光電穩瞄系統前向運動及地理掃描
2020-09-28 05:33:56任元斌王惠林謝娜劉棟韓瑞
兵工學報 2020年8期
任元斌,王惠林,謝娜,劉棟,韓瑞
(西安應用光學研究所, 陜西 西安 710065)
0 引言
光電穩瞄系統[1-3]是飛機對地觀測成像的核心裝備,它通常固連在載機下方,在載機飛行過程中,執行監視、搜索、測繪等任務,可為用戶提供晝夜全天候高分辨率圖像。
近年來,由于航空和電子技術的飛速發展,超高空長航時飛行平臺逐漸興起,傳統的單一視場小范圍監視已經不能滿足迅速發現目標的需求。飛機在高空對目標區域使用高分辨率大范圍地理掃描技術,能快速獲取目標區域附近全面的高清圖像信息。
光電穩瞄系統在執行對地觀察成像任務時,無論是處于凝視還是地理掃描模式,都需要結合飛機的速度和姿態等飛行狀態。根據飛行狀態采取適當的控制指令驅動光電系統的伺服機構,才能保證光電系統掃描時地面瞬時視場(GIFOV)序列在地理表面高效連結形成區域覆蓋或者預期軌跡。
研究廣域地理掃描技術,就需要分析飛機和光電系統伺服機構的運動、姿態和振動等狀態對地理表面成像的影響。這其中作用機理復雜,內部環節相互作用較多,若要逐一掛飛實驗驗證,成本高昂。在這種情況下,搭建地理掃描的全鏈路模型,是在實驗室分析掃描機理和各環節相互運動關系的一種低成本、高效率方法。
在地理掃描過程中,飛機前向運動是光電系統實現大面積連續成像的一個前提。傳統的地理搜索掃描,是在飛機處于低空定速、定高情況下,以光電系統對地固定傾角進行連續成像。而大范圍地理掃描,是在載機前向飛行過程中,光電系統的萬向架等伺服機構根據指令序列,連續運動進行成像。大范圍地理掃描的搜索效率更高,并可在超高空小視場情況下大范圍成像。由于大范圍掃描需結合飛機前向速度,故前向運動對光電系統成像的影響分析至關重要。
建立從光電系統內部到外部地理表面成像的全鏈路模型,可為光電系統地理掃描研究提供低成本高效率的研究平臺[4]。同時,從微分運動學角度分析飛機前向運動對光電系統成像的影響,對光電系統各伺服機構的運動控制具有一定指導意義。
1 基本坐標系及其轉換關系
1.1 基本坐標系
與光電穩瞄系統相關的坐標系[5-6]有地心地固(ECEF)坐標系,導航坐標系(ENU),機體(AC)坐標系,瞄準線(S)坐標系。
1.1.1 ECEF坐標系
以在WGS-84中定義的ECEF坐標系作為參考坐標系,其坐標原點OECEF在地球的幾何中心即圖1中橢球圓心位置T為目標點,φ為該目標點的大地緯度。該坐標系的XECEF軸過地球0°經度的赤道面,ZECEF軸通過地球極軸指向北極點,YECEF軸由右手定則決定方向。
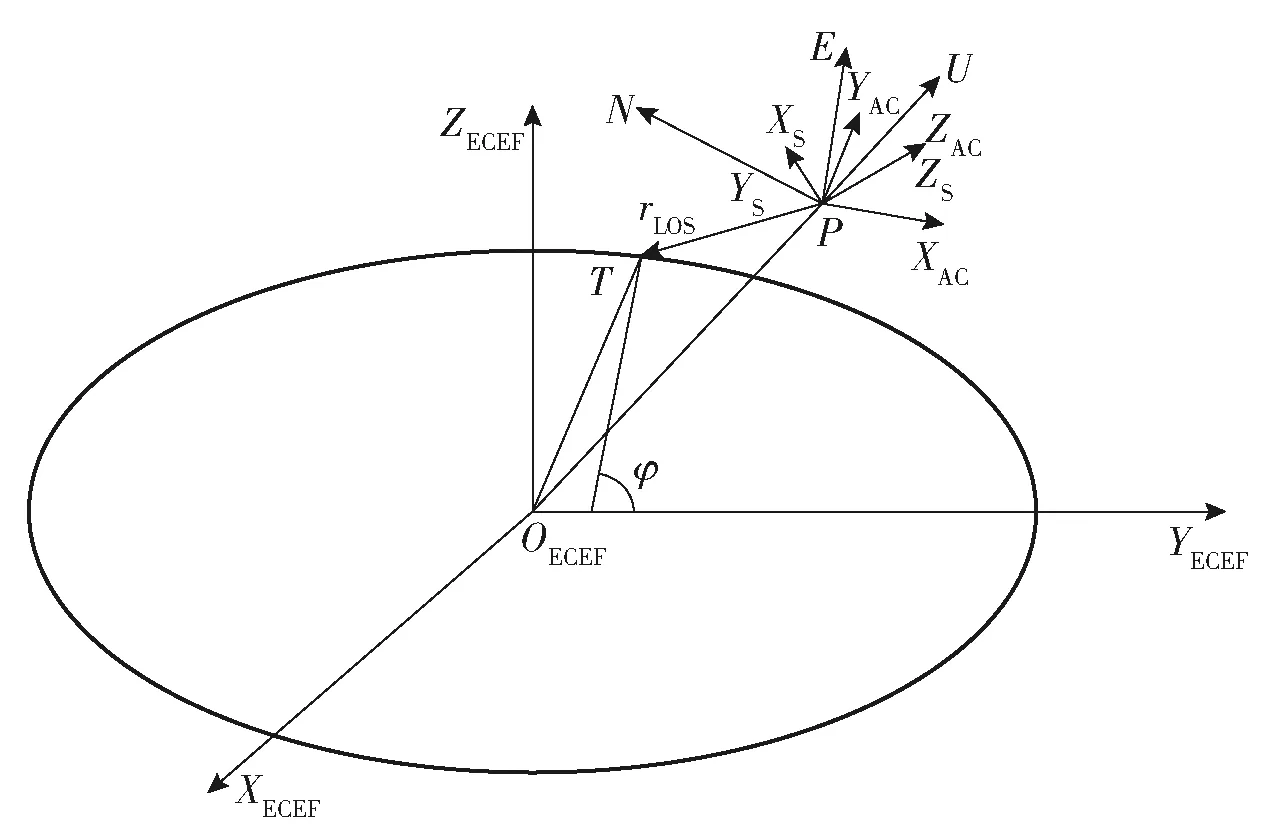
圖1 基本坐標系示意圖Fig.1 Fundamental coordinate system
1.1.2 ENU坐標系
坐標原點P在飛機慣性導航系統(INS)的幾何中心,XENU軸指向正東,在圖1中對應為E軸。YENU軸指向真北,在圖1中對應為N軸。ZENU軸沿著與大地平面垂直方向指天,在圖1中對應為U軸。
1.1.3 AC坐標系
該系的坐標原點在INS的幾何中心,如圖1中所示YAC軸方向沿著飛機機頭方向指向外部,ZAC軸沿著飛機底部指向機身頂部,XAC軸由右手定則確定,一般指向飛機的右翼。
1.1.4 S坐標系
該坐標系也稱為攝站坐標系,設定轉塔吊裝于飛機底部,該系原點在光電穩瞄系統的回轉中心,為簡化處理,這里將該回轉中心和INS的幾何中心設定在同一位置。YS軸方向為轉塔的瞄準線(LOS)方向,即圖1中rLOS指向方向。在初始零位位置時,該軸的方向一般平行于飛機機身的XAC軸(飛機橫滾軸)并指向機頭正前方。如圖1中S坐標系的XS軸為光電轉塔的俯仰軸,繞該旋轉軸逆時針旋轉為正向,ZS軸為光電轉塔的方位軸,指向飛機的頂部,平行于飛機的ZAC軸。
1.2 WGS-84下的橢球模型
在WGS-84體系[5-6]下地球模型是一個橢球體,其方程為
(1)
式中:XECEF,YECEF,ZECEF為ECEF坐標系下的地球橢球表面一點的地球固定坐標值;a為橢球模型的半長軸,其長度為6 378 137 m;b為橢球模型的半短軸,長度為6 356 752 m.
地球橢球表面的一個目標點位置可以用經度λ、緯度φ、高度h來指示,根據以下等式[5-6]可將地球表面一點的經度、緯度、高度坐標轉換為ECEF坐標系下的點坐標。
(2)
式中:XECEF、YECEF、ZECEF分別為該目標點在ECEF坐標系的XECEF,YECEF,ZECEF軸上的分量;e為橢球模型的離心率,
(3)
RN表示該位置沿卯酉圈的曲率半徑,
(4)
1.3 各個坐標系之間的關系
1.3.1 ECEF坐標系和ENU坐標系之間的轉換關系
以坐標系ECEF為參考坐標系逐步轉換到ENU坐標系,轉化過程[6-7]為

(5)
式中:Trans表示當前坐標系做平移變換;Rot表示以當前坐標系的坐標軸(YECEF,ZECEF)依次做旋轉變換。寫成矩陣形式如下:
(6)
由此,ECEF坐標系下點[XECEFYECEFZECEF1]T轉換到ENU坐標系的坐標為
(7)
1.3.2 ENU坐標系和AC坐標系之間的轉換關系
ENU到AC坐標系的轉換過程[6-7]如下:
(8)
式中:ψ為載機的航向角;θ為載機的俯仰角;γ為載機的橫滾角。則點坐標變換過程如下:
(9)
1.3.3 AC坐標系和S坐標系之間的轉換關系
坐標旋轉過程[6-7]如下:
(10)
式中:θa為光電系統的瞄準線方位角;θe為瞄準線俯仰角。有以下點坐標轉換過程
(11)
2 前向微分運動分析
載機搭載光電穩瞄系統在空中飛行時,其飛行速度相對于慣性系并不小,但若以地球為參考,其運動速度在ECEF坐標系下運動相對來說可以看作一個小幅微分運動,故本節采用微分運動的方法來分析光電系統在隨載機執行地面掃描任務時前向運動對光電成像所造成的影響。
以ECEF坐標系為參考坐標系,若初始時刻可由組合慣性導航獲得S坐標系的中心Q所在大地位置的經度λQ、緯度φQ、高度hQ,那么S坐標系的中心點在ECEF坐標系下面的位置矢量為rECEF,S,該矢量從地心指向S坐標系中心,其坐標為
(12)
式中:RN,Q表示該Q點位置沿卯酉圈的曲率半徑。
根據基本觀測三角,有關系式如下:
rECEF,T=rLOS+rECEF,S,
(13)
式中:rECEF,T表示地面目標點在ECEF坐標系下的位置矢量,該矢量從地心指向地面目標點;rLOS表示在ECEF坐標系下的瞄準線矢量。

(14)
aT=(a+hT),
(15)
(16)
式中:aT代表由目標高度值不同而更改的橢球模型的長半軸值;bT代表為其短半軸值;hT表示該目標處的海拔高度。
將rLOS向量寫成如下形式:
(17)

rLOS向量的模的值|rLOS|滿足如下二次方程[5]:
A|rLOS|2+B|rLOS|+C=0,
(18)
式中:
(19)
(20)
(21)
以上二次方程的解,可以用如下等式表達:
(22)
由于瞄準線向量與橢球模型有兩個交點,這里取模值較小的一個解。
至此,在計算出|rLOS|后根據基本觀測三角有
(23)

地面目標點T的經度可以根據如下算式確定:
(24)
地面目標點T的大地緯度可以根據如下算式確定:
(25)
若當前時刻下,S系歷經一個保持地理指向的在ECEF系下的微分運動dS,該運動過程表示為
(26)
dS可以表示為如下形式:

(27)
式中:dXECEF、dYECEF、dZECEF表示載機在三軸方向的微分平移速度,可由該時刻的組合慣性導航系統測量并計算得到;δXECEF、δYECEF、δZECEF表示載機在三軸方向的微分旋轉速度;I表示單位矩陣;ΔS表示微分算子。
忽略高階小量δXECEFδYECEF、δXECEFδZECEF、δYECEFδZECEF、δXECEFδYECEFδZECEF,則該微分運動的微分算子ΔS寫為
(28)
需做的旋轉量δXECEF、δYECEF、δZECEF可以由如下過程確定。

(29)
由于微分運動后仍滿足基本觀測三角,且rECEF,T保持不變有如下關系:
rECEF,T=rLOS,NEW+rECEF,S,NEW,
(30)

(31)
根據微分運動過程可知如下近似關系式:
(32)
旋轉角度為
(33)
根據羅德里格旋轉公式:

(34)

(35)

(36)
(37)


根據定義
(38)
故有
(39)

(40)
(41)
(42)

航空相機領域也有文獻[10-11]論述過飛機前向的成像影響,但基本都假定大地為平面,且多數僅考慮在機身正下方成像時的影響分析而沒有涵蓋側向遠距離傾斜成像時前向運動的影響分析,同時也沒有寫出前向運動所引起像旋量的表達式,此節在地球橢球模型下較為全面地分析了載機前向運動對成像的影響。
3 光電系統地理掃描全鏈路仿真模型
據相關文獻[5]顯示,TIER II plus光電系統在研發時使用了MASLAC模擬工具來驗證瞄準線穩定和地理掃描相關任務的動態性能。該工具采用仿真工具箱并用C++編寫DLL(動態鏈接庫),實時且高效,使用模擬工具進行設計驗證,節省了很多不必要的掛飛成本。搭建光電系統相關的仿真模型對光電系統的穩定和掃描研究很有必要。
3.1 光電穩瞄系統內部速度環路模型
速度環路[12]是穩瞄系統內部以速度為反饋信號的環路,是保證平臺穩定的核心環路。其構成部件有,測速反饋元件(陀螺或測速機),電機,負載,速度控制器等[13-15],這些部件的微分方程表達式,或頻率域的傳遞函數關系已經比較明確,且相關文獻研究較多,這里不再寫出其方程表達式。根據各環節的頻域傳遞函數以及電學參數所搭建的內框架速度環路模型如圖2所示。
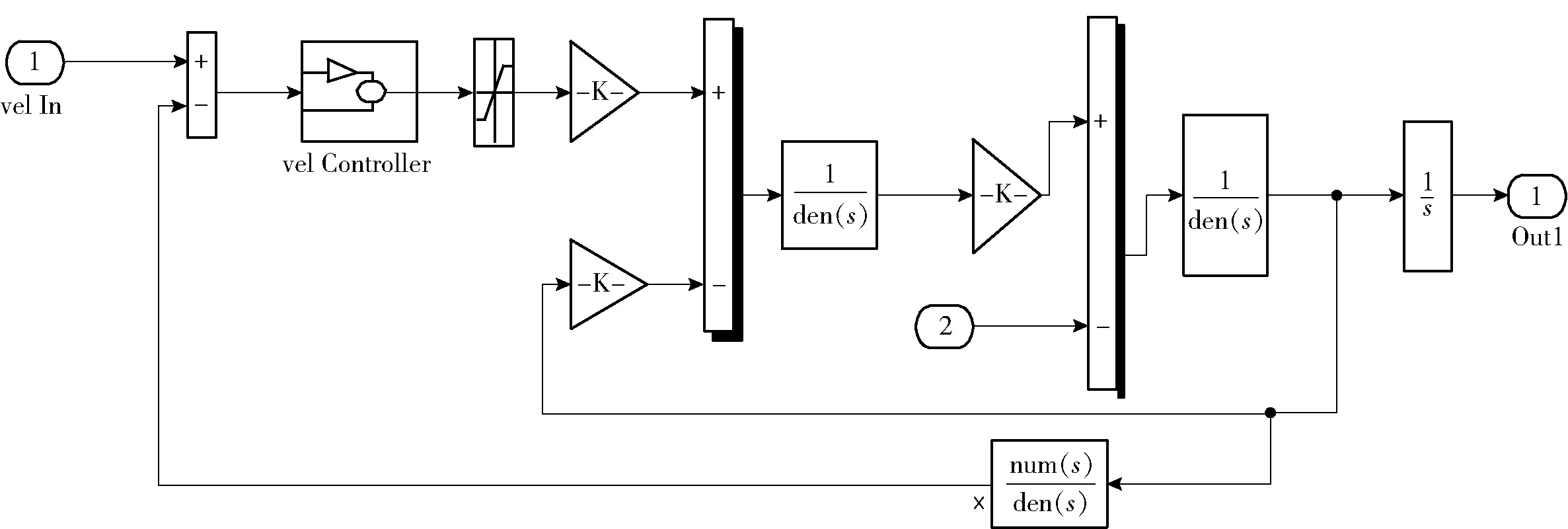
圖2 速度環路示意圖Fig.2 Schematic diagram of velocity loop
3.2 光電穩瞄系統兩軸四框架模型
兩軸四框架[1]模型是由內方位、內俯仰、外方位、外俯仰4個框架的模型組成。4個框架中每個框架都有自身的速度環路和位置環路,通過運動耦合和解耦等相互作用,共同決定瞄準線最終的指向。該模型具備慣性模式、掃描模式、位置模式等運動控制模式。根據各個框架的耦合關系以及電學相關參數搭建模型如圖3所示。
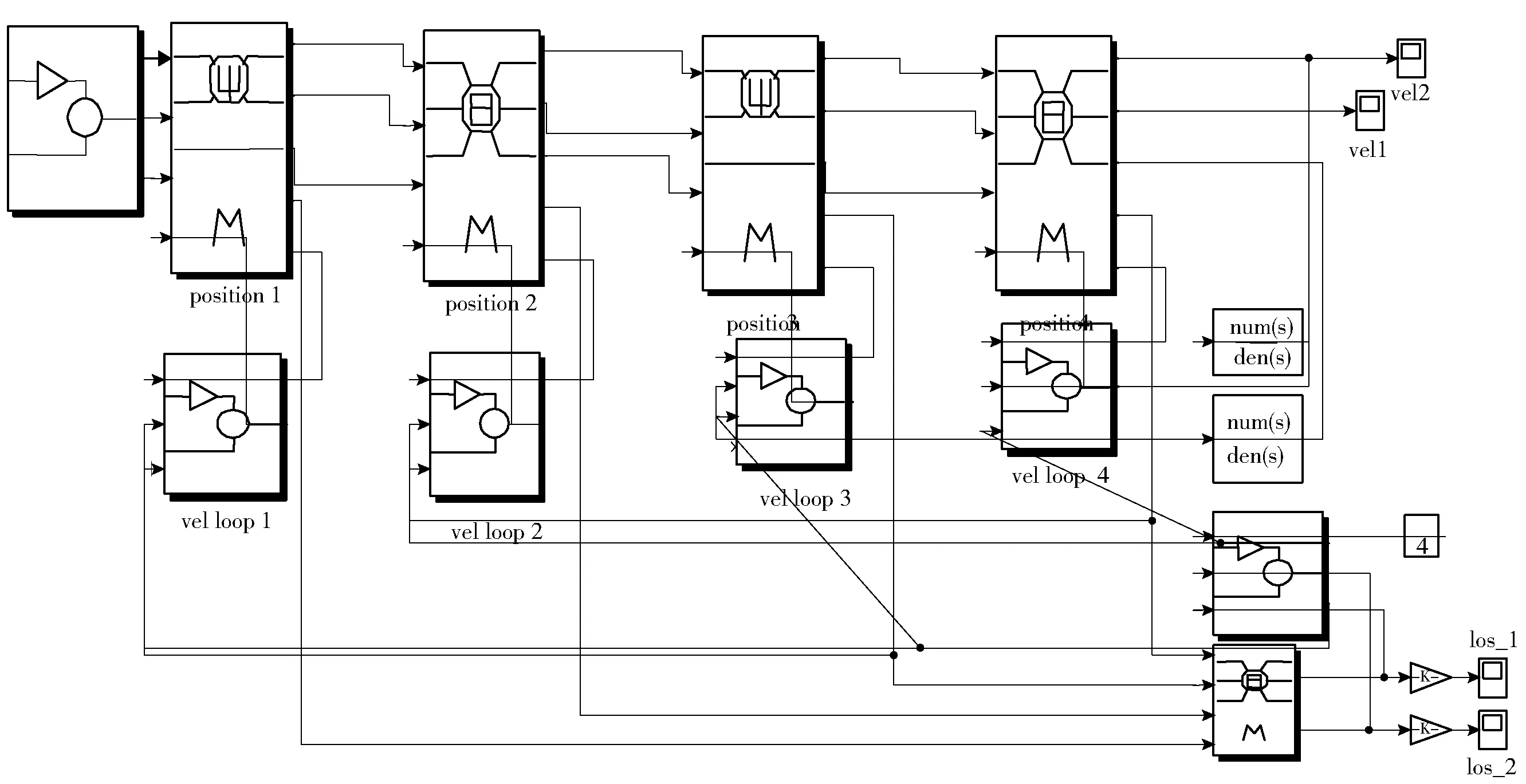
圖3 四框架組合示意圖Fig.3 Schematic diagram of four-gimbal combination
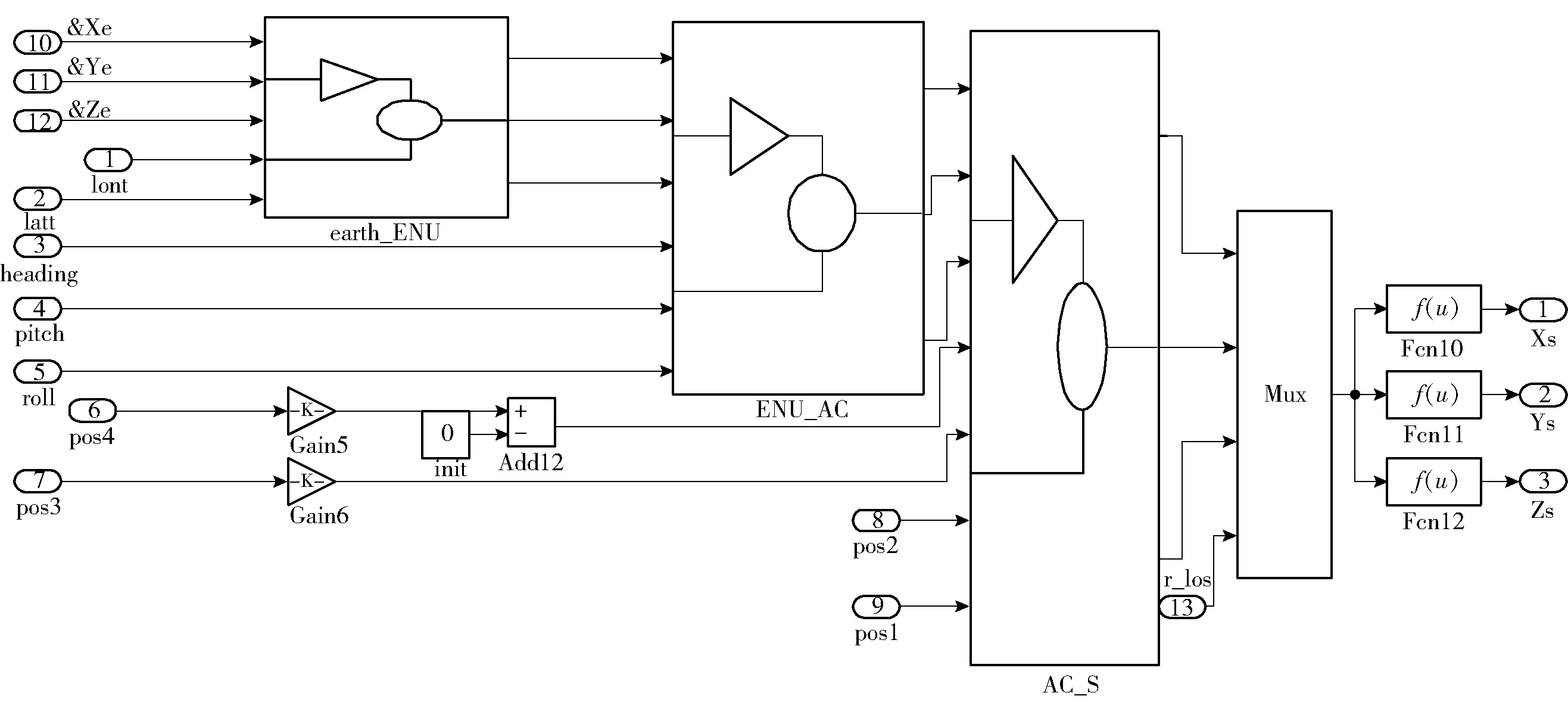
圖4 前向運動解析示意圖Fig.4 Forward motion analysis diagram

3.3 前向運動解析模型
根據第2節的論述,需將載機的飛行速度,經度、緯度姿態等信息作為前向運動解析模型的輸入,并根據第2節的關系(28)式~(42)式搭建模型,所搭建的前向運動解析模型如圖4所示。
所搭建的模型結合載機姿態、經度、緯度以及在ECEF系下的載機三軸速度分量等信息,并且根據光電穩瞄系統的瞄準線方位角pos3,俯仰角pos4,計算得到當前時刻載機的前向運動對當前時刻瞄準線坐標系造成的成像影響。
3.4 瞄準線目標定位模型
模型接收載機當前組合INS的所給的經度、緯度,以及穩瞄系統瞄準線的當前方位俯仰角,通過第2節所給出的(12)式~(25)式搭建模型,最終計算出瞄準線指向地表目標位置的地理坐標[16-17]。所搭建的模型如圖5所示。
圖5模型中,u1_ef、u2_ef、u3_ef分別為瞄準線單位向量在ECEF坐標系中的3個分量,R_los為當前時刻瞄準線向量的長度值。通過(24)式、(25)式計算可得當前瞄準線所指向目標點的經度、緯度坐標。
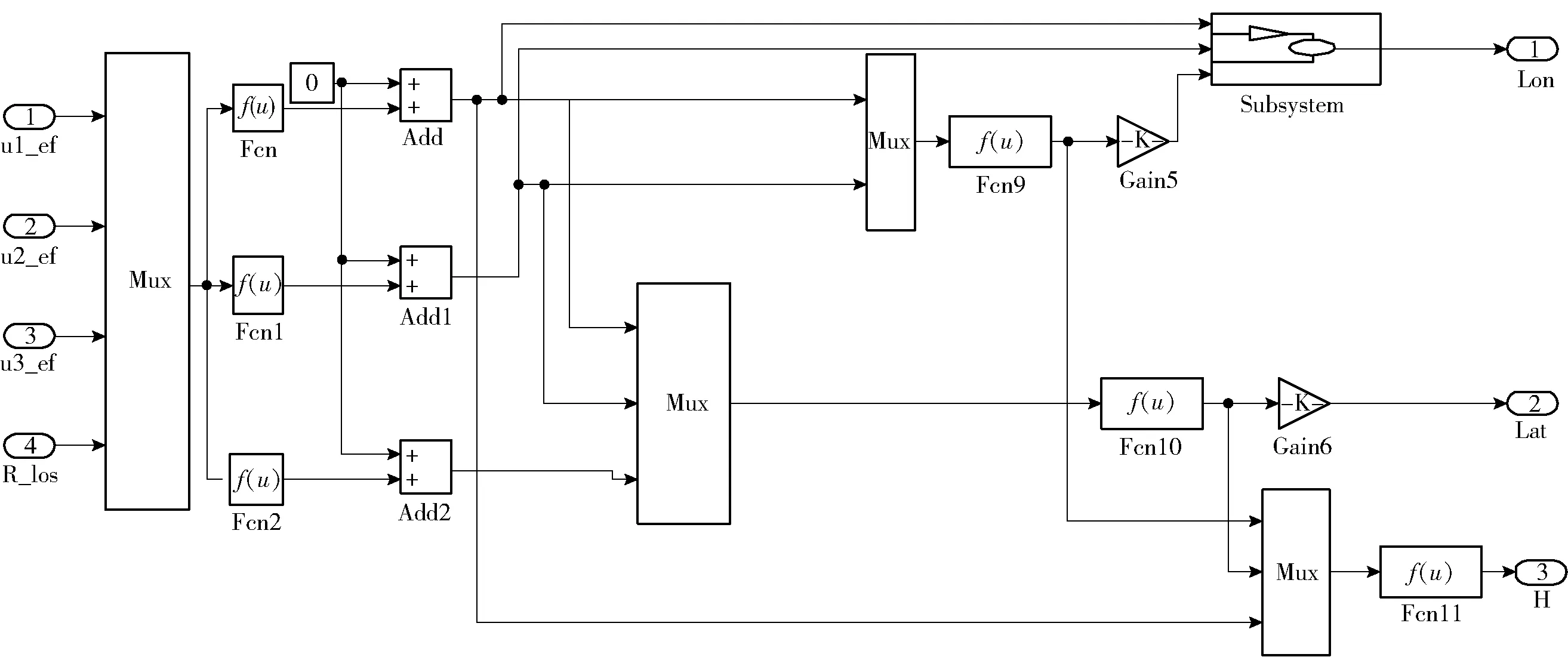
圖5 目標定位示意圖Fig.5 Schematic diagram of target localization
3.5 各模型之間的關系
3.1節~3.4節4個模型通過數據交互,共同組成光電系統地理掃描全鏈路模型[18]。
速度環路模型和四框架模型數據交互關系為:4個速度環路模型為四框架模型的重要組成部分。為驅動穩瞄系統,在各速度環路加入速度指令數據,進而4個框架在該指令下致動,產生角位移數據。通過對各個框架輸出的速度命令進行積分得到角位移數據,并與各框架起始角位置相加,得到四框架模型中各個框架的最終角位置數據值。四框架模型根據各框架所在最終角位置數據值,計算光電穩瞄系統的當前瞄準線指向。
前向運動模型和四框架模型數據交互關系為:前向運動模型接收外部載機的組合慣性導航數據,并將載機的前向運動對瞄準線坐標系各軸的影響計算出來,要克服其影響需將前向模型輸出的角速度數據值XS、YS、ZS傳遞到四框架模型的速度數據命令接收處,并和速度命令輸入數據相加。
目標定位模型與前向運動和四框架模型數據交互關系為:目標定位模型接收前向運動模型傳遞的姿態數據、載機飛行速度等數據信息,同時獲取四框架模型的瞄準線方位俯仰角,最終計算得到當前穩瞄系統瞄準線所指的目標位置的經度、緯度數據。
4 仿真參數實例與結果分析
折線型掃描是地理掃描中常見的掃描方式,它以給定目標點為起始點,以折線方式向周邊外擴掃描。該掃描方式應用廣泛,故以該掃描方式檢驗前面第3節所做的模型和理論分析。
給模型各個環節賦予初始參數值如下:飛機初始時刻位置經度為107.986°,緯度為34°. 假定飛機機頭向東,懸停于空中,東向、北向、天向速度都為0 km/h. 光電穩瞄系統包含內環方位、俯仰和外環方位、俯仰共4個速度環路,以及內外環4個位置環路等,是多輸入、多輸出的耦合系統,其模型和環路中各環節的傳遞函數如第3節圖2和圖3描述。穩瞄系統初始方位角為270°,俯仰角起始位置為-45°,以0.6°/s的恒定角速率驅動速度環路,進而驅動整個穩瞄系統,并在一定時刻切換掃描方向使瞄線進行折返掃描,運行全模型后掃描結果示意圖如圖6所示。
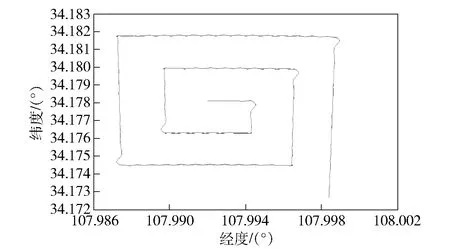
圖6 飛機懸停下地理掃描Fig.6 Geographical scanning during hovering
由圖6可以看出:光電系統沿著飛機的側翼傾斜向機身一側的遠處斜下方成像,由于系統控制特性和內部噪聲等原因,所得在地表的掃描軌跡有起伏,不是嚴格的直線。上位機給定光電的地理目標點經度、緯度位置,通常不是完全準確,但真實位置往往就在給定點的附近周邊區域,故用該折線掃描方法,可迅速找到目標真實位置。
在光電系統實際執行任務時,飛機一般不會懸停空中來配合光電執行掃描,而是有一定前向飛行速度。故設定飛機飛行前進方向為正東,巡航速度為180 km/h,北向、天向飛行速度為0 km/s. 前向巡航時地理掃描結果示意圖如圖7所示。
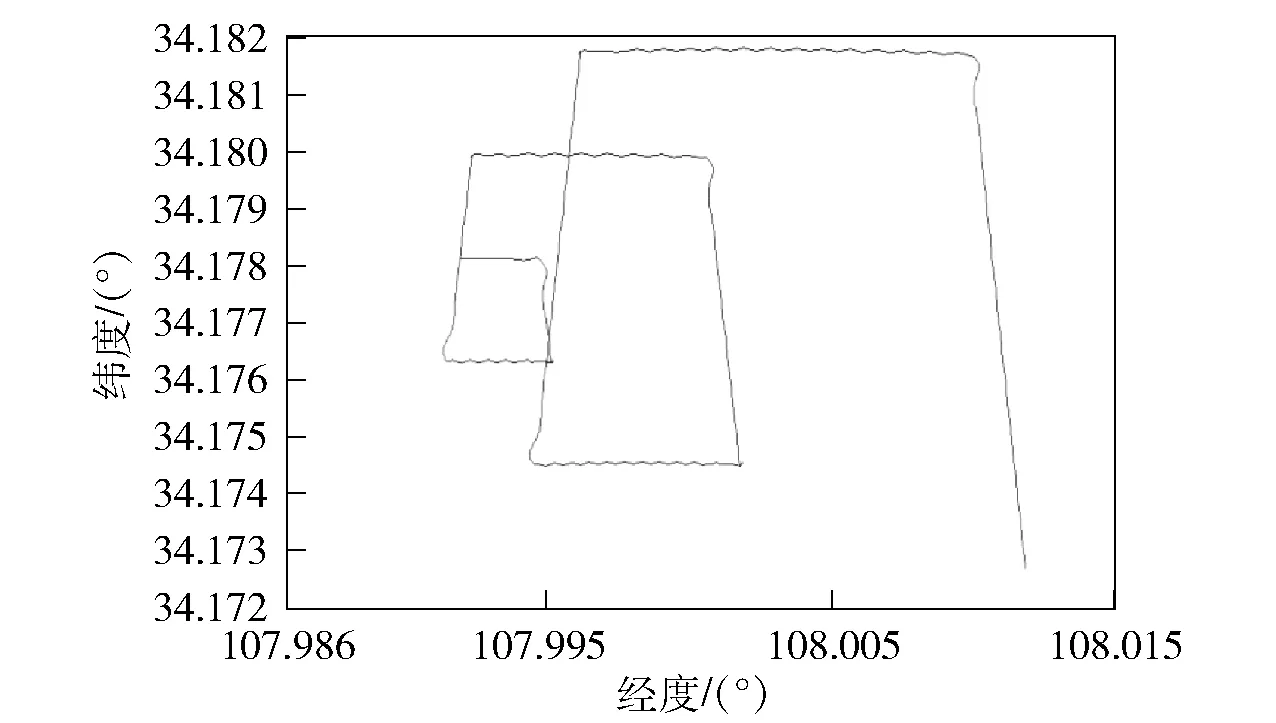
圖7 前向巡航時地理掃描示意圖Fig.7 Geographical scanning during cruising
由圖7可以看出:由于飛機的前向運動,瞄準線也被帶動往東向運動,折線型掃描的軌跡嚴重變形,偏離了所給初始坐標附近。因此,不消減飛機前向影響,使用折線型掃描很難發現真實目標位置。
現用第3.3節所搭建的前向運動解析模型,計算出欲克服載機前向運動影響,光電系統的各框架所需運動角速度值,并傳遞到各個框架中,以消減飛機前向運動的影響。消減前向影響后地理掃描結果示意圖如圖8所示。
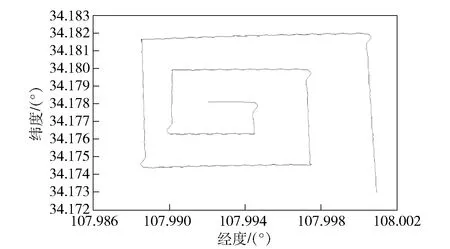
圖8 消減前向影響后地理掃描示意圖Fig.8 Geographical scanning diagram after removing forward impact
由圖8可以看出:經消減前向運動的影響,瞬時視場在地表連結形成折線型條帶,有利于在給定坐標周圍找到目標真實位置。
5 結論
本文歸納了光電穩瞄系統常用坐標系之間的齊次變換關系,并從微分運動的角度,分析了載機前向運動對兩軸四框架穩瞄系統成像所產生的影響,給出了該影響的計算方法。搭建了地理掃描的全鏈路仿真模型,并使用該仿真模型模擬光電穩瞄系統在空中對地定位和掃描的過程。根據前向運動影響計算方法,在仿真環境加入補償量可消除一定程度前向運動的成像影響。仿真結果表明,該全鏈路模型可以用于地理掃描相關研究中,前向運動的理論分析正確且有效。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
當代陜西(2019年11期)2019-06-24 03:40:28
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33