焦深延拓的透霧連續變焦光學系統設計
2020-09-28 05:34:00丁貴鵬陶鋼龐春橋王小峰
兵工學報 2020年8期
丁貴鵬,陶鋼,龐春橋,王小峰
(南京理工大學 能源與動力工程學院,江蘇 南京 210094)
0 引言
連續變焦鏡頭主要的設計難點為:在焦距從頭到尾的變化過程中,鏡頭像面位置需保持穩定,否則會由于離焦而引起像質嚴重退化[1-3]。然而不同焦距下系統像面難以完全重合,另外還有光機結構的加工和裝調誤差,或是環境溫度變化都將引起焦面漂移,漂移量往往超過系統正常焦深,導致成像模糊。
霾和細水霧對紅外光波的衰減通常小于可見光,且近紅外波段的探測器成本較中長波紅外更低,成像分辨率更好,因而近年來近紅外光學成為霧天光電成像的首選手段[4-7]。綜上所述,迫切需要研究具有大焦深的近紅外透霧連續變焦光學系統,其將在軍事偵察和日常生活等方面得到廣泛的應用。
近紅外波段的變焦系統已用于霧霾環境成像,如方麗設計變倍比10倍的近紅外攝像一體機鏡頭,其能在可見光波段和850 nm波長成像,但近紅外成像譜段波段較窄[8]。胡際先等設計了一款小型透霧20倍連續變焦系統,實現400~1 000 nm波段透霧成像[9]。但為實現更好的透霧效果,光學系統的工作波段還應進一步向紅外方向移動。目前國內外對焦深延拓的變焦系統研究還比較稀少,為了擴大光學系統焦深,波前編碼是一種有效的低成本焦深/景深調控技術,其利用信號處理理論設計光學系統光瞳函數,可將系統焦深擴大一個數量級[10-12]。目前利用波前編碼技術擴大變焦攝像系統焦深的研究還比較少見,康競然[13]利用波前編碼技術擴大和縮小液體變焦透鏡的景深;Demenikov等[14]利用波前編碼技術設計了僅有變焦組無補償組的變焦鏡頭;Prischepa等[15]設計了廣角波前編碼變焦鏡頭;郭小虎等[16]也進行了變焦光學系統的景深/焦深延拓分析。然而,以上系統通常口徑小、焦距短,難以作為常規攝影變焦系統進行使用,且多圍繞理論分析開展,實際實驗驗證較少。對于復雜的常規透射式焦深延拓變焦系統,其編碼板與光學系統的綜合設計與優化仍是一個難點。綜上所述,本文開展了利用波前編碼技術對近紅外變焦系統進行焦深延拓的研究,并取得了明顯效果。
1 連續變焦系統設計理論
本系統使用的探測器像元大小α為12.5 μm,F/#(系統F數)在不同焦距時為2.8~5.6,則系統光學焦深σ可求:
σ=±α(F/#)=±35~±70 μm,
(1)
其中:短焦時相對孔徑較大,焦深短;長焦時相對孔徑小而焦深長。
波前編碼對焦深的拓展一般在4~20倍之間[17],取最大20倍,則基于波長編碼的變焦系統其短焦位置的焦深也不超過0.7 mm. 因此光學系統在不同焦距位置的像面位置前后相差也不應超過0.7 mm,仍需對像面移動進行補償。考慮到本系統的變倍比為5倍,該變焦系統適合采用機械補償的結構形式。
為盡量節省系統空間尺寸,本文系統采用正組補償的方法進行設計。該光學系統由前固定組1、變倍組2、補償組3、后固定組4組成。其工作原理如圖1所示。圖1中:前固定組為正光焦度,變倍組為負光焦度,補償組、后固定組均為正光焦度。當系統從短焦端變化到長焦端時,變倍組線性移動,補償組進行非線性移動。
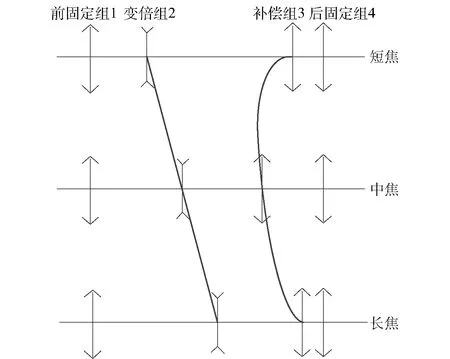
圖1 變焦系統補償原理圖Fig.1 Schematic diagram of zoom system
2 基于波前編碼的變焦系統焦深延拓理論
波前編碼成像技術是在1995年由美國科羅拉多大學首先提出的,在光學系統的光闌處加入一塊精心設計的非球面位相編碼元件,對波前進行調制,從而像面在焦深之內移動的過程中,系統的點擴散函數(PSF)幾乎不發生改變,從而可通過后續圖像處理算法將模糊像統一復原為清晰的復原像,達到焦深延拓的目的。
在波前編碼技術中,非球面位相編碼元件的面形可以選擇立方相位板、對數相位板、指數相位板等。其中立方相位板最為常用,因其打破了旋轉對稱性,能夠獲得較大的焦深擴展范圍。
采用多項式形式立方相位板時,光瞳函數表達式可寫為
(2)
式中:ε為代表相位偏差大小的參量;x、y為光瞳坐標。利用模糊函數和穩相法理論,當系統像差中離焦占主導地位時,可從空間頻域導出基于廣域光瞳函數的光學傳遞函數(OTF)的表達式:

(3)
(4)
從而完全忽略離焦。立方位相板的面形數理方程可寫作:
(5)
對于光闌位于系統中間的連續變焦系統,當系統焦距改變時,孔徑光闌的口徑也隨之變化,如圖2所示。將編碼位相板放置于光闌后方緊貼光闌,則不同變焦情況下位相板通光部分大小不同,即R在不斷變化,設短焦端通光半徑為Rs,長焦端為Rl. 由于位相板面形加工后不再改變,則在z不變的情況下,有
(6)
(7)
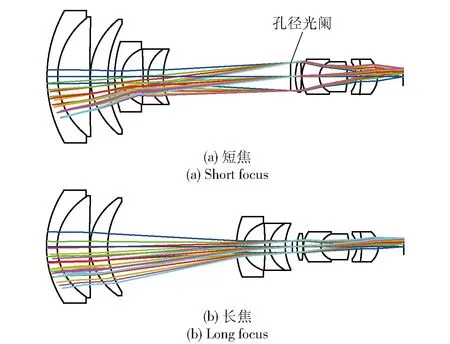
圖2 變焦系統長焦和短焦狀態時的 孔徑光闌口徑變化Fig.2 Aperture change of zoom system from short focus to long focus
式中:εs、εl分別為短焦、長焦端的3次位相板參數。由圖2可知,Rs>Rl,因此εs<εl. 可知從短焦端到長焦端,系統的3次位相板參數不斷增大。由(4)式可知,當位相板參數越大,系統OTF與離焦量相關性越小。但位相板參數大到一定程度,加入的光瞳波前像差過大,高頻信息丟失,得到的模糊圖像可能無法恢復。由第1節可知,短焦端焦深是長焦端的1/2,因此變焦系統的像面裝調誤差等應受短焦端焦深限制。因此,設計波前編碼位相板并優化位相板參數時,一方面應盡量增大εs使得短焦端焦深延拓倍率最大,另一方面也應注意長焦端相應焦深范圍內的圖像可復原性。
3 設計實例與成像模擬
3.1 連續變焦系統光學設計
根據機械補償的變焦光學系統設計原理,設計了一個大視場近紅外連續變焦系統,其指標要求如表1所示。
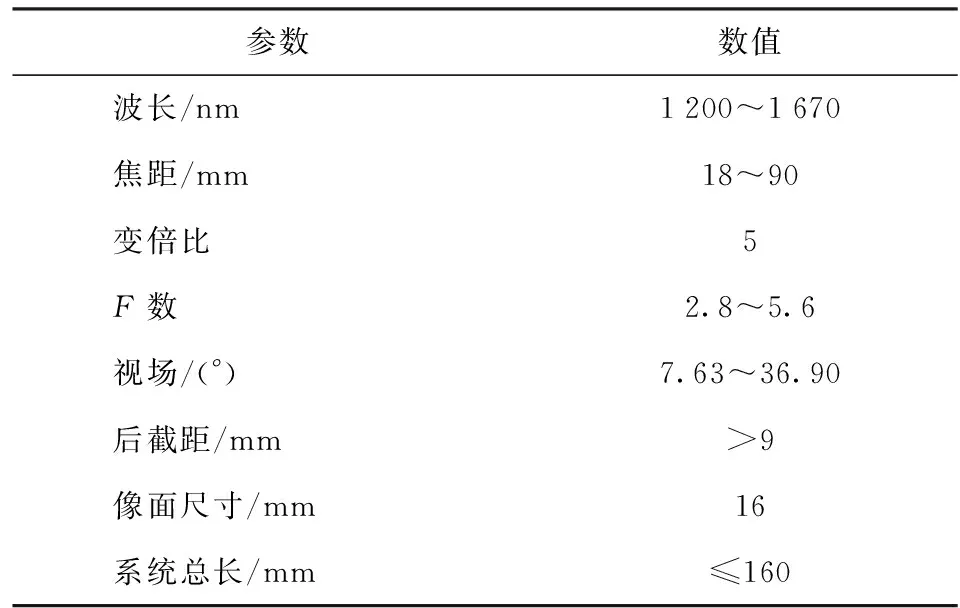
表1 系統光學參數Tab.1 System optical parameters
該系統變倍比適中,主要特點為短焦端相對口徑較大(F/#=2.8),且視場角很大(36.90°),為獲得足夠的優化變量適合采用4組式結構,由前固定組、變倍組、補償組,后固定組組成。可變孔徑光闌設置在補償組。各組焦距如表2所示,各組間隔與移動量如表3所示。表3中:d12、d23、d34分別為前固定組與變倍組、變倍組與補償組、補償組與后固定前組之間的距離;q2和q3分別為變倍組和補償組相對于初始位置(短焦端)的移動距離,其中向右移動符號為“-”,向左移動符號為“+”。

表2 各組元焦距Tab.2 Focal length of each component mm
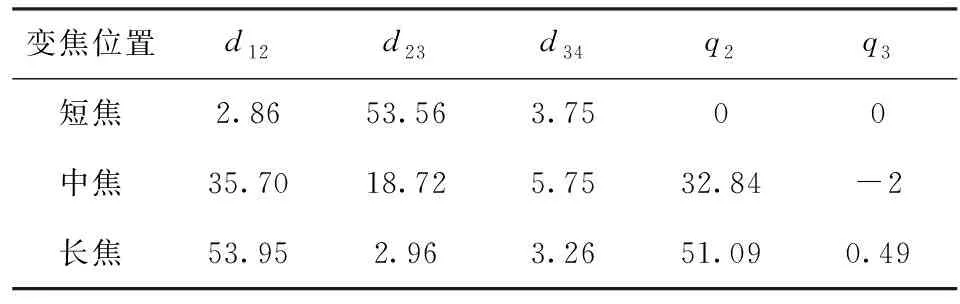
表3 各組間間隔與移動量 Tab.3 Intervals and movement of each component mm
為了降低系統加工檢測的成本和難度,透鏡部分全部使用球面,玻璃使用國產玻璃。系統總長為150 mm,后截距9.8 mm,滿足小型化要求和后工作距要求。
最終設計的系統優化結果如圖2所示。波前編碼位相板暫時用不影響像質的薄平行平板代替,位于系統光闌處,后續將進一步設計其面形。位相板隨補償組一起移動。
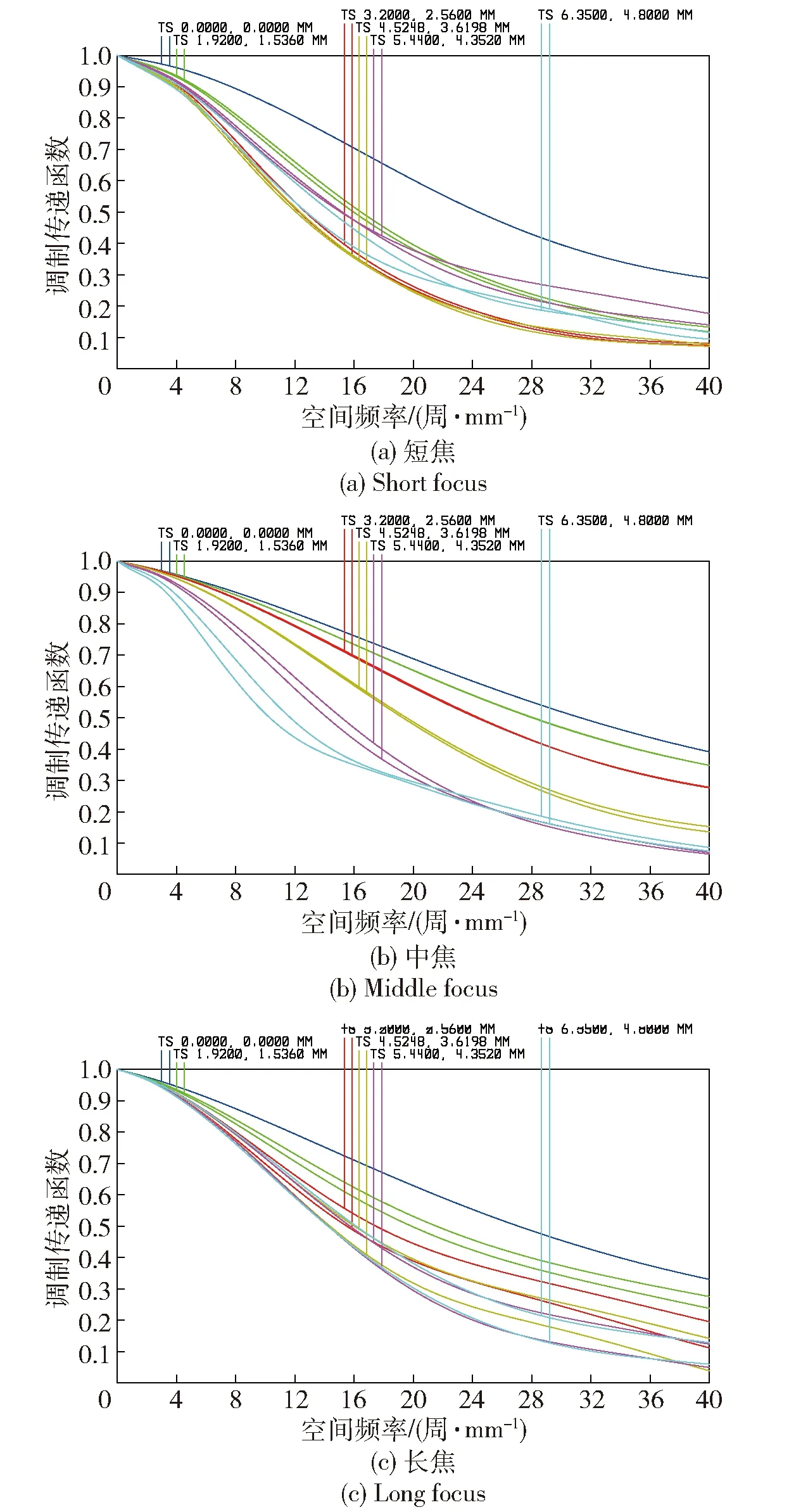
圖3 不同變焦位置的MTFFig.3 MTFs of different system zoom positions
圖3為系統調制傳遞函數(MTF)曲線。由于篇幅限制,僅列出短焦、中焦、長焦位置的MTF曲線。由于探測器像元為12.5 μm,觀測該系統奈奎斯特頻率40 lp/mm處MTF值,均大于0.05,說明該系統像質較好。
系統連續變焦凸輪曲線設計結果如圖4所示,其中橫坐標表示凸輪軸向轉動的角度,縱坐標表示變倍組和補償組隨凸輪轉角的矢量運動距離。由圖4可見凸輪曲線十分平滑,變倍組線性運動,補償組非線性運動且導程很小,十分有利于加工。
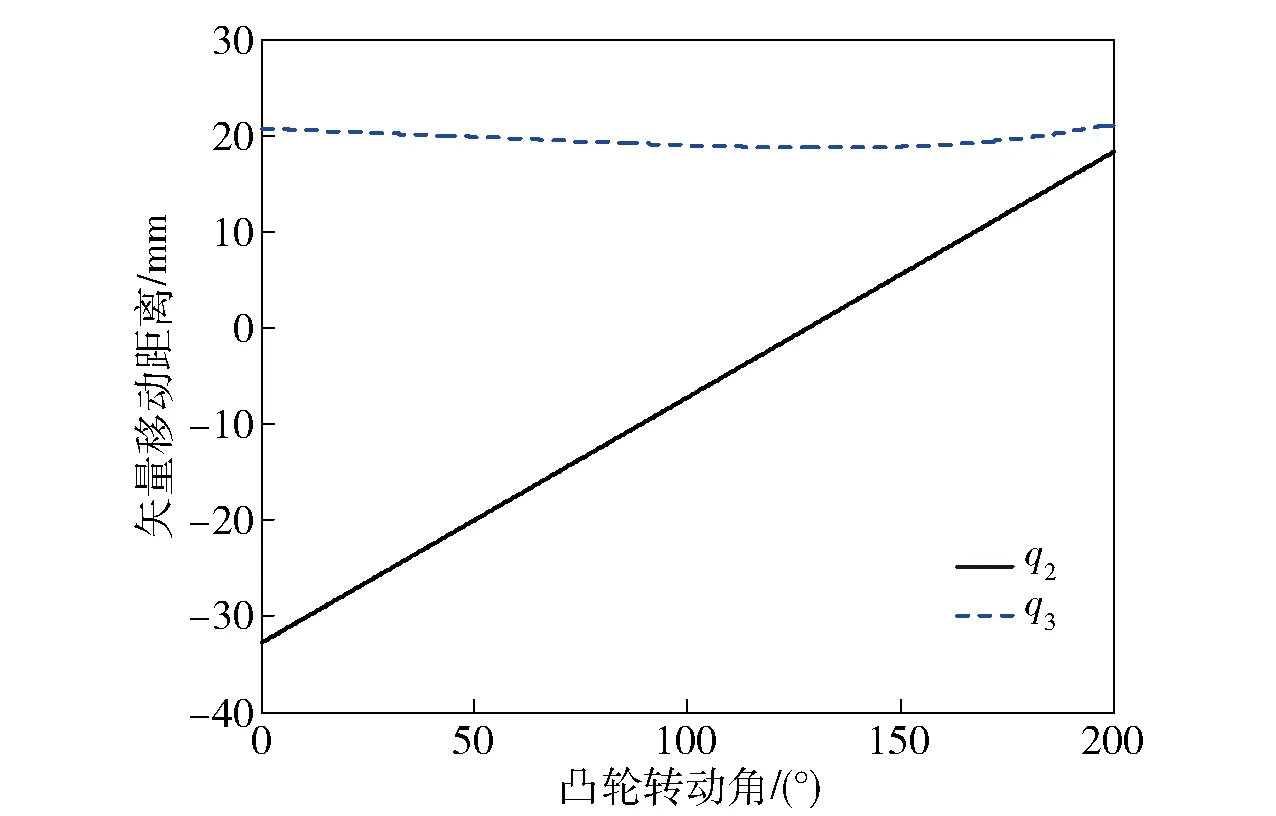
圖4 系統凸輪曲線Fig.4 Zoom paths of system
3.2 波前編碼位相板設計與成像模擬
在第3.1節中連續變焦系統的光學基本結構設計完成,同時校正大像差,避免了破壞波前編碼成像。根據第1節研究,應首先按短焦端的參數設計位相板。具體設計步驟為:1)確定位相板的材料、口徑;2)給出短焦端的位相板參數ε1的初始值,換算為3次項系數并輸入光學設計軟件。位相板采用聚甲基丙烯酸甲酯(PMMA)材料,其折射率n=1.491 8,厚度2 mm,通光口徑按短焦處光闌通光尺寸Rs=6.63 mm,εs初始設為20. 可采用軟件自帶的擴展多項式面型來描述3次位相板,其基本公式為
(8)

(9)
式中:c為面型曲率半徑;r為位相板的徑向坐標;k為2次系數,此處均為0;Ai為多項式各項的系數,本文僅使用a8、a9項;Ei(x,y)為多項式的各項,i=1,2,…,N. 將已知參數代入(5)式,得到a8=a9=1.001 2×10-4.
可利用光學設計軟件對編碼板參數進行優化。通過光線追跡方式,將實際光學系統的像差考慮在內,通過軟件中的評價函數(MF)對各視場點的斯特列爾比(SR)進行優化。SR是指在相同光闌直徑時,實際光學系統(有像差)與理想光學系統(無像差)PSF的峰值光強之比,是評價光學系統成像質量的主流指標之一。對于同一變焦位置,在焦深范圍內的各離焦位置的SR值應該趨同,以保證加入波前編碼板后在拓展焦深內成像質量無變化;同時,由于解碼會引入振鈴噪聲等,SR值必須在一定閾值以上,以保證系統成像可恢復。最終系統MF可寫為
(10)
式中:l為變焦典型位置數量;Wp為各焦距權重;Std代表在該變焦位置,各離焦點和各視場點的SR的標準偏差,并附加SR值不能低于設定的最小值的邊界條件;p為不同離焦點的編號,j為不同視場點的編號。優化過程即是優化εs,使MF值最小的過程。
在優化開始時,應先選擇一個期望焦深值,并在這一范圍內選取幾個典型離焦點,將其SR值寫入MF. 設定初始SR最小值。優化完成后,對于各離焦點所成的波前編碼中間模糊圖像,用焦點處的PSF矩陣作為復原的濾波器,對中間模糊圖像進行維納濾波,得到復原圖像。若復原圖像效果很好,則進一步增大焦深取值,降低SR最小值限制;反之減小焦深取值,增大SR最小值,重復以上步驟,直到獲得剛好能夠復原的焦深極大值。
具體波前編碼位相板參數優化流程如圖5所示,其中β為焦深擴展倍率。
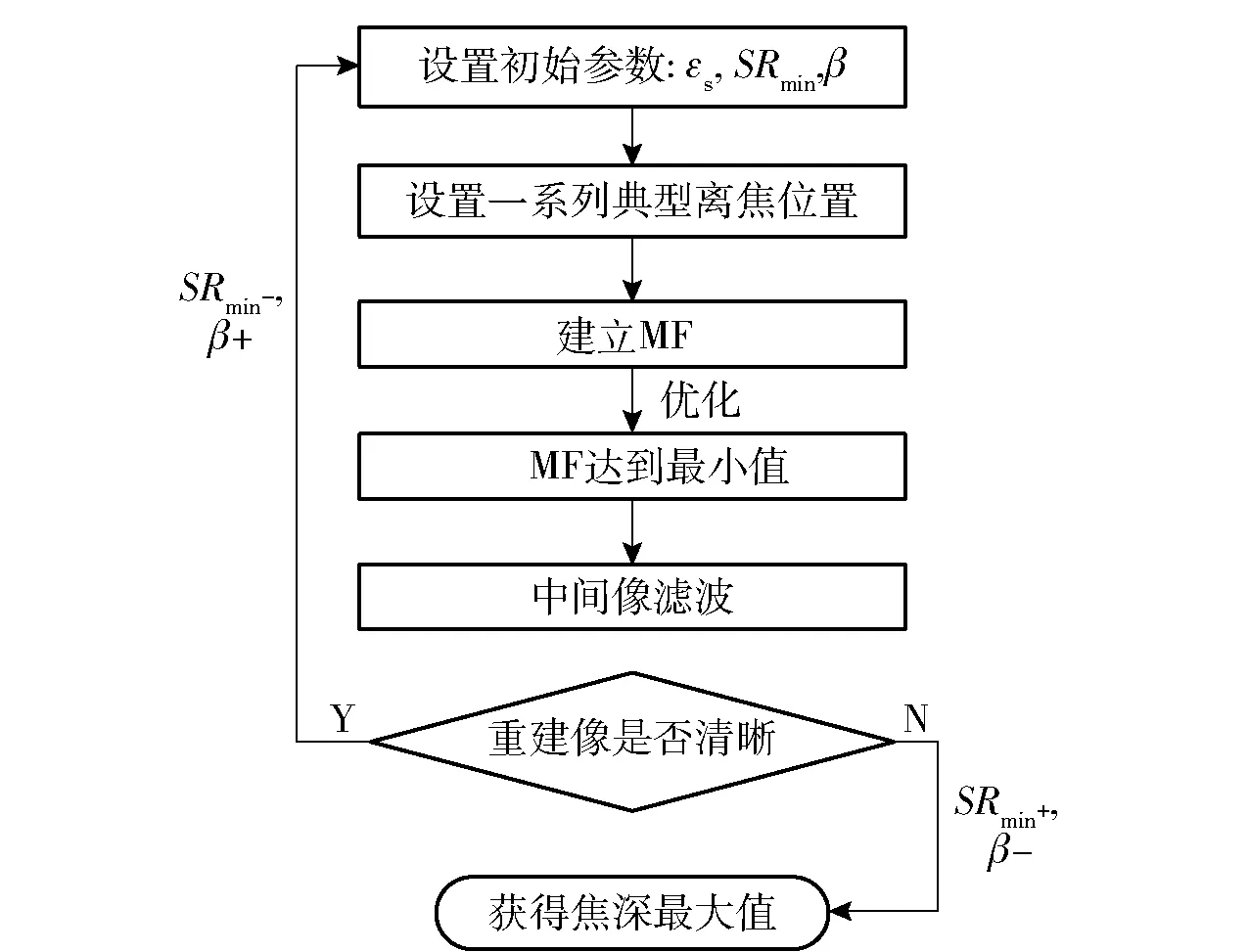
圖5 波前編碼位相板參數優化流程Fig.5 Optimizing procress of wavefront coding phase plane parameters
最終按以上方法對系統優化完成后,獲得εs=88.32,SRmin=0.05,短焦端焦深擴展±6.43倍(約為±0.225 mm),中焦、長焦端相應擴展為±4.0倍和±3.21倍。
表4為本文傳統連續變焦系統和焦深拓展后的變焦系統在不同離焦位置的PSF圖(短焦端)。由表4可以看出:傳統系統的PSF在不同離焦位置變化非常明顯,離焦達到6.43倍正常焦深時PSF與正焦時大不相同;而波前編碼變焦系統在拓展焦深范圍內大致保持一致。
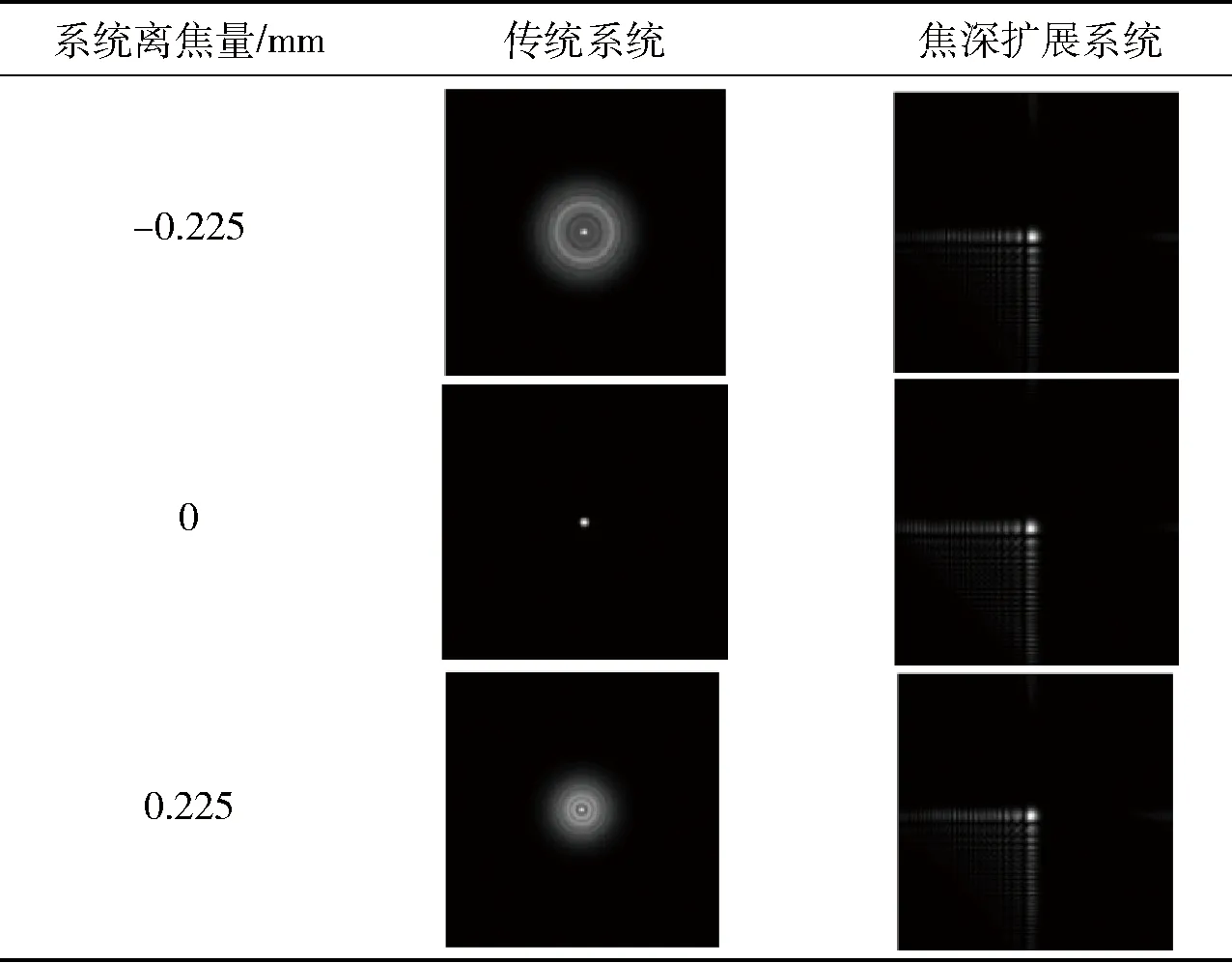
表4 傳統連續變焦系統和焦深拓展后的變焦系統在不同離焦位置的PSF圖
表5為波前編碼連續變焦系統在中焦和長焦位置的PSF圖。如表5所示,可以認為對于變焦范圍內的任意焦距,波前編碼系統在拓展焦深范圍之內的PSF基本一致。傳統系統在中焦、長焦位置,±0.225 mm也已超出相應焦深范圍,其PSF隨離焦變化情況與表4大同小異,為節省篇幅不再列出。
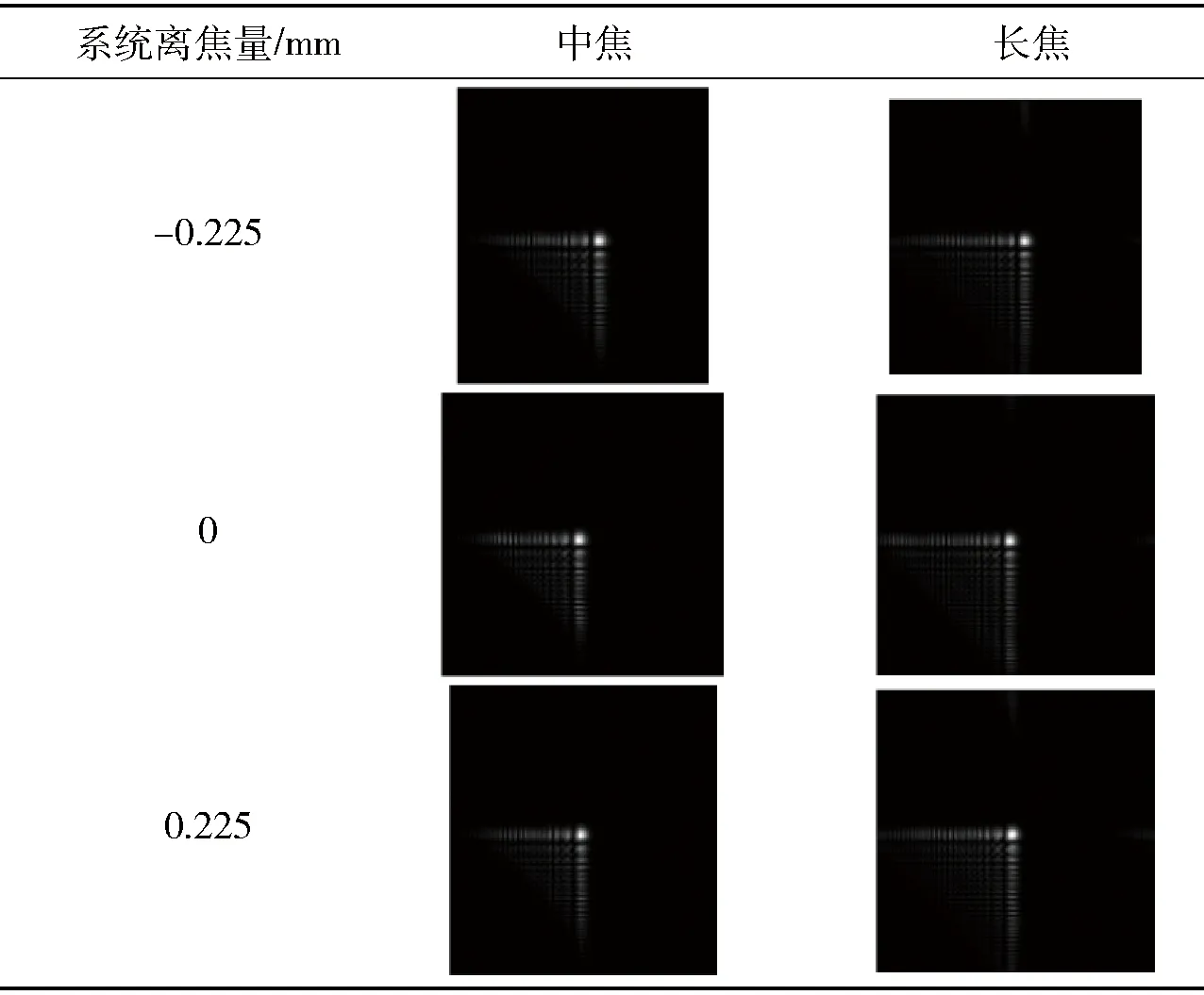
表5 波前編碼連續變焦系統在中焦和長焦、不同離焦位置的PSF圖
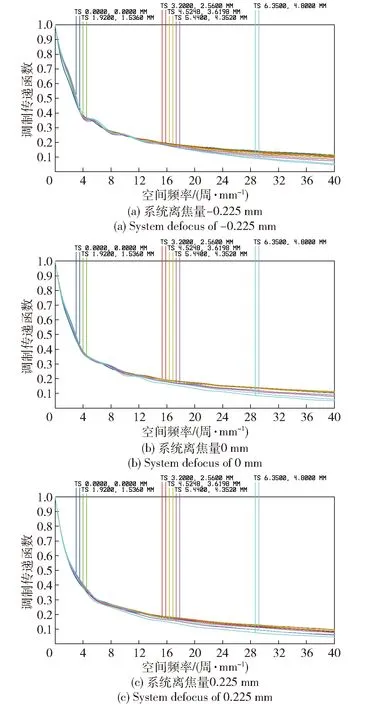
圖6 波前編碼連續變焦系統在短焦位置的MTF曲線圖Fig.6 MTF curves of wavefront coding zoom system at short EFL at different defocusing positions
圖6為波前編碼連續變焦系統在短焦位置的MTF曲線圖。由圖6可見,波前編碼系統的MTF在整個通頻帶之中沒有零點,且不同離焦量下的MTF曲線十分相似,這就使得可以利用正焦處的PSF作為濾波器,恢復各離焦點的圖像。波前編碼系統中焦、長焦位置MTF情況與短焦時大同小異,為節省篇幅忽略。
為模擬拓展焦深連續變焦系統的成像狀態,利用實際圖像進行成像模擬。表6分別為傳統連續變焦系統和拓展焦深后的連續變焦系統(短焦端)的成像情況。由表6可見:第1排分別為傳統系統在不同離焦位置處所成的像,僅正焦處成像清晰,細節未丟失,其余兩個位置的成像模糊,因此傳統系統對離焦敏感;第2排為波前編碼系統的中間像,各位置成像模糊程度近似,可見波前編碼系統具有離焦不敏感性,因此可利用對焦位置的PSF作為濾波器,對各離焦位置的中間圖像進行統一復原;第3排即為維納濾波復原像,可見兩個離焦位置相對于對焦位置被引入了一定噪聲,但圖像高頻細節基本得到復原。可見,波前編碼系統綜合利用光學和圖像處理技術,其對離焦的容忍性遠遠超過傳統系統。
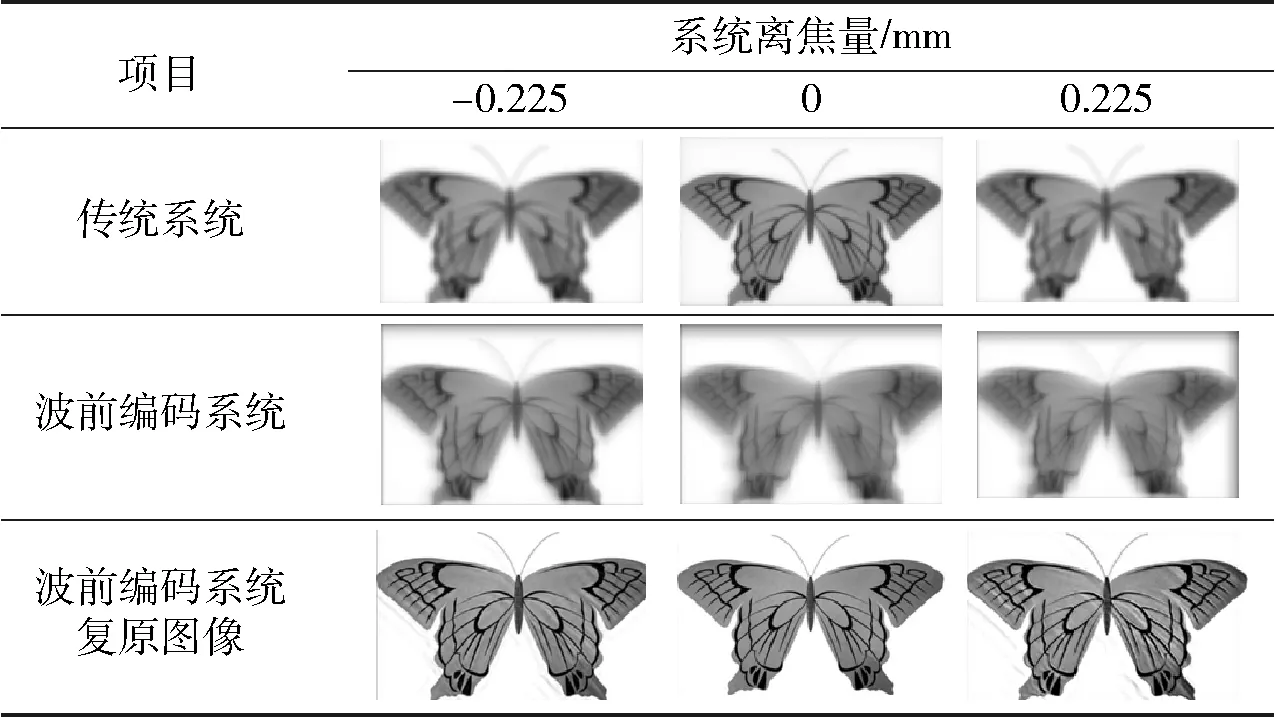
表6 傳統系統和波前編碼系統在不同離焦位置的圖像(短焦)
表7為中焦和長焦的波前編碼系統復原圖像。由于中焦、長焦F數比短焦端更大,因而原始焦深更長,在焦深范圍相等情況下相當于拓展倍率較小,因此復原出的原有圖像比短焦端更為輕松,由表7可見,比起短焦端,中焦、長焦復原圖中虛影基本消失,擁有更佳的信噪比。
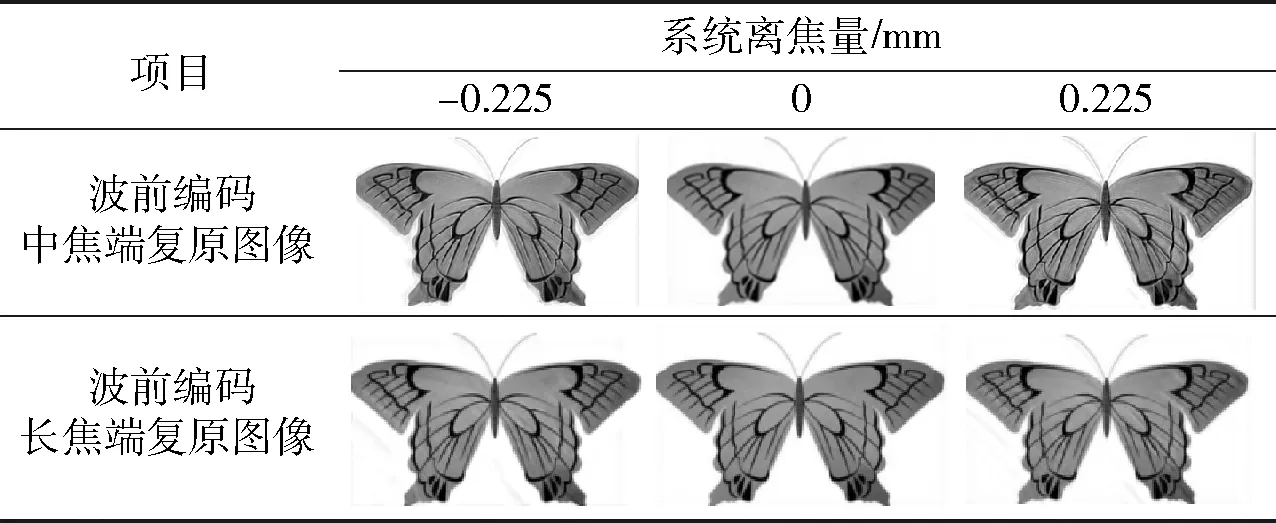
表7 波前編碼中焦和長焦復原圖像
4 實驗結果
加工了參數如3.1節所述的近紅外變焦成像樣機,并在霧霾天氣對室外景物進行了短焦、中焦、長焦近紅外成像實驗。實驗現場照片如圖7所示,樣機如圖8所示。實驗中,采用改變電荷耦合器件(CCD)像面位置的方式來對系統進行光學離焦,從而可以拍攝到約0.22 mm離焦位置的圖像。由于機械結構所限,只獲得了單一方向的離焦結果,由第3節仿真結果可知另一方向離焦大同小異。

圖7 實驗現場圖Fig.7 Expertmental scene

圖8 成像樣機圖Fig.8 Imaging prototype
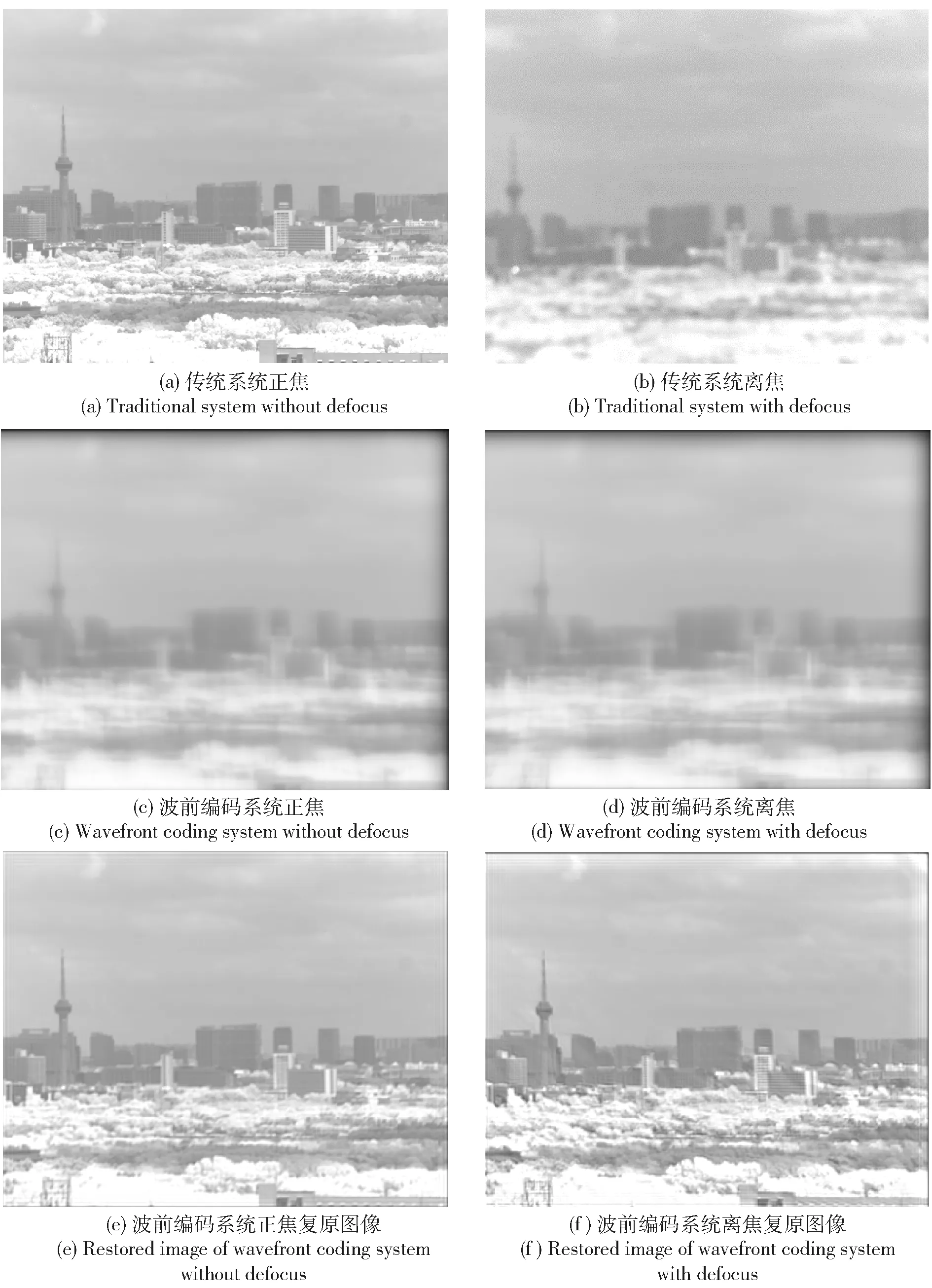
圖9 實驗中傳統系統和波前編碼系統在不同離焦位置的圖像(短焦)Fig.9 Images of traditional system and wavefront coding system at different defocusing positions in experiment (short EFL)
圖9(a)、圖9(b)為未加入波前編碼位相板的傳統系統短焦端在正焦和離焦位置的成像效果;圖9(c)、圖9(d)為加入波前編碼位相板后系統的中間像,各位置成像模糊程度近似;圖9(e)、圖9(f)為維納濾波復原像。由于篇幅所限,圖10直接給出中焦端和長焦端的波前編碼系統復原圖像。表8為圖9、圖10中各圖的峰值信噪比(PSNR)值。其中:圖9各圖的PSNR參考圖為圖9(a),圖10各圖的參考圖分別為中焦端和長焦端的傳統系統正焦位置拍攝圖。由圖9與圖10可知,相同離焦位置處,復原圖像遠比傳統系統的離焦圖像更加清晰,驗證了波前編碼系統的焦深延拓效果。比起短焦端,中焦、長焦復原圖中虛影基本消失,復原效果更佳,與仿真效果相符。
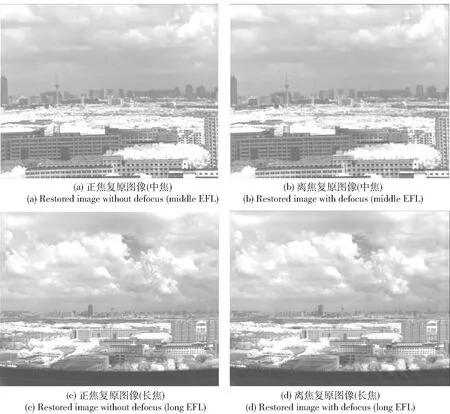
圖10 實驗中波前編碼中焦和長焦復原圖像Fig.10 Restored images of wavefront coding system at medium and long EFLs in experiment
5 結論
本文設計和加工一款基于波前編碼技術的大焦深、大靶面、連續變焦、近紅外光學系統,進行了成像模擬和實際實驗。該系統工作波段為1.20~1.67 μm,具有良好的透霧性能;探測器靶面為全畫幅,大視場搜索有利于發現目標。透鏡全部為球面面形,變焦凸輪曲線平滑,補償組移動導程很小,具有良好的加工性能。該波前編碼系統短焦(焦距18 mm)的焦深是傳統系統的6.43倍,長焦(焦距90 mm)的焦深是傳統系統的3.21倍。
該系統對中間編碼圖像進行重建時采用的是經典維納濾波算法,存在邊緣條紋、振鈴效應等問題。下一步將把研究重點放在更先進的圖像復原算法上,利用參數自適應維納算法等來繼續提高還原圖像信噪比,有望進一步擴大連續變焦系統的焦深。
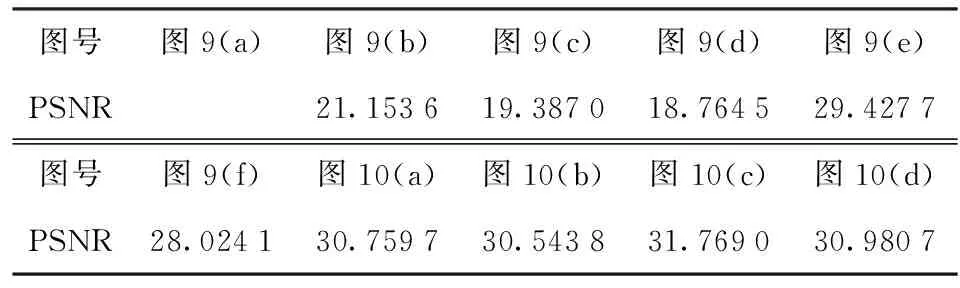
表8 圖9與圖10中各圖PSNR值Tab.8 PSNRs in Figs.9 and 10
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17