橫向距離±50cm之內),開啟SLAM定位模塊,沿建圖路徑行駛到建圖路徑終點后停住,得到SLAM定位結果,利用式(5)和式(6)計算定位誤差。結果如表4。
4.3 定位成功率
定位成功率指車輛在建圖路徑上任意位置進行定位,定位成功的次數與定位總次數的比值。測試結果如表5。
經過一系列的測試后,發現所有測試項目的定位效果都達到設計要求,可以實時更新數據信息,完成建圖和定位工作,測試期間沒有出現任務問題,順利通過測試。在測試過程中,還重點檢查了建圖與定位系統的核心部分,包括車身傳感器、車輛位姿計算及平面定位,完全與模擬仿真過程一致,沒有出現任何意外情況。
經過一系列的測試后,確定自主泊車建圖與定位功能完全實現,充分發揮車身傳感器定位技術的優勢特點。
5? 結束語
綜上,主流的自動泊車定位技術都存在一定的利弊,經過研究討論后決定選擇視覺定位技術,結合實際的泊車需求合理優化改進,基于車身傳感器設計出自主泊車的建圖與定位系統,順利通過定位效果測試及定位效果測試,完全達到預計的定位效果。在設計建圖與定位系統時,核心設備為車身傳感器,可以利用多種傳感器收集車輛運行的信息,實現多傳感器數據融合,通過限制車輛姿位的方式將二維和三維點位聯系到一起,定位時可以利用視覺傳感器檢測當前環境點位,匹配三維點位后精準定位。
參考文獻:
[1]沈中偉,向陽.基于RSU/OBU和壓力傳感器的車身精確定位系統[J].內燃機與配件,2019(009):196-197.
[2]辛鑫.基于多傳感器信息交互的自動泊車系統關鍵技術研究[D].2019.
[3]劉澤.基于深度學習和OpenCV的自動泊車車位視覺檢測與定位系統設計[D].2020.
[4]盧振興,曾云.基于深度學習和多傳感器信息融合的全場景自動泊車技術研究和應用[J].環渤海經濟瞭望,2019(007):197.
[5]畢清磊.自動泊車輔助系統的研究與開發[D].2018.