基于RobotStudio 的帶導軌工業機器人軌跡編程方法
2020-09-24 03:24:50馬少龍劉曉營
科技視界 2020年26期
梁 舒 馬少龍 劉曉營
0 前言
帶導軌的工業機器人系統一般應用在焊接、噴涂等領域,導軌可以增加工業機器人的工作范圍,進而提高工作效率。離線編程是一種對機器人程序進行編程調試的技術,使用計算機仿真軟件對機器人程序進行虛擬仿真,具有可視化的工作界面,可以在工業機器人工作站系統搭建的同時進行工業機器人程序的編程調試,并且有自動調試工具的輔助,可以方便地對工業機器人應用系統的工作流程進行驗證。本文通過對導軌和機器人在仿真軟件中進行聯合調試,介紹了帶導軌工業機器人軌跡編程的通用方法,該方法可進一步推廣到相關的離線編程調試中,提高編程效率。
1 創建帶導軌的工業機器人系統
使用離線編程技術對工業機器人工作站進行虛擬仿真,首先需要搭建工業機器人虛擬仿真工作站。工業機器人工作站主要由ABB 工業機器人IRB 4600、導軌IRBT 4004及焊槍工具組成。導入導軌后,將機器人安裝到導軌上,系統會自動將導軌與機器人進行同步,編程時將導軌作為機器人外軸進行處理,即可保證機器人和導軌的協調運行。驗證軌跡編程的方法還需要建立待加工工件,本次實驗在導軌兩側分別建立圓柱體和長方體的模型,計劃將機器人焊槍工具的TCP 沿著模型的上邊緣運動,完成軌跡編程的調試。機器人工作站的整體布局如圖1 所示。
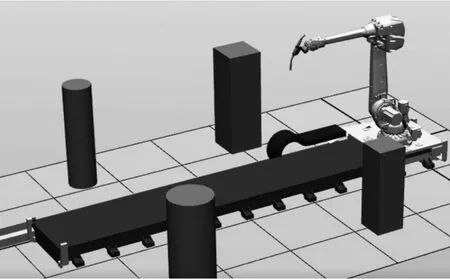
圖1 工業機器人工作站整體布局圖
2 帶導軌的工業機器人系統的示教編程
機器人在工作過程中需要在導軌上移動,就產生了多個工作位置,在編程調試機器人工作路徑前,需要先調試好機器人能否順利移動到工作位置。首先在機器人的原點位置示教目標點并重命名為pHome,作為機器人的初始位置。然后將機器人1軸旋轉90°,面向第一個工作位置,示教目標點作為過渡點,再拖動導軌,將機器人移動到第一個工作位置,示教目標點作為第一個工作等待位置。隨后使用MoveJ 關節移動指令,將目標點添加到新路徑中,并驗證轉移動作能夠順利完成。
在機器人到達第一個工作位置后,首先對工作路徑進行示教編程。使用MoveL 線性移動指令,依次對長方體的四個角點進行示教,然后通過復制回到工作等待位置的指令,使機器人在完成工作軌跡后回到等待位置,準備向下一個工作位置移動。拖動導軌,將機器人移動到第二個工作位置,使用MoveJ 關節移動指令進行示教。第二個工作軌跡是一個圓形,通過示教線性移動指令,再將圓弧的過渡點和終點轉換為MoveC 圓弧移動指令,即可生成圓弧軌跡。圓形路徑調試完成后,添加機器人回到第二個工作等待位置的指令。
所有工作路徑調試完成后,添加回到原點的指令,并對整體工作站系統進行仿真運行。使用基本選項卡的同步功能,將工作站對象中的路徑等參數與工業機器人虛擬控制器的RAPID 代碼匹配,在工業機器人虛擬控制器中生成相關的RAPID 程序。在仿真選項卡的仿真設定菜單選擇需要進行仿真的控制器和控制器所控制的機器人,選擇單周期運行,將子路徑作為程序指針的進入點,使機器人從子程序的第一行開始運行。在虛擬仿真工作站視圖界面,觀察機器人仿真運行的狀態。
3 帶導軌的工業機器人系統的軌跡編程
示教編程完成后,對導軌另一側的待加工工件用自動路徑的功能生成機器人工作路徑。建立空路徑并重命名為main,作為工業機器人的主程序,并在主程序中提前示教機器人到達第三個工作位置的指令。機器人工作路徑使用軟件的自動路徑功能,生成子路徑后,插入到主程序中。機器人通過導軌在工作位置間移動,仍然使用在主程序中示教關節運動指令的方式。
機器人到達工作位置之后,捕捉待加工工件的上表面邊緣,自動生成機器人工作子路徑。子路徑生成后,目標點所對應的工具坐標方向是隨機的,在機器人TCP 點沿著軌跡運行時,工具方向也在隨時產生變化,工具姿態的變化也會進一步影響工具的加工對象,而且容易損壞連接工具的焊絲和電纜等部件。需要進一步調整所有工具的姿態,使得工業機器人在運行過程中保證工具姿態的穩定,在虛擬仿真軟件里,需要找到一個工具方向合適的目標點,并將其他目標點的方向統一修改為此標準目標點的方向。修改完成后,需要為每一段子路徑進行軸參數進行自動配置并選擇沿著路徑運動,保證在此種工具姿態下,機器人對每一個目標點的可達性以及所有路徑運動的可行性。
所有工作子路徑和過渡動作調試完成后,添加回到原點的指令,并對整體工作站系統進行仿真運行。在仿真選項卡中將主程序main 作為程序指針的進入點,使機器人從主程序的第一行開始運行。在虛擬仿真工作站視圖界面,觀察機器人仿真運行的狀態。
4 結語
綜上所述,通過上述實驗,介紹了帶導軌工業機器人軌跡編程的兩種常用方法。其中示教編程適用于加工路徑簡單,以直線為主,目標點較少的情況,編程簡單便捷。捕捉軌跡編程適用于加工路徑復雜,曲線路徑多,目標點多的情況,使用自動路徑命令,捕捉的曲線可以自動生成機器人的工作路徑,節省了大量對目標點示教的時間。在聯合實際設備進行調試時,只需要現場示教幾個關鍵點,機器人就可以按照虛擬仿真中的路徑進行工作。基于RobotStudio 軟件的帶導軌工業機器人離線編程方法可以應用在多種工業應用中,對提前驗證工業機器人應用系統的工作流程、提高工業機器人的編程效率都有很大的實際意義。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電子制作(2018年12期)2018-08-01 00:47:44
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
電信科學(2016年10期)2016-11-23 05:11:56
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
