高精度定位航向系統的設計和應用
2020-10-09 10:10:17蘇章亮
中國科技縱橫 2020年9期
蘇章亮
摘 要:針對海洋施工工程、空間測量工程,包括施工船、無人機,在海洋、天空這種無參考系作業時,必須通過坐標的定位和航向來完成工程的施工。本文介紹一種高精度GNSS的系統和裝置,能夠實現亞米級的定位和航向功能,作為一種必要的航向輔助工具,可廣泛應用于海洋空間的測量施工作業工程。
關鍵詞:GNSS;航向;原理
中圖分類號:P228.4 文獻標識碼:A 文章編號:1671-2064(2020)09-0073-02
1系統框架
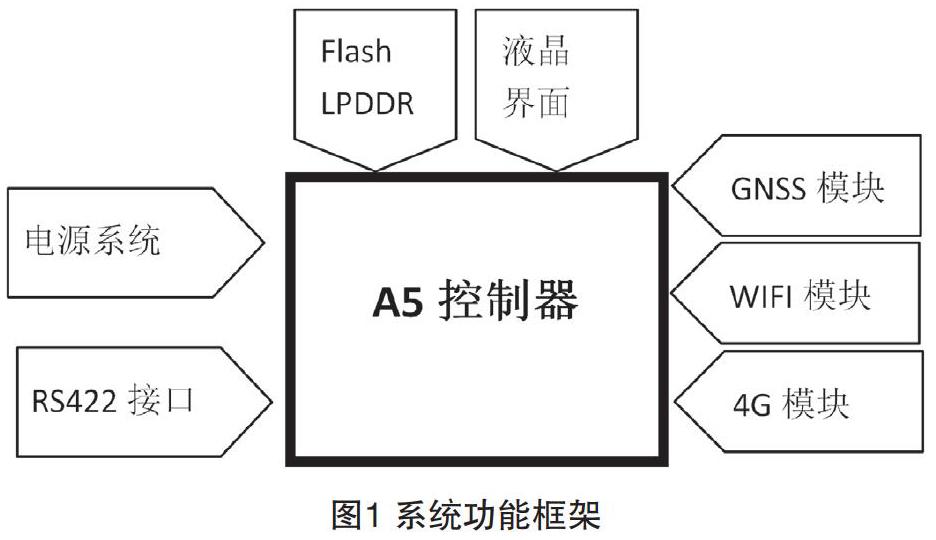
本系統裝載高精度GNSS模塊,可接收GPS、GLONASS、BDS、GALILEO多星多頻段,匹配穩定可靠的右旋圓極化全頻段天線,保證定位和定向高精度功能。本系統搭配嵌入式硬件功能平臺,包括嵌入式MCU、LPDDR2、電源管理系統、WIFI模塊、4G模塊、RS422/485接口、小尺寸液晶交互界面等。嵌入式軟件操作系統對各個功能模塊進行初始化驅動,并對定位定向數據的解算輸出。系統可通過外接通訊接口傳輸定位航向數據給到中控端,也可以通過WIFI連接傳輸數據給到手持平板接收端,實現多種連接方式接收定位航向數據。[1]
(1)嵌入式平臺:包括主MCU控制器、Flash、LPDDR,液晶交互。[2]
(2)GNSS模塊:通過天線接收多星數據,接收CORS基準站查分數據實現亞米級定位。
(3)WIFI模塊:可用于無線傳輸數據到接收端。
(4)4G模塊:通過撥號連接基準站,接收查分數據。
(5)電源管理系統:隔離穩壓輸入,提供穩定的電源給系統。
(6)RS422/485接口:隔離的數據傳輸接口,連接到中控端,提供長距離傳輸功能。
本系統的基本功能構成和框架如圖1。
2功能設計
2.1嵌入式平臺設計
本系統MCU選用SAMA5XX系列芯片,該芯片是一款基于ARMR CortexTM-A5的高性能、節能的嵌入式微處理器,主頻速度達到536MHz。32kB的數據緩存、32k的指令緩存、虛擬內存體系結構(VMSA),全集成MMU和浮點單元(VFPv4)。該芯片的核心供電電壓1.2V,低功耗模式下僅0.5W。其工業級的工作溫度:-40℃~+85℃,保證嚴苛的溫度環境下穩定運行。芯片提供豐富的外設功能接口,包括I2C、SPI、UART、USB、LCD、SDIO、網絡接口等,滿足該方案的設計需求。系統搭配512M LPDDR2 SDRAM,256M NAND Flash,并可選配8G以上的內部eMMC存儲器。
系統搭配來2.4英寸的TFT液晶,可實時顯示設備的工作狀態、數據傳輸狀態。
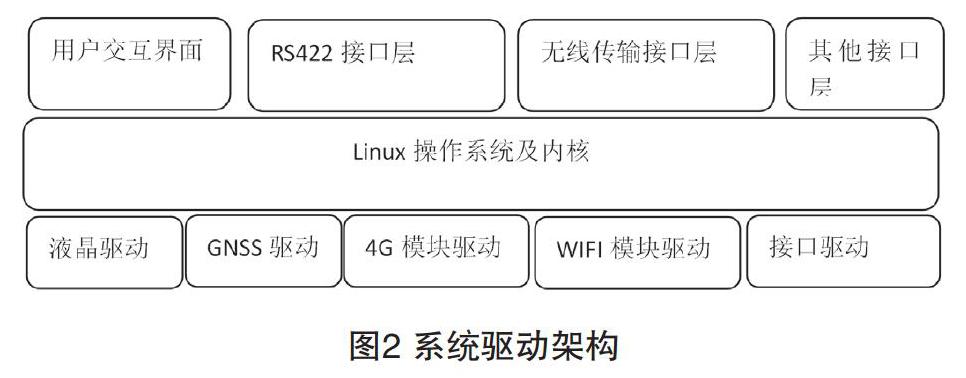
本系統移植了Linux操作系統,在底層對各個功能接口、液晶、WIFI、4G模塊、GNSS模塊進行初始化驅動,并加載上層應用軟件層,數據處理層,用戶界面層,對接口模塊和數據進行控制處理。系統基本的軟件架構如圖2。[2]
2.2 GNSS模塊
本次選用Novatel的OEM617D模塊,模塊通過USB和UART與系統連接通訊。支持GPS L1/L2、GLONASS L1/L2、BeiDou B1/B2、Galileo E1/E5b。并且實現SBAS差分功能。多星系多頻段實現高精度的定位定向功能。模塊具備HEHDT或GPHDT航向輸出,精度≤0.3度RMS,支持差分定位DGPS解算功能,水平精度達到0.4m RMS。在L1/L2的模式下水平精度達到1.2m RMS。可通過網絡接收基準站查分數據,達到亞米級的定位級別。模塊支持1pps脈沖信號輸出,實現與遠程設備的同步。[1]
2.3無線傳輸設計
2.3.1 WIFI模塊設計
系統選用帶AP功能的WFxxx-E系列的WIFI模塊。支持IEEE80.11 b/g/n協議,使用SDIO接口與系統連接。模塊使用系統穩壓的3.3V電源供電。無線設備端通過WIFI連接到本系統的WIFI模塊,可以通過網頁配置端,查看系統的設備信息,衛星定位數據和航向數值。
2.3.2 4G模塊設計
系統選用EC20系列LTE模塊,該模塊使用3GPP Rel.9 LTE技術,提供100Mbps的下行鏈路和50Mbps的上行鏈路速率,覆蓋全球LTE、UMTS/HSPA+、GSM/GPRS/EDGE范圍。模塊使用MIMO技術滿足對速率和鏈路可靠性的要求。使用該模塊時需要在系統端設置公網IP地址219.xxx.xxx.xxx,設置端口為2018,通過撥號連接登錄基準站網絡,接收基準站的差查分數據源,通過對查分源的解算實現高精度網絡差分定位。在系統驅動時注意上電邏輯的控制,斷電前需對模塊FULL_CARD_POWER_OFF管腳進行拉低處理0.3s后才能操作電源斷電,確保模塊正常關閉。
2.4電源管理系統設計
考慮到設備可能應用在作業船上,船上的電機馬達提供的電源極不穩定,可能存在高峰浪涌。所以在電源設計上需保證具有浪涌防護功能。本系統選用Linear公司的LT4363浪涌抑制芯片,具備4V~80V超寬工作電壓,滿足鋰電池供電和電機供電。該芯片利用VCC箝位可承受高于100V的浪涌,快速過流限制在5us內,有效的保護后級電路不被浪涌沖擊,保證系統電源穩定工作。該芯片具備可調節的輸出電壓箝位,通過配置FB管腳的電阻達到限制輸出電壓目的,基于本次系統內部供電需求,把箝位配置在36V以內,防止過高的輸入電壓損壞內部電源鏈路。該芯片還支持可調的高低電壓比較門限,通過內置的精密比較器檢測OV/UV管腳的過壓、欠壓條件,單電壓低于內部閥值1.275V時,其內部MOSFET管即會關斷,當高于其閥值時,內部GATE會重新打開,回復正常電壓范圍。本次應用中,OV/UV設置在6V~36V之間,確保覆蓋實際應用的輸入電壓范圍,同時箝位其他范圍電壓,保證輸入端電源穩定性。該芯片具備過流檢測功能,通過配置SNS和OUT管腳之間的電阻值,完成限制電流電路的功能,該限流功能限制柵極管腳,把電壓差值限制在50mV以內。當電流瞬間增大到限制范圍,電路處于故障狀態,電流檢測端口能夠識別到并快速關斷柵極引腳。本次配置限流電阻為15mΩ,把電流限制在3.3A以內,已確保系統電路安全。該芯片功能強大,能夠對輸入端、輸出端電壓進行可調節的箝位,并能夠配置限流范圍,滿足不同使用環境下的針對性配置。
基于多種可能的寬電壓源輸入,系統需要一個穩定的3.3V電壓供電。本系統設計使用一個降壓DCDC穩壓芯片,把輸入電壓穩壓到3.3V供系統使用。選用LT8614系列同步壓降型芯片,該芯片具有高達96%的工作效率,超寬的輸入電壓:3.4V~42V,以及超低的2.5uA的IQ靜態電流,同步輸出電流最高可達4A。
2.5接口設計
為滿足船上長距離的傳輸需求,本系統除了短距離無線傳輸模式,還設計了滿足長距離傳輸的RS422/485連接接口。RS422/458接口規范,理論傳輸距離可大1km,能夠滿足各種規模船體的傳輸要求。全雙工RS422接口,能夠實現數據的輸入輸出功能。RS485接口可以作為輸出的應用環境下。
3航向系統應用
本系統可裝配在各種船體、無人船、無人機上,為作業人員提供定位和航向功能。本系統提供兩種數據傳輸方式:第一,可通過RS422/485,使用電纜線連接到主控制端/PC端,在應用軟件上查看定位、航行狀態;第二,可通過無線WIFI連接方式,使用帶有WIFI功能的平板、筆記本電腦等,連接到設備端,同樣使用應用軟件查看船體/無人機的定位和航向。本系統需配套開發應用軟件,軟件協議接口需與本系統匹配。基本航向作業如圖3。
本系統設計了自動巡航控制系統,適合應用在無人船、無人機上。通過基站控制端軟件,預先設置測量的坐標范圍和航向,把坐標、航向數據發送到測量設備上,利用自動巡航系統,完成對指定作業區域的測量工作。PC端軟件導入在線/本地的待測地圖后,在地圖上對測量空間范圍畫出待測的區域和測量航向。通過無線網絡(WIFI、4G網絡),把測量地圖傳輸到無人機上,無人機系統實時讀取本系統傳輸過來的坐標和航向數據,能夠在測量過程中調整定位和航行狀態,完成對指定地圖區域的測量工作。
自動巡航測量過程中,本地監控軟件能夠查看無人機的測量航線,如果出現偏移指定坐標和測量范圍,本地端能夠及時進行人工干預,調整測量航向。無人機測量過程中,測量數據實時更新在本地系統,完成對測量數據的加載。同時也可以在測量結束后,通過無線/有線連接到PC端,把數據下載到本地,在本地進行后數據處理和顯示。無人機/無人船加本定位航向系統,能夠實現自動巡航測量作業。相對于原來人工操控作業,該應用功能極大方便了測量作業,縮短了測量時間,提高了工作效率。
參考文獻
[1] 李天文.GPS原理與應用[M].北京:科學出版社,2019.
[2] 錢曉捷,程楠.嵌入式系統導論[M].北京:電子工業出版社,2017.
