ADS-B與空管監視雷達的融合處理方式分析
2020-10-10 06:38:22郝娜
通信電源技術 2020年12期
郝 娜
(民航新疆空中交通管理局技術保障中心,新疆 烏魯木齊 830016)
0 引 言
空管系統普遍使用雷達監視航空器,但雷達在應用中存在盲區,無法在一些特殊區域安裝。為了獲得監視空域的良好效果,需改進航空系統的協同避讓性能。目前,民航系統正在建設ADS-B工程,這是因為飛行流量的不斷增加對空管監視技術提出了更高的要求。ADS-B可以對較好地覆蓋盲區,通過有機整合ADS-B與雷達,提高空域監視的效率。
1 ADS-B與雷達概述
1.1 ADS-B
1.1.1 ADS-B基本情況
ADS-B中文名稱為廣播式自動相關監視。ADS-B不需要人工參與運作,利用自身依附的載體設施,與其他ADS-B載體或地面設備一起獲取與傳輸信息。自身載體一般可獲取方位、飛行高度、前方障礙以及航行速度等信息。獲取信息后,以電文方式傳輸至需要這些信息的設備。通過這樣的方式全面管控設備,降低發生飛行事故的概率。ADS-B形成于自動監管ADS系統,最初監控越洋飛行器,解決雷達設管區域局限的問題。現今ADS-B技術日趨成熟,并在航天航空領域內得到了廣泛應用。
1.1.2 ADS-B的應用優勢
ADS-B整合了各種現代化信息技術,如通信技術、定位導航技術以及地面設備技術等,可有效提高設備運行效率,對航空監視區域實現整體覆蓋,有利于飛行員與管理員了解風險,保證航空交通安全。相較于傳統的空管雷達方式,ADS-B優勢顯著。第一,ADS-B地面站在多種環境應用,打破了地形約束,節省了成本且維護方便。第二,ADS-B可精確定位,有效增強航空器的協同能力,一定程度上減小了飛行間隔,增加了空域容量和空中流量。第三,ADS-B將更多目標信息提供給地面管制人員與飛行員,達到了一體化監視目的,充分確保了空中與地面、空中與空中及地面與地面的監視效果。雷達本身特點導致其無法安裝在全部地形環境內,而利用ADS-B可以較好地解決這個問題[1]。
1.2 雷達的定義和特點
1.2.1 雷達的定義
雷達采取無線電方法測定目標。雷達的兩個基本任務是發現目標與測量目標。雷達可控制飛機的間隔,掌握飛機的位置,判斷飛機的類型,還可以幫助飛行員導航,發送危險告警。
1.2.2 雷達的特點
一次雷達是相對獨立的非合作監視。獨立性指用戶通過合理的方法鎖定目標,并得到相關的信息。非合作性是指目標無需任何裝備。二次雷達是有獨立特點的合作監視,用戶通過詢問與機載設備實現應答估計,但若飛機未配置應答機或應答機停止工作,則無法實現監視。
目前,二次監視雷達包括A/C模式和S模式。A/C模式應答機有效識別飛機身份并得到相關飛行信息,因此地面站可得到有關目標的三維信息與身份信息。S模式二次雷達完善了AC模式,包括A/C模式的全部功能,并可以選擇性詢問。二次雷達系統除了提供全面的信息之外,還有一些其他顯著特征[2]。
(1)發射功率小。二次雷達地面站發射功率小于一次雷達,因為二次雷達有獨立的發射機。同樣,二次雷達應答機的接收機靈敏度較低。
(2)提供豐富的信息。二次雷達系統可開展編碼工作,機載應答機提供豐富的信息,如距離、方位以及飛機代碼等。
(3)不存在目標閃爍現象。目標發射能量不會形成二次雷達的回波,由機載應答機提供自主輻射信號,與目標對應的反射面積無任何聯系。
2 ADS-B與空管監視雷達數據融合處理
2.1 ADS-B航跡的形成
ADS-B目標與唯一地址編碼對應,有效關聯了航空器信息,從而獲得有效信息。在ADS-B系統中,航跡信息通過飛機獲得,且以航班與呼號標識每個航空器的報文,避免發生信息混淆。航跡濾波利用科學算法對觀測數據實現濾波,對丟失數據進行平滑處理,保證數據的準確性。如果ADS-B長期無法獲得報告,說明飛機終止了航跡[3]。
2.2 雷達目標跟蹤
雷達跟蹤目標的航跡具體如下:(1)航跡頭,這是每條航線的第1點跡;(2)航跡起始,當雷達開展二次掃描時,按出示波門,關聯掃描點跡,利用兩點預測外推法。外推時假定目標開展直線勻速運動,設計第i個目標的第j次測量數值為zi(j),坐標點位(xi,yi)。按照運動方程,第3點的預測外推值坐標為:

其中,T代表采樣間隔,V代表y方向上目標的運動速度。
目標速度為:
航跡融合包括集中式、分布式和混合式。考慮實際情況,本文以分布式融合模型有機聯系ADS-B和雷達航跡。經分析可知,每個傳感器都有獨特的航跡處理器,它們在處理數據中產生獨立的航跡,如此保證不會因為降低某個傳感器的點跡質量而干擾系統航跡質量。該模型的數據融合包括對各單個雷達數據實現融合和對多雷達航跡與ADS-B航跡融合產生航跡,通過互相發揮作用,提高航飛系統的運行水平。
2.3 航跡濾波處理
2.3.1 跟蹤濾波算
Kalman濾波算法通過建立最小均方差原則實現估計操作。它以線性遞推的方式,對多個數據和信號參數進行處理和測量,得到的最大均方誤差無任何差異。Kalman濾波器具有遞歸、線性與最小方差特點。若過程噪聲和觀測噪聲屬正態高斯白噪聲,則它可以充分發揮自身的優勢,即對線性與高斯問題,Kalman濾波器設計最合理。
飛機在勻速運動過程中,α-β濾波器與Kalman濾波器形成了相同的效果。當目標運動呈隨機性時,Kalman濾波器的性能明顯比α-β濾波器高。當飛機作勻速運動時,α-β-γ濾波器更適合。它利用激動檢測合理調節濾波增益,優化性能。若修正的算法過于復雜,則無法充分體現計算常增益濾波量最小優勢。Kalman濾波器的適應能力較強,可提高實時處理效率。
飛機一般根據預先設定的航線開展勻速直線飛行。當飛機把部分隨機擾動作為零均值獲得高斯白噪聲序列時,說明它正在進行勻速直線運動,此時通過Kalman濾波器開展飛機追蹤濾波操作。但是,飛機在現實中無法總開展勻速直線運動,會出現部分隨機運動,如轉彎、陣風等,此時將噪聲作為非零均值與實際情況更符合,這就要求飛機利用自適應模型運動。當數學模型和實際目標運動模式高度契合時,Kalman濾波可發揮最大化優勢。
2.3.2 目標跟蹤模型
目標跟蹤主要對目標的狀態軌跡實現估計。目標狀態模型在不斷變化的狀態下描述目標運動過程,以目標作為一個點源實現建模。日常使用的模型包括CV模型、CA模型和Singer模型。其中,Singer模型與統計模型同屬于自適應追蹤算法模型,特點是考慮目標全部的可能動機,適用于各種類型的目標動機。
3 ADS-B與空管監視雷達的融合處理方式的應用
3.1 時間對準
航管雷達和ADS-B系統根據一定的時間次序完成對空監視。處理多雷達監視數據時,要注意保持時序的精確性。航管雷達天線一般轉動周期為4 s、10 s和12 s,并根據相關規范劃分雷達掃描全空域為32個扇區。大部分情況可根據接收的雷達正北報明確探測目標時序,在正北報不足或缺少的情況下建立模型:

其中,Tr=[t1,t2,…,tn]代表雷達逐扇對某一時刻推進的時序進行掃描,T1代表第1部雷達持續轉動k個扇區且傳遞探測數據消耗的時間。
此外,有:
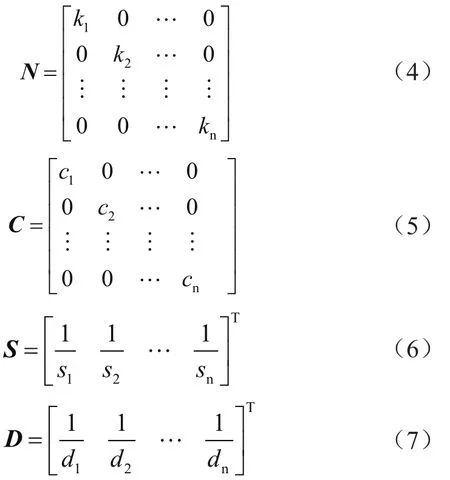
第1部雷達持續累加轉動的扇區數位k1,結合雷達自身轉速順次異步增加1;c1是第1部雷達天線掃描的時間;s1代表第1部雷達對空域進行掃描,合理劃分扇區;d1代表第1部雷達傳遞目標報告的通信時間。
因此,式(3)可完善為:
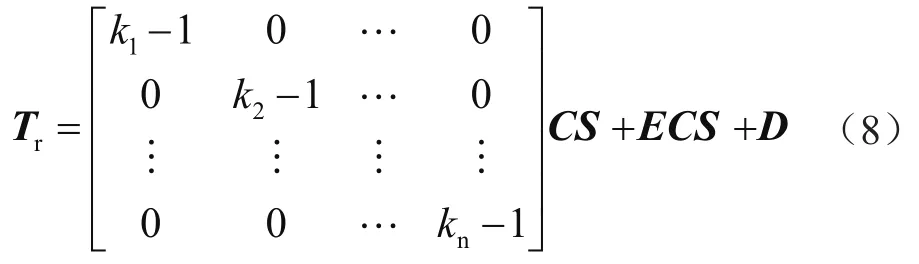
其中,單位陣是E。式(8)代表了可信度較高的雷達目標時序。通過上一次雷達發送報文的時間和間隔,能得到下一次的報文時序。
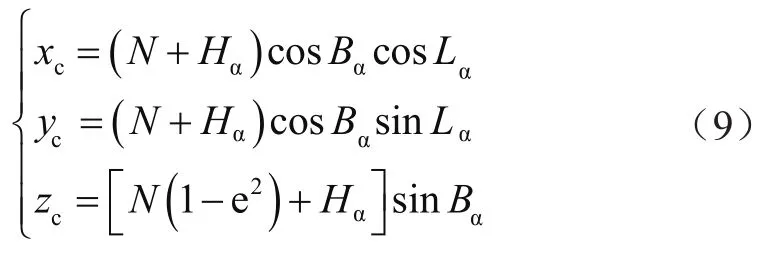
3.2 空間對準
ADS-B報告的目標是大地坐標系位置Lα=[LαBαHα],航管雷達提供了雷達站心極坐標系位置Lr=[rrθrhr]。在處理計算外推、濾波等數據之前,需要轉換到北天東笛卡爾中央坐標系位置Xc=[xcyczc]:
經過分析融合數據可知:利用混搭式數據融合算法輸出數據位置誤差不會超過3 km,屬于允許范圍,結果達到了規定要求,可以精確管理航空數據。
4 結 論
我國的民航正在建立ADS-B空監工程,并逐步肯定了ADS-B的優勢。ADS-B與雷達系統的融合,不僅有利于采集空中流量信息,還提升了空中對空中、空中對地面的協調能力。因此,必須努力推動ADS-B技術與雷達技術的融合,共同構建安全的航空環境。
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
中華手工(2017年2期)2017-06-06 23:00:31
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
中外會展(2014年4期)2014-11-27 07:46:46
