礦用刮板輸送機(jī)的模糊PID控制調(diào)直方法研究
2020-09-19 02:23:44吳新佳
金屬礦山 2020年8期
關(guān)鍵詞:方向
吳新佳
(鄭州鐵路職業(yè)技術(shù)學(xué)院機(jī)電工程學(xué)院 河南 鄭州 450052)
采礦過程中的礦用刮板輸送機(jī)與采礦機(jī)械需要密切配合,其直線度偏差過大不僅加劇綜采設(shè)備運(yùn)行所需的能耗,同時(shí)當(dāng)偏差程度過大時(shí),會(huì)存在鏈條卡死、斷裂的風(fēng)險(xiǎn)[1-3]。故保證刮板機(jī)直線度對(duì)于工作面安全、高效作業(yè)有著積極作用。
按偏差的比例(P)、積分(I)和微分(D)進(jìn)行控制的PID(Proportion Integration Differentiation)控制器是一種自動(dòng)控制器,其在礦業(yè)工程、電子科學(xué)、農(nóng)業(yè)工程等領(lǐng)域有著廣泛的應(yīng)用[4-6]。Ines等將PID控制方法應(yīng)用于旋回破碎機(jī)的給料率、轉(zhuǎn)速,最終對(duì)兩者進(jìn)行了精確控制,實(shí)現(xiàn)了高效低耗的破礦目標(biāo)[7]。Ki?ran等通過EDEM發(fā)現(xiàn)磨機(jī)給料率與生產(chǎn)率為非線性關(guān)系,利用Caps GNN建立磨機(jī)的數(shù)學(xué)模型,對(duì)其磨機(jī)的生產(chǎn)率進(jìn)行預(yù)測,通過模糊PID算法對(duì)不同工況條件下磨機(jī)給料率進(jìn)行了調(diào)節(jié)[8]。Anastasia等將Fluent與PID算法融合,分析了不同濕度情況下破礦時(shí)礦物的破碎鍵數(shù)目變化情況,從而對(duì)破碎機(jī)的轉(zhuǎn)速進(jìn)行實(shí)時(shí)調(diào)整[9]。本研究通過建立模糊PID模型。將中部槽連接耳處空隙誤差與各段礦用刮板輸送機(jī)之間通過啞鈴銷連接的誤差結(jié)合,由數(shù)學(xué)模型計(jì)算出各液壓支架對(duì)刮板機(jī)進(jìn)行推溜所需要的流量,通過模糊算法對(duì)PID的輸出進(jìn)行融合計(jì)算,以期實(shí)現(xiàn)模糊PID模型對(duì)液壓缸工作時(shí)間的控制,達(dá)到礦用刮板輸送機(jī)調(diào)直的效果,為綜采面的全面自動(dòng)化提供前期研究,并降低因刮板機(jī)直線度偏差過大造成的事故率。
1 礦用刮板輸送機(jī)姿態(tài)計(jì)算
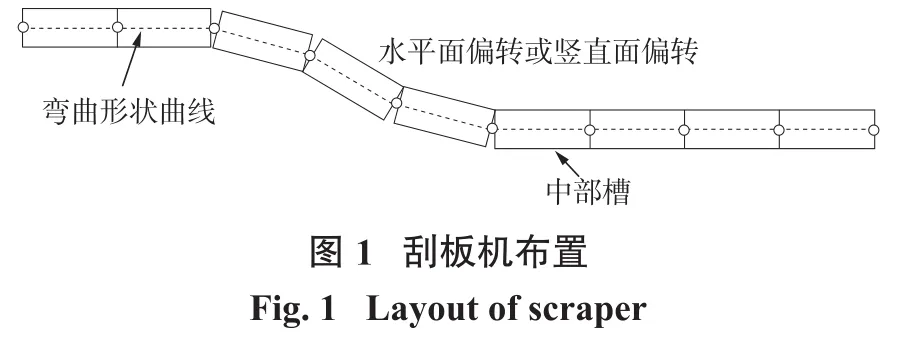
本研究提出將每段礦用刮板輸送機(jī)刮板的正中間位置按照采礦機(jī)械行走方向進(jìn)行連接,用來表征其彎曲程度,見圖1。
由于采礦機(jī)械的運(yùn)動(dòng)軌跡與刮板機(jī)的布置相互重合[10],因此需要將所采集到的采礦機(jī)械三維坐標(biāo)解析到絕對(duì)坐標(biāo)系下,刮板機(jī)在x、y、z方向下的轉(zhuǎn)動(dòng)角度分別記為α、β、γ,其歸總為角度總變化λ=[λ1,λ2,λ3]T。則當(dāng)前時(shí)刻n的λ與其之間的關(guān)系為
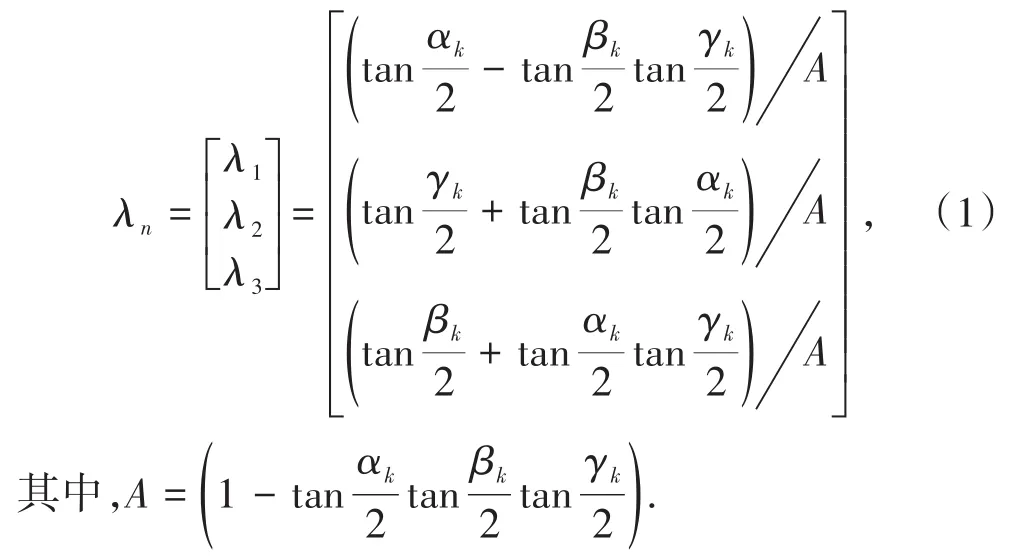
上式結(jié)合Rodrigues算法實(shí)時(shí)對(duì)礦用刮板輸送機(jī)當(dāng)前布置角度開展解析計(jì)算[11-13]。
推桿在對(duì)礦用刮板輸送機(jī)產(chǎn)生推動(dòng)時(shí),由于其作用在輸送機(jī)中部槽,以及相鄰刮板機(jī)之間通過啞鈴銷連接[14-17]。在推移的過程中,相對(duì)于礦用刮板輸送機(jī)中部點(diǎn)S,礦用刮板輸送機(jī)運(yùn)行方向(T)與豎直方向的角度偏差(Z)可表達(dá)為
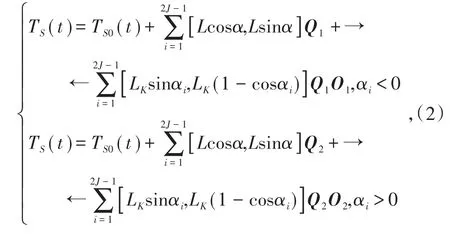
式中,J表示為當(dāng)前作用的刮板機(jī)總節(jié)數(shù);L為單位刮板機(jī)長度LK礦用刮板輸送機(jī)運(yùn)行方向的偏離程度;SK為刮板機(jī)豎直方向偏離程度;α為x方向下的轉(zhuǎn)動(dòng)角,β為y方向下的轉(zhuǎn)動(dòng)角,αi為x方向下的轉(zhuǎn)動(dòng)角的相對(duì)偏差,βi為y方向下的轉(zhuǎn)動(dòng)角的相對(duì)偏差。
造成刮板機(jī)在液壓支架作用下產(chǎn)生直線偏差的原因主要為連接耳處空隙造成的誤差,以及各段礦用刮板輸送機(jī)之間通過啞鈴銷連接產(chǎn)生的誤差,對(duì)單一段刮板機(jī)進(jìn)行推溜會(huì)造成其他段刮板機(jī)的連鎖運(yùn)動(dòng)。
2 模糊PID算法對(duì)刮板機(jī)的調(diào)直研究
從上文研究中得知液壓支架對(duì)中部槽位置施力,因此需要其所移動(dòng)的距離。由于刮板機(jī)在通常情況下需要調(diào)整到直線,則第n個(gè)連接耳可表達(dá)為

式中,INT[]為VFP數(shù)值函數(shù)的一種,是將一個(gè)要取整的實(shí)數(shù)(可以為數(shù)學(xué)表達(dá)式)向下取整為最接近的整數(shù);LD與L分別表示當(dāng)前段刮板機(jī)長度與總長度。
則刮板機(jī)在工作面前進(jìn)方向下的移動(dòng)量Ln可表示為

式中,ΔLn與分別表示移動(dòng)前后刮板機(jī)側(cè)板所在位置。
本研究所建立的模糊PID模型結(jié)果如圖2。以刮板機(jī)的水平偏差為基礎(chǔ),與中部槽連接耳處空隙誤差、各段礦用刮板輸送機(jī)之間通過啞鈴銷連接的誤差結(jié)合,通過補(bǔ)償計(jì)算,再結(jié)合相關(guān)數(shù)學(xué)模型計(jì)算出各液壓支架對(duì)刮板機(jī)進(jìn)行推溜所需要的流量L0,通過模糊算法對(duì)PID的比例調(diào)節(jié)系數(shù)kp0、積分調(diào)節(jié)系數(shù)ki0、微分調(diào)節(jié)系數(shù)kd0進(jìn)行計(jì)算,之后PID的輸出對(duì)液壓系統(tǒng)的供液量L1進(jìn)行控制,這部分流量即作為實(shí)際的流量作用于刮板機(jī)上,又作為這個(gè)控制系統(tǒng)的流量反饋值,得出流量誤差E、誤差變化率EC。
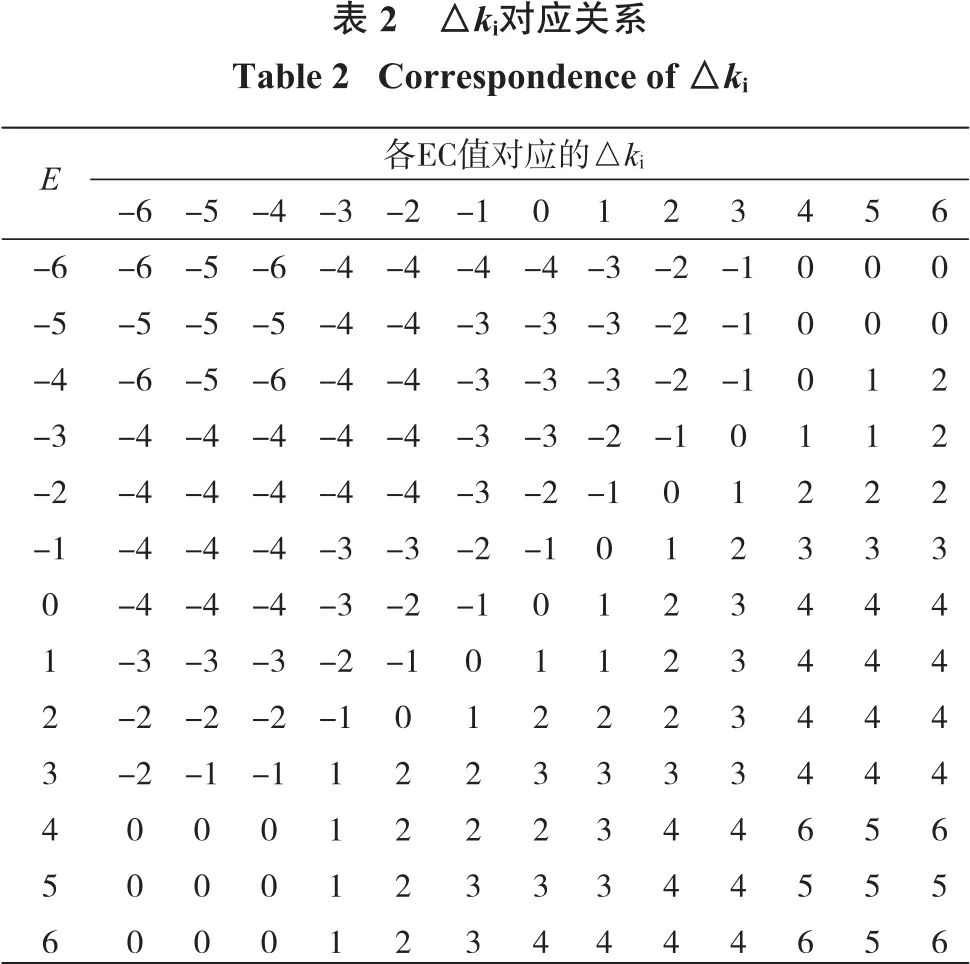
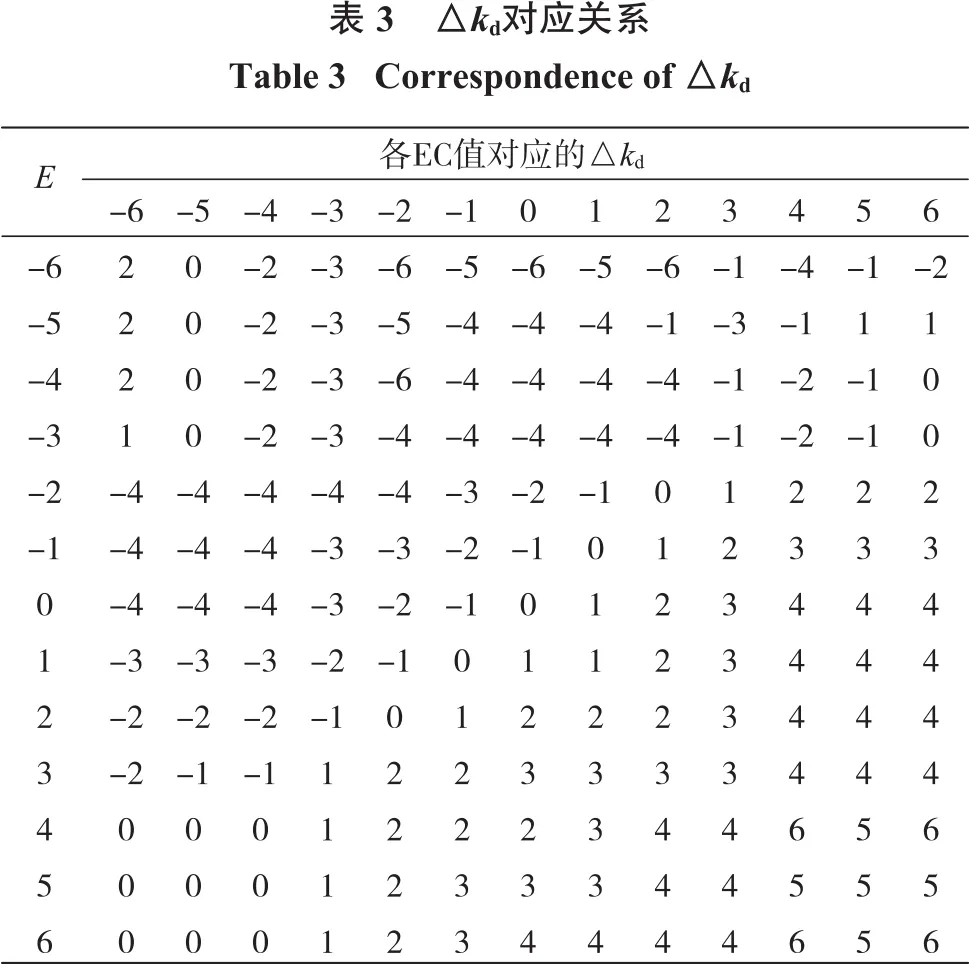
采用直接插標(biāo)法,設(shè)置控制器的輸入與輸出分別為{IB、IM、IS、ZE、OS、OM、OB},輸入的取值范圍分別如下,控制器參數(shù)的增量分別為Δkp:[-3,3];Δki:[-0.6,0.6];Δkd:[-3,3]。控制器誤差E:[-3,3]。控制器誤差變化率EC:[-12,12]。誤差量化因子λE=6÷ 3=2。誤差變化率量化因子λEC=6÷ 12=0.5。參數(shù)的增量的比例因子分別為λp=3÷6=0.5;λi=3 ÷ 6=0.5;λd=3 ÷ 6=0.5。
輸入E、EC以及各個(gè)輸出的增量Δkp、Δki、Δkd之間的關(guān)系如下(表1、表2、表3)。
通過上表確定 Δkp、Δki、Δkd的取值,并結(jié)合kp、ki、kd液壓支架對(duì)刮板機(jī)的作用時(shí)間。
在MATLAB 2018a平臺(tái)基礎(chǔ)上進(jìn)行仿真研究,仿真的思路如圖3。
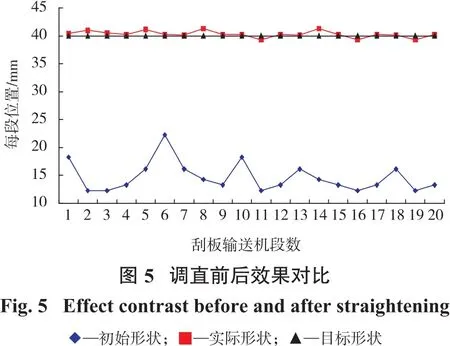
在MATLAB 2018a的仿真中設(shè)施刮板機(jī)總長度為20 m,每段長度為1 m,PID中kp=30、ki=19、kd=8[18-20],同時(shí)為直觀觀察調(diào)直結(jié)果在 LMS-Samtech 進(jìn)行仿真,最終獲得調(diào)直前后幾何仿真模型(截取部分)與折線圖(圖4、圖5)。
從圖5可以發(fā)現(xiàn),針對(duì)刮板機(jī)局部的調(diào)直效果較好,針對(duì)礦用刮板輸送機(jī)總體來說,當(dāng)其目標(biāo)位置均為40 mm,通過模糊PID可以較好地將刮板機(jī)調(diào)整到40 mm附近。
3 試驗(yàn)分析
通過Visual Studio對(duì)系統(tǒng)的顯示界面、操作界面、通信模塊進(jìn)行設(shè)計(jì),執(zhí)行部件通過PLC S7-200控制器進(jìn)行編程(圖6),實(shí)現(xiàn)數(shù)據(jù)的獲取、模糊PID的實(shí)現(xiàn)等功能。最終刮板機(jī)調(diào)直的效果如圖7(重復(fù)8次試驗(yàn))。每次試驗(yàn)與目標(biāo)形狀的平均偏差見表4。


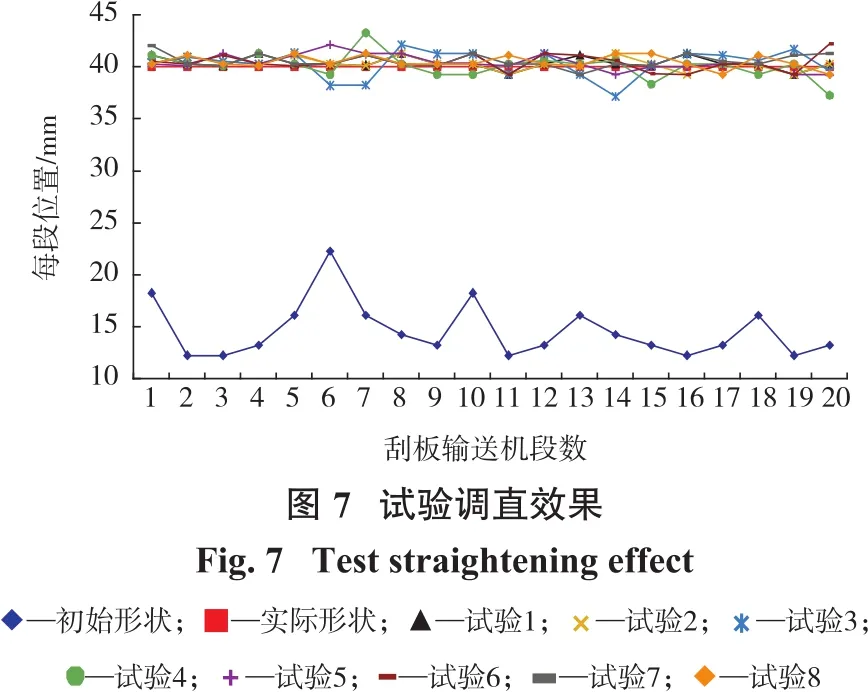
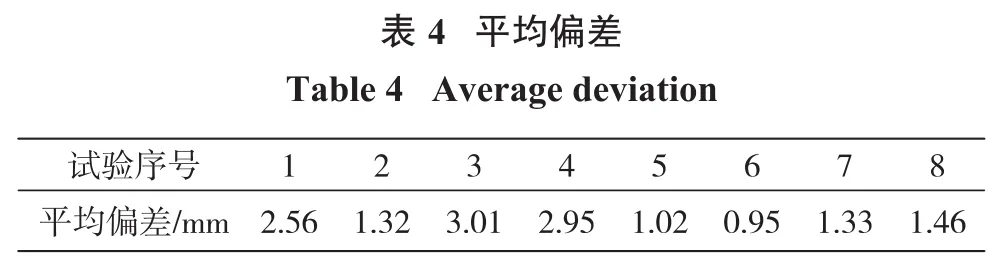
可以發(fā)現(xiàn),除了在試驗(yàn)3中的第14段,試驗(yàn)4中的第6段,8次試驗(yàn)中20段礦用刮板輸送機(jī)形狀均在目標(biāo)形狀附近浮動(dòng),且所有試驗(yàn)中的平均偏差均較小。因此,證明了本研究中的模糊PID算法較好地實(shí)現(xiàn)了礦用刮板輸送機(jī)的調(diào)直效果。
4 結(jié)論
(1)提出了礦用刮板輸送機(jī)姿態(tài)角度與形態(tài)解析算法。
(2)建立了模糊PID模型。將中部槽連接耳處空隙誤差與各段礦用刮板輸送機(jī)之間通過啞鈴銷連接的誤差結(jié)合,結(jié)合數(shù)學(xué)模型計(jì)算出各液壓支架對(duì)刮板機(jī)進(jìn)行推溜所需要的流量,通過模糊算法對(duì)PID的輸出進(jìn)行融合計(jì)算,最終通過模糊PID模型對(duì)液壓缸工作時(shí)間進(jìn)行調(diào)節(jié)。并通過MATLAB 2018a與LMSSamtech驗(yàn)證了調(diào)直效果。
(3)由試驗(yàn)證明了本研究中的模糊PID算法以及研究過程較好地實(shí)現(xiàn)了礦用刮板輸送機(jī)的調(diào)直效果。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
數(shù)學(xué)小靈通(1-2年級(jí))(2021年3期)2021-04-13 01:01:58
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
數(shù)學(xué)小靈通·3-4年級(jí)(2017年11期)2017-11-29 01:35:50