一種艦載RCS測量雷達極化補償方法
2020-10-20 13:27:40史厚寶
艦船電子對抗 2020年4期
史厚寶,顧 兵
(中國船舶重工集團公司第七二三研究所,江蘇 揚州 225101)
0 引 言
艦載雷達截面(RCS)測量雷達,在對目標極化特性進行測量時,如果艦船搖擺,天線極化方向將隨之不斷發生變化,此時進行極化特性測量則必將導致目標極化特性測量結果錯誤,因此必須采取極化補償措施克服艦船搖擺對目標極化測量的影響。傳統的方法是采用穩定平臺的方式,即將整個測量雷達放在穩定平臺上,由穩定平臺來克服艦船的搖擺[1]。由于此種穩定方式不僅要克服整個雷達的搖擺,還要克服風阻力對穩定平臺的影響,穩定平臺不僅體積大、重量重、成本高、適裝性差而且控制精度很難做高。本文提出一種通過扭轉饋源極化的方式來穩定天線的極化,此種方法是在兩軸跟蹤雷達的基礎上,根據極化變化而單獨采用饋源扭極化裝置對極化進行補償的一種方法,此種穩定方式不僅輕巧、靈活、精度高而且不影響雷達的適裝性。
1 各坐標系定義
1.1 地理坐標系
地理坐標系定義為y軸指向地理北,x軸指向地理東,z軸由右手定理垂直于地理表面向上,具體坐標系規定如圖1所示。
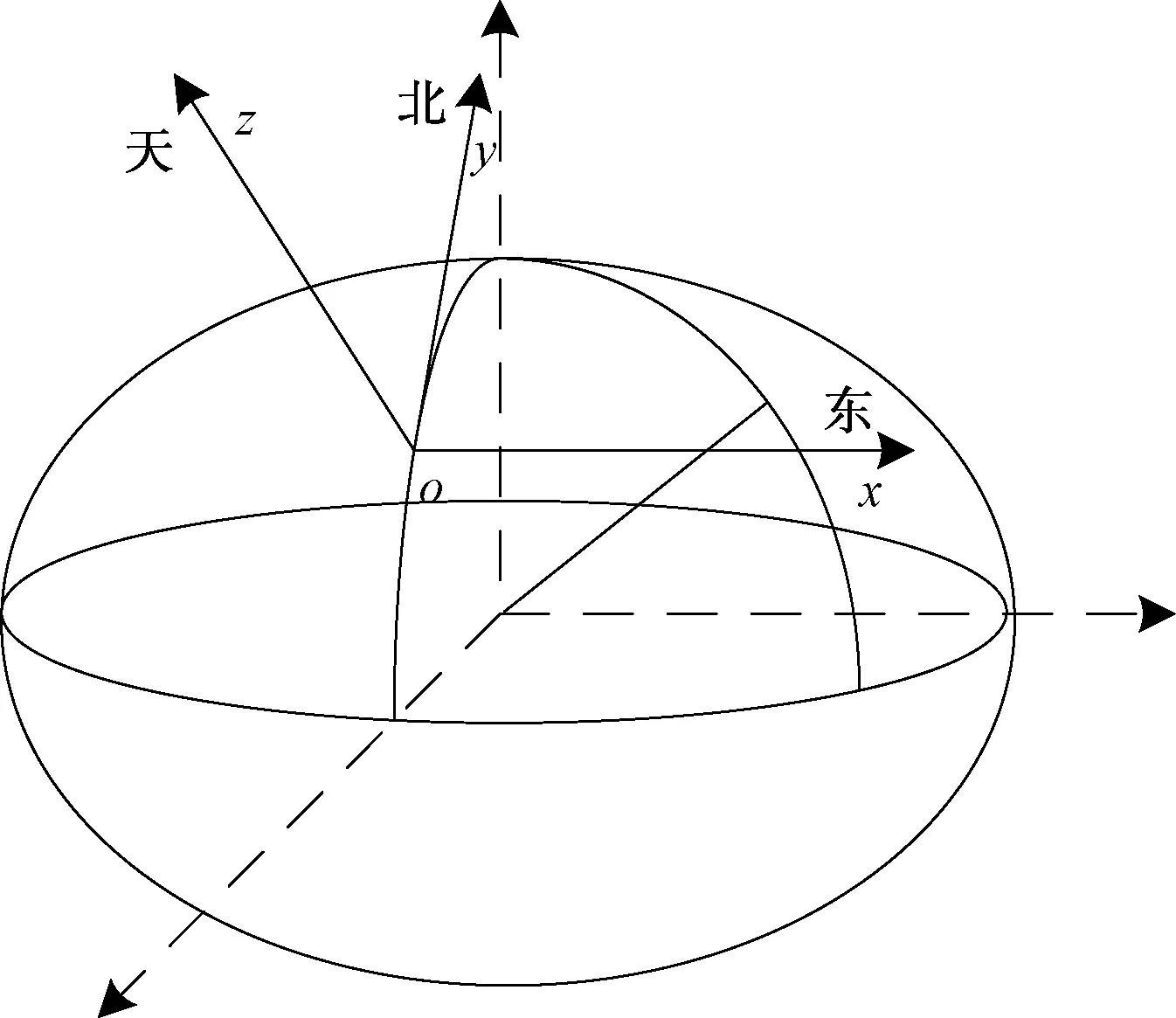
圖1 大地坐標系示意圖
1.2 甲板坐標系
甲板坐標系的定義為y′軸指向艦艏,x′軸指向右舷,z′軸由右手定理獲得垂直于x′軸、y′軸構成的平面,具體坐標系規定如圖2所示。
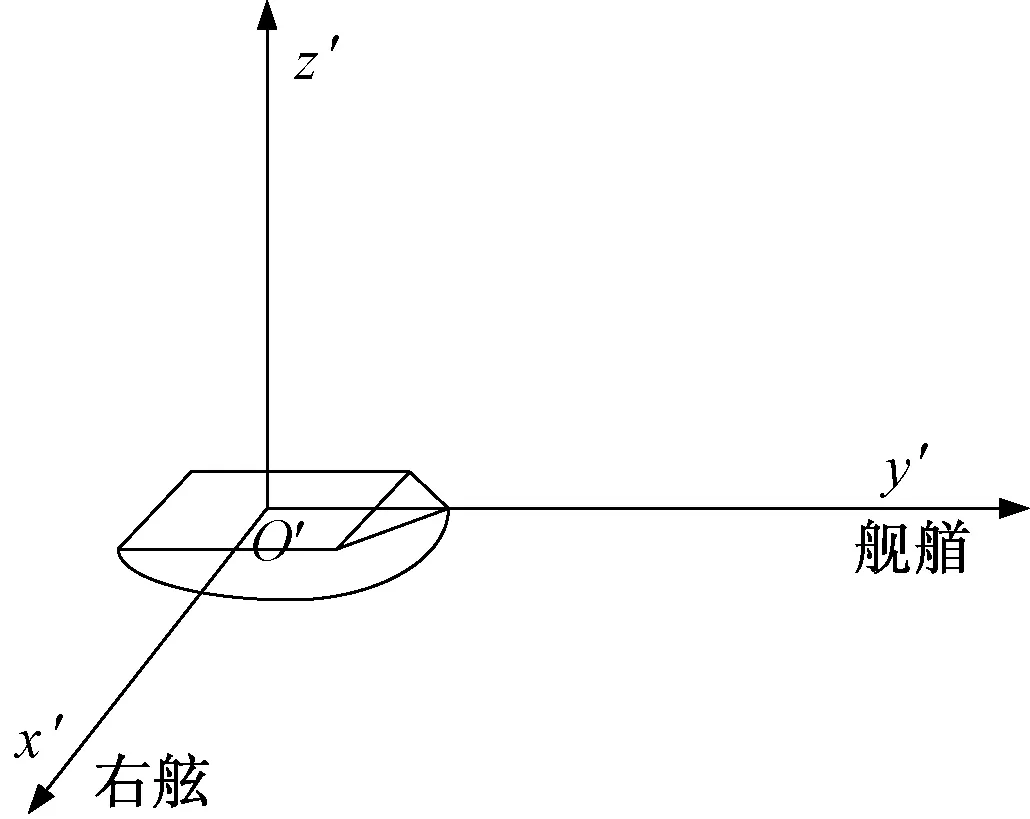
圖2 甲板坐標系示意圖
1.3 天線坐標系
天線坐標系的定義為y″軸指向天線法向,x″軸為天線所在平面指向右側,z″軸可根據右手定理得到在天線所在平面指向上,具體坐標系規定如圖3所示。
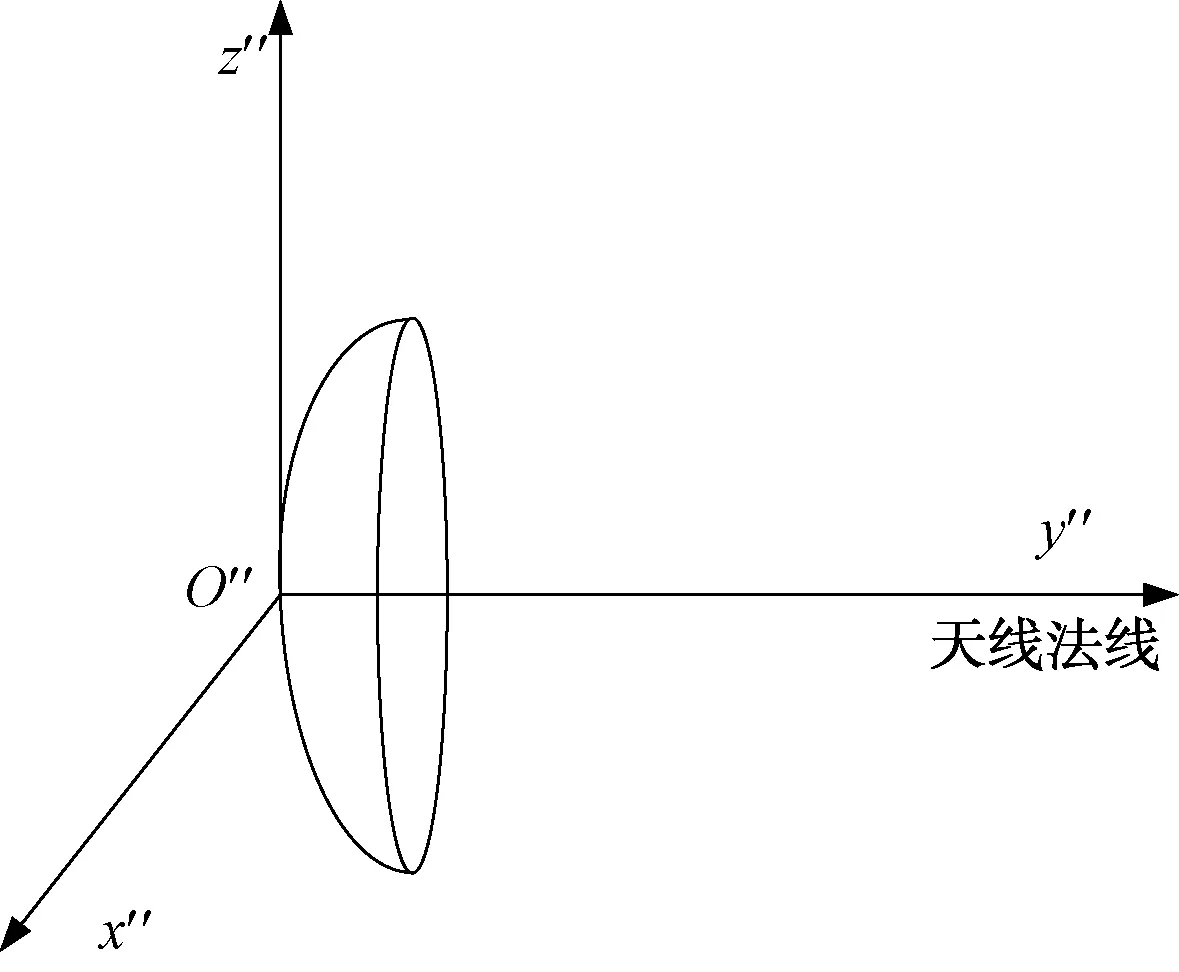
圖3 天線坐標系示意圖
1.4 各坐標系之間的關系
甲板坐標系與地理坐標系之間的關系如圖4所示,艦船的航向、縱搖、橫搖定義符合卡爾丹環架結構[2],航向H(為艦艏線在xoy平面內的投影與y軸之間的夾角,右偏為正),橫搖p(艦艏線與其在xoy平面內的投影的夾角,上仰為正),橫搖R(右舷與其在xoy平面內投影的夾角,下俯為正)。
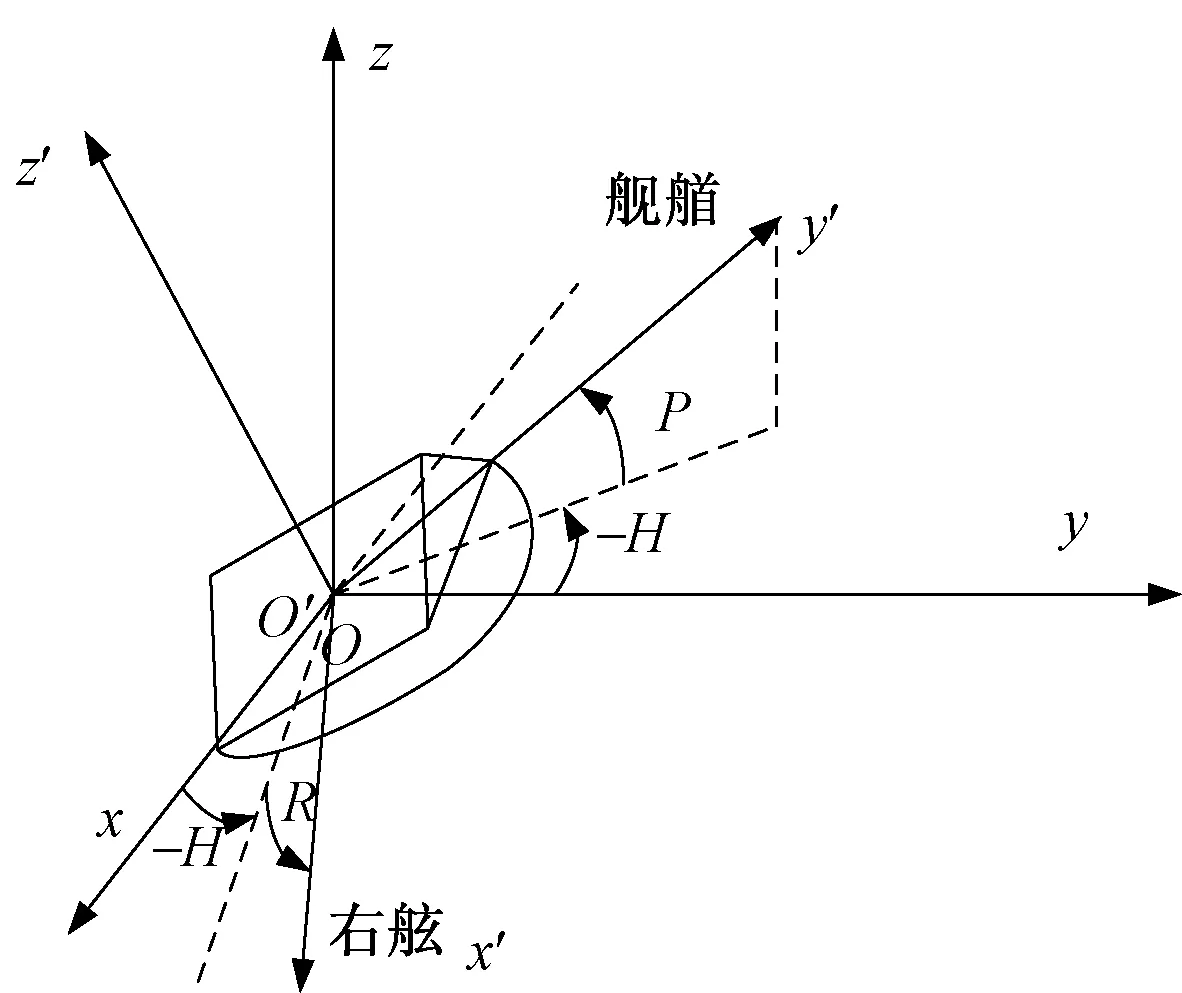
圖4 甲板坐標系與地理坐標系之間關系示意圖
天線坐標系與甲板坐標系之間的關系如圖5所示,天線相對甲板坐標系的方位為A(天線法向軸y′在xy平面內投影與艦艏y軸的夾角右偏為正),俯仰角為E(天線法向軸y′與xy平面之間的夾角,上仰為正),橫傾為R(x′z′面繞y′軸旋轉的角度)。
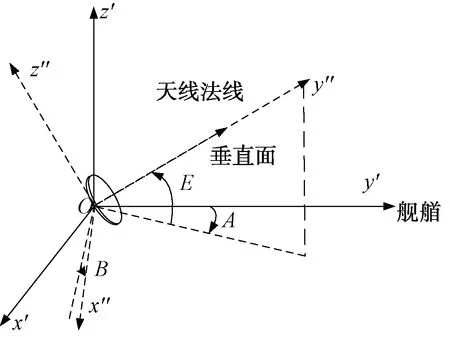
圖5 天線標系與甲板坐標系之間關系示意圖
綜合上述坐標系之間的關系可知,甲板坐標系與地理坐標系可通過導航信息實現相互轉換,天線坐標系和甲板坐標系可以通過天線相對甲板的姿態信息實現轉換,那么天線坐標系與地理坐標系之間可以甲板坐標系為媒介實現相互轉換。
2 極化補償角數學表示
天線極化方向,如圖6所示,垂直極化時平行于z″軸,水平極化時平行于x″軸,因此對于極化的變化可以看成是天線坐標軸的變化。因此只要知道天線坐標軸相對于地理坐標的變化便可以獲得極化相對地理坐標的變化。
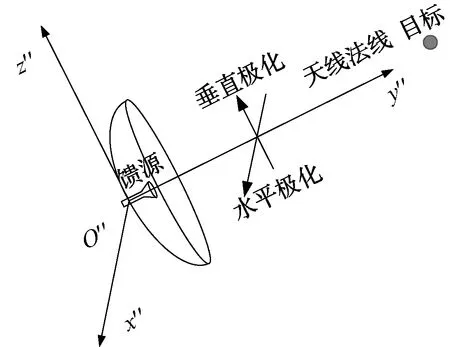
圖6 天線極化方向示意圖
為了獲得天線坐標相對地理坐標的狀態,需以甲板坐標系為媒介,將艦船縱橫搖轉換為天線的縱橫搖。設艦船的航向為H,縱搖為P、橫滾為R;天線相對于艦船的姿態方位為A,俯仰為E、橫傾為B,具體見上圖,那么可以通過坐標旋轉變換將艦船的縱橫搖轉換為天線的縱橫搖,轉換關系如下:
(1)
式中:R′、P′、H′分別為天線相對大地的橫搖、縱搖橫航向;MB為橫滾旋轉矩陣;ME為仰角旋轉矩陣;MA為方位旋轉矩陣。
其表達式分別為:
(2)
(3)
(4)
則:

(5)
由式(3)可得:
R′=R(cosAcosB+sinAsinEsinB)-P·(cosBsinA-cosAsinEsinB)-HcosEsinB
(6)
橫滾B是天線相對甲板平面的安裝橫滾角,設備與甲板安裝為剛性連接,通常情況下B=0,則:
R′=RcosA-PsinA
(7)
由式(7)可知,R′與縱搖P、橫搖R、天線相對艦船的方位A有關。一般情況下,縱搖P、橫搖R可以通過導航信息獲取;天線相對艦船的方位A與目標的位置有關,因此需根據目標位置獲取天線相對艦船的方位A。
這里主要討論角度上的轉換關系,為方便討論設目標在大地坐標下的角度分別為:方位φ,俯仰為θ,長度為單位長度,則目標可以表示為:
(8)
由坐標系旋轉變換關系[3-5],目標在甲板坐標系下的坐標可表示為:
(9)
式中:x′、y′、z′為甲板坐標系下的坐標;Rt、Pt、Ht為旋轉變換矩陣:
(10)
(11)
(12)
則:

(13)
則:
(14)
由式(14)便可得到天線相對甲板的方位A,將A代入式(7)便可獲得實時的縱橫搖狀態下跟蹤此目標時天線極化的變化。
3 仿真與討論
(1) 極化補償范圍
艦船搖擺根據海情一般有一定的范圍,例如5級海情下,艦船的橫搖≤10°,縱搖≤7°,設縱搖P=7°,橫搖R分別為-10°、-5°、0°、5°、10°時,天線相對艦船360°旋轉時,極化扭轉角如圖7所示。
(2) 測量目標時的極化補償
在對目標進行測量時,雷達穩定跟蹤目標,假設目標位置不變,討論縱橫搖及航向發生變化時的極化變化情況。
(a) 目標不變,不同航向、不同縱搖下,極化隨橫搖變化
從圖8、圖9仿真結果可以看出,當目標固定在正北,航向也在正北位置時,測量雷達穩定跟蹤目標則其也指向正北,此時極化變化與艦船橫搖線性變化,縱搖變化影響極小。在保持以上條件不變、將航向調轉90°后,此時極化變化與艦船縱搖同步變化,艦船橫搖基本沒有影響。上述仿真結果和實際情況吻合。
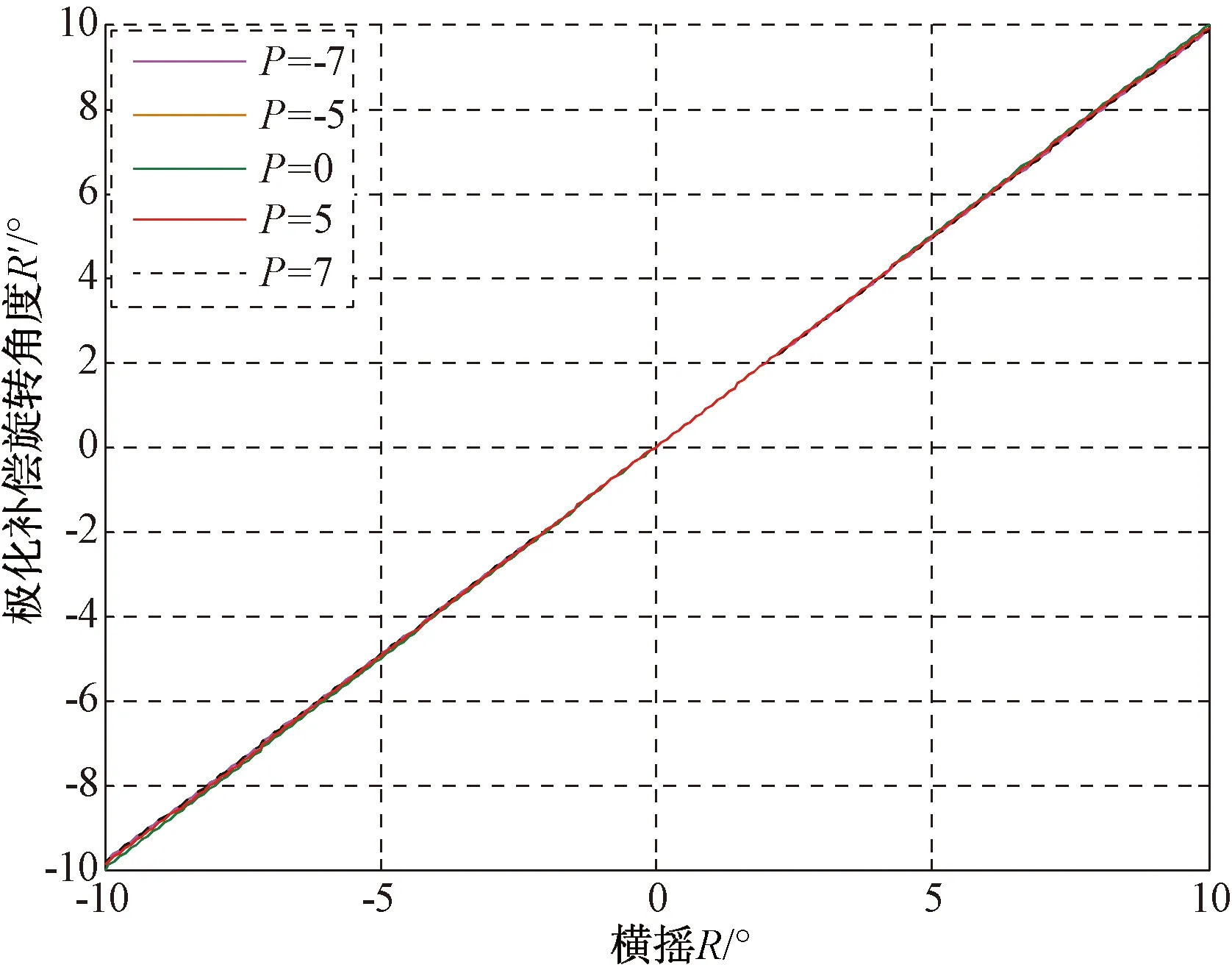
圖8 目標方位0°,俯仰0°,航向0°,不同縱搖下極化隨橫搖變化
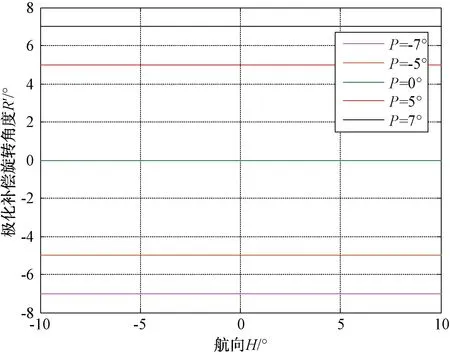
圖9 目標方位0°,俯仰0°,航向90°,不同縱搖下極化隨橫搖變化
(b) 目標不變,縱橫搖固定,極化隨航向變化
從圖10、圖11仿真結果可以看出,當目標固定在正北、縱搖為0°時,不同橫搖下,極化補償角隨航向成余弦變化;在航向90°及180°時即雷達垂直艦船航向時,艦船橫搖不影響極化補償角變化。保持橫搖為0°,不同縱搖下,極化補償角隨航向正弦變化;在航向0°(360°)及180°時即雷達平行于艦船航向時,艦船縱搖不影響極化補償角變化。上述仿真結果和實際情況吻合。
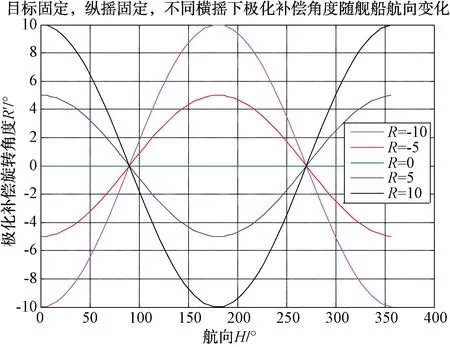
圖10 目標方位0°,俯仰0°,艦船縱搖0°,不同橫搖下極化隨航向變化
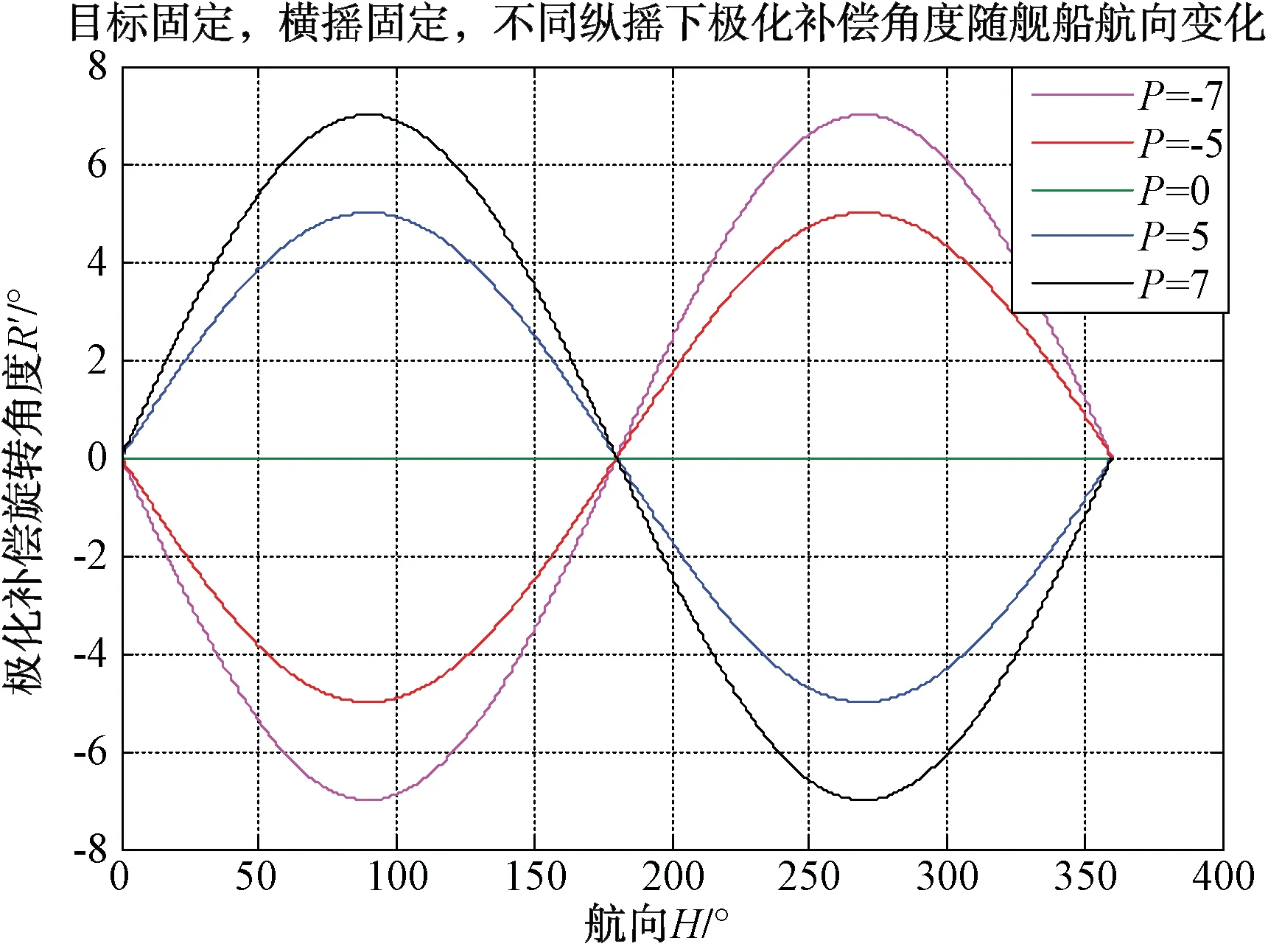
圖11 目標方位0°,俯仰0°,艦船橫搖0°,不同縱搖下極化隨航向變化
4 結束語
本文提出一種通過扭轉饋源極化的方式來穩定天線極化的方法,對極化補償角進行了理論推導,同時對結果進行了仿真驗證,從仿真計算結果看,本文所采用方式與實際情況吻合。本文結果可用于指導針狀波束反射面類測量雷達的極化穩定。