基于模糊控制策略的快速反射鏡伺服控制
2020-09-28 05:33:58高歆楊柯芳鄒偉余瀟袁佳
兵工學(xué)報(bào) 2020年8期
高歆楊,柯芳,鄒偉,余瀟,袁佳
(西南技術(shù)物理研究所, 四川 成都 610041)
0 引言
快速控制反射鏡(FSM)簡(jiǎn)稱快反鏡,是一種可以快速、精確地調(diào)整光束方向的伺服控制裝置。快反鏡具有響應(yīng)速度快、控制帶寬高、抗干擾能力強(qiáng)等優(yōu)良特性,被廣泛地應(yīng)用于天文望遠(yuǎn)鏡、激光通信、圖像穩(wěn)定光學(xué)系統(tǒng)、自適應(yīng)光學(xué)系統(tǒng)、光電跟蹤瞄準(zhǔn)系統(tǒng)等領(lǐng)域[1-5]。快反鏡通常與大轉(zhuǎn)角的跟蹤架一起構(gòu)成復(fù)合軸系統(tǒng),由跟蹤架主系統(tǒng)完成大范圍的粗跟蹤,快反鏡子系統(tǒng)保證跟蹤精度的實(shí)現(xiàn)。作為跟瞄回路中的關(guān)鍵環(huán)節(jié),快反鏡需要具備更快的響應(yīng)速度和更高的精度才能滿足系統(tǒng)日益增長(zhǎng)的需求,而優(yōu)良的伺服性能是實(shí)現(xiàn)高精度快速跟蹤的前提條件,因此設(shè)計(jì)出可靠且易于工程實(shí)現(xiàn)的控制算法來提升快反鏡伺服性能,從而保證復(fù)合軸系統(tǒng)達(dá)到需求的跟蹤精度具有迫切的現(xiàn)實(shí)意義[6-9]。
文獻(xiàn)[10]采用改進(jìn)根軌跡設(shè)計(jì)PID參量,保證了系統(tǒng)動(dòng)態(tài)性能同時(shí)還改善了快速反射鏡結(jié)構(gòu)的機(jī)械諧振問題,但是需要知曉系統(tǒng)模型精確的數(shù)學(xué)表達(dá)式,所以泛用性不高;文獻(xiàn)[11]采用自適應(yīng)算法,彌補(bǔ)了傳統(tǒng)PID不能根據(jù)實(shí)際情況在線整定控制器參數(shù)的不足,提高了跟蹤精度與穩(wěn)定性,但是其計(jì)算原理復(fù)雜,很大程度上依賴Lyapunov函數(shù)的選取;文獻(xiàn)[12]采用改進(jìn)自抗擾的方法,在原有自抗擾算法的基礎(chǔ)上減小了響應(yīng)時(shí)間,提升了跟蹤精度,但是其只驗(yàn)證了低頻信號(hào)下的跟蹤精度,缺乏實(shí)現(xiàn)工程化的理論保障。
模糊控制作為智能控制的一個(gè)分支,是控制理論及控制工程目前研究的一個(gè)重要方向。模糊控制器通過綜合利用領(lǐng)域?qū)<业目刂平?jīng)驗(yàn)來應(yīng)對(duì)實(shí)際工況的變化,可以在不依賴被控對(duì)象精確的模型參數(shù)情況下自適應(yīng)整定控制參數(shù),因此相比傳統(tǒng)PID控制器,既能顯著改善控制品質(zhì),又具有較好的魯棒性。模糊控制方法不僅得到仿真實(shí)驗(yàn)驗(yàn)證,而且已經(jīng)成功應(yīng)用于多種對(duì)象的實(shí)際控制系統(tǒng)中[13],如文獻(xiàn)[14]將模糊控制算法應(yīng)用于汽車懸架系統(tǒng),解決了系統(tǒng)非線性以及不確定性等問題,很好地抑制了隨機(jī)輸入信號(hào)下的誤差干擾。因此,本文針對(duì)復(fù)合軸跟蹤的應(yīng)用背景,提出將模糊控制算法應(yīng)用于快反鏡伺服控制系統(tǒng),提高快反鏡的抑制帶寬,達(dá)到更加有效抑制主軸殘差的目的。
本文擬從系統(tǒng)設(shè)計(jì)層面探索高性能快反鏡的控制方法,提出一種將模糊控制策略與PID結(jié)構(gòu)相結(jié)合的模糊控制器,既繼承PID便于工程實(shí)現(xiàn)的優(yōu)點(diǎn),又可克服控制參數(shù)無法自適應(yīng)整定的不足,賦予PID方法一定的智能性,從而更好地適應(yīng)不同的運(yùn)行工況,達(dá)到全面提升現(xiàn)有快反鏡控制性能的目的。以基于高頻搖擺電機(jī)的快反鏡為應(yīng)用對(duì)象設(shè)計(jì)了模糊控制器,對(duì)實(shí)際工況下快反鏡的伺服性能進(jìn)行了仿真研究,通過與傳統(tǒng)控制下伺服性能的對(duì)比,驗(yàn)證了本文提出的模糊控制器可以顯著改善快反鏡伺服性能,為進(jìn)一步提升復(fù)合軸跟蹤精度建立了基礎(chǔ)。
1 用于復(fù)合軸跟蹤的快反鏡控制結(jié)構(gòu)
一種用于復(fù)合軸跟蹤的快反鏡控制結(jié)構(gòu)是由光電跟蹤外環(huán)與位置伺服內(nèi)環(huán)(快反鏡伺服裝置)組成的雙環(huán)控制結(jié)構(gòu),外環(huán)與內(nèi)環(huán)的控制框圖分別如圖1和圖2所示,圖1中的虛線表示通過目標(biāo)空間的光路閉環(huán)。本文目的是解決伺服內(nèi)環(huán)的性能提升問題,為后續(xù)的外環(huán)控制系統(tǒng)研究奠定基礎(chǔ)。表征快反鏡伺服性能的主要指標(biāo)有:抑制帶寬、階躍響應(yīng)的超調(diào)及上升時(shí)間、隨機(jī)輸入響應(yīng)能力等。

圖1 快反鏡光電跟蹤外環(huán)控制框圖Fig.1 Block diagram of outer loop control of FSM electro-optic tracking
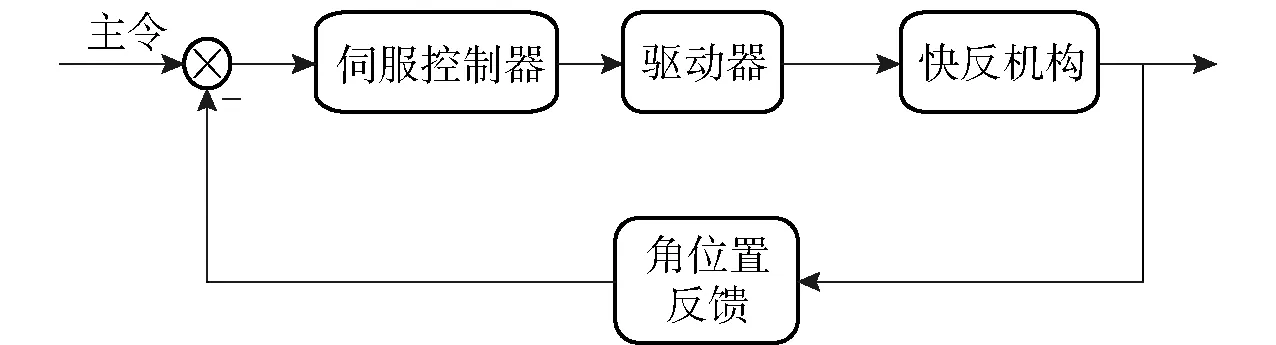
圖2 位置伺服內(nèi)環(huán)(快反鏡伺服裝置)控制框圖Fig.2 Control block diagram of position servo inner loop (FSM servo device )
目前,傳統(tǒng)PID控制由于技術(shù)成熟、實(shí)現(xiàn)簡(jiǎn)單可靠,而成為快反鏡控制系統(tǒng)最普遍的控制方式[15]。但是,隨著對(duì)控制品質(zhì)要求的提高,PID控制的缺點(diǎn)便顯現(xiàn)出來:一般只適用于線性系統(tǒng)、需知曉被控對(duì)象的模型參數(shù)才能獲得較為理想的PID參數(shù),若控制系統(tǒng)結(jié)構(gòu)特性隨時(shí)間變化則難取得較好控制效果[16],而且傳統(tǒng)PID其控制參數(shù)由人為事先計(jì)算確定,因而對(duì)于實(shí)際工況下輸入信號(hào)特性的隨機(jī)變化難于自適應(yīng)[17]、基于PID控制的回路抑制帶寬有限等。
2 模糊思維及其控制原理
模糊思維是針對(duì)所有思維對(duì)象進(jìn)行的非精確思維,而模糊控制便是基于這種思維并以模糊集合論、模糊語(yǔ)言變量以及模糊邏輯推理3個(gè)部分為基礎(chǔ)構(gòu)成的計(jì)算機(jī)控制[18]。整個(gè)模糊控制系統(tǒng)主要分為兩個(gè)部分,模糊控制器和被控對(duì)象。其中,模糊控制器為該系統(tǒng)的核心,由以下4個(gè)部分組成[19-21]:
2.1 模糊化
將輸入的精確量轉(zhuǎn)換成模糊化量。具體過程為:將精確的輸入量進(jìn)行尺度變換到各自的論域范圍,再對(duì)其進(jìn)行模糊處理轉(zhuǎn)化成模糊量。一般采用線性變換。
例如,實(shí)際輸入量xi的實(shí)際變化范圍為[amin,amax],而xi的模糊論域?yàn)閇bmin,bmax],則如(1)式所示。
(1)
2.2 知識(shí)庫(kù)
知識(shí)庫(kù)通常由提供處理模糊數(shù)據(jù)相關(guān)定義的數(shù)據(jù)庫(kù)以及由邏輯語(yǔ)言來描述控制目標(biāo)和策略的規(guī)則庫(kù)兩部分組成。知識(shí)庫(kù)包含被控對(duì)象應(yīng)用領(lǐng)域中的相關(guān)知識(shí),是領(lǐng)域?qū)<铱刂平?jīng)驗(yàn)的綜合反映,也是從實(shí)際控制經(jīng)驗(yàn)過渡到模糊控制器的關(guān)鍵環(huán)節(jié)。
2.3 模糊推理
模糊推理是整個(gè)模糊控制器的核心,它可以模仿人類做決定時(shí)的模糊概念,運(yùn)用模糊邏輯進(jìn)行推理,從而得到模糊控制量。該推理工作原理是基于模糊邏輯中的函數(shù)關(guān)系及相對(duì)應(yīng)的推理規(guī)則來進(jìn)行的。通常具有如下形式:
IF…(一組條件)…THEN…(得出結(jié)論)…。
2.4 去模糊化
去模糊化的作用是將由模糊推理環(huán)節(jié)得到的模糊控制量經(jīng)過適當(dāng)?shù)暮瘮?shù)關(guān)系變換為實(shí)際用于控制被控對(duì)象的清晰控制量。主要的去模糊方法有3種:1)最大隸屬度法;2)面積平均法;3)重心法。重心法取μC′(z)加權(quán)平均值為z的清晰值,如(2)式和圖3所示。
(2)
式中:μC′(z)為隸屬度函數(shù),C′為模糊集合,z為輸出量;zo為輸出量清晰值,它類似于重心的計(jì)算。

圖3 清晰化重心法Fig.3 Centroid method
3 快反鏡模糊控制器設(shè)計(jì)原理與步驟
3.1 概述
本文提出將模糊策略與傳統(tǒng)PID概念相結(jié)合設(shè)計(jì)一種適用于快反鏡伺服系統(tǒng)的模糊控制器,該模糊控制器依舊采用傳統(tǒng)PID的結(jié)構(gòu),但比例、積分、微分3個(gè)控制參數(shù)依據(jù)輸入偏差及偏差變化率實(shí)時(shí)調(diào)節(jié),而調(diào)節(jié)規(guī)則來自領(lǐng)域?qū)<业目刂平?jīng)驗(yàn),由模糊推理生產(chǎn)。具體設(shè)計(jì)步驟如下。
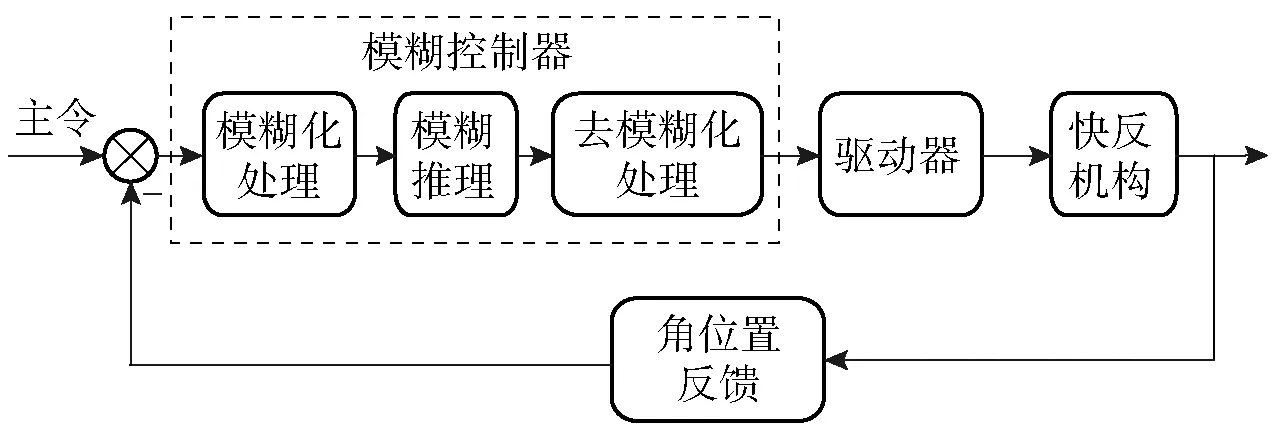
圖4 快反鏡模糊控制系統(tǒng)原理框圖Fig.4 Functional block diagram of FSM fuzzy control system
1)將領(lǐng)域?qū)<覍?duì)快反鏡的控制經(jīng)驗(yàn)總結(jié)出“規(guī)則”,并將規(guī)則逐條排列構(gòu)建知識(shí)庫(kù)。按照前文的設(shè)計(jì)流程,通過將控制偏差和偏差變化率按照負(fù)大、負(fù)中、負(fù)小、零位、正小、正中、正大7個(gè)分類級(jí)別進(jìn)行相應(yīng)的模糊化處理,并按照知識(shí)庫(kù)中的規(guī)則即模糊控制律進(jìn)行模糊推理,就可獲得需要的控制參數(shù),該參數(shù)的獲得過程是全自動(dòng)的,也就自適應(yīng)了對(duì)象模型參數(shù)的變化。上述7個(gè)分類級(jí)別的模糊化方法,對(duì)于絕大多數(shù)對(duì)象具有普適性。由此得到的控制器稱為模糊控制器。快反鏡伺服裝置模糊控制系統(tǒng)原理框圖如圖4所示。
2)兼顧準(zhǔn)確性及快速性,擬定模糊控制器為兩輸入三輸出模式,并設(shè)定輸入為e和ec,輸出為Kp、Ki和Kd. 將e、ec、Kp、Ki、Kd按照前文所述分為7個(gè)級(jí)別,依次為NB(負(fù)大)、NM(負(fù)中)、NS(負(fù)小)、ZO(零位)、PS(正小)、PM(正中)、PB(正大)。并根據(jù)原理圖4,得到整個(gè)模糊控制系統(tǒng)結(jié)構(gòu)圖,如圖5所示。圖5中,qe、qec為輸入的量化因子,qp、qi和qd為輸出的比例因子,E和EC分別為偏差及偏差變化率,KP、KI、KD分別為被控對(duì)象的比例、微分、積分3個(gè)被控參數(shù)。
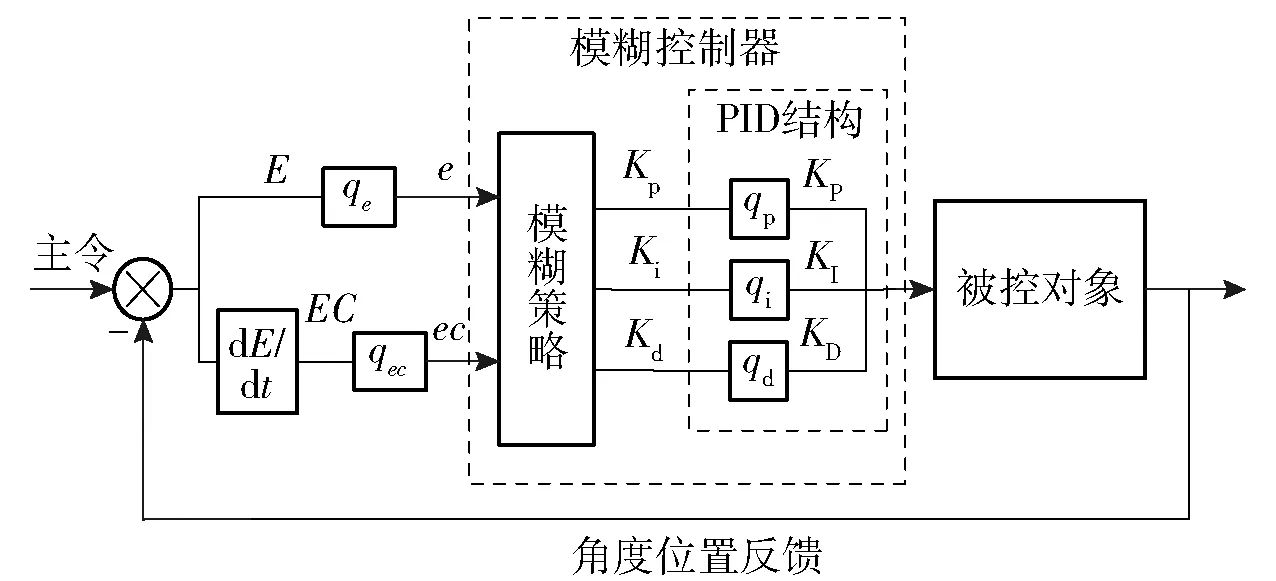
圖5 模糊控制系統(tǒng)結(jié)構(gòu)圖Fig.5 Structure diagram of fuzzy control system
模糊控制器輸入及輸出的調(diào)整公式分別如(3)式和(4)式所示。
(3)
(4)
3.2 模糊化處理
根據(jù)模糊控制原理及控制器設(shè)計(jì)規(guī)則,設(shè)定模糊控制器的輸入變量分別為e、ec,輸出變量分別為Kp、Ki和Kd,輸入變量的變化區(qū)間為[-6,6],輸出變量的變化區(qū)間為[1,13],對(duì)應(yīng)的論域?yàn)閑,ec={-6,-4,-2,0,2,4,6},Kp,Ki,Kd={1,3,5,7,9,11,13},并且設(shè)其模糊子集為
e,ec,Kp,Ki,Kd={NB,NM,NS,ZO,PS,PM,PB}.
qe、qec、qp、qi、qd數(shù)值在4.2節(jié)仿真實(shí)驗(yàn)中給出。輸入變量及輸出變量的隸屬度函數(shù)均采用三角形隸屬度函數(shù)[22],如圖6和圖7所示,其縱坐標(biāo)為隸屬度,橫坐標(biāo)為域值。
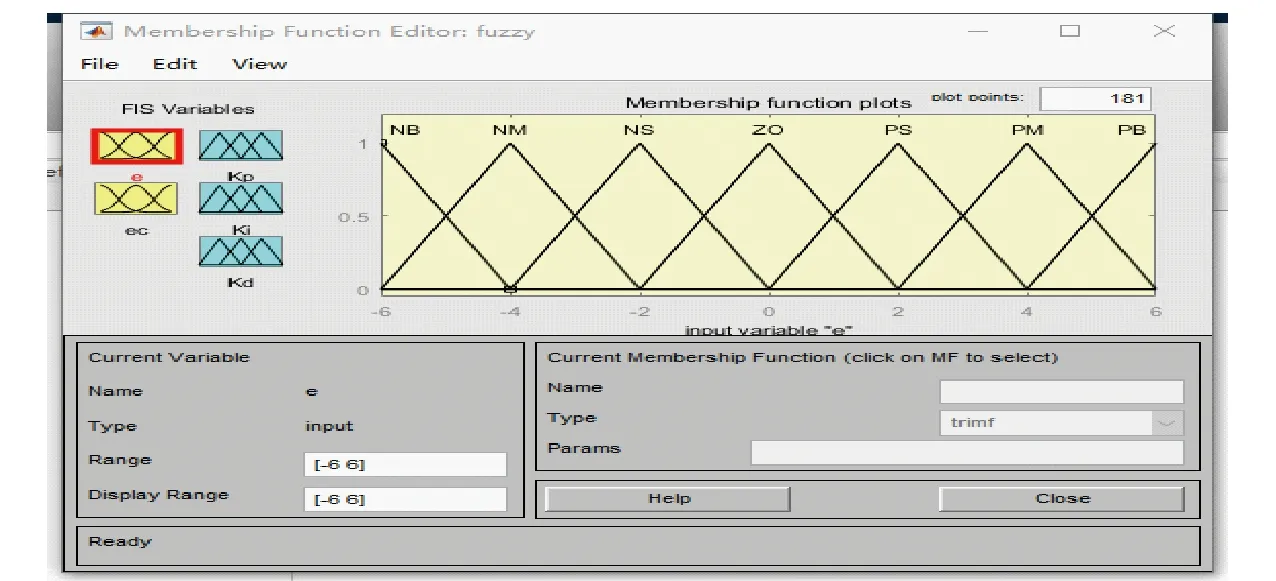
圖6 e、ec隸屬度Fig.6 e, ec memberships
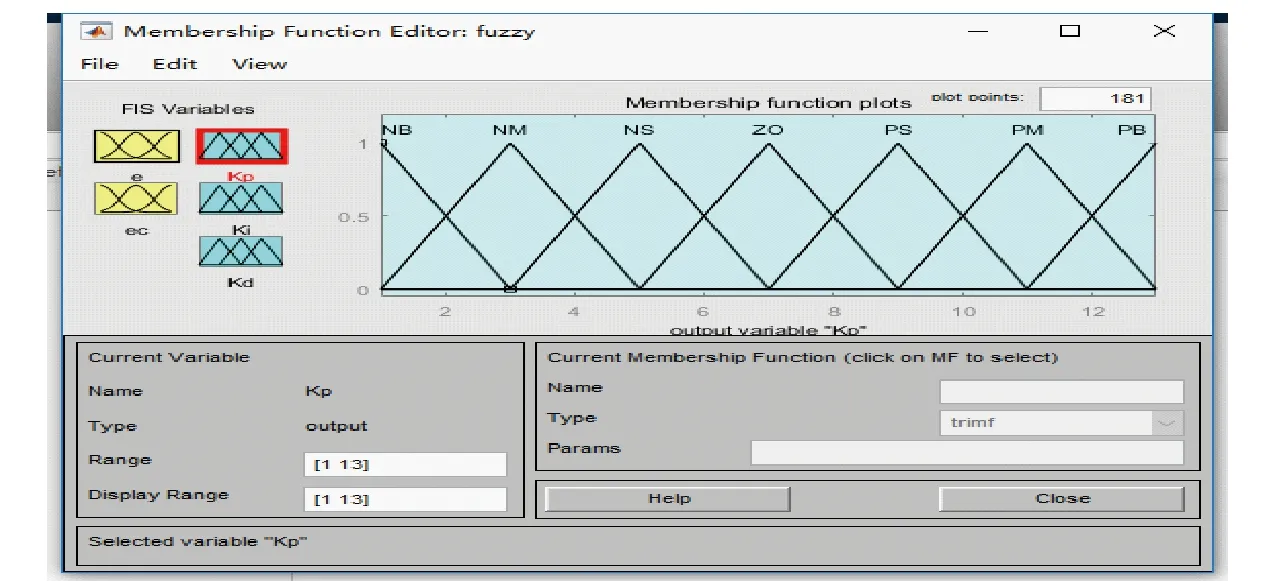
圖7 Kp、Ki、Kd隸屬度Fig.7 Kp, Ki, Kd memberships
3.3 模糊控制規(guī)則表的建立及模糊推理過程
根據(jù)模糊控制器Kp、Ki、Kd3個(gè)輸出量在控制過程當(dāng)中的作用及其變化后對(duì)控制性能不同影響的原理,針對(duì)快反鏡的控制特點(diǎn)是“通過提高響應(yīng)快速性來達(dá)到減小隨動(dòng)誤差的效果”,特別對(duì)快反鏡領(lǐng)域?qū)<业墓こ陶{(diào)試經(jīng)驗(yàn)研究總結(jié)后,確定Kp、Ki、Kd3個(gè)輸出量的自整定原則如下[23-26]:
1)當(dāng)輸入e的幅值處于較大情況時(shí),一方面為了提高系統(tǒng)的響應(yīng)速度,另一方面為了避免系統(tǒng)初始時(shí)由于e突變?cè)龃筮M(jìn)而產(chǎn)生的微分過飽和現(xiàn)象,控制變量參數(shù)Kp應(yīng)取較大值,Kd應(yīng)取較小值。同時(shí)為避免系統(tǒng)響應(yīng)產(chǎn)生較大的超調(diào)現(xiàn)象,Ki要盡可能小;
2)當(dāng)輸入e和ec的幅值處于中等大小情況時(shí),為了減小系統(tǒng)的超調(diào)量以及保證系統(tǒng)有較優(yōu)的響應(yīng)速度,Kp應(yīng)保持在較小的狀態(tài);
3)當(dāng)輸入ec的幅值處于較小情況下,同樣也就意味著整個(gè)系統(tǒng)趨于穩(wěn)定時(shí)。此刻,為了保證系統(tǒng)有著良好的穩(wěn)態(tài)性能,需將Kp、Ki的值增大,同時(shí)為避免輸出響應(yīng)產(chǎn)生振蕩情況,應(yīng)適當(dāng)選取Kd的值。
參考以上自整定原則并綜合專家的控制經(jīng)驗(yàn),建立如下模糊邏輯語(yǔ)句[27-28]:
1)if(eis NB) and (ecis NB) then (Kpis PB)(Kiis NB)(Kdis PS);
2)if(eis NB) and (ecis NM) then (Kpis PB)(Kiis NB)(Kdis NS);
3)if(eis NB) and (ecis NS) then (Kpis PM)(Kiis NM)(Kdis NB);
4)if(eis NB) and (ecis ZO) then (Kpis PM)(Kiis NM)(Kdis NB);
?
49)if(eis PB) and (ecis PB) then (Kpis NB)(Kiis PB)(Kdis PB).
由以上模糊邏輯語(yǔ)句可以得到如下關(guān)于Kp、Ki、Kd的模糊規(guī)則如表1、表2、表3[29-30]所示。
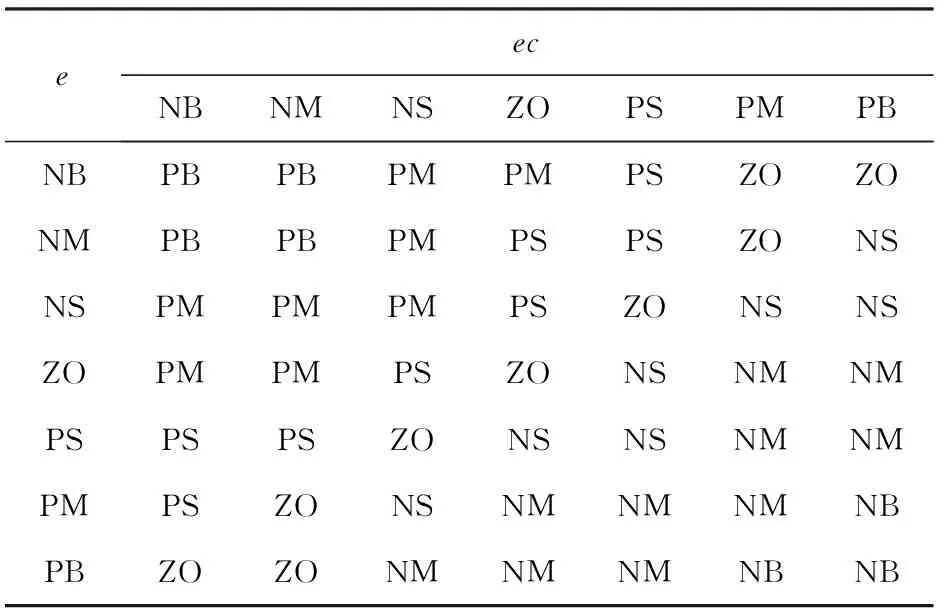
表1 Kp模糊規(guī)則表Tab.1 Kp fuzzy rules
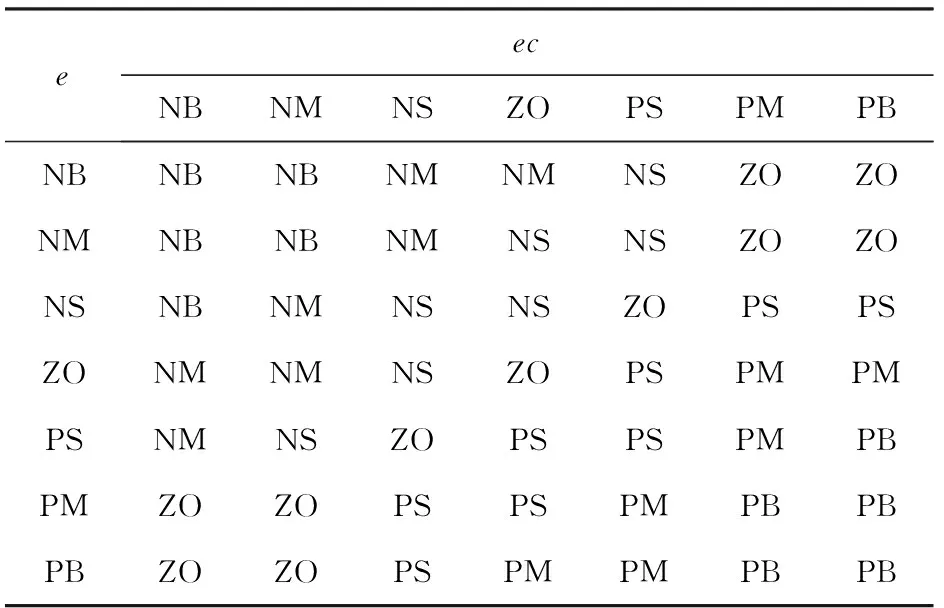
表2 Ki模糊規(guī)則表Tab.2 Ki fuzzy rules
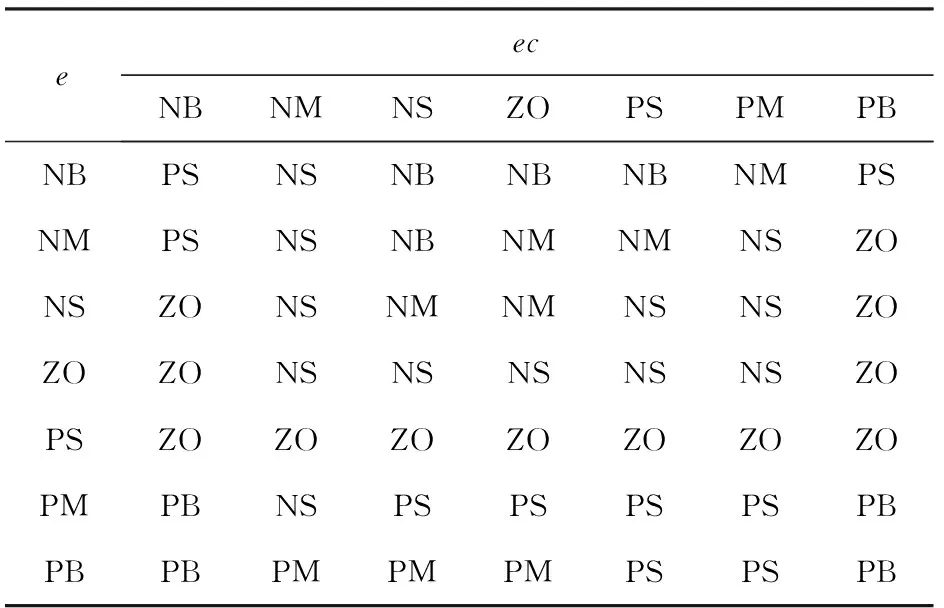
表3 Kd模糊規(guī)則表Tab.3 Kd fuzzy rules
3.4 去模糊化處理
通過以上模糊推理得到的是前文所述基于7個(gè)分類級(jí)別的模糊控制量,而整個(gè)控制系統(tǒng)中實(shí)際作用于被控對(duì)象的是精確控制量,因此需要將模糊控制量轉(zhuǎn)換為精確控制量。綜合考慮,本文采用了重心法[31]來進(jìn)行去模糊化處理。具體方法如(2)式、(4)式所示。
4 系統(tǒng)仿真分析
4.1 仿真實(shí)驗(yàn)?zāi)康募皟?nèi)容
為了驗(yàn)證提出的模糊控制策略對(duì)提升快反鏡伺服性能的有效性,以基于高頻搖擺電機(jī)的快反鏡為應(yīng)用對(duì)象設(shè)計(jì)了模糊控制器,開展了采用模糊控制器的快反鏡與基于傳統(tǒng)PID控制快反鏡對(duì)比仿真實(shí)驗(yàn)。仿真實(shí)驗(yàn)根據(jù)復(fù)合軸系統(tǒng)應(yīng)用背景的需求,主要就以下4個(gè)方面的性能進(jìn)行了對(duì)比研究:
4.1.1 階躍輸入響應(yīng)性能
穩(wěn)定裕量是控制系統(tǒng)工作的前提條件,所以仿真實(shí)驗(yàn)首先考查階躍響應(yīng)的超調(diào)等過渡過程指標(biāo)。
4.1.2 抑制帶寬
對(duì)于復(fù)合軸跟蹤的應(yīng)用背景,快反鏡用于抑制主軸的殘差。抑制帶寬是衡量殘差抑制能力的核心指標(biāo),因此仿真實(shí)驗(yàn)中計(jì)算了兩類控制系統(tǒng)伺服回路的抑制帶寬作為性能優(yōu)劣的理論判據(jù)。
4.1.3 正弦輸入響應(yīng)性能
比較在典型正弦激勵(lì)下兩類控制系統(tǒng)的隨動(dòng)誤差大小。
4.1.4 隨機(jī)輸入響應(yīng)性能
使用多階諧波信號(hào)疊加來模擬實(shí)際殘差輸入的隨機(jī)特性,仿真比較在該激勵(lì)信號(hào)作用下兩類控制系統(tǒng)的隨動(dòng)誤差,作為對(duì)抑制帶寬理論評(píng)判結(jié)果的綜合印證。
4.2 仿真模型及相關(guān)對(duì)象參數(shù)
高頻搖擺電機(jī)是一類特殊的有限轉(zhuǎn)角無刷力矩電機(jī),擁有力矩電機(jī)所固有的轉(zhuǎn)動(dòng)范圍大、負(fù)載能力強(qiáng)的基本特性;同時(shí)通過電機(jī)本體與負(fù)載反射鏡結(jié)構(gòu)一體化設(shè)計(jì)的方式,大大提高了裝置的結(jié)構(gòu)諧振頻率,使其具有高頻搖擺的可能,配合高精度的測(cè)角反饋和相應(yīng)的控制算法,可達(dá)到高動(dòng)態(tài)、高精度的控制性能,從而可作為大負(fù)載快反鏡的驅(qū)動(dòng)執(zhí)行元件。仿真實(shí)驗(yàn)中采用的基于高頻搖擺電機(jī)的快反鏡其負(fù)載質(zhì)量約1 kg,轉(zhuǎn)動(dòng)慣量達(dá)10-3kg·m2量級(jí),對(duì)象等效傳遞函數(shù)見(5)式。
(5)
在MATLAB/Simulink里搭建好基于模糊控制與基于傳統(tǒng)PID控制的快反鏡系統(tǒng)仿真模型,如圖8所示。圖8中:基于高頻搖擺電機(jī)的快反機(jī)構(gòu)等效傳遞函數(shù)(FSM1、FSM2)為(5)式;PA1、PA2為線性功放驅(qū)動(dòng)器,用放大倍率表示;傳統(tǒng)PID控制器采用臨界靈敏度法整定控制參數(shù),得到PID參數(shù)分別為p=14,i=1 300,d=0.004 5;fuzzy controller詳細(xì)設(shè)計(jì)結(jié)果見第3節(jié)中具體內(nèi)容,其量化因子取值為qe=2 400,qec=2,比例因子取值為qp=10,qi=200,qd=0.015;angle1、agnle2為角位置反饋,取值考慮入射光線偏轉(zhuǎn)與鏡面機(jī)械偏轉(zhuǎn)角之間的關(guān)系;仿真模型中設(shè)置了快反鏡角位置(FSM angle position)和隨動(dòng)誤差(FSM servo error)兩個(gè)輸出觀測(cè)點(diǎn)。

圖8 模糊控制與PID控制系統(tǒng)仿真模型圖Fig.8 Simulation model of fuzzy control and PID control system
4.3 階躍輸入響應(yīng)性能對(duì)比仿真
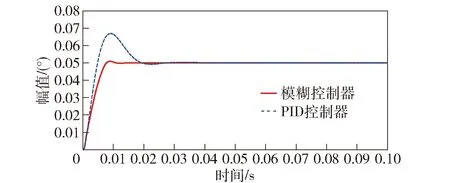
圖9 模糊控制與PID控制快反鏡階躍響應(yīng)曲線對(duì)比Fig.9 Step response curves of FSM by fuzzy control and PID control
在仿真模型中施加階躍激勵(lì)信號(hào),比較模糊控制與PID控制下快反鏡角位置輸出的階躍響應(yīng)曲線,如圖9所示。
依據(jù)圖9不同的輸出波形,對(duì)比分析可得兩個(gè)系統(tǒng)階躍響應(yīng)性能指標(biāo),在表4中給出。由表4可以看出,模糊控制器與PID控制器相比,其調(diào)節(jié)時(shí)間更短,更快進(jìn)入穩(wěn)態(tài),而且超調(diào)量非常小,無振蕩。
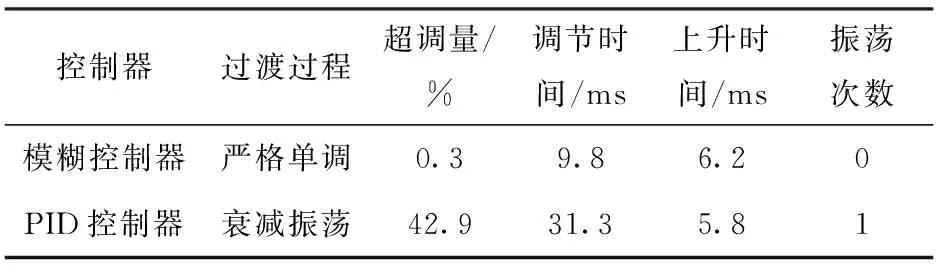
表4 兩種控制器階躍響應(yīng)性能對(duì)比Tab.4 Comparison of step response performances oftwo controllers
4.4 抑制帶寬計(jì)算及對(duì)比仿真
抑制帶寬具體計(jì)算方法[32]如下:
設(shè)置輸入正弦信號(hào)的幅值A(chǔ)i,頻率fi,測(cè)量隨動(dòng)誤差的幅值Bi,則抑制比ki的計(jì)算公式為
(6)
式中:ki為當(dāng)輸入信號(hào)頻率為fi時(shí)的抑制比;Bi為當(dāng)輸入信號(hào)頻率為fi時(shí)隨動(dòng)誤差幅值(″);Ai為當(dāng)輸入信號(hào)頻率為fi時(shí)輸入信號(hào)的幅值(″);i為當(dāng)前測(cè)試的序次數(shù),i=1,2,3,…,n.
當(dāng)ki≈1時(shí),此時(shí)的輸入信號(hào)頻率值fi則為快反鏡伺服回路的抑制帶寬。
通過數(shù)次仿真實(shí)驗(yàn),ki逐步增大,直到逼近1時(shí),得出如表5實(shí)驗(yàn)結(jié)果(特別說明,仿真實(shí)驗(yàn)幅值采用的單位統(tǒng)一為(°),表格將(°)換算成(″),輸入幅值均為Ai=72″)。

表5 不同頻率下兩種控制器的抑制比對(duì)比Tab.5 Suppression ratios of two controllers at differentfrequencies
4.4.1 實(shí)驗(yàn)結(jié)果1
從表5看出,當(dāng)fi=50 Hz時(shí),PID控制器的抑制比kfi=1.068≈1,此時(shí)兩種控制器下隨動(dòng)誤差的仿真結(jié)果分別如圖10和圖11所示。
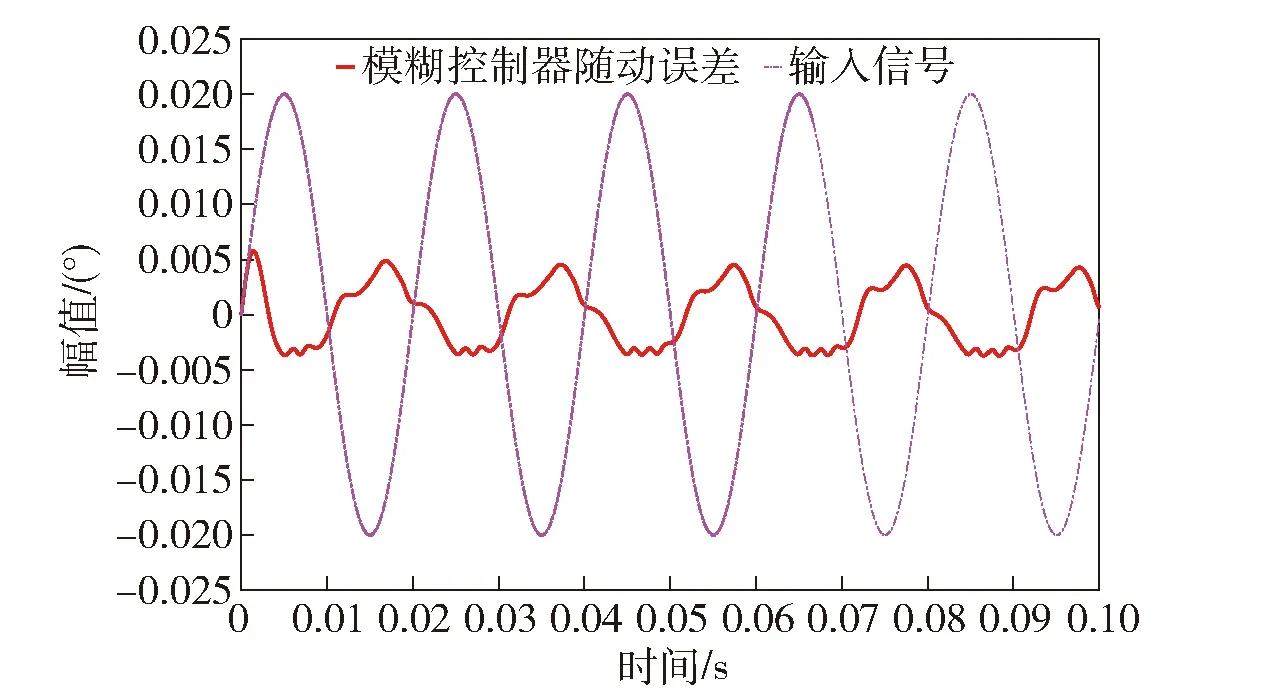
圖10 模糊控制器下輸入信號(hào)與隨動(dòng)誤差的 幅值比較(fi=50 Hz)Fig.10 Amplitudes of input signal and E at the input signal frequency of 50 Hz under the control of fuzzy controller
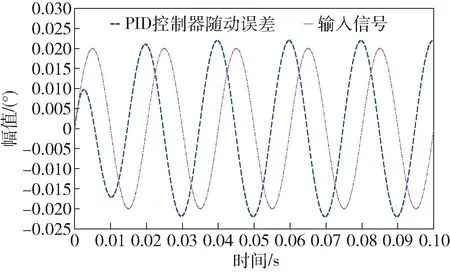
圖11 PID控制器下輸入信號(hào)與隨動(dòng)誤差的 幅值比較(fi=50 Hz)Fig.11 Amplitudes of input signal and E at the input signal frequency of 50 Hz under the control of PID controller
4.4.2 實(shí)驗(yàn)結(jié)果2
從表5看出,當(dāng)fi=120 Hz時(shí),模糊控制器的抑制比ki=0.980 0≈1,此時(shí)兩種控制器下隨動(dòng)誤差的仿真結(jié)果分別如圖12和圖13所示。
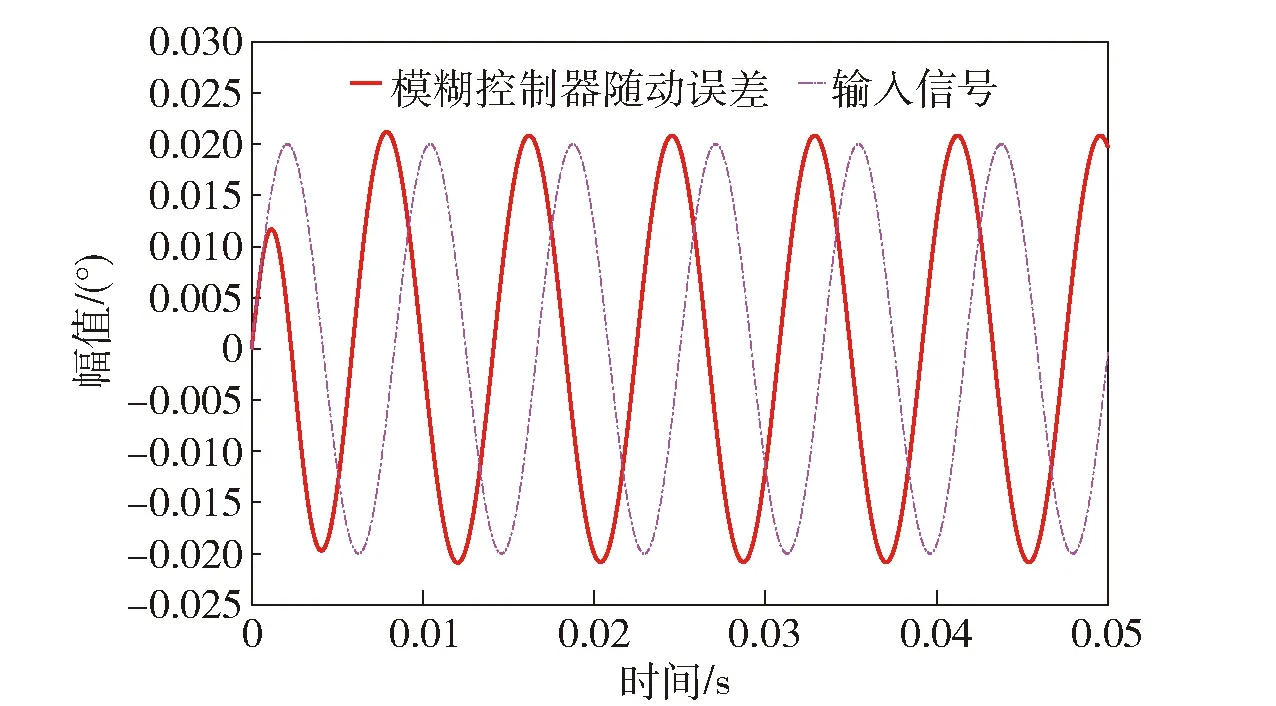
圖12 模糊控制器下輸入信號(hào)與隨動(dòng)誤差的 幅值比較(fi=120 Hz)Fig.12 Amplitudes of input signal and E at the input signal frequency of 120 Hz under the control of fuzzy controller
通過實(shí)驗(yàn)結(jié)果1和實(shí)驗(yàn)結(jié)果2可以看出:采用傳統(tǒng)PID控制器,系統(tǒng)抑制比ki≈1時(shí),其抑制帶寬為fi=50 Hz;而采用模糊控制器,當(dāng)系統(tǒng)抑制比ki≈1時(shí),其抑制帶寬為fi=120 Hz. 由此可得出結(jié)論,采用模糊控制系統(tǒng)的抑制帶寬遠(yuǎn)高于采用傳統(tǒng)PID控制的抑制帶寬,因此模糊控制非常適合用于復(fù)合軸跟蹤應(yīng)用的快反鏡伺服系統(tǒng)。
4.5 正弦輸入下性能對(duì)比仿真
輸入頻率為10 Hz、幅值為0.02°的正弦信號(hào),可得出模糊控制誤差曲線與PID控制系統(tǒng)誤差曲線對(duì)比,如圖14所示。
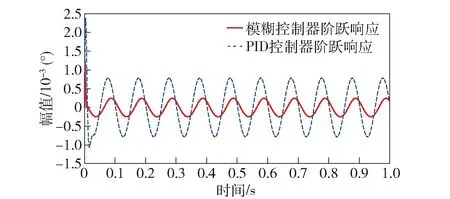
圖14 模糊控制器誤差曲線與PID控制器誤差曲線對(duì)比Fig.14 Error curves of fuzzy controller and PID controller
依據(jù)圖14兩控制器誤差曲線圖分析可得:模糊控制最大誤差為0.453 6″,PID控制最大誤差為2.955 6″,模糊控制相對(duì)于PID控制,誤差明顯減小。
4.6 隨機(jī)輸入性能對(duì)比
4.4節(jié)的仿真實(shí)驗(yàn)結(jié)果表明:采用模糊控制器的快反鏡,其抑制帶寬顯著高于采用傳統(tǒng)PID控制器的快反鏡;本節(jié)通過多次諧波疊加的方式構(gòu)造激勵(lì)信號(hào),模擬復(fù)合軸系統(tǒng)實(shí)際工況下的殘差隨機(jī)特性,比較在隨機(jī)輸入下兩種控制系統(tǒng)的快反鏡誤差特性,對(duì)抑制帶寬理論評(píng)判結(jié)果進(jìn)行綜合印證。
根據(jù)對(duì)某型復(fù)合軸系統(tǒng)主軸殘差頻譜特性的分析結(jié)果,構(gòu)造如下激勵(lì)信號(hào)模擬殘差的隨機(jī)特性:
輸入信號(hào)=諧波1+諧波2+諧波3,其中:1)諧波1為1 Hz、0.1°正弦信號(hào);2)諧波2為10 Hz、0.02°正弦信號(hào);3)諧波3為40 Hz、0.005°正弦信號(hào)。
當(dāng)輸入激勵(lì)為上述多次諧波信號(hào)疊加構(gòu)成時(shí),可得出模糊控制系統(tǒng)誤差曲線與PID控制系統(tǒng)誤差曲線對(duì)比,如圖15所示。

圖15 模擬隨機(jī)輸入信號(hào)下模糊控制器與PID控制器誤差曲線對(duì)比Fig.15 Error curves of fuzzy controller and PID controller in case of random input signals
根據(jù)圖15兩誤差曲線圖分析可得:模糊控制穩(wěn)態(tài)誤差均方根為1.620″,PID控制穩(wěn)態(tài)誤差均方根為12.996″,模糊控制在輸入為隨機(jī)信號(hào)時(shí),性能明顯優(yōu)于PID控制。該結(jié)果與抑制帶寬的計(jì)算結(jié)果相吻合。上述隨機(jī)輸入信號(hào)中最高頻率分量為40 Hz,而模糊控制系統(tǒng)的抑制帶寬約為120 Hz,遠(yuǎn)遠(yuǎn)高于輸入信號(hào)頻率,所以能很好地抑制輸入信號(hào)擾動(dòng);而對(duì)照PID控制系統(tǒng),其抑制帶寬約為50 Hz,幾乎與輸入的最高頻率持平,故不能有效抑制輸入擾動(dòng),隨動(dòng)誤差呈數(shù)量級(jí)上升。
5 結(jié)論
針對(duì)高品質(zhì)控制要求下傳統(tǒng)PID控制器的局限性,本文提出將模糊控制策略與PID相結(jié)合設(shè)計(jì)快反鏡伺服控制器,并以基于高頻搖擺電機(jī)的快反鏡為應(yīng)用對(duì)象進(jìn)行了模糊控制器的設(shè)計(jì)實(shí)現(xiàn)。通過抑制帶寬計(jì)算、階躍輸入、正弦輸入、隨機(jī)輸入下伺服性能與基于PID控制的快反鏡系統(tǒng)對(duì)比,表明了采用模糊控制器的快反鏡有著響應(yīng)速度更快、無超調(diào)和震蕩現(xiàn)象、隨動(dòng)誤差更小、抑制帶寬顯著增加等優(yōu)勢(shì)。由于本文的研究目的是提高快反鏡伺服性能來優(yōu)化殘差抑制能力,最終通過構(gòu)造實(shí)際工況下的殘差隨機(jī)輸入,比較模糊控制器與傳統(tǒng)PID控制器的不同效果,驗(yàn)證了模糊控制器殘差抑制能力更顯著優(yōu)于傳統(tǒng)PID控制器,尤其適合作為子軸應(yīng)用于高精度復(fù)合軸跟蹤系統(tǒng),在諸如戰(zhàn)術(shù)激光武器等要求跟瞄精度達(dá)到微弧度量級(jí)的光束定向場(chǎng)合具有巨大的應(yīng)用潛力。
但是,由于模糊控制算法的獨(dú)特性,其控制效果相當(dāng)依賴專家的控制經(jīng)驗(yàn),因此不僅會(huì)導(dǎo)致跟蹤精度、響應(yīng)速度受限于有限的控制經(jīng)驗(yàn),也會(huì)導(dǎo)致同樣的模糊控制算法在不同驅(qū)動(dòng)方式的快反鏡上控制效果存在差異的問題。隨著機(jī)器學(xué)習(xí)的不斷發(fā)展,這一問題也有了解決途徑,通過機(jī)器學(xué)習(xí)可以不斷積累不同情況下的控制經(jīng)驗(yàn),并根據(jù)實(shí)際工作情況篩選最優(yōu)控制經(jīng)驗(yàn),從而使知識(shí)庫(kù)和模糊推理規(guī)則不斷更新和完善,因此可以顯著提升模糊控制的控制性能,屆時(shí)模糊控制將會(huì)廣泛適用于各類快反鏡控制系統(tǒng)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
- 兵工學(xué)報(bào)的其它文章
- 基于仿真的合成部隊(duì)裝備維修保障資源需求確定和效能評(píng)估
- 基于拓?fù)鋭?shì)的作戰(zhàn)體系網(wǎng)絡(luò)節(jié)點(diǎn)重要度評(píng)估方法
- 基于Elman神經(jīng)網(wǎng)絡(luò)和Copula函數(shù)的多維裝備效能評(píng)估模型
- 基于深度神經(jīng)網(wǎng)絡(luò)的無人作戰(zhàn)飛機(jī)自主空戰(zhàn)機(jī)動(dòng)決策
- 二維矢量水聽器及其在Argo浮標(biāo)平臺(tái)上的應(yīng)用技術(shù)
- 基于概率假設(shè)密度濾波與無跡Kalman濾波的多目標(biāo)跟蹤與識(shí)別