基于車流量的信號燈及車道數智能調節系統設計
2020-09-14 04:33:24盧明宇
唐山學院學報 2020年3期
關鍵詞:模型
潘 濤,盧明宇
(1.安徽三聯交通應用技術股份有限公司,合肥 230601;2.安徽三聯學院 交通工程學院,合肥 230601)
0 引言
隨著經濟的發展,汽車數量急速增長,交通擁堵成為普遍現象。傳統的紅綠燈和導向車道不能很好地緩解交通擁堵,致使汽車尾氣排放量增加,造成環境污染。
在交通流預測方面,BrianL Smith和MichaleJ Demetsky對比了交通流預測的歷史平均、時間序列和非參數回歸模型;Lee S等使用實際數據實驗和對比分析了多元回歸、ARIMA、神經網絡、卡爾曼濾波四種短時交通預測方法[1];史其信、鄭為中對四種不同的道路網短時交通流預測方法進行了比較。英國運輸與道路實驗室(TRRL)成功開發出TRANSYT(Traffio Network Study Tools)交通控制系統后,又在TRANSYT的基礎上開發了SE00T系統;澳洲科學家研究出了實時交通配合方案,即有選擇、階段性地進行交通系統調整和控制的SCATM系統[2]。這些控制系統在歐美發達國家的道路網絡中得到了廣泛的應用。
僅依靠對交通流的預測并不能解決交通擁堵、道路時空利用率低的問題,而應以科學化、智能化的手段進行調配,提高通行效率,對緩解城市交通擁堵、減少資源浪費有著巨大的現實意義[3]。因此本研究基于車流量設計了信號燈及車道數智能調節系統,擬解決上述問題。
1 數據收集及算法
1.1 數據收集
運用紅外傳感器對城市道路各流向交通流進行檢測,得到路口各流向車流量,將獲得的交通流數據運用BP神經網絡和自適應網絡組成的模糊神經推理系統進行處理,利用神經網絡的自學習能力對所獲得的每個周期參數進行計算,使計算的結果不斷優化,快速得到最優解,從而獲得短時交通流預測結果。通過對合肥市金寨路與湯口路交叉路口交通流量進行調研,獲得車流量數據如圖1至圖4所示。
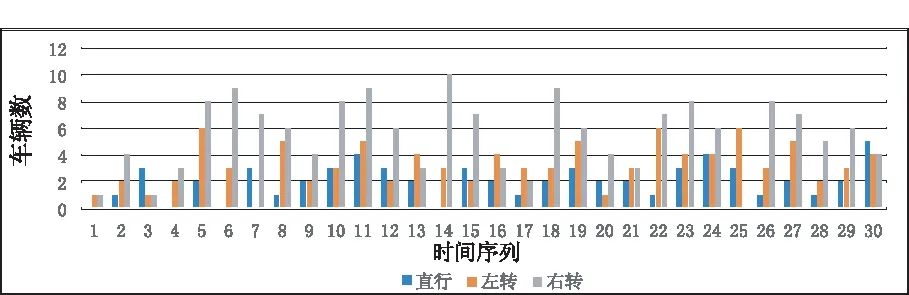
圖1 湯口路西進口車流量數據
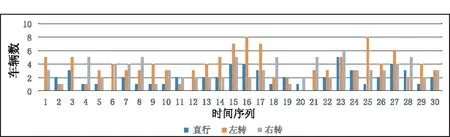
圖2 湯口路東進口車流量數據
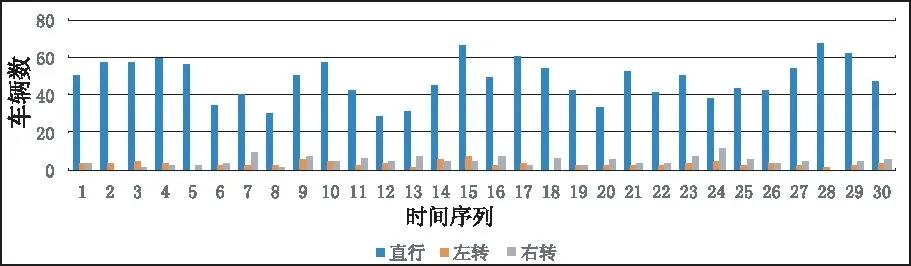
圖3 金寨路北進口車流量數據
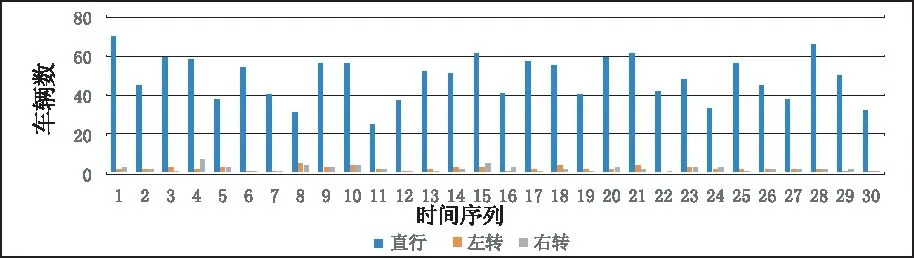
圖4 金寨路南進口車流量數據
1.2 BP神經網絡算法
神經網絡算法作為一種模擬人腦神經網絡的數學模型,其本質是反映輸入如何轉化為輸出的一種數學表達式,而數學表達式取決于由具體的問題和數據訓練及設計的神經網絡結構。神經網絡算法具有并行計算能力、非線性全局作用、聯想記憶能力、容錯能力、強大的自適應和學習能力等特點,它的基本處理單元和人腦神經一致,即神經元,一般是一個具有多輸入、單輸出的非線性單元[4],因此,其構成包括輸入區、處理區以及輸出區。神經網絡算法應用最為廣泛的算法模型為BP神經網絡算法(多層前饋網絡的誤差反向傳播算法),模型主要結構是分層網絡,即將神經網絡分為輸入層、隱含層和輸出層。其中,輸入層的作用是接收外部信號,并將接收的外部信號通過層與層之間的神經元傳遞至中間層,而隱含層是神經網絡的內部處理單元,根據處理問題的不同,隱含層可以有多層,也可以沒有多層。系統的輸入變量和輸出變量個數主要由神經網絡輸入和輸出的節點數體現,輸入變量和輸出變量越多,節點數越多。需要說明的是,在BP神經網絡的每一層中都有獨立的神經元數、權重值、偏差和激活函數,層與層互不影響。BP神經網絡模型見圖5。
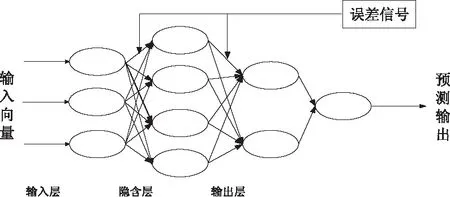
圖5 BP神經網絡模型
將收集到的數據通過BP神經網絡算法對交通流進行預測,依據預測的交通流,對車道的屬性進行改變。車道的屬性改變后車道數也會發生相應的改變,運用改變后的車道數結合改進后的韋伯斯特模型對交通信號燈配時進行優化。
2 模型建立
基于以上設計方案,利用神經網絡預測4個方向直行、左轉的交通流,建立基于改變車道直行、左轉方式的韋伯斯特模型,其主要實現方式如下。
(a)假設根據神經網絡預測4個方向直行與左轉的交通流分別為q1,q2,q3,q4,q5,q6,q7,q8,且選擇其中對向車道中的較大交通流分別為qi,qj,qk,ql,其中qi,qj分別代表南北直行、左轉方向上主要的交通流;qk,ql分別代表東西直行、左轉方向上主要的交通流。
(b)確定交通流后,因相同車流方向的交通流在某一路段內的交通量變化不大,所以使用雙向車道同步改變車道指示方向的方式,即分為a1南北對向直行、a2南北對向左轉、a3東西對向直行、a4東西對向左轉這4種變換方式來對車輛的道路通行權進行重新劃分。變換狀態后的車道使用韋伯斯特模型來對其進行信號燈相位配時。
設南、北、東、西車道總數分別為n1,n2,n3,n4,每個進口道處設置一條可變車道。南進口直行車道數為nz1,南進口左轉車道數為nz2;北進口直行車道數為nz3,北進口左轉車道數為nz4;東進口直行車道數為nz5,東進口左轉車道數為nz6;西進口直行車道數為nz7,西進口左轉車道數為nz8。
將每個方向的可變車道直行、左轉狀態分別用wi=0或1來表示,則車道轉換方式可表示為:
(1)
(2)
經過實地調研后得出該路口每相位每輛車的停車延誤與啟動延誤為3 s。可計算出每種不同組合狀態下的交叉路口信號燈優化配時,又因為車起動與停車延誤時間與黃燈時間相同,則各相位有效綠燈時間即為綠燈顯示時間。
反應堆壓力容器本體螺孔材質為16MND5,主要用于制作核電工程中蒸發器、穩壓器、壓力容器及封頭、支撐部件。螺孔材質 16MnD5力學性能:HB=200,Rm=550-670Mpa,Rp0.2≥400Mpa;螺栓材料為 40NCDV7-0.3力學性能:Rp0.2≥900Mpa,Rm=1000-1170Mpa,HB=302-375。從力學性能來看,螺栓材質的硬度比法蘭螺紋的硬度(相差約100HB),螺栓在下旋過程中形成積屑瘤產生高溫并在螺紋之間產生塑性變形,使其硬度高于法蘭螺孔材質的硬度,積屑瘤在螺栓與螺孔螺紋之間,隨著螺栓的旋入在法蘭螺紋螺牙上留下了溝痕,造成了螺紋損傷。
根據收集的數據,通過車道寬度校正、坡度及大車校正可以計算出南北、東西直行和左轉車道的飽和車流率分別為s1,s2,s3,s4,且把車輛到達進入每個車道的概率當成等可能事件,則車輛行駛在每條車道上的概率相同。
建立基于優化車道后的信號燈優化配時模型,可列如下4種情況。
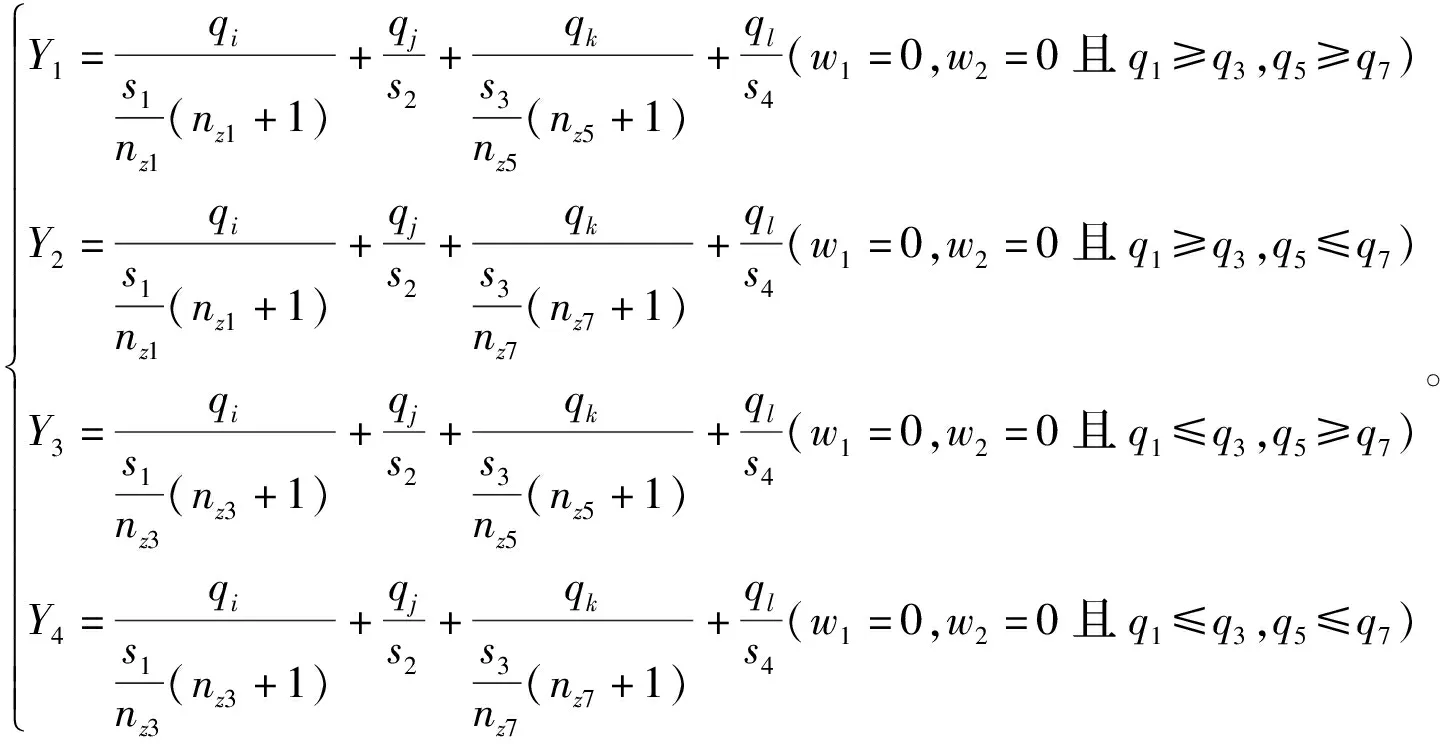
(3)
(4)
(5)
(6)
以上公式中,q為交通流,n為車道數,w為車道狀態,s為飽和車流率,Y為交叉路口交通流率。
根據得到的每周期內不同車流率的組合狀態,可以利用以下改進的韋伯斯特算法進行計算。
(7)
式中,c0為總周期,l為車輛延誤。
有效綠燈時間:c1=c0-l。
南北直行綠燈時間:
(8)
南北左轉綠燈時間:
(9)
東西直行綠燈時間:
(10)
東西左轉綠燈時間:
(11)
通過以上模型可以計算得到每個相位的信號燈優化配時,這樣便可以與未經優化的信號燈周期配時進行對比分析。
3 實例驗證
以合肥市金寨路與湯口路的交叉路口為例對信號燈優化配時進行驗證。其交叉路口簡圖如圖6所示。

圖6 合肥市金寨路與湯口路交叉路口簡圖
基于改變車道后信號燈配時的優化圖如圖7所示。

圖7 信號燈優化配時圖
經計算得到,南北直行方向的平均絕對誤差(MAE)為11.184,10.923,均方誤差(MSE)為217.553,195.787;南北左轉方向的平均絕對誤差(MAE)為3.182,2.502,均方誤差(MSE)為13.673,9.741。通過對比可知,本設計比正在使用的線性、非線性或者單一預測的精度高,能夠較好地擬合交通流的變化,為后期設置可變車道提供了較好的預測基礎,并為信號燈配時提供了理論基礎。
4 系統設計
4.1 設計流程
將高精度的BP神經網絡算法應用到交通流預測中,通過預測的交通流在道路合適的位置設置檢測器檢測車流量,并通過設置導向信號燈來對車輛進行合理的疏導,結合優化過的信號燈配時,可較大程度緩解交通擁堵。設計流程圖見圖8。
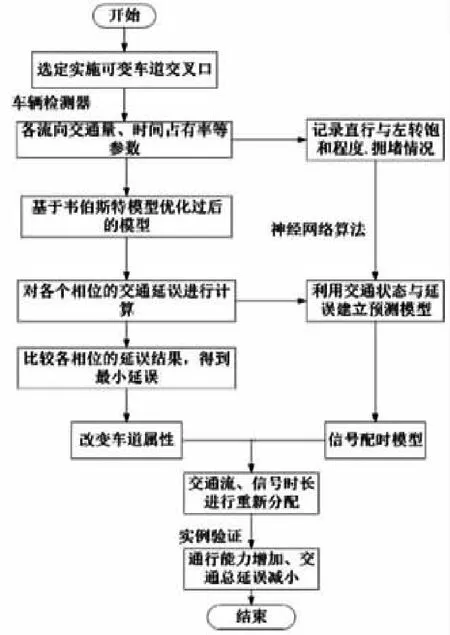
圖8 設計流程圖
4.2 相位內交通流分析
就上述的金寨路與湯口路交叉路口而言,通過對其道路進行分析,將其分為以下三個相位,如圖9所示。
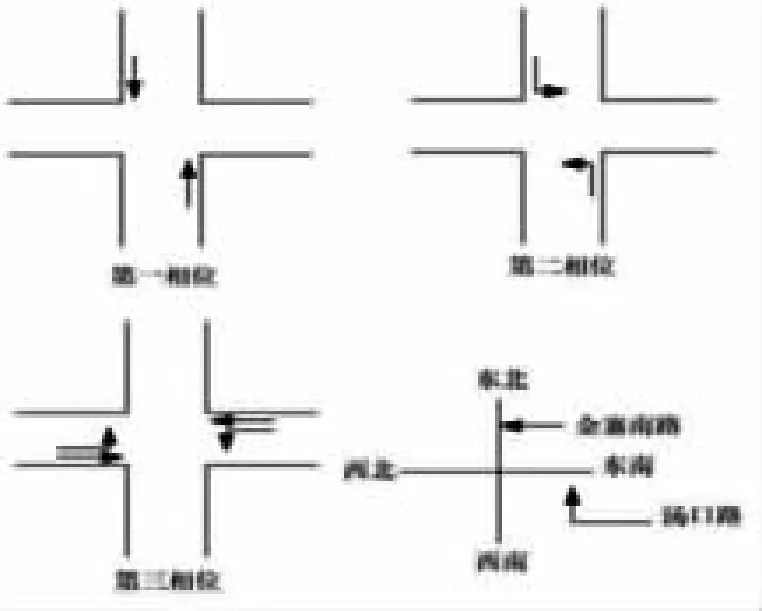
圖9 交叉路口相位圖
4.3 可變導向車道的選擇
設置可變導向車道在一定程度上可以緩解城市交通擁堵的問題[5]。其實現的方法是對所獲得的車流量數據進行定量分析,再得出固定時段相應的車道改變方案。通過對交通流的預測,結合延誤模型對比分析車道兩種屬性的延誤結果,并以此為改變車道屬性的變換條件,得到可變導向車道的最優狀態。
4.4 可變導向車道與信號燈配時相結合的分析
結合以上分析,在道路中設置一條可變車道,當車道屬性發生改變后對信號燈進行重新配時。基于此,提出如下方案。
選取交通信息中的交通量、占有率和飽和度等多個指標,構建短時交通狀態神經網絡預測模型,對后續時刻的交通狀態進行預測,從而形成車道變換的預決策,為形成真正的車道實時變換決策作準備。對設置可變車道的交叉路口進行交通運行仿真,分析左轉和直行車道交通擁堵狀態,并對可變車道轉變控制前后的交通延誤進行對比,以轉變后交通總延誤減小為原則來定義車道變換的組合條件。
4.5 可變導向車道的控制與仿真實驗
圖10為車均延誤結果比較,圖11為道路總延誤結果比較。
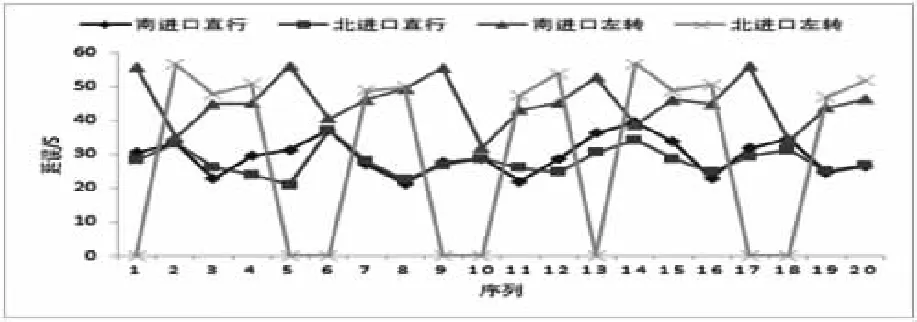
圖10 車均延誤結果比較
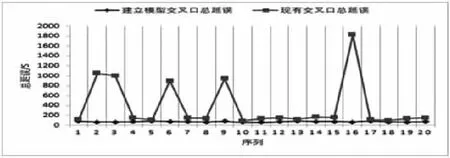
圖11 道路總延誤結果比較
圖11是在設置一條可變導向車道之后對南北進口的延誤建立模型并計算出的相應的延誤,即利用改進后的韋伯斯特模型計算相關變量,再通過延誤公式計算結果作出該圖。由該圖可知,在一定情況下可以實現可變車道的轉換,且通過可變車道最佳狀態的設置,該交叉路口的車輛延誤得到一定程度的減少。
5 結論
遵循傳統的道路交叉口渠化原則,將可變導向車道和常規車道組合設置在城市干道,支持常規的交通控制設施和信號控制技術,在可變導向車道行駛方向標識的協同作用下,根據車輛通行情況自動調整可變導向車道的規定行車方向。機動車通行高峰時段的仿真實驗結果顯示,與動態連續車道管理方法和靜態車道管理方法相比,復合動態車道管理方法能夠改善道路交叉路口的整體性能,能夠更加均衡地利用干道雙向的道路空間,這種性能優勢隨著交叉路口機動車交通負荷的提高而愈發顯著,而且結合現有道路上的直行待行區,可以增加車輛的通行效率,緩解交通擁堵。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19